(Л
4
00
to
4
00 00
Фиг.1
Изобретение относится к машиностроению и может применяться в системах управления.
Цель изобретения - повышение точности устройства.
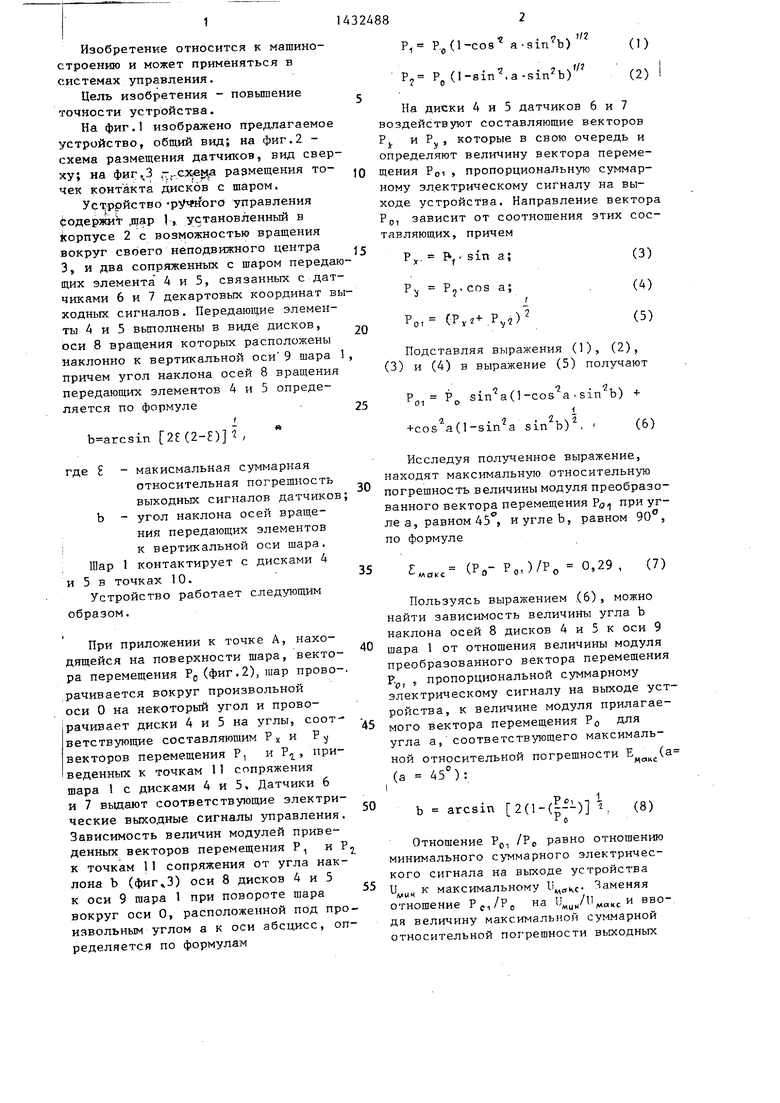
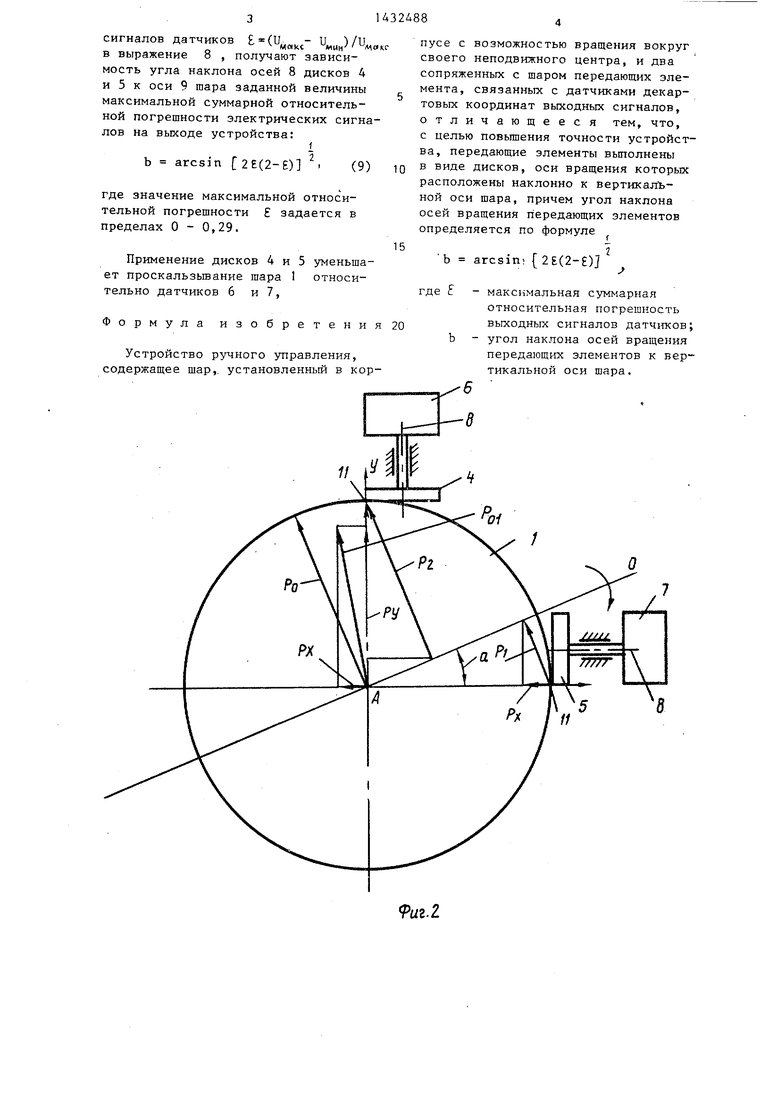
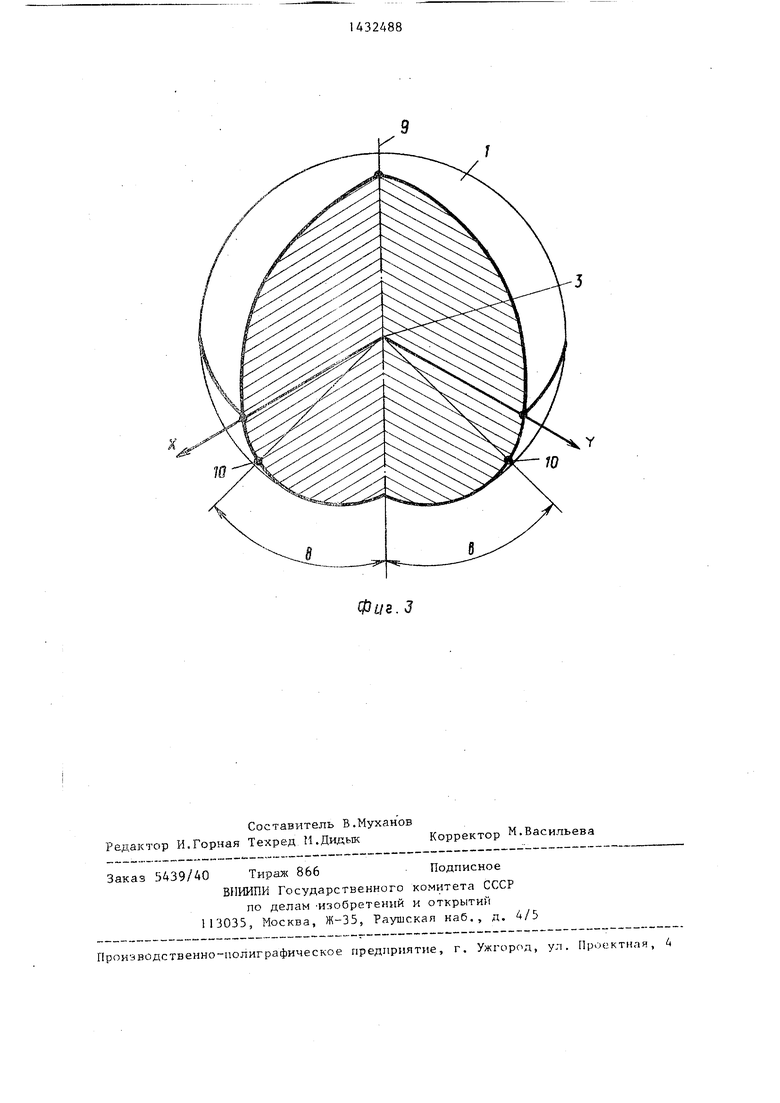
На фиг.1 изображено предлагаемое устройство, общий вид; на фиг.2 - схема размещения датчшсов, вид сверху; на фиГ ,3 -,-схема размещения то- чек контакта дисков с шаром
Уст.ррйство управления Додержит дар , установленный в Корпусе 2 с возможностью вращения вокруг своего непс движного центра 3, и два сопряженных с шаром передающих элемента 4 и 5, связанных с датчиками 6 и 7 декартовых координат выходных сигналов. Передающие элементы 4 и 5 выполнены в виде дисков, оси 8 вращения которых расположены наклонно к вертикальной оси 9 шара 1 причем угол наклона осей 8 вращения передающих элементов 4 и 5 определяется по формуле,
(
b arcsin 2(2-Е) ;
На диски 4 и 5 датчиков 6 и 7 воздействуют составляющие векторов Р, и Р, , которые в свою очередь и определяют величину вектора перемещения POI , пропорциональную суммарному электрическому сигналу на выходе устройства. Направление вектора РО, зависит от соотношения этих составляющих, причем
Р . S in а; P;j Pj. COS a;
PO, (.PV)
(3)
(4) (5)
Подставляя выражения (1), (2), (3) и (4) в выражение (5) получают
PQ, Рр ( . sin b) +
+COS a(l-sin a sin b),
(6)
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления курсором для использования с системой отображения | 1990 |
|
SU1709520A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КРЕНА ВРАЩАЮЩЕГОСЯ ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2527369C1 |
| Оптическая система формирования и наведения лазерного пучка | 2019 |
|
RU2715083C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ | 2013 |
|
RU2529649C1 |
| Устройство для автоматической поверки стрелочных приборов | 1991 |
|
SU1800262A1 |
| СПОСОБ АВТОКОМПЕНСАЦИИ НЕЗАВИСЯЩИХ ОТ УСКОРЕНИЯ ДРЕЙФОВ ГИРОСКОПИЧЕСКОГО УСТРОЙСТВА | 2015 |
|
RU2603767C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И ФАЗЫ ДИСБАЛАНСА | 2006 |
|
RU2310178C1 |
| Устройство для обмотки длинномерного сердечника | 1988 |
|
SU1745658A1 |
| ПОЛЯРИЗАЦИОННО-ФАЗОВЫЙ СПОСОБ ИЗМЕРЕНИЯ УГЛА КРЕНА ПОДВИЖНОГО ОБЪЕКТА И РАДИОНАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2521435C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТРЕХМЕРНЫХ КООРДИНАТ | 1991 |
|
RU2015564C1 |
Изобретение относится к области машиностроения и может применяться в системах управления. Цель изобретения - повьппение точности устройства. Устройство ручного управления содержит шар 1, корпус 2, передающие элементы 4,5, датчики . Повышение точности обеспечивается тем, что передающие элементы 4,5 выполнены в виде дисков, оси которых расположены наклонно к вертикальной оси шара 1. 3 ил.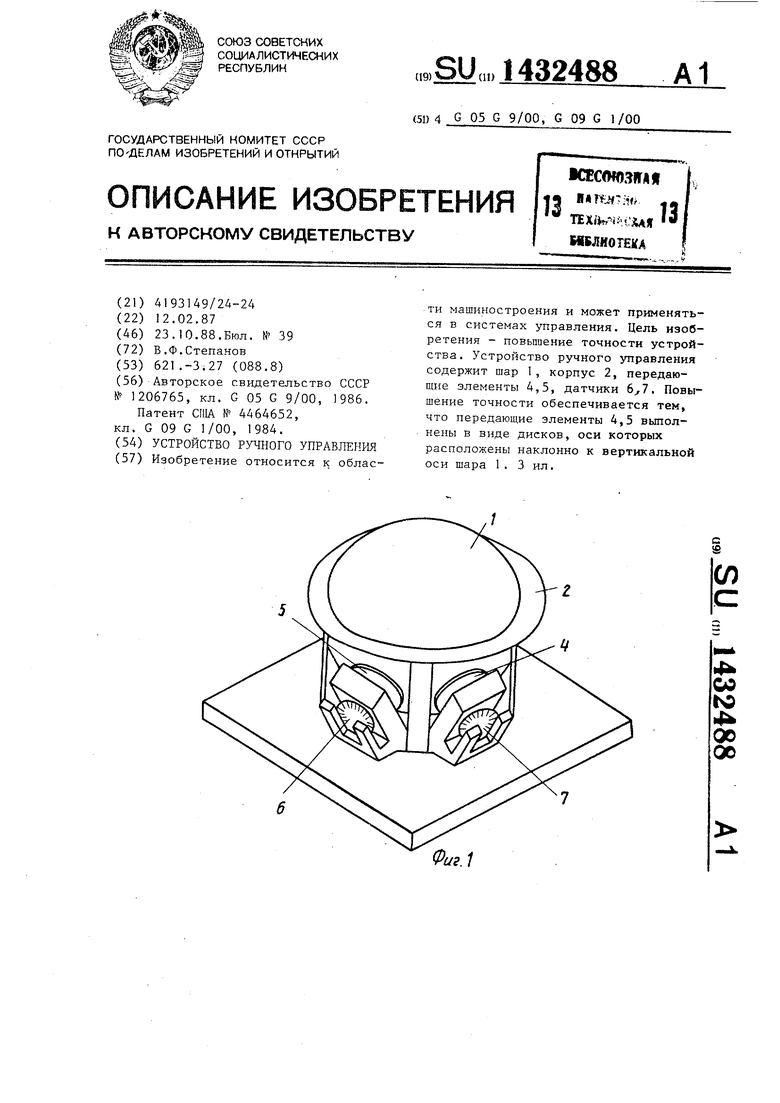
где - макисмальная суммарная
относительная погрешность вьшодных сигналов датчико b - угол наклона осей вращения передающих элементов : к вертикальной оси шара. Шар 1 контактирует с дисками 4 и 5 в точках 0.
Устройство работает следующим образом.
При приложении к точке А, нахо
дящейся на поверхности шара, вектора перемещения Р(фиг.2), шар проворачивается вокруг произвольной оси О на некоторый угол и проворачивает диски 4 и 5 на углы, соот- ветствующие составляющим Р к и Р v( векторов перемещения Р, и Р,, приведенных к точкам 1 сопряжения шара 1 с дисками 4 и 5. Датчики 6 и 7 вьщают соответствующие электрические выходные сигналы зт равления. Зависимость величин модулей приведенных векторов перемещения Р, к точкам 11 сопряжения от угла наклона Ъ () оси 8 дисков 4 и 5 к оси 9 щара 1 при повороте шара вокруг оси О, расположенной под про извольнь№1 углом а к оси абсцисс, определяется по формулам
0
5
0
.
0
Исследуя полученное выражение, находят максимальную относительную погрешность величины модуля преобразованного вектора перемещения Р,) при угле а, равном 45, и угле Ь, равном 90°, по формуле
мс,.с (РО- РО,)/РО 0.29, (7)
Пользуясь выражением .(6) , можно найти зависимость величины угла b наклона осей 8 дисков 4 и 5 к оси 9 шара 1 от отношения величины модуля преобразованного вектора перемещения Р.р, 5 пропорциональной суммарному электрическому сигналу на выходе устройства, к величине модуля прилагаемого вектора перемещения РО для угла а, соответствующего максимальной относительной погрешности Е {а
(а 45 ):
I
b arcsin 2(l-(-i) V (8)
0
Отношение Р, /Рр равно отношению минимального суммарного электрического сигнала на выходе устройства wuM максимальному . Заменяя отношение Р(,,/Рд на вводя величину максимальной суммарной относительной погрешности вькодных
мак
сигналов датчиков и,ун)/Ц в выражение 8 , получают зависимость угла наклона осей 8 дисков 4 и 5 к оси 9 тара заданной величины максимальной суммарной относительной погрешности электрических сигналов на выходе устройства:
b arcsin 2Е(2-)
где значение максимальной относительной погрешности Е задается в пределах О - 0,29.
Применение дисков 4 и 5 уменьшает проскальзьшание шара I относительно датчиков 6 и 7,
Формула изобретения 20
Устройство ручного управления, содержащее шар,, установленный в коркс10
пусе с возможностью вращения вокруг своего неподвижного центра, и два сопряженных с шаром передающих элемента, связанных с датчиками декартовых координат выходных сигналов, отличающееся тем, что, с целью повьтения точности устройства, передающие элементы выполнены в виде дисков, оси вращения которых расположены наклонно к вертикальной оси шара, причем угол наклона осей вращения передающих элементов определяется по формуле
15
Ь arcsin; { 2(2-Е)
Е - максимальная суммарная
относительная погрешность выходных сигналов датчиков; b - угол наклона осей вращения передающих элементов к вертикальной оси шара.
te.2
фуг. J
| Механизм перемещения курсора | 1983 |
|
SU1206765A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
