Описание изобретения
Назначение и область применения
Изобретение относится к области прецизионного приборостроения и может быть использовано при создании и эксплуатации навигационных систем на базе гироскопических устройств, например, гироскопов или датчиков угловых скоростей, в морской, воздушной, наземной, скважинной навигации, в том числе, предназначенных для исследования траекторий нефтяных, газовых, геотермальных, железорудных и других скважин.
Предшествующий уровень техники
Известны различные способы автокомпенсации не зависящих от ускорения дрейфов (корпусных дрейфов) гироскопического устройства (ГУ), обеспечивающие повышение его точности при использовании (см. книгу "Автокомпенсация инструментальных погрешностей гиросистем", авторы С.М.Зельдович и др. Изд. "Судостроение", 1976 г., УДК 531382, [1]).
Сущность любого способа автокомпенсации состоит в придании отдельным элементам и узлам гироскопического устройства дополнительных механических движений, позволяющих осуществить модуляцию уходов гироприборов и, в конечном итоге, превратить эти уходы из монотонных в периодические функции времени с ограниченной амплитудой. К этим способам, в частности, относятся: принудительное движение шарикоподшипниковых опор подвесов гироскопических устройств, например, гироскопов, принудительное вращение гироскопических чувствительных элементов, реверсирование векторов кинетических моментов гироскопов и т.д.
Однако собственное движение объекта вокруг оси, параллельной оси автокомпенсации, накладывается на вышесказанное принудительное движение гироскопического устройства (например, гироскопа), что приводит к снижению эффективности работы автокомпенсации, и, как следствие, к увеличению погрешности хранения заданного направления из-за того, что не происходит полной модуляции дрейфов.
Наиболее близким к заявленному решению по совокупности существенных признаков, выбранным в качестве прототипа, является способ автокомпенсации принудительным вращением карданова подвеса ГУ на основе гироскопа вокруг вектора кинетического момента, раскрытый в вышеупомянутой публикации [1, стр. 52]. В соответствии с решением, раскрытым в прототипе, способ автокомпенсации корпусных дрейфов, входящих в состав навигационной системы, установленной на объекте, ГУ, установленном вместе с триадой акселерометров на поворотной рамке, снабженной двигателем и датчиком угла, таким образом, что ось вращения рамки параллельна вектору кинетического момента ГУ, основан на принудительном вращении подвеса ГУ вокруг вектора кинетического момента. При этом при реализации указанного способа, основание, на котором закреплены подшипники наружного кольца подвеса ГУ на основе трехстепенного гироскопа, вращается при помощи двигателя, с постоянной угловой скоростью вокруг оси, параллельной исходной ориентации вектора кинетического момента гироскопа. Таким образом, корпус ГУ разворачивают в дискретные моменты времени вокруг оси, параллельной вектору кинетического момента ГУ, с помощью поворотной рамки, связанной с двигателем, с дискретной фиксацией положений.
Основной недостаток данного решения заключается в том, что в рамках его осуществления не учитывается движение объекта вокруг его центра масс, и, как следствие, при наличии такого движения не происходит полной модуляции корпусных дрейфов ГУ( гироскопа) вплоть до полного ее прекращения (явление резонанса). Как следствие, указанный способ не позволяет исключить полностью влияние корпусных дрейфов ГУ на погрешность хранения базового направления, где в качестве базовых направлений обычно принимаются направления на географический или магнитный север, но также могут служить направление вдоль дуги большого круга, соединяющего начальную и конечную точки маршрута, направление бомбометания от исходной точки до цели или произвольные горизонтальные направления, образующие навигационную систему координат, например, в полярных областях.
Сущность изобретения.
Техническая задача, решаемая настоящим изобретением, заключается в предложении способа автокомпенсации не зависящих от ускорения дрейфов (корпусных дрейфов) гироскопического устройства (ГУ), обеспечивающего модуляцию весовых коэффициентов, определяющих влияние этих дрейфов на погрешность хранения заданного направления, в процессе работы навигационной системы на подвижном объекте.
Технический результат, достигаемый заявленным изобретением, заключается в повышении точности навигационной системы за счет снижения влияния корпусных дрейфов ГУ на погрешность хранения базового направления, независимо от закона движения объекта
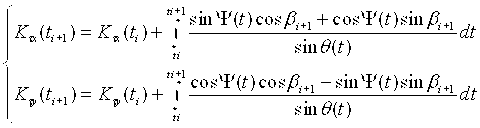
Заявленный технический результат достигается тем, что используют способ автокомпенсации корпусных дрейфов ГУ, установленного вместе с триадой акселерометров на поворотной рамке, снабженной двигателем и датчиком угла, таким образом, что ось вращения рамки параллельна вектору кинетического момента ГУ, заключающийся в том, что с помощью рамки, связанной с двигателем, корпус ГУ разворачивают в дискретные моменты времени вокруг оси, параллельной вектору кинетического момента ГУ, с дискретной фиксацией положений. При этом способ согласно изобретению отличается от прототипа тем, что используют автокомпенсацию с обратной связью, при которой программно-аппаратным образом осуществляют непрерывное отслеживание уровня подавления корпусных дрейфов, для оценки которого используют текущее значение расчетного интегрального параметра N, определяемого путем математической обработки выходных сигналов гироскопа, показаний датчика угла и акселерометров, а принудительный разворот рамки вокруг оси, параллельной оси кинетического момента на текущий расчетный поправочный угол поворота рамки 
где 

где 

а текущий поправочный угол поворота рамки 

где параметры К1 и К2:


при этом 





а Nmax= σAmax/ στ.
При этом длительность интервала времени между принудительными разворотами рамки вокруг оси, параллельной вектору кинетического момента на текущий поправочный угол поворота рамки


В одном из вариантов осуществления изобретения в качестве ГУ используют двухосный ДУС (датчик угловых скоростей), установленный на рамке так, чтобы ось его кинетического момента была параллельна оси вращения рамки.
В еще одном варианте изобретения, в качестве ГУ используют два одноосных ДУС, оси чувствительности каждого из которых ортогональны оси вращения рамки и друг другу.
Краткое описание чертежей
Для того чтобы лучше продемонстрировать отличительные особенности изобретения, в качестве примера, не имеющего какого-либо ограничительного характера, ниже описан один из вариантов осуществления, проиллюстрированный на:
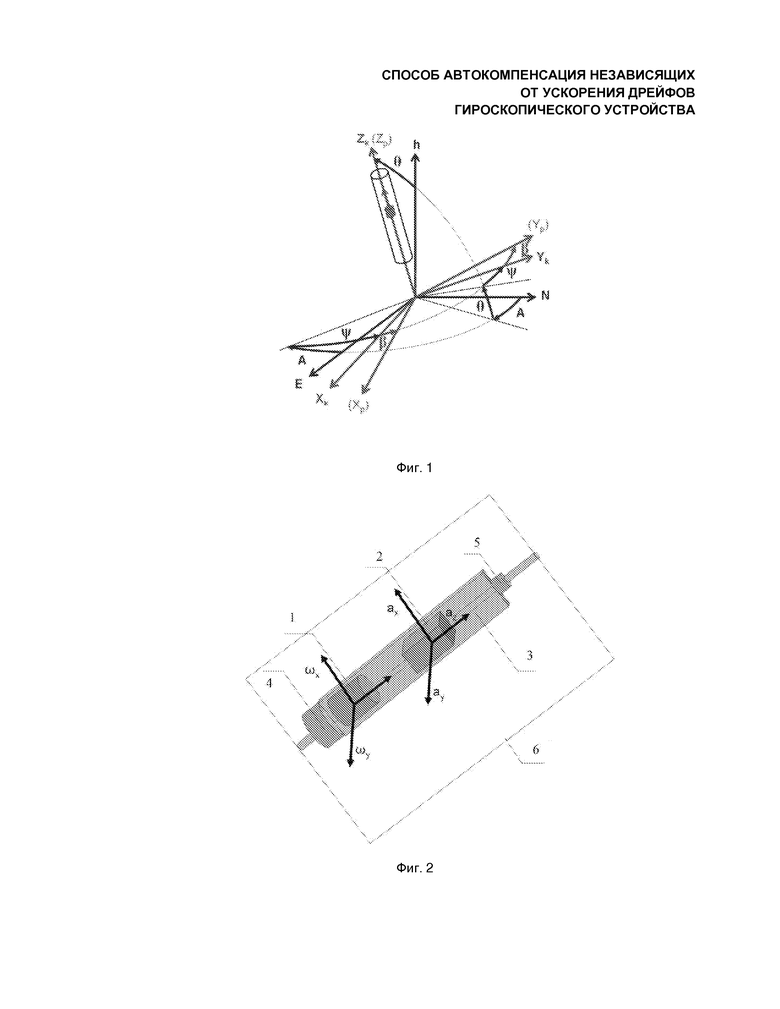
Фиг. 1 - система координат, где ENh - горизонтная система координат, XkYkZk - система координат, связанная с объектом, XpYpZp - система координат, связанная с рамкой;
Фиг. 2 - вариант осуществления ГУ на основе двухосного ДУС.
Следует отметить, что прилагаемые чертежи иллюстрируют только один из наиболее предпочтительных вариантов выполнения изобретения и не могут рассматриваться в качестве ограничений его содержания, которое включает другие варианты осуществления.
Осуществимость изобретения
В качестве примера осуществления решения согласно заявленному изобретения, рассмотрим способ автокомпенсации корпусных дрейфов ГУ на примере гироскопического инклинометра на основе двухосного ДУС, используемого в качестве ГУ. При этом в рассматриваемом примере осуществления гироскопический инклинометр рассматривается в качестве объекта, на который установлен ДУС (см. фиг.2). В данной схеме осуществления изобретения, представленной на фиг.2, акселерометры 2 и ДУС 1 расположены на вращающейся рамке 3. Рамка 3 имеет возможность устанавливаться в дискретные положения относительно продольной оси гироскопического инклинометра 6 с помощью двигателя 4. Для измерения угла поворота на оси рамки размещен датчик 5 угла (ДУ), например, оптический. ДУС 1 установлен так, чтобы оси чувствительности были перпендикулярны оси вращения рамки 3. В состав как рассматриваемого ГУ, так и ГУ в любом ином исполнении, как правило, также входят блок сервисных электронных устройств и блок обработки информации, включающий, по меньшей мере, вычислитель, реализованный на базе микропроцессора (на фиг.2 не показаны), связанные по линиям связи, например телеметрической связи, с внешним или встроенным пультом управления и компьютерным устройством (на чертежах не показаны).
Блок сервисных электронных устройств, как правило, включает, по меньшей мере блок питания, блок управления, усилители и аналого-цифровые преобразователи сигналов с чувствительных элементов ГУ, акселерометров и датчика угла, текущие данных которых непрерывно передаются в блок обработки информации(вычислитель) для их последующей обработки программно-аппаратным образом и выработки управляющих сигналов на соответствующие элементу ГУ для коррекции их положения. При наличии внешних пульта управления и компьютерного устройства текущие данные от чувствительных элементов ГУ, акселерометров и датчика угла могут передаваться по каналам телеметрической связи и/или любой иной проводной или беспроводной связи, известной в данной области техники, в соответствующие им блоки обработки информации для ее преобразования, обработки по предустановленным алгоритмам и выработки управляющих сигналов и команд на ГУ, в зависимости от решаемых задач.
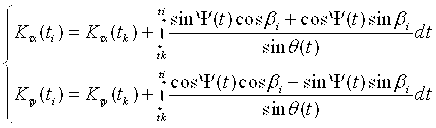
Согласно изобретению, при осуществлении способа автокомпенсации не зависящего от дрейфа корпуса гироскопического устройства, в качестве погрешности хранения базового направления принимают погрешность азимута ∆А, вызванную корпусными дрейфами ГУ (в примере осуществления - ДУС). Обозначив дрейфы ГУ 


Учитывая, что скорости изменения уходов(дрейфов) τx,
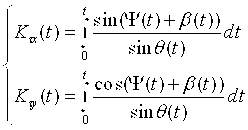
τy представляют собой медленно меняющиеся функции времени по сравнению с другими сомножителями выражения (1), они могут быть вынесены за знаки интегралов, а оставшиеся интегральные выражения обозначены как весовые коэффициенты

При этом, принимая во внимание, что закон изменения углов ориентации




Как было указано ранее, технической результат, достигаемый заявленным изобретением, заключается в повышении точности навигационной системы ГУ за счет модуляции весовых коэффициентов, определяющих степень влияния корпусных дрейфов ГУ на погрешность хранения базового направления, независимо от движения объекта.
В заявленном изобретении, автокомпенсация корпусных дрейфов ГУ обеспечивается за счет проведения разворотов ГУ в дискретные моменты времени вокруг вектора кинетического момента. При этом значение угла, в который при помощи двигателя и датчика угла выполняется разворот рамки ГУ, определяют на основании текущих значений углов ориентации объекта, входящих в выражение погрешности азимута (1).
Анализ зависимости (1) показывает, что для уменьшения погрешности азимута ∆А необходимо уменьшать значения каждого из весовых коэффициентов
Таким образом, управляя углом
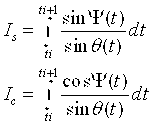
Для суммарной оценки вклада весовых коэффициентов
Выражение (3) для интегрального расчетного параметра N получено на основании известного в уроне техники предположения, что неопределенности дрейфов


Следовательно, для ограничения величины СКО погрешности хранения базового направления достаточно ограничить значение интегрального параметра N выбранным пороговым значением

Соответственно, пороговое значение расчетного интегрального параметра


В общем случае, пороговое значение
Таким образом, если в момент времени 





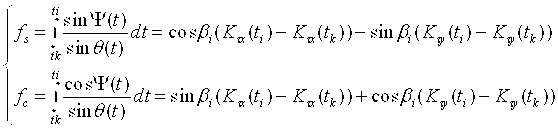
Введя следующие обозначения:
Приравняв нулю весовые коэффициенты на момент времени

Решение системы уравнений относительно 

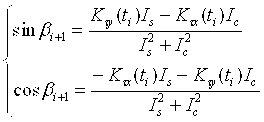
При этом выполнение следующего условия для указанного в делителе выражения:

обеспечивает минимальное время, за которое весовые коэффициенты 

Поскольку, при 







Введя следующие обозначения:
и определив условия для выполнения нормировки следующим образом:
где 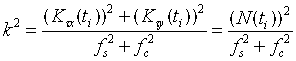
при последующей подстановке (10) в (7) получим следующие выражения для тригонометрических функций угла
где параметры K1 и К2 определяют из следующих соотношений:

Таким образом, полученная зависимость для расчета угла
Осуществление способа происходит следующим образом.
Если выполняется условие N < Nmax , то ГУ относительно корпуса объекта неподвижен. При N ≥ Nmax из уравнений (12) вычисляется значение угла, в который необходимо установить ГУ относительно корпуса объекта. После выполнения этой операции ГУ разворачивается в это положение вокруг оси параллельной оси кинетического момента. Поскольку независимо от положения рамки, вычисление N продолжается, можно наблюдать уменьшение этого параметра со временем (до 0 в данном случае), а затем - его рост. При достижении условия 
Необходимо отметить, что все вычисления осуществляются на основании объективно получаемых измерений датчика угла, акселерометров и ГУ, которые передаются в режиме реального времени на наземный пульт управления и обрабатываются персональным компьютером или аналогичными устройствами, связанным с наземным пультом управления с выработкой на основании вычислений и передачей управляющих сигналов на гироскопическое устройство. Аналогичным образом указанные операции могут осуществляться и при реализации встроенного в ГУ блока обработки информации, пульта управления и вычислителя, на базе микропроцессорных устройств. При любом из вариантов осуществляется систем или модулей управления и обработки текущей информации способ автокомпенсации независимых от ускорений дрейфов гироскопического устройства, согласно заявленному изобретению, могут осуществляться программно-аппаратным образом автоматически.
Рассмотренный выше пример осуществления, как было указано раньше, относился к продольной компоновке гироскопического инклинометра, однако, очевидно, что реализованный в настоящем изобретении способ автокомпенсации может быть применен при реализации любых других гироскопических приборах, т.к. в данном случае, основным объектом наблюдения является собственно гироскоп и возможность управления разворотом рамки для компенсации корпусных дрейфов гироскопа.
Без потери качества способа автокомпенсации согласно изобретению, в качестве ГУ может быть использован:
- один двухосный ДУС, установленный так, чтобы ось его кинетического момента была параллельна оси вращения рамки.
При использовании двухосного ДУС в качестве ГУ, ДУС измеряет две проекции угловой скорости. Значения угловых скоростей будут содержать погрешности, в том числе, корпусные дрейфы, к которым справедлив способ автокомпенсации, все вышеуказанные выводы остаются справедливыми и для данного варианта осуществления изобретения.
- два одноосных ДУС, оси чувствительности которых ортогональны друг другу и оси вращения рамки.
При использовании двух одноосных ДУС в качестве ГУ, измеряют две проекции угловой скорости, при этом значения угловых скоростей будут содержать погрешности, в том числе, корпусные дрейфы, к которым справедлив способ автокомпенсации, раскрытый выше в описании и соответствующий заявленному изобретению.
Таким образом, заявленный способ автокомпенсации независящих от ускорения дрейфов ГУ позволят существенно повысить точность навигационной системы ГУ за счет модуляции весовых коэффициентов, определяющих степень влияния корпусных дрейфов ГУ на погрешность хранения базового направления, независимо от движения объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2169903C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОЕКЦИЙ ГОРИЗОНТАЛЬНОЙ СОСТАВЛЯЮЩЕЙ ВЕКТОРА УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ЗЕМЛИ ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОГО НАПРАВЛЕНИЯ (КОМПАСИРОВАНИЯ) | 2005 |
|
RU2300078C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА С ПОМОЩЬЮ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1995 |
|
RU2098766C1 |
| ГИРОГОРИЗОНТКОМПАС | 2015 |
|
RU2601240C1 |
| ГИРОИНКЛИНОМЕТР ДЛЯ ПРОВЕДЕНИЯ ИНКЛИНОМЕТРИЧЕСКОЙ СЪЕМКИ И СПОСОБ ЕЁ ПРОВЕДЕНИЯ | 2024 |
|
RU2829726C1 |
| ГИРОГОРИЗОНТКОМПАС | 2014 |
|
RU2550592C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| ГИРОГОРИЗОНТКОМПАС | 2016 |
|
RU2617136C1 |
| ГИРОГОРИЗОНТКОМПАС | 2015 |
|
RU2610022C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
Изобретение относится к области прецизионного приборостроения и может быть использовано при создании и эксплуатации навигационных систем на базе гироскопических устройств (ГУ). Способ автокомпенсации не зависящих от ускорения дрейфов гироскопического устройства, для оценки которого используют текущее значение расчетного интегрального параметра N, определяемого путем математической обработки выходных сигналов гироскопа, показаний датчика угла и акселерометров. При этом принудительный разворот рамки вокруг оси, параллельной оси кинетического момента на текущий расчетный поправочный угол поворота рамки, осуществляют при достижении или превышении текущим значением расчетного интегрального параметра N предустановленного порога, определяемого как отношение среднеквадратичного отклонения (СКО) максимальной допустимой погрешности хранения направления, вызванной корпусными дрейфами, к СКО неопределенности этих дрейфов. Технический результат - повышение точности навигационной системы за счет снижения влияния корпусных дрейфов ГУ на погрешность хранения базового направления, независимо от закона движения объекта. 3 з.п. ф-лы, 2 ил.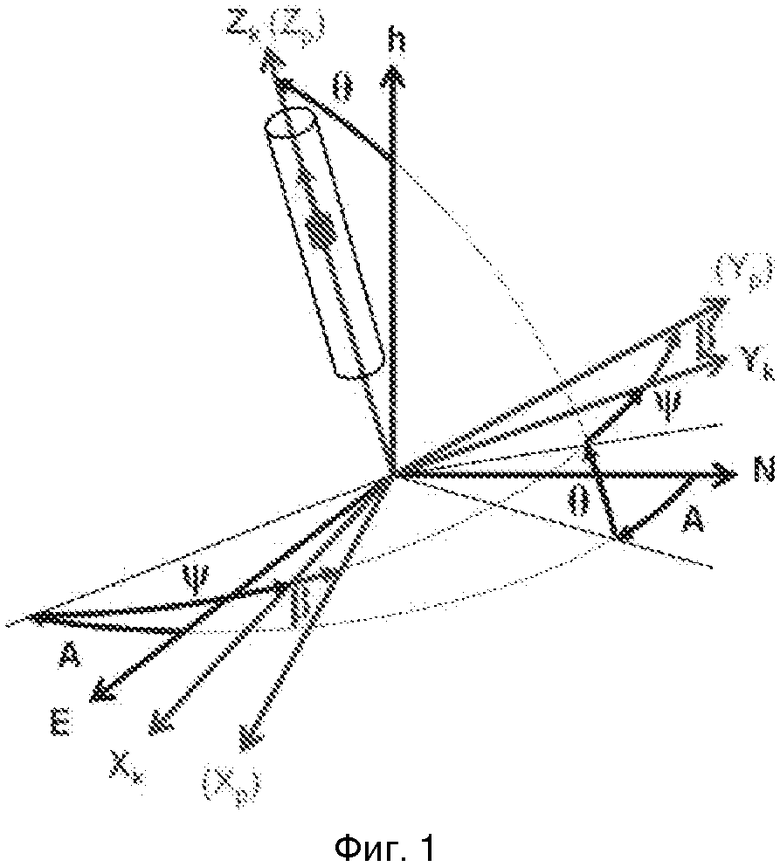
Способ автокомпенсации корпусных дрейфов гироскопического устройства (ГУ), установленного вместе с триадой акселерометров на поворотной рамке, снабженной двигателем и датчиком угла, таким образом, что ось вращения рамки параллельна вектору кинетического момента ГУ, заключающийся в том, что с помощью рамки, связанной с двигателем, корпус ГУ разворачивают в дискретные моменты времени вокруг оси, параллельной вектору кинетического момента ГУ, с дискретной фиксацией положений, отличающийся тем, что используют автокомпенсацию с обратной связью, при которой программно-аппаратным образом осуществляют непрерывное отслеживание уровня подавления корпусных дрейфов, для оценки которого используют текущее значение расчетного интегрального параметра N, определяемого путем математической обработки выходных сигналов гироскопа, показаний датчика угла и акселерометров, а принудительный разворот рамки вокруг оси параллельной оси кинетического момента на текущий расчетный поправочный угол поворота рамки
где
где
а текущий поправочный угол поворота рамки
где параметры К1 и К2:
при этом
а Nmax= σAmax/ στ.
2. Способ по п. 1, отличающийся тем, что длительность интервала времени между принудительными разворотами рамки ГУ вокруг оси параллельной вектору кинетического момента на текущий поправочный угол поворота рамки
3. Способ по любому из пп. 1 и 2, отличающийся тем, что в качестве ГУ используют один двухосный ДУС, установленный так, чтобы ось его кинетического момента была параллельна оси вращения рамки.
4. Способ по любому из пп. 1 и 2, отличающийся тем, что в качестве ГУ используют два одноосных ДУС, оси чувствительности каждого из которых ортогональны оси вращения рамки и друг другу.
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550298C1 |
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 1999 |
|
RU2156959C1 |
| ГИРОКОМПАСНАЯ СИСТЕМА ОРИЕНТАЦИИ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2012 |
|
RU2498216C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ ПРИ НЕТОЧНОЙ ВЫСТАВКЕ ГИРОСКОПА НА ОБЪЕКТЕ | 2004 |
|
RU2267748C1 |

