4
со со
со
Изобретение относится к области робототехники и может быть использовано, например, для создания устройства управления роботами-окрасчиками.
Целью изобретения является расширение технологических возможностей и повышение надежности работы устройства для управления промышленным роботом за счет распознавания большей номенклатуры изделий.
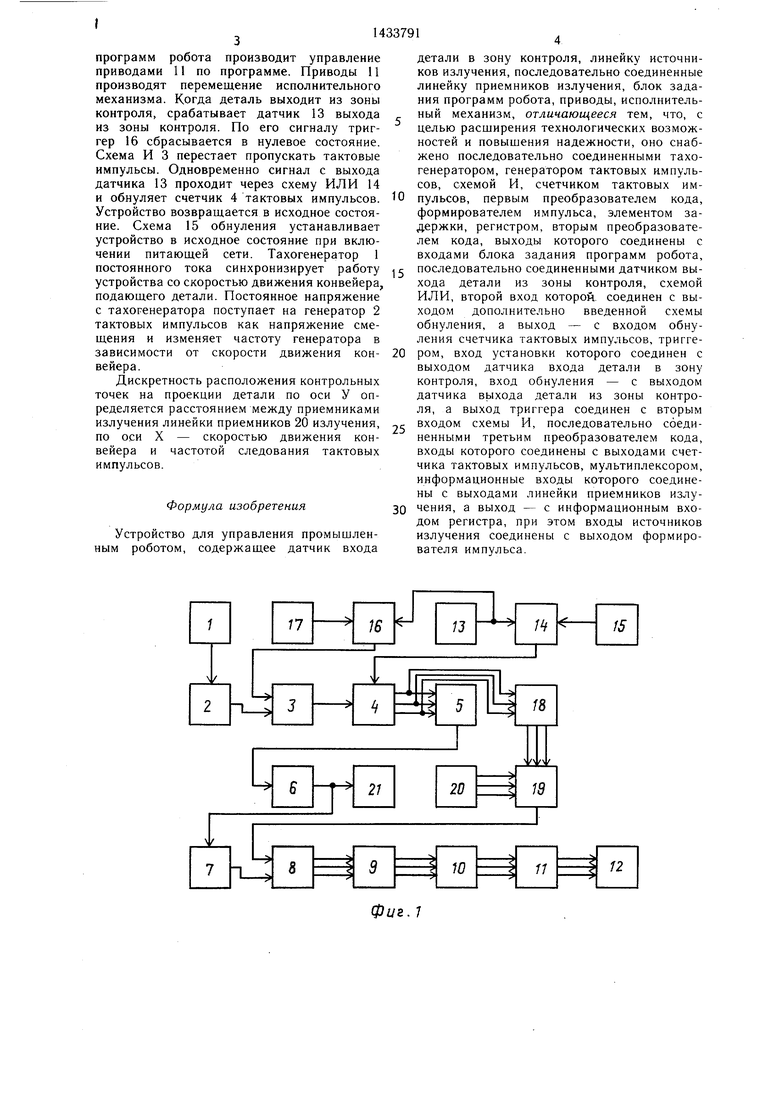
На фиг. 1 изображена структурная схема 10 тупает на второй вход схемы И 3. Схе- устройства для управления промышленнымма И 3 начинает пропускать импульсы с
генератора 2 тактовых импульсов на вход счетчика 4 тактовых импульсов. С выхода счетчика 4 тактовых импульсов сигнал в виде параллельного двоичного кода поступает на вход первого преобразователя 5 Устройство содержит последовательно соединенные тахогенератор 1, генератор 2 тактовых импульсов, схему И 3, счетчик 4
роботом; на фиг. 2 - пример выбора точек контроля; на фиг. 3 - пояснение принципа работы устройства и выбора частоты генератора тактовых импульсов.
тактовых импульсов, первый преобразовакода. На его выходе сигнал появляется только тогда, когда какая-либо из контрольных точек на вертикальной проекции деталей находится между линейкой
тель 5 кода, формирователь 6 импульса, 20 излучателей и линейкой 20 приемников элемент 7 задержки, регистр 8, второйизлучения. Потенциальный сигнал на выпреобразователь 9 кода, блок 10 заданияходе первого преобразователя 5 кода
программ робота, приводы 11, исполнитель-преобразуется формирователем импульса в
ный механизм 12, последовательно соеди-единичный импульс и поступает на вход
ненные датчик 13 выхода детали из зо-линейки 2 излучателей, которая формирует
ны контроля, схему ИЛИ 14, второй импульс излучения. Информация с выхо- вход которой соединен с выходом схемыдов счетчика 4 тактовых импульсов пос15 обнуления, а выход - с входомтупает одновременно и на вход третьего
I обнуления счетчика 4 тактовых импульсов,преобразователя 18 кода. С выходов
триггер 16, вход установки которого соеди-преобразователя 18 кода информация поступает на управляющие входы мультиплексора 19; выборка входов мультиплексора 19 происходит таким образом, что в момент излучения линейки 21 излучателей на выход мультиплексора проходит сигнал только с одного из приемников излучения, соотсор 19, входы преобразователя 18 соедине- .35 ветствуюший информации, получаемой в дан- I ны с выходами счетчика 4 тактовых импуль-ной контрольной точке. С выхода мультиI сов, информационные входы мультиплексораплексора сигнал поступает на информа 19 соединены с выходами линейки 20ционный вход регистра 8 в виде посI приемников излучения, а выход - с ий-ледовательного двоичного кода. Запись инj формационным входом регистра 8, входформации в регистр осуществляется по сиглинейки 21 излучателей соединен с выходом 40 налу с формирователя 6 импульса, про- формирователя 6 импульса.шедшему через элемент 7 задержки на вход
синхронизации регистра. Время задержки выбирается таким, что сигнал на вход синхронизации регистра поступает тогда, когда
I нен с датчиком 17 входа детали в зону ; контроля, вход обнуления - с выходом j датчика 13 выхода детали из зоны контроля, а выход соединен с вторым входом схемы И 3, последовательно соединенные третий преобразователь 18 кода, мультиплек30
квадрата, треугольника, прямоугольника и круга, соответственно наложены друг на друга. Детали 25-28 подвешены на сцепах 29, закрепленных на подвесном контейнеНа фиг. 2 показан пример выбора по- -ложения датчиков 22-24, линейки . 20. Датчики для наглядности разнесены в прост- ., на информационном вход€ регистра уже ранстве, а детали 25-28, имеющие формусформировался сигнал с приемника излучения, прошедший через мультиплексор 19. Таким образом, в регистр В по мере прохождения детали между линейкой 21 излучателей и линейкой 20 приемников из- ре 30. На каждом сцепе 29 закреплен JQ лучения последовательно записывается ин- металлический уголок 31. На стойке 32формация со всех контрольных точек. С
линейки 21 излучателей закреплены дат-выхода регистра информация в виде пачик 17 входа детали в зону контроляраллельного двоичного кода поступает на
и датчик 13 выхода детали из зонывходы второго преобразователя 9 кода,
контроля (датчики могут быть реализованы,где преобразуется в код, необходимый для
например, на основе индуктивных датчи- 55 включения соответствующей программы ок- ков). Линейка 20 приемников излученияраски, и поступает в блок 10 задания
закреплена на стойке 33. Линейка обра-программ робота, где происходит выборка
зована датчиками 22-24. .программы окраски детали. Блок 10 задания
Устройство работает следуюш.им образом.
Деталь перемещается подвесным тол- каюш,им конвейером и попадает в зону контроля между линейкой 21 излучателей и линейкой 20 приемников излучения. В этот момент срабатывает датчик 17 входа детали в зону контроля. Сигнал с датчика поступает на установочный вход триггера 16 и переключает его в единичное состояние. Сигнал с триггера 16 поступает на второй вход схемы И 3. Схе- ма И 3 начинает пропускать импульсы с
детали в зону контроля, линейку источников излучения, последовательно соединенные линейку приемников излучения, блок задания программ робота, приводы, исполнительный механизм, отличающееся тем, что, с целью расширения технологических возможностей и повышения надежности, оно снабжено последовательно соединенными тахо- генератором, генератором тактовых импульсов, схемой И, счетчиком тактовых импрограмм робота производит управление приводами 11 по программе. Приводы 11 производят перемещение исполнительного механизма. Когда деталь выходит из зоны контроля, срабатывает датчик 13 выхода из зоны контроля. По его сигналу триггер 16 сбрасывается в нулевое состояние. Схема И 3 перестает пропускать тактовые импульсы. Одновременно сигнал с выхода датчика 13 проходит через схему ИЛИ 14 и обнуляет счетчик 4 тактовых импульсов. Ю пульсов, первым преобразователем кода. Устройство возвращается в исходное состоя-формирователем импульса, элементом зание. Схема 15 обнуления устанавливаетдержки, регистром, вторым преобразоватеустройство в исходное состояние при вклю-лем кода, выходы которого соединены с
чении питающей сети. Тахогенератор 1входами блока задания программ робота,
постоянного тока синхронизирует работу чг последовательно соединенными датчиком вы- устройства со скоростью движения конвейера, хода детали из зоны контроля, схемой подающего детали. Постоянное напряжениеИЛИ, второй вход которой соединен с выс тахогенератора поступает на генератор 2ходом дополнительно введенной схемы
тактовых импульсов как напряжение сме-обнуления, а выход - с входом обнущения и изменяет частоту генератора вления счетчика тактовых импульсов, триггезависимости от скорости движения кон- 20 ром, вход установки которого соединен с вейера.выходом датчика входа детали в зону
Дискретность расположения контрольныхконтроля, вход обнуления - с выходом
точек на проекции детали по оси У оп-датчика вь1хода детали из зоны контроределяется расстоянием между приемникамиля, а выход триггера соединен с вторым
излучения линейки приемников 20 излучения, .,с входом схемы И, последовательно соедипо оси X - скоростью движения конвейера и частотой следования тактовых импульсов.
Формула изобретения
Устройство для управления промышленным роботом, содержащее датчик входа
ненными третьим преобразователем кода, входы которого соединены с выходами счетчика тактовых импульсов, мультиплексором, информационные входы которого соединены с выходами линейки приемников излу- 30 чения, а выход - с информационным входом регистра, при этом входы источников излучения соединены с выходом формирователя импульса.
детали в зону контроля, линейку источников излучения, последовательно соединенные линейку приемников излучения, блок задания программ робота, приводы, исполнительный механизм, отличающееся тем, что, с целью расширения технологических возможностей и повышения надежности, оно снабжено последовательно соединенными тахо- генератором, генератором тактовых импульсов, схемой И, счетчиком тактовых импульсов, первым преобразователем кода. формирователем импульса, элементом заненными третьим преобразователем кода, входы которого соединены с выходами счетчика тактовых импульсов, мультиплексором, информационные входы которого соединены с выходами линейки приемников излу- чения, а выход - с информационным входом регистра, при этом входы источников излучения соединены с выходом формирователя импульса.
22
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ УРОВНЯ СЫПУЧИХ МАТЕРИАЛОВ | 1998 |
|
RU2138027C1 |
| СИСТЕМА ЦИФРОВОГО СТЕРЕОФОНИЧЕСКОГО РАДИОВЕЩАНИЯ | 1991 |
|
RU2019041C1 |
| Преобразователь углового положения объекта | 1990 |
|
SU1795545A1 |
| Акселерометр | 1983 |
|
SU1126879A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ МАШИН И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2664033C1 |
| Устройство автоматического адресования деталей | 1985 |
|
SU1466814A1 |
| СПОСОБ КОНТРОЛЯ НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ В БЛОЧНЫХ СТРУКТУРАХ ГЕОСФЕРЫ, БАЗОВАЯ ОПОРА, ДЕФОРМОМЕТР И РЕГИСТРАТОР | 1995 |
|
RU2097558C1 |
| ЦИФРОВАЯ СИСТЕМА РАДИОВЕЩАНИЯ | 1992 |
|
RU2048704C1 |
| Устройство для измерения площади непрозрачных плоских фигур | 1985 |
|
SU1252671A1 |
| ЦИФРОВАЯ СИСТЕМА ТЕЛЕВИДЕНИЯ | 1996 |
|
RU2128890C1 |

Изобретение относится к робототехнике и может быть использовано, например, для создания устройств управления роботами-окрасчиками. Целью изобретения является расширение технологических возможностей и повышение надежности устройства. Устройство содержит линейки приемников и источников излучения, мультиплексор, три преобразователя кодов, формирователь импульсов, тахогенератор, генератор тактовых импульсов, схему И, счетчик, мультиплексор, триггер, датчики входа и выхода детали из зоны контроля, линию задержки, регистр, схему ИЛИ, схему облучения, блок задания программ робота. Распознавание детали, перемещаемой с помощью конвейера, производится в зоне контроля между линейками излучателей и приемников излучения. Сигнал с приемников излучения, соответствующий контрольным точкам, записывается в регистр, откуда поступает во второй преобразователь кодов, где вырабатывается код, необходимый для включения соответствующей программы окраски. Этот код поступает в блок задания программ, который через приводы управляет исполнительными механизмами. Применение устройства позволяет осуществлять обработку информации с помощью простого вычислителя без использования ЭВМ. 3 Ил. о ел
27
31 29 JO I /
иг.З
-28 25
23
иг.2
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Веникодробильный станок | 1921 |
|
SU53A1 |
