Изобретение относится к области навигации и управления дорожно-строительными машинами, преимущественно, машинами дорожной разметки, и может быть использовано в других областях хозяйственной деятельности, например, при обработке сельхозугодий.
Автоматизация процесса нанесения горизонтальной дорожной разметки на современном этапе развития дорожной техники сводится преимущественно к автоматическому управлению системой ее нанесения, соплом или матрицей из многих сопел. Практически не рассматривается проблема полной автоматизации процесса вождения самой разметочной машины, которая по-прежнему управляется водителем-оператором [1].
Используемый до сих пор способ нанесения линий дорожной разметки, включает в себя этапы нанесения предварительной и окончательной разметки и, в совокупности включает в себя следующие действия [2]:
- с помощью рулетки или курвиметра определяют контрольные точки осевой линии с шагом от 15 до 300 метров, в зависимости от кривизны обрабатываемого участка трассы, и фиксируют их меловыми засечками;
- укладывают шнур по контрольным засечкам и наносят краской линии или точки предварительной разметки осевой линии;
- с отслеживанием предварительно размеченной осевой линии с помощью разметочной машины с установленным на ней телескопическим кронштейном с маркером наносят параллельные краевые и рядные линии продольной дорожной разметки;
- с помощью разметочной машины, оснащенной визирным устройством, наносят окончательные линии продольной дорожной разметки, управляя по ходу движения так ее рулевым механизмом, чтобы минимизировать рассогласование положения маркера с предварительной линией разметки.
Перед разметкой дорожное полотно очищают от наносной грязи, песка и другого мусора, а также следов старой дорожной разметки.
При таком способе практически все операции выполняются вручную с полным или частичным перекрытием трассы дорожной техникой и привлечением большого количества персонала, и, как следствие, с большими расходами, с длительным сокращением пропускной способности автомобильных магистралей и серьезным снижением безопасности дорожного движения. Водителю разметочной машины приходится постоянно следить за положением часто плохо видимого направляющего ролика (или другого визирного устройства) относительно ранее заданной траектории. При этом на него действует ряд негативных факторов: усталость, отвлечение внимания на контроль работы агрегатов и самой машины, ограниченное быстродействие и др. Все это ведет к отклонениям движения машины от заданной траектории и, как следствие, к ухудшению качества дорожной разметки [3].
Известен «Способ определения положения транспортного средства относительно пунктирной линии дорожной разметки» (патент RU 2530476 С2 от 10.01.2013, МПК: G01C 21/26, B60W 30/12, опубл. 10.10.2014), предполагающий использование двух разнесенных цифровых фотокамер с параллельными оптическими осями, связанными с вычислителем.
Вычислитель получает оцифрованные изображения дорожного ландшафта по ходу движения транспортного средства и с его помощью выполняют следующую совокупность действий:
- выбирают в поле изображения, например с помощью метода оконтуривания [4], две идентичные точки в одноименных вершинах пунктирной линии дорожной разметки, ближайшие к транспортному средству, а также одну оптически контрастную точку, не лежащую на пунктирной линии дорожной разметки;
- определяют координаты этих точек на фотоматрицах;
- с учетом известных фокусных расстояний объективов фотокамер, а также высоты размещения фотокамер над дорожным покрытием и расстояния между ними, вычисляют координаты этих точек в системе координат, связанной с транспортным средством;
- с использованием возможностей аналитической геометрии вычисляют боковое отклонение транспортного средства от пунктирной линии дорожной разметки;
- с использованием возможностей аналитической геометрии вычисляют угол отклонения продольной оси транспортного средства от пунктирной линии дорожной разметки.
Для автоматизации вождения машин дорожной разметки данный способ не применим, поскольку перед разметкой дорожное полотно очищают от следов предшествующей разметки, что исключает возможность надежного автоматического нахождения идентичных точек на парных фотографиях дорожного полотна. Кроме того данный способ сложен, предусматривает выполнение большого количества мультипликативных и тригонометрических операций, что снижает точность определения искомых параметров и требует использования дорогого высокоточного фотографического и вычислительного оборудования.
Известен «Способ управления групповым вождением машин» (Патент RU 2172085 С2 от 12.11.1999, МПК7 А01В 69/04, G05D 1/02, опубл. 20.08.2001). Указанный способ заключается в том, что ведущая машина (например, скрепер) излучает сигнал, а ведомая (например, трактор-толкач) принимает сигнал, ведущая машина излучает постоянный визуальный сигнал о скорости и переменный визуальный и звуковой сигнал о положении ведомой машины относительно линии симметрии ведущей машины через соответствующие элементы индикации, которые располагают на задней стенке ковша ведущей машины, при этом ведомая машина по визуальному сигналу о скорости ведущей машины изменяет свою скорость, а по переменному визуальному и звуковому сигналу ведущей машины ориентирует свое движение в направлении перпендикулярном основному движению ведущей машины, причем ведущая машина переменный визуальный и звуковой сигналы формирует путем логической обработки сигналов с датчиков соприкосновения, которые располагают в теле его буфера, от момента начального соприкосновения ведомой машины с буфером ведущей машины до их полного соприкосновения. Постоянный визуальный сигнал о скорости ведущей машины формируют путем заполнения нечетных промежутков между импульсами, снимаемыми с датчика оборотов тросика спидометра, импульсами высокой частоты, подсчета их количества и преобразования в значение скорости, запоминания и отображения на соответствующих индикаторах. Логическую обработку сигналов с датчиков соприкосновения осуществляют путем оценки наличия сигналов от каждой группы рядом стоящих датчиков соприкосновения и включения соответствующего индикатора на пульсирующее мигание, а при наличии сигналов от всех групп датчиков соприкосновения переводят индикаторы на постоянное свечение и формируют прерывистый звуковой сигнал на заданное время, после истечения которого звуковой сигнал снимают.
Этот способ не решает задачу автоматизации группового вождения (фронтом) машин дорожной разметки, а лишь облегчает ручное наведение ведомой машины с целью ее временной стыковки с ведущей машиной. К тому же этот способ применим лишь на прямолинейных участках дорог.
Наиболее близким к предлагаемому способу является «Способ ориентирования и устройство для ориентирования дорожных машин» (Патент RU 2100521 от 12.04.1995, МПК7: E01C 23/18, E01C 23/16, опубл. 27.12.1997). По этому способу перед работой разметочную машину устанавливают в исходное положение так, чтобы ее рабочий орган был совмещен с началом будущей линии разметки, а продольная ось машины была параллельна этой линии. В процессе разметки ориентирование машины осуществляют по световому пятну, создаваемому лазерным излучателем, установленном на крыше разметочной машины. Для этого ось излучателя перед началом работы располагают в одной вертикальной плоскости с теоретической траекторией движения рабочего органа машины, а световой поток излучателя направляют на мишень, ось которой также располагают в упомянутой вертикальной плоскости. Причем разметочной машиной управляют таким образом, чтобы отклонения светового пятна от оси мишени были минимальными. При приближении разметочной машины к мишени ее перемещают далее вдоль теоретической траектории линии разметки. Чтобы снизить утомляемость водителя, мишень поворачивают в вертикальной или горизонтальной плоскости, увеличивая угол падения светового потока и уменьшая количества отраженного света, воспринимаемого глазом водителя. Тот же результат может обеспечить сам водитель машины, поворачивая ось излучателя в вертикальной плоскости разметки с помощью дистанционного управления электроприводом излучателя. Чтобы облегчить совмещение пятна излучения с мишенью при разметке волнистых участков дороги, используют средства развертывания лазерного луча в вертикальной плоскости разметки. Для обеспечения возможности разметки дорог, имеющих неровные края с частыми сужениями и расширениями, используют средства деления лазерного луча на два световых потока с помощью которых водитель отслеживает края дороги или ранее размеченные линии.
Способ-прототип не автоматизирует вождение разметочной машины и, тем более, не обеспечивает группового вождения таких машин. При дневном освещении световое пятно, даже на флуоресцирующей мишени, плохо заметно. Длительное отслеживание водителем смещений светового пятна на мишени приводит к утомлению водителя и ошибкам вождения. Формируемые линии разметки имеют вид ломаных линий. На извилистых дорогах частая переустановка разметочной машины и мишени приводит большим настроечным трудозатратам и снижению производительности труда дорожных рабочих.
Известны системы, облегчающие работу водителя в процессе разметки, например, система «Road Lazer" американской фирмы «Graco" (Данник А.И. Существующие способы навигации разметочных машин. Опубликовано 08.06.2015 г. http://www.razmetka.com.ua/markirovochnye-mashiny-graco/ Дорожная разметка. Все о разметке автомобильных дорог). Такая система использует колесо, которое идет по следу предварительной разметки, для точного указания пути следования краскопульта, а также видеокамеру в нижней части разметочной машины для лучшего обзора указанного колеса и индикатор обзора на пульте водителя. Задача водителя в процессе управления движением машины дорожной разметки сводится к поддержке индикатора в положении над линией предварительной разметки.
При этом процесс управления движением разметочной машины выполняется вручную. Наблюдение за положением индикатора требует максимального внимания, которое в течение длительного времени поддерживать очень трудно. Но главное, система для своего использования требует наличия предварительной разметки полос и не решает задачу группового вождения машин.
Известна «Система для группового вождения самоходных сельскохозяйственных машин» (Патент SU 743612 А1 от 10.04.78, МПК5: А01В 69/04, опубл. 30.06.1980). Система включает в себя ведущую и ведомые машины, двигающиеся друг за другом. На ведущей машине расположен ориентир в виде излучателя электромагнитного поля, выполненного в виде взаимно перпендикулярных вибраторов, и радиопередающее устройство, включающее электронные ключи, коммутирующее устройство и радиопередатчик. Воспринимающие элементы ведомых машин выполнены из четырех идентичных приемников, два из которых имеют антенны всенаправленного действия, а два других - взаимно перпендикулярные вибраторы. Функциональная схема воспринимающих элементов с устройством преобразования сигналов в координаты содержит радиоприемники с идентичными амплитудной и фазочастотной характеристиками, схему деления амплитуд, сумматор, преобразователи частоты, гетеродин, узкополосные фильтры и фазоизмерительное устройство. Один вибратор ведущей машины расположен параллельно ее курсу, другой - перпендикулярно. Сигнал, излучаемый вибраторами передатчика, принимается приемными антеннами и вибраторами приемников, установленными на ведомых машинах. На входы приемников подается напряжение с соответствующих взаимно перпендикулярных вибраторов, причем один вибратор установлен параллельно курсу ведомой машины, другой вибратор - перпендикулярно. Таким образом, и на передающем и на приемном конце имеются средства для измерения соотношения амплитуд. При этом для каждого соотношения амплитуд существует свое соотношение амплитуд сигналов, принимаемых приемниками взаимно перпендикулярных вибраторов. Сигналы с выходов указанных приемников поступают на схему деления амплитуд. Если соотношение амплитуд отличается от заданного значения, то выдается сигнал коррекции, поступающий в устройства преобразования сигналов в текущие координаты ведомой машины относительно ведущей машины.
Данная система, во-первых, не обеспечивает полной автоматизации группового вождения машин; во-вторых, нацелена на решение задачи группового вождения машин друг за другом, а не фронтом; и, в третьих, принципиально не может обеспечить необходимой точности (погрешность до 5 см) определения координат ведомых машин, даже с улучшающими ее патентами, вследствие аналоговых принципов ее построения.
Наиболее близким к предлагаемой системе является «Способ ориентирования и устройство для ориентирования дорожных машин» (Патент RU 2100521 С1 от 12.04.1995, МПК7: Е01С 23/16, Е01С 23/18, опубл. 27.12.1997). Данное устройство включает в себя лазерный излучатель, установленный на машине в обойме, которая снабжена цапфой, установленной в отверстии рамки, и может поворачиваться в вертикальной плоскости электроприводом, связанным проводом с расположенным в кабине водителя пультом управления. Рамка снабжена отверстиями, расстояния от которых до оси равны расстояниям до оси отверстий, через которые пропущены болты, которые крепят рамки к П-образному основанию для установки лазерного излучателя. Основание крепится над кабиной машины к поперечине с помощью хомутов и болтов, что позволяет перед началом разметки устанавливать ось лазерного излучателя в одной вертикальной плоскости с осью рабочего органа машины, а также поворачивать излучатель в вертикальной плоскости вокруг оси поперечины трубы. Рамка может быть повернута на 90 градусов и закреплена в этом положении болтами, пропущенными через отверстия. При этом может дистанционно управлять в плоскости, параллельной оси поперечины. Кроме того, возможна шарнирная установка рамки на вертикальной оси, закрепленной на основании и оснащение ее вторым дистанционно управляемым электроприводом для дистанционного поворота вокруг двух взаимно перпендикулярных осей. На краях поперечины установлены вторые хомуты с крепежными элементами, связывающими хомуты со стойками, которые опираются на отбортовку крыши кабины. Стойки крепятся к отбортовке зажимами и крепежными элементами. Для осуществления описанного выше способа ориентирования устройство дополнительно снабжено мишенью, ось которой при стационарной установке лежит в вертикальной плоскости, проходящей через оси полосы разметки, излучателя и рабочего органа машины. Мишень или ее центральная часть покрыта светоотражающим материалом, например пленкой, используемой для изготовления дорожных знаков. Мишень неподвижно соединена с цилиндрическим стержнем, который неподвижно соединен аналогично излучателю в поворотной обойме и рамке с возможностью поворота вокруг горизонтальной и вертикальной оси. Рамка с мишенью может быть установлена на поперечине над кабиной подвижного транспортного средства с помощью основания и хомутов, а поперечина закреплена над кабиной транспортного средства с помощью вторых хомутов стоек. Устройство также снабжено блоком питания излучателя. Кроме того, в кабине водителя имеется пульт дистанционного управления поворотом излучателя в вертикальной и/или горизонтальной плоскости. Лазерный излучатель оснащен насадкой для развертки луча в вертикальной плоскости, снабженного цилиндрической расточкой, охватывающей выходной участок излучателя, и перпендикулярным оси расточки отверстием, в котором установлена цилиндрическая линза. В качестве средства развертки луча могут также использоваться цилиндрическая трубка, вращающееся зеркало и призма. С помощью призмы или других средств деления луча (например, полупрозрачного стекла и зеркала) возможно получение на дорожном покрытии двух световых пятен, которые при соответствующих углах наклона и поворота излучателя могут быть легко установлены симметрично оси будущей полосы разметки.
Устройство-прототип не автоматизирует вождение разметочной машины и, тем более, не обеспечивает группового вождения таких машин. При дневном освещении световое пятно, даже на флуоресцирующей мишени, плохо заметно. Длительное отслеживание водителем смещений светового пятна на мишени приводит к утомлению водителя и ошибкам вождения. Формируемые линии разметки имеют вид ломаных линий. На извилистых дорогах частая переустановка разметочной машины и мишени приводит большим настроечным трудозатратам и снижению производительности труда дорожных рабочих.
Задачей предлагаемого изобретения является автоматизация управления параллельным движением группы машин дорожной разметки в процессе нанесения линий разделения полос движения и линий ограничения дорожного полотна без их предварительной ручной разметки и маркировки.
Техническим результатом предлагаемого изобретения является повышение производительности труда дорожных рабочих.
Технический результат достигается тем, что в способ автоматического группового вождения дорожных машин, содержащий действие по регулярному формированию с борта ведущей машины вертикальной световой плоскости посредством развертки импульсного лазерного луча, а также действие по управлению рулевым механизмом ведущей дорожной машины, минимизирующее рассогласование положения ее правого маркера относительно предварительно заданной виртуальной установочной линии, дополнительно вводят следующие действия:
для ведущей дорожной машины:
- предварительно или после аварийного останова под ручным управлением ведущую машину размещают в крайней правой по ходу движения полосе дорожного полотна так, чтобы боковое рассогласование положения ее правого маркера относительно правой границей дорожного полотна не превышало предельного установочного значения;
- после формирования команд «подготовка» или «движение» до формирования команды «останов» периодически определяют боковое смещение правого маркера относительно правого края дорожного полотна посредством выявления положения наибольшего перепада в интенсивности отраженного оптического излучения на поперечной линии измерения, имеющего место либо вследствие разницы в коэффициентах отражения дорожного полотна и обочины, либо вследствие превышения обочины над дорожным полотном, либо вследствие наличия отбойника на границе дорожного полотна и обочины;
- для каждого замера бокового смещения правого маркера вычисляют его нивелированное значение, равное с его учетом среднему по заранее заданной совокупности предшествующих аналогичных измерений;
- вычисляют текущее боковое рассогласование между заданным в результате предварительной настройки установочным и текущим нивелированным боковым смещением правого маркера относительно правого края дорожного полотна;
- одновременно с каждым формированием световой плоскости при боковом рассогласовании, не превышающем предельного установочного, формируют акустический импульс в полупространство по левому борту этой машины, перекрывающий всю ширину дорожного полотна, с нахождением центра генерации на вертикали центра генерации световой плоскости, а также формируют внутримашинную и внешнюю индикацию готовности к разметке, в противном случае акустическое излучение не формируют;
- после формирования команды «движение» до формирования команды «останов» регулярно вычисляют текущее скоростное рассогласование между заданной при предварительной настройке установочной скоростью движения ведущей машины и ее фактической текущей скоростью;
- после формирования команды «движение» до формирования команды «останов» при успешном определении края дорожного полотна и отсутствии приема аварийного излучения от ведомых машин дорожной разметки управляют движением ведущей машины так, чтобы минимизировать текущее скоростное рассогласование;
- в процессе движения ведущей машины при приеме аварийного излучения от какой-либо ведомой дорожной машины или при неудаче в определении бокового рассогласования в течение заданного количества циклов измерений бокового смещения правого маркера или формировании команды «останов» машину останавливают и одновременно прекращают формирование световой плоскости и акустического излучения в сторону ведомых машин, а также формируют внутримашинную и внемашинную аварийную индикацию;
причем световую плоскость формируют ориентированной влево с перекрытием всей ширины дорожного полотна и с прохождением через правый маркер этой машины после формирования команд «подготовка» или «движение» до формирования команды «останов» при успешном определении края дорожного полотна и отсутствии приема аварийного излучения от ведомых машин, в противном случае формирование световой плоскости прекращают;
для каждой ведомой дорожной машины:
- предварительно или после аварийного останова под ручным управлением размещают машину на свободную дорожную полосу так, чтобы ее правый маркер находился приблизительно на одной поперечной с ведущей машиной стартовой прямой и над предполагаемой линией разметки так, чтобы обеспечивался прием лазерного излучения от ведущей машины;
- после формирования команды «движение» до формирования команды «останов» или прекращения приема лазерного излучения от ведущей машины регулярно принимают импульсное лазерное излучение от ведущей машины и на этой основе регулярно определяют продольное рассогласование положения правого маркера ведомой машины относительно световой плоскости в процессе движения машины;
- после формирования команды «движение» до формирования команды «останов» или прекращения приема лазерного излучения от ведущей машины управляют продольным движением ведомой машины так, чтобы минимизировать ее текущее продольное рассогласование;
- после формирования команды «движение» до формирования команды «останов» или прекращения приема акустического излучения от ведущей машины регулярно принимают импульсное акустическое излучение от ведущей машины и по временной задержке от соответствующего момента приема лазерного излучения и общеизвестной средней скорости распространения звука в воздушной среде регулярно определяют расстояние между одноименными маркерами ведущей и ведомой машин;
- для каждого замера расстояния между одноименными маркерами ведущей и ведомой машин вычисляют его нивелированное значение, равное с его учетом среднему по заранее заданной совокупности предшествующих аналогичных измерений;
- вычисляют текущее боковое рассогласование между предварительно заданным при настройке ведомой машины установочным и текущим нивелированным расстоянием между одноименными маркерами ведущей и ведомой машин;
- управляют рулевым механизмом ведомой машины так, чтобы минимизировать ее текущее боковое рассогласование;
- в процессе движения машины при наличии приема как лазерного, так и акустического излучения, а также боковом рассогласовании, не превышающем предельное установочное боковое рассогласование, формируют внутримашинную и внешнюю индикацию готовности к разметке, в противном случае этого не делают;
- при наличии приема лазерного излучения от ведущей машины и одновременном отсутствии приема акустического излучения в течение заданного числа циклов измерений продолжают движение машины с нулевым боковым рассогласованием и без индикации готовности к разметке, после чего машину останавливают и одновременно формируют аварийную внутримашинную индикацию и внешнее аварийное излучение для ведущей машины;
- при отсутствии приема лазерного излучения от ведущей машины в течение заданного числа циклов измерений или формировании команды «останов» данную машину останавливают и одновременно формируют аварийную внутримашинную индикацию и внешнее аварийное излучение для ведущей машины;
причем источники формирования световой плоскости и акустического излучения, а также средства обнаружения аварийного излучения на борту ведущей машины размещают с превышением по высоте над средствами обнаружения световой плоскости и акустического излучения, а также источником аварийного излучения на борту каждой ведомой машины, обеспечивающем исключение возможности их экранирования при любых взаимных положениях всех дорожных машин;
причем аварийное излучение формируют электромагнитным, либо акустическим, либо совместным образом с параметрами отличными от параметров излучения при формировании световой плоскости и акустического излучения, используемого для определения межмашинных расстояний;
причем установочное боковое смещение, скорость движения и предельное боковое рассогласование ведущей машины, а также установочное межмашинное расстояние и предельное боковое рассогласование для каждой ведомой машины, а также команды «подготовка», «движение» и «останов» указанных машин формируют непосредственно на их бортах посредством тактильного создания соответствующих кодов в форме электрических сигналов, либо удаленным образом по акустическому или радиоканалу с параметрами отличными от параметров излучения при формировании световой плоскости и акустического излучения, используемого для определения межмашинных расстояний.
Технический результат достигается также тем, что в систему для реализации способа автоматического группового вождения дорожных машин, содержащую формирователь световой плоскости на борту ведущей дорожной машины, дополнительно введены
на борту ведущей машины: линейка активных оптоэлектронных датчиков, одноканальный мультиплексор, датчик аварийного излучения, первый привод торможения, дешифратор, блок определения бокового рассогласования, двухразрядный регистр, первый аварийный индикатор-излучатель, первый кольцевой счетчик, первый сервопривод рулевого механизма, первый датчик команд оператора, цифровой спидометр, первый генератор импульсов, первое ПЗУ контроля готовности к разметке, первый датчик настроек параметров движения, первое ПЗУ управления скоростью движения, акустический излучатель, первый индикатор-излучатель готовности к разметке, первый сервопривод скорости движения
и следующие блоки на борту ведомой машины: линейка пассивных оптоэлектронных датчиков, датчик акустического излучения, второй аварийный индикатор-излучатель, второй привод торможения, блок определения позиционного рассогласования, второй датчик настроек параметров движения, первый RS-триггер, второй датчик команд оператора, второе ПЗУ управления скоростью движения, второй сервопривод рулевого механизма, второе ПЗУ контроля готовности к разметке, первый логический элемент ИЛИ-НЕ, второй сервопривод скорости движения, второй индикатор-излучатель готовности к разметке,
причем применительно к оборудованию ведущей машины: выход первого генератора импульсов соединен с входом первого кольцевого счетчика, первым входом блока определения бокового рассогласования, а также с первыми входами формирователя световой плоскости и акустического излучателя, линии шины первого выхода первого кольцевого счетчика соединены с одноименными линиями шины входа дешифратора, одноименными линиями первого входа одноканального мультиплексора и одноименными линиями шины второго входа блока определения бокового рассогласования, второй выход первого кольцевого счетчика связан с третьим входом блока определения бокового рассогласования, линии шины выхода дешифратора соединены с одноименными линиями входной шины линейки активных оптоэлектронных датчиков, линии шины выхода которого связаны с одноименными линиями шины второго входа одноканального мультиплексора, выход которого соединен с четвертым входом блока определения бокового рассогласования, пятый вход которого связан с первым выходом первого датчика настроек параметров движения, первый выход блока определения бокового рассогласования соединен с первым входом двухразрядного регистра, а линии шины второго выхода связаны с одноименными линиями шины входа первого сервопривода рулевого механизма и одноименными линиями шины первого входа первого ПЗУ контроля готовности к разметке, линии шины второго выхода первого датчика настройки параметров движения соединены с одноименными линиями шины второго входа первого ПЗУ контроля готовности к разметке, а линии шины третьего выхода связаны с одноименными линиями шины первого входа первого ПЗУ управления скоростью движения, первый выход первого ПЗУ контроля готовности к разметке соединен с вторым входом акустического излучателя, а второй выход связан с входом первого индикатора-излучателя готовности к разметке, выход датчика аварийного излучения соединен со вторым входом двухразрядного регистра, линии шины третьего входа которого подключены к одноименным линиям шины выхода первого датчика команд оператора, линии шины выхода цифрового спидометра связаны с одноименными линиями шины второго входа первого ПЗУ управления скоростью движения, линии шины выхода которого связаны с одноименными линиями шины первого входа первого сервопривода скорости движения, 0-линия шины выхода двухразрядного регистра соединена с входом датчика аварийного излучения, 1-линия шины выхода двухразрядного регистра соединена с входами первого привода торможения, первого аварийного индикатора-излучателя, вторым входом первого сервопривода скорости движения, а также со вторым входом формирователя световой плоскости и третьим входом акустического излучателя,
а применительно к оборудованию ведомой машины: линии шины выхода линейки пассивных оптоэлектронных датчиков соединены с одноименными линиями шины первого входа блока определения позиционного рассогласования, линии шины первого выхода которого связаны с одноименными линиями шины входа второго ПЗУ управления скоростью движения, линии шины второго выхода соединены с одноименными линиями шины входа второго сервопривода рулевого механизма и шины первого входа второго ПЗУ контроля готовности к разметке, выход датчика акустического излучения связан со вторым входом блока определения позиционного рассогласования, линии шины третьего входа которого связаны с одноименными линиями шины первого выхода второго датчика настроек параметров движения, третий выход блока определения позиционного рассогласования связан с первым входом первого логического элемента ИЛИ-НЕ, четвертый выход связан с первым входом первого RS-триггера, второй вход и третий вход первого RS-триггера соединены соответственно с первым выходом и вторым выходом второго датчика команд оператора, линии шины выхода второго ПЗУ управления скоростью движения связаны с одноименными линиями шины первого входа второго сервопривода скорости движения, выход первого RS-триггера связан с входом второго аварийного индикатора-излучателя, входом второго привода торможения и вторым входом первого сервопривода скорости движения, линии шины второго выхода второго датчика настроек параметров движения связаны с одноименными линиями шины второго входа второго ПЗУ контроля готовности к разметке, выход которого соединен со вторым входом первого логического элемента ИЛИ-НЕ, своим выходом связанного со входом второго индикатора-излучателя готовности к разметке,
причем формирователь световой плоскости, акустический излучатель и датчик аварийного излучения на ведущей дорожной машине размещают на мачте.
Блок определения бокового рассогласования включает в себя следующие блоки: аналого-цифровой преобразователь, первый регистр, второй регистр, первый вычитатель, первый ждущий блокинг-генератор, второй ждущий блокинг-генератор, третий ждущий блокинг-генератор, ПЗУ сравнения перепадов яркости, первый логический элемент И, логический элемент НЕ, второй логический элемент И, третий регистр, первый счетчик, второй RS-триггер, первый многоканальный мультиплексор, четвертый регистр, второй кольцевой счетчик, второй генератор импульсов, память FIFO замеров боковых смещений, первый сумматор-накопитель, пятый регистр, второй вычитатель,
причем первым входом блока определения бокового рассогласования служат связанные между собой первый вход АЦП, первый вход первого регистра и вход первого ждущего блокинг-генератора, вторым входом блока определения бокового рассогласования служат связанные одноименными линиями шина первого входа четвертого регистра и шина первого входа первого логического элемента И, третьим входом блока определения бокового рассогласования служат связанные между собой вход логического элемента НЕ, первый вход первого счетчика, первый вход третьего регистра и второй вход четвертого регистра, четвертым входом блока определения бокового рассогласования служит второй вход АЦП, пятым входом блока определения бокового рассогласования служит первый вход второго вычитателя, первым выходом блока определения бокового рассогласования служит линия старшего разряда шины выхода первого счетчика, вторым выходом блока определения бокового рассогласования служит выход пятого регистра, выход первого ждущего блокинг-генератора соединен с входом второго ждущего блокинг-генератора и первым входом второго логического элемента И, выход второго ждущего блокинг-генератора связан с входом третьего ждущего блокинг-генератора, вторым входом первого регистра и первым входом второго регистра, линии шины выхода АЦП связаны с одноименными линиями шины третьего входа первого регистра, линии шины выхода которого связаны с одноименными линиями шины второго входа второго регистра и одноименными линиями шины первого входа первого вычитателя, линии шины второго входа которого связаны с одноименными линиями шины второго выхода второго регистра, линии шины выхода первого вычитателя связаны с одноименными линиями шины первого входа ПЗУ сравнения перепадов яркости и с одноименными линиями шины второго входа третьего регистра, линии шины выхода которого соединены с одноименными линиями шины второго входа ПЗУ сравнения перепадов яркости, выход которого связан со вторым входом второго логического элемента И, выход третьего ждущего блокинг-генератора соединен со вторым входом первого логического элемента И, выход которого связан с первым входом второго RS-триггера, первым входом первого многоканального мультиплексора и первым входом памяти FIFO-замеров боковых смещений, выход второго логического элемента И связан с третьим входом третьего регистра, с третьим входом четвертого регистра и вторым входом первого счетчика, выход логического элемента НЕ соединен с третьим входом второго логического элемента, выход второго RS-триггера соединен с входом второго генератора импульсов, линии шины выхода памяти FIFO-замеров боковых смещений связаны с одноименными линиями шины первого входа первого сумматора-накопителя и шины второго входа первого многоканального мультиплексора, линии шины второго входа которого связаны с одноименными линиями шины выхода четвертого регистра, линии шины выхода первого многоканального мультиплексора связаны с одноименными линиями шины второго входа памяти FIFO-замеров боковых смещений, выход второго генератора связан с третьим входом и четвертым входом памяти FIFO-замеров боковых смещений, входом второго кольцевого счетчика и вторым входом первого сумматора-накопителя, выход второго кольцевого счетчика соединен со вторым входом второго RS-триггера, первым входом пятого регистра и вторым входом второго вычитателя, линии группы старших разрядов шины выхода которого связаны с одноименными линиями шины третьего входа второго вычитателя, линии шины выхода которого связаны с одноименными линиями второго входа пятого регистра.
Блок определения позиционного рассогласования включает в себя следующие блоки: второй логический элемент ИЛИ, третий кольцевой счетчик, второй сумматор-накопитель, шестой регистр, сдвиговый регистр, третий RS-триггер, третий генератор импульсов, четвертый генератор импульсов, второй счетчик, второй многоканальный мультиплексор, память FIFO- замеров межмашинных расстояний, третий счетчик, четвертый RS-триггер, пятый генератор импульсов, четвертый кольцевой счетчик, третий вычитатель, седьмой регистр,
причем первым входом блока определения позиционного рассогласования служат связанные между собой одноименными линиями шина входа второго логического элемента ИЛИ и шина первого входа сдвигового регистра, вторым входом блока определения позиционного рассогласования служат связанные между собой первый вход второго счетчика, первый вход второго многоканального мультиплексора, первый вход памяти FIFO-замеров межмашинных расстояний, первый вход четвертого RS-триггера и первый вход второго сумматора-накопителя, третьим входом блока определения позиционного рассогласования служит шина первого входа третьего вычитателя, первым выходом блока определения позиционного рассогласования служит шина выхода шестого регистра, вторым выходом блока определения позиционного рассогласования служит шина выхода третьего вычитателя, третьим выходом блока определения позиционного рассогласования служит линия старшего разряда шины первого выхода второго счетчика, четвертым выходом блока определения позиционного рассогласования служит выход третьего счетчика, выход второго логического элемента ИЛИ связан с первым входом третьего кольцевого счетчика, со вторым входом сдвигового регистра, первым входом третьего RS-триггера, вторым входом второго счетчика и первым входом третьего счетчика, выход сдвигового регистра связан со вторым входом третьего RS-триггера и первым входом шестого регистра, линии шины второго входа которого связаны с одноименными линиями шины выхода третьего кольцевого счетчика, выход третьего RS-триггера связан с входом третьего генератора импульсов, выход которого соединен с третьим входом сдвигового регистра и вторым входом третьего кольцевого счетчика, выход четвертого генератора импульсов соединен с третьим входом второго счетчика и вторым входом третьего счетчика, линии шины второго выхода второго счетчика связаны с одноименными линиями шины второго входа третьего многоканального мультиплексора, линии шины выхода которого связаны с одноименными линиями шины второго входа памяти FIFO-замеров межмашинных расстояний, линии шины выхода которой связаны с одноименными линиями шины третьего входа второго многоканального мультиплексора и с одноименными линиями шины второго сумматора-накопителя, выход четвертого RS-триггера связан с входом пятого генератора импульсов, выход которого связан со входом четвертого кольцевого счетчика, третьим входом второго сумматора-накопителя, а также третьим входом и четвертым входом памяти FIFO-замеров межмашинных расстояний, выход четвертого кольцевого счетчика связан со вторым входом четвертого RS-триггера и первым входом седьмого регистра, линии шины второго входа которого связаны с одноименными линиями группы старших разрядов шины выхода второго сумматора-накопителя, линии шины выхода седьмого регистра связаны с одноименными линиями шины второго входа третьего вычитателя.
Технический результат достигается за счет введения в заявляемые способ и систему новых действий, блоков и связей, которые обеспечивают автоматическое параллельное вождение дорожных машин в процессе формирования продольных линий дорожной разметки.
Сущность предлагаемого изобретения поясняется следующими чертежами и таблицами:
Фиг. 1 Сенсорное оборудование машин.
Фиг. 2 Граф управления ведущей машиной.
Фиг. 3 Граф управления ведомой машины.
Фиг. 4 Функциональная схема системы.
Фиг. 5 Блок определения бокового рассогласования.
Фиг. 6 Блок определения позиционного рассогласования.
Табл. 1 Активные адреса первого и второго ПЗУ контроля готовности к разметке.
Табл. 2 Значимое содержимое первого ПЗУ управления скоростью движения.
Табл. 3 Содержимое второго ПЗУ управления скоростью движения.
Табл. 4 Активные адреса ПЗУ сравнения изменений интенсивности.
Предлагаемый способ автоматического вождения дорожных машин включает в себя следующие действия:
Для ведущей дорожной машины:
D1. Предварительно или после аварийного останова под ручным управлением ведущую машину размещают в крайней правой по ходу движения полосе дорожного полотна так, чтобы боковое рассогласование положения ее правого маркера относительно правой границей дорожного полотна не превышало предельного установочного значения.
D2. После формирования команд «подготовка» или «движение» до формирования команды «останов» периодически определяют боковое смещение правого маркера относительно правого края дорожного полотна посредством выявления положения наибольшего перепада в интенсивности отраженного оптического излучения на поперечной линии измерения, имеющего место либо вследствие разницы в коэффициентах отражения дорожного полотна и обочины, либо вследствие превышения обочины над дорожным полотном, либо вследствие наличия отбойника на границе дорожного полотна и обочины.
D3. Для каждого замера бокового смещения правого маркера вычисляют его нивелированное значение, равное с его учетом среднему по заранее заданной совокупности предшествующих аналогичных измерений.
D4. Вычисляют текущее боковое рассогласование между заданным в результате предварительной настройки установочным и текущим нивелированным боковым смещением правого маркера относительно правого края дорожного полотна.
D5. Управляют рулевым механизмом ведущей дорожной машины так, чтобы минимизировать боковое рассогласование положения ее правого маркера.
D6. После формирования команд «подготовка» или «движение» до формирования команды «останов» при успешном определении края дорожного полотна и отсутствии приема аварийного излучения от ведомых дорожных машин с борта ведущей машины регулярно посредством развертки импульсного лазерного луча формируют световую плоскость, ориентированную вертикально влево, проходящую через правый маркер этой машины и перекрывающую всю ширину дорожного полотна, в противном случае формирование световой плоскости прекращают.
D7. Одновременно с каждым формированием световой плоскости при боковом рассогласовании, не превышающем предельного установочного, формируют акустический импульс в полупространство по левому борту этой машины, перекрывающий всю ширину дорожного полотна, с нахождением центра генерации на вертикали центра генерации световой плоскости, а также формируют внутримашинную и внешнюю индикацию готовности к разметке, в противном случае акустическое излучение не формируют.
D8. После формирования команды «движение» до формирования команды «останов» регулярно вычисляют текущее скоростное рассогласование между заданной при предварительной настройке установочной скоростью движения ведущей машины и ее фактической текущей скоростью.
D9. После формирования команды «движение» до формирования команды «останов» при успешном определении края дорожного полотна и отсутствии приема аварийного излучения от ведомых дорожных машин управляют движением ведущей машины так, чтобы минимизировать текущее скоростное рассогласование.
D10. В процессе движения ведущей машины при приеме аварийного излучения от какой-либо ведомой дорожной машины, формировании оператором команды «останов» или при неудаче в определении бокового рассогласования в течение заданного количества циклов измерений бокового смещения правого маркера машину останавливают и одновременно прекращают формирование световой плоскости и акустического излучения в сторону остальных дорожных машин, а также формируют внутримашинную и внемашинную аварийную индикацию.
Причем световую плоскость формируют ориентированной влево с перекрытием всей ширины дорожного полотна и с прохождением через правый маркер этой машины после формирования команд «подготовка» или «движение» до формирования команды «останов» при успешном определении края дорожного полотна и отсутствии приема аварийного излучения от ведомых машин, в противном случае формирование световой плоскости прекращают.
Причем период формирования световой плоскости должен быть не меньше времени прохождения акустическим сигналом всей ширины дорожного полотна.
Для каждой ведомой дорожной машины:
D11. Предварительно или после аварийного останова под ручным управлением размещают машину на свободную дорожную полосу так, чтобы ее правый маркер находился приблизительно на одной поперечной с ведущей машиной стартовой прямой и над предполагаемой линией разметки так, чтобы обеспечивался прием лазерного излучения от ведущей машины.
D12. После формирования команды «движение» до формирования команды «останов» или прекращения приема лазерного излучения от ведущей машины регулярно принимают импульсное лазерное излучение от ведущей машины и на этой основе регулярно определяют продольное рассогласование положения правого маркера ведомой машины относительно световой плоскости в процессе движения машины.
D13. После формирования команды «движение» до формирования команды «останов» или прекращения приема лазерного излучения от ведущей машины управляют продольным движением ведомой машины так, чтобы минимизировать ее текущее продольное продольное рассогласование.
D14. После формирования команды «движение» до формирования команды «останов» или прекращения приема акустического излучения от ведущей машины регулярно принимают импульсное акустическое излучение от ведущей машины и по временной задержке от соответствующего момента приема лазерного излучения и общеизвестной средней скорости распространения звука в воздушной среде регулярно определяют расстояние между маркерами ведущей и ведомой машин.
D15. Для каждого замера расстояния между маркерами ведущей и ведомой машин вычисляют его нивелированное значение, равное с его учетом среднему по заранее заданной совокупности предшествующих аналогичных измерений.
D16. Вычисляют текущее боковое рассогласование между предварительно заданным при настройке ведомой машины установочным и текущим нивелированным расстоянием между маркерами ведущей и ведомой машин.
D17. Управляют рулевым механизмом ведомой машины так, чтобы минимизировать ее текущее боковое рассогласование.
D18. В процессе движения машины при наличии приема как лазерного, так и акустического излучения, а также боковом рассогласовании, не превышающем предельное установочное боковое рассогласование, формируют внутримашинную и внешнюю индикацию готовности к разметке, в противном случае этого не делают.
D19. При наличии приема лазерного излучения от ведущей машины и одновременном отсутствии приема акустического излучения в течение заданного числа циклов измерений продолжают движение машины с нулевым боковым рассогласованием и без индикации готовности к разметке, после чего машину останавливают и одновременно формируют аварийную внутримашинную индикацию и внешнее аварийное излучение для ведущей дорожной машины.
D20. При отсутствии приема лазерного излучения от ведущей машины в течение заданного числа циклов измерений или формировании команды «останов» данную машину останавливают и одновременно формируют аварийную внутримашинную индикацию и внешнее аварийное излучение для ведущей дорожной машины.
Причем источники формирования световой плоскости и акустического излучения, а также средства обнаружения аварийного излучения на борту ведущей машины размещают с превышением по высоте над средствами обнаружения световой плоскости и акустического излучения, а также источником аварийного излучения на борту каждой ведомой машины, обеспечивающем исключение возможности их экранирования при любых взаимных положениях всех дорожных машин.
Набор выполняемых действий по обеспечению автоматического группового вождения дорожных машин в каждый момент времени определяется графом управления для ведущей машины фиг. 2, а для каждой ведомой машины - фиг. 3, где в качестве состояний обозначены различные типы движения машин и в качестве условий выполнения переходов выступают определенные комплексы событий из следующего перечня:
Р - прохождение команды «подготовка»;
Е - прохождение команды «движение»;
S - прохождение команды «останов»;
L - прием лазерного излучения;
U - прием акустического излучения;
А - прием аварийного излучения;
R - боковое рассогласование в пределах нормы;
Н - правая граница дорожного полотна обнаружена.
Выполнение перечисленных событий соответствует истинному значению указанных логических переменных. Не выполнение какого-либо события в логических выражениях далее будет обозначено наличием восклицательного знака ! перед соответствующей переменной. Сочетание событий соответствует конъюнкции соответствующих переменных и обозначается их последовательным написанием без пробелов. Операция логической дизъюнкции обозначается знаком амперсанда &.
Предлагаемый способ применительно к ведущей машине работает следующим образом. После доставки бригады дорожных машин, например, автопоездом к месту начала разметки или после аварийного останова бригады оператор в режиме ручного управления выставляет ведущую машину на крайнюю правую полосу движения так, чтобы отклонение ее правого маркера от края шоссе было в пределах заданной нормы. На графе управления (фиг. 2) это соответствует состоянию «аварийный останов», а процесс установки машины в исходное состояние соответствует переходу в это же состояние с действием D1 по условию !Hv!R. После завершения установки машины оператор формирует команду «подготовка» Р с последующим выполнением действия D2 по определению смещения правого маркера ведущей машины относительно края шоссе. Основанием для успешного автоматического определения края дорожного полотна является, обычно визуально заметная, разница в отражательной способности солнечной радиации (альбедо) асфальта и обочины. Например, по данным источника [5] альбедо черного асфальта составляет 4%, а желтого песка 14.5%, хотя следует иметь в виду, что альбедо зависит от материалов асфальта и обочины, фактуры указанных поверхностей, их изношенности, влажности, запыленности и т.д. При успешном выполнении действия D2 машина переходит в состояние «подготовительный останов». В этом состоянии циклически выполняют набор действий D2-D7. В результате чего определяется боковое смещение правого маркера ведущей машины относительно правого края дорожного полотна, вычисляется нивелированное значение бокового смещения по заданному количеству предшествующих аналогичных замеров, вычисляется боковое рассогласование ведущей машины относительно заранее заданного установочного бокового смещения и управляют рулевым механизмом так, чтобы минимизировать это рассогласование. Одновременно формируют внутри и внемашинную индикацию готовности машины непосредственно к разметке и регулярно формируют по левому борту машины импульсную световую плоскость и акустический импульс. При неудачном определении края дорожного полотна по команде D2 или при формировании оператором команды «останов» S, т.е. при выполнении условия !HvS машина переходит в состояние «аварийный останов» с выполнением действия D10. При этом прекращают формирование световой плоскости и акустического излучения, а также формируют внутри и внемашинную аварийную индикацию. Из состояния «подготовительный останов» по команде оператора «движение» Е переводят машину в состояние «движение с разметкой» с выполнением комплекса действий D2-D9. В дополнении к ранее описанным действиям D2-D7 в этом случае по действиям D8 и D9 определяют рассогласование между текущей и установочной скоростью движения ведущей машины и управляют движением машины так, чтобы минимизировать скоростное рассогласование. Если в процессе движения машины боковое рассогласование находится в допустимых пределах при отсутствии аварийного излучения от ведомых машин, т.е. при условии HR!A, то формируют внутри и внемашинную индикацию готовности к разметке оператору в качестве сигнала разрешения включения маркеров (краскопультов) разметки и продолжают движение с регулярным выполнением действий D2-D9. Если во время нахождения машины в состоянии «движение с разметкой» по действию D2 не удается определить край дорожного полотна или ведущая машина принимает аварийное излучение от ведомых машин или от оператора поступает команда «останов», т.е. возникает ситуация !HvAvS, то машина переходит в состояние «аварийный останов» с выполнением действия D10. При этом прекращают формирование световой плоскости и акустического излучения, а также формируют внутри и внемашинную аварийную индикацию. Если во время нахождения машины в состоянии «движение с разметкой» при отсутствии приема аварийного излучения боковое рассогласование превышает установочную норму, т.е. возникает ситуация H!R!A, то машина переходит в состояние «движение без разметки» с выполнением набора действий D2-D9. При этом выполняют те же действия, что и в состоянии «движение с разметкой», но без формирования индикации готовности к разметке. Сохранение условия H!R!A приводит к повторению действий D2-D9 с нахождением машины в состоянии «движение без разметки». Когда боковое рассогласование входит в норму, т.е. создается ситуация HR!A, то реализуется переход к состоянию «движение с разметкой» с выполнением того же комплекса действий D2-D9. Однако при этом формируется внутри и внемашинная индикация готовности к разметке. Если же в состоянии «движение без разметки» при выполнении действия D2 не удается определить край шоссе или оператор формирует команду «останов» или принимается аварийное излучение от ведомых машин, т.е. создается ситуация Av!HvS, то осуществляется переход в состояние «аварийный останов» с выполнением действия D10, по которому машину останавливают и одновременно прекращают формирование световой плоскости и акустического излучения в сторону остальных дорожных машин, а также формируют внутримашинную и внемашинную аварийную индикацию.
Применительно к ведущей машине предлагаемый способ работает следующим образом. Все ведомые машины устанавливают в исходное положение в режиме ручного управления после установки в исходное положение ведущей машины и формирования применительно к ней команды «подготовка». При этом каждую ведомую машину выставляют на свободную полосу движения так, чтобы ее правый маркер находился приблизительно на одной поперечной прямой с аналогичным маркером ведущей машины и над предполагаемой линией разметки так, чтобы обеспечивался прием лазерного излучения от ведущей машины. На графе управления (фиг. 3) это соответствует состоянию «аварийный останов», а процесс установки машины в исходное состояние соответствует переходу в это же состояние с действием D11 по условию !L. После формирования команды «движение» при наличии приема лазерного и акустического излучений, а также боковом рассогласовании ведомой машины в пределах установочной нормы, т.е. при условии ELUR осуществляют перевод машины в состояние «движение с разметкой» с выполнением комплекса действий D12-D18. При этом регулярно определяют продольное рассогласование ведомой машины относительно световой плоскости, управляют движением машины так, чтобы минимизировать продольное рассогласование, по временной задержке приема акустических импульсов относительно соответствующих лазерных импульсов определяют текущее расстояние данной машины от ведущей машины, вычисляют нивелированное значение этого расстояния по заданной совокупности предшествующих аналогичных замеров, определяют рассогласование между нивелированным межмашинным и установочным расстоянием, управляют рулевым механизмом ведомой машины так, чтобы минимизировать ее текущее боковое рассогласование и формируют для оператора внутри и внемашинную индикацию готовности к разметке. Однако ведомая машина, находясь в состоянии «движение с разметкой» начнет перемещаться только одновременно с началом движения ведущей машины, т.е. после формирования оператором ведущей машине команды «движение». Пока в процессе движения ведомой машины она принимает лазерное и акустическое излучение, и ее боковое рассогласование остается в пределах нормы машина остается в состоянии «движение с разметкой». На графе управления это соответствует переходу по условию LUR в то же самое состояние. Если же находясь в состоянии «движение с разметкой» ведомая машина перестает принимать лазерное излучение в течение заданного количества циклов измерения или оператор формирует команду «останов», т.е. возникает условие !LvS, то осуществляется переход в состояние «аварийный останов» с выполнением действия D20. При этом осуществляют останов ведомой машины и формируют внутри и внемашинную аварийную индикацию для оператора и ведущей машины. Если при нахождении ведомой машины в состоянии «аварийный останов» она принимает от ведущей машины только лазерное излучение и не принимает акустическое излучение, то при формировании оператором команды «движение», т.е. возникает условие EL, то осуществляется перевод машины в состояние «движение без разметки» с выполнением действий D12-D13. При этом определяют продольное рассогласование ведомой машины относительно световой плоскости и управляют продольным движением машины так, чтобы минимизировать это рассогласование. Отсутствие приема акустического излучения означает, что боковое рассогласование ведущей машины превышает допустимую норму и следовательно, нет точки отсчета для определения межмашинного расстояния и, таким образом, не представляется возможным определять боковое рассогласование ведомой машины. При таком движении ведомой машины полагают ее боковое рассогласование нулевым, т.е. фактически машина движется с фиксированным рассогласованием, равным значению ее бокового рассогласования непосредственно перед прекращением приема акустического излучения. В состоянии «движение без разметки» машина может продолжать движение не более заданного количества циклов формирования лазерного излучения. На графе управления ведомой машиной такое движение представлено переходом по условию L!UvL!R в тоже самое состояние с выполнением действий D12-D13, D19. Если до окончания указанного интервала времени появляется прием акустического излучения при одновременном боковом рассогласовании ведомой машины в пределах нормы, т.е. создается условие LUR, то машина переходит в состояние «движение с разметкой» с выполнением ранее описанного набора действий D12-D18. Если же в состоянии «движение без разметки» прекращается прием лазерного излучения или заканчивается интервал времени такого движения или оператор формирует команду «останов», т.е. формируется условие !LvS, то осуществляется переход в состояние «аварийный останов» с выполнением действия D20 с остановом машины и формированием внутри и внемашинной аварийной сигнализации. При описании условия этого перехода на графе управления (фиг. 3) учитывается, что формирование аварийной индикации равносильно формированию команды «останов».
Причем период формирования световой плоскости должен быть не меньше времени прохождения акустическим сигналом всей ширины дорожного полотна.
На макроуровне предлагаемая система (фиг. 4) включает в себя следующие блоки на борту ведущей машины:
формирователь световой плоскости (лазерный излучатель с разверткой луча в вертикальной плоскости) 1, линейку активных оптоэлектронных датчиков 2, одноканальный мультиплексор 3, датчик аварийного излучения 4, первый привод торможения 5, дешифратор 6, блок определения бокового рассогласования 7, двухразрядный 8, первый аварийный индикатор-излучатель 9, первый кольцевой счетчик 10, первый сервопривод рулевого механизма 11, первый датчик команд оператора 12, цифровой спидометр 13, первый генератор импульсов 14, первое постоянное запоминающее устройство (ПЗУ) контроля готовности к разметке 15, первый датчик настроек параметров движения 16, первое ПЗУ управления скоростью движения 17, акустический излучатель 18, первый индикатор-излучатель готовности к разметке 19, первый сервопривод скорости движения 20
и следующие блоки на борту ведомой машины:
линейку пассивных оптоэлектронных датчиков 21, датчик акустического излучения 22, второй аварийный индикатор-излучатель 23, второй привод торможения 24, блок определения позиционного рассогласования 25, второй датчик настроек параметров движения 26, первый RS-триггер 27, второй датчик команд оператора 28, второе ПЗУ управления скоростью движения 29, второй сервопривод рулевого механизма 30, второе ПЗУ контроля готовности к разметке 31, первый логический элемент ИЛИ-НЕ 32, второй сервопривод скорости движения 33, второй индикатор-излучатель готовности к разметке 34,
причем применительно к оборудованию ведущей машины: выход первого генератора импульсов 14 соединен с (счетным) входом первого кольцевого счетчика 10, первым входом (синхронизации) блока определения бокового рассогласования 7, а также с первыми входами (синхронизации) формирователя световой плоскости 1 и акустического излучателя 18, линии шины первого (параллельного) выхода первого кольцевого счетчика 10 соединены с одноименными линиями шины входа дешифратора 6, одноименными линиями первого (управляющего) входа одноканального мультиплексора 3 и одноименными линиями второго входа (проверяемого смещения) блока определения бокового рассогласования 7, второй выход (признака нулевого состояния) первого кольцевого счетчика 10 связан с третьим входом (признака начала цикла) блока определения бокового рассогласования 7, линии шины выхода дешифратора 6 соединены с одноименными линиями входной шины (опроса) линейки активных оптоэлектронных датчиков 2, линии (информационной) шины выхода которого связаны с одноименными линиями (информационной) шины второго входа одноканального мультиплексора 3, (информационный) выход которого соединен с четвертым (информационным) входом блока определения бокового рассогласования 7, пятый вход (установочного бокового смещения) которого связан с первым выходом (установочного бокового смещения) первого датчика настроек параметров движения 16, первый выход (признака потери края) блока определения бокового рассогласования 7 соединен с первым входом (сброса) двухразрядного регистра 8, а линии шины второго выхода (бокового рассогласования) связаны с одноименными линиями шины входа первого сервопривода рулевого механизма 11 и одноименными линиями шины первого (адресного) входа первого ПЗУ контроля готовности к разметке 15, линии шины второго выхода (разрешенного бокового рассогласования) соединены с одноименными линиями шины второго (адресного) входа первого ПЗУ контроля готовности к разметке 15, а линии шины третьего выхода (установочной скорости движения) связаны с одноименными линиями шины первого (адресного) входа первого ПЗУ управления скоростью движения 17, первый выход первого ПЗУ контроля готовности к разметке 15 соединен с вторым входом (запрета) акустического излучателя 18, а второй выход (готовности) связан с (управляющим) входом первого индикатора-излучателя готовности к разметке 19, выход датчика аварийного излучения 4 соединен со вторым входом (сброса) двухразрядного регистра 8, линии шины третьего (информационного) входа которого подключены к одноименным линиям шины выхода первого датчика команд оператора 12, линии шины выхода (рассогласования по скорости) первого ПЗУ управления скоростью движения 17 связаны с одноименными линиями шины первого входа первого сервопривода скорости движения 20, линии шины выхода (фактической скорости движения) цифрового спидометра 13 связаны с одноименными линиями шины второго (адресного) входа первого ПЗУ управления скоростью движения 17, 0-линия шины (инверсного) выхода двухразрядного регистра 8 соединена с входом (запрета) датчика аварийного излучения 4, 1-линия шины (инверсного) выхода двухразрядного регистра 8 соединена с входами первого привода торможения 5, первого аварийного индикатора-излучателя 9, вторым входом (блокировки) первого сервопривода скорости движения 20, а также со вторым входом (запрета) формирователя световой плоскости 1 и третьим входом (запрета) акустического излучателя 18,
а применительно к оборудованию ведомой машины: линии шины выхода линейки пассивных оптоэлектронных датчиков 21 соединены с одноименными линиями шины первого входа (положения световой плоскости) блока определения позиционного рассогласования 25, линии шины первого выхода (номера засвеченного датчика) которого связаны с одноименными линиями шины (адресного) входа второго ПЗУ управления скоростью движения 29, линии шины второго выхода (бокового рассогласования) соединены с одноименными линиями шины входа второго сервопривода рулевого механизма 30 и шины первого (адресного) входа второго ПЗУ контроля готовности к разметке 31, выход датчика акустического излучения 22 связан со вторым входом (обнаружения акустического излучения) блока определения позиционного рассогласования 25, линии шины третьего входа (установочного межмашинного расстояния) которого связаны с одноименными линиями шины первого выхода (установочного межмашинного расстояния) второго датчика настроек параметров движения 26, третий выход (потери точки отсчета) блока определения позиционного рассогласования 25 связан с первым входом первого логического элемента ИЛИ-НЕ 32, четвертый выход (потери края шоссе) связан с первым (S) входом первого RS-триггера 27, второй (S) вход и третий (R) вход первого RS-триггера 27 соединены соответственно с первым выходом (команды «останов») и вторым выходом (команды «движение») второго датчика команд оператора 28, (прямой) выход второго RS-триггера 27 связан с входом второго аварийного индикатора-излучателя 23, входом второго привода торможения 24 и вторым входом (блокировки) второго сервопривода скорости движения 33, линии шины второго выхода (разрешенного бокового рассогласования) второго датчика настроек параметров движения 26 связаны с одноименными линиями шины второго (адресного) входа второго ПЗУ контроля готовности к разметке 31, выход которого соединен со вторым входом первого логического элемента ИЛИ-НЕ 32, своим выходом связанного со входом второго индикатора-излучателя готовности к разметке 34.
Блок определения бокового рассогласования 7 (фиг. 5) включает в себя следующие блоки:
аналого-цифровой преобразователь (АЦП) 35, первый регистр 36, второй регистр 37, первый вычитатель 38, первый ждущий блокинг-генератор 39, второй ждущий блокинг-генератор 40, третий ждущий блокинг-генератор 41, ПЗУ сравнения перепадов яркости 42, первый логический элемент И 43, логический элемент НЕ 44, второй логический элемент И 45, третий регистр 46, первый счетчик 47, второй RS-триггер 48, первый многоканальный мультиплексор 49, четвертый регистр 50, второй кольцевой счетчик 51, второй генератор импульсов 52, память FIFO (First Input First Out) замеров боковых смещений 53, первый сумматор-накопитель 54, пятый регистр 55, второй вычитатель 56,
причем первым входом (синхронизации) блока определения бокового рассогласования 7 служат связанные между собой первый вход (синхронизации) АЦП 35, первый вход (записи) первого регистра 36 и вход первого ждущего блокинг-генератора 39, вторым входом (номера опрашиваемого датчика) блока определения бокового рассогласования 7 служат связанные одноименными линиями шина первого (информационного) входа четвертого регистра 50 и шина первого входа первого логического элемента И 43, третьим входом (признака начала цикла) блока определения бокового рассогласования 7 служат связанные между собой вход логического элемента НЕ 44, первый (счетный) вход первого счетчика 47, первый вход (сброса) третьего регистра 46 и второй вход (сброса) четвертого регистра 50, четвертым (информационным) входом блока определения бокового рассогласования 7 служит второй (информационный) вход АЦП 35, пятым входом (установочного бокового смещения) блока определения бокового рассогласования 7 служит первый вход (установочного бокового смещения) второго вычитателя 56, первым выходом (признака потери края шоссе) блока определения бокового рассогласования 7 служит линия старшего разряда шины (информационного) выхода первого счетчика 47, вторым выходом (бокового рассогласования) блока определения бокового рассогласования 7 служит (параллельный) выход пятого регистра 55, выход первого ждущего блокинг-генератора 39 соединен с входом второго ждущего блокинг-генератора 40 и первым входом второго логического элемента И 45, выход второго ждущего блокинг-генератора 40 связан с входом третьего ждущего блокинг-генератора 41, вторым входом (чтения) первого регистра 36 и первым входом (записи) второго регистра 37, линии шины выхода АЦП 35 связаны с одноименными линиями шины третьего (информационного) входа первого регистра 36, линии шины выхода которого связаны с одноименными линиями шины второго (информационного) входа второго регистра 37 и одноименными линиями шины первого входа первого вычитателя 38, линии шины второго входа которого связаны с одноименными линиями шины выхода второго регистра 37, линии шины выхода первого вычитателя 38 связаны с одноименными линиями шины первого (адресного) входа ПЗУ сравнения перепадов яркости 42 и с одноименными линиями шины второго (информационного) входа третьего регистра 46, линии шины выхода которого соединены с одноименными линиями шины второго (адресного) входа ПЗУ сравнения перепадов яркости 42, выход которого связан со вторым входом второго логического элемента И 45, выход третьего ждущего блокинг-генератора 41 соединен со вторым входом первого логического элемента И 43, выход которого связан с первым (S) входом второго RS-триггера 48, первым (управляющим) входом первого многоканального мультиплексора 49 и первым входом (записи) памяти FIFO-замеров боковых смещений 53, выход второго логического элемента И 45 связан с третьим входом (записи) третьего регистра 46, с третьим входом (записи) четвертого регистра 50 и вторым входом (сброса) первого счетчика 47, выход логического элемента НЕ 44 соединен с третьим входом второго логического элемента 45, (прямой) выход второго RS-триггера 48 соединен с входом (включения/выключения) второго генератора импульсов 52, линии шины выхода памяти FIFO- замеров боковых смещений 53 связаны с одноименными линиями шины первого входа первого сумматора-накопителя 54 и шины второго (информационного) входа первого многоканального мультиплексора 49, линии шины третьего (информационного) входа которого связаны с одноименными линиями шины выхода четвертого регистра 50, линии шины выхода первого многоканального мультиплексора 49 связаны с одноименными линиями шины второго (информационного) входа памяти FIFO-замеров боковых смещений 53, выход второго генератора 52 связан с третьим входом (записи) и четвертым входом (чтения) памяти FIFO-замеров боковых смещений 53, (счетным) входом второго кольцевого счетчика 51 и вторым входом (синхронизации) первого сумматора-накопителя 54, выход (переполнения) второго кольцевого счетчика 51 соединен со вторым (R) входом второго RS-триггера 48, первым входом (записи) пятого регистра 55 и вторым входом (синхронизации) второго вычитателя 56, линии группы старших разрядов шины выхода первого сумматора-накопителя 54 связаны с одноименными линиями шины третьего входа (нивелированного бокового смещения) второго вычитателя 56, линии шины выхода которого связаны с одноименными линиями второго (информационного) входа пятого регистра 55.
Блок определения позиционного рассогласования 25 (фиг. 6) включает в себя следующие блоки:
второй логический элемент ИЛИ 57, третий кольцевой счетчик 58, второй сумматор-накопитель 59, шестой регистр 60, сдвиговый регистр 61, третий RS-триггер 62, третий генератор импульсов 63, четвертый генератор импульсов 64, второй счетчик 65, второй многоканальный мультиплексор 66, память FIFO-замеров межмашинных расстояний 67, третий счетчик 68, четвертый RS-триггер 69, пятый генератор импульсов 70, четвертый кольцевой счетчик 71, третий вычитатель 72, седьмой регистр 73,
причем первым входом (положения световой плоскости) блока определения позиционного рассогласования 25 служат связанные между собой одноименными линиями шина входа второго логического элемента ИЛИ 57 и шина первого (параллельного) входа сдвигового регистра 64, вторым входом (признака акустического излучения) блока определения позиционного рассогласования 25 служат связанные между собой первый вход (сброса) второго счетчика, первый (управляющий) вход второго многоканального мультиплексора 66, первый вход (записи) памяти FIFO замеров межмашинных расстояний 67, первый (S) вход четвертого RS-триггера 69 и первый вход (сброса) второго сумматора-накопителя 59, третьим входом (установочного межмашинного расстояния) блока определения позиционного рассогласования 25 служит шина первого (информационного) входа третьего вычитателя 72, первым выходом (номера засвеченного датчика) блока определения позиционного рассогласования 25 служит шина (информационного) выхода шестого регистра 60, вторым выходом (бокового рассогласования) блока определения позиционного рассогласования 25 служит шина выхода третьего вычитателя 72, третьим выходом (признака потери точки отсчета) блока определения позиционного рассогласования 25 служит линия старшего разряда шины первого (параллельного) выхода второго счетчика 65, четвертым выходом (признака потери края шоссе) блока определения позиционного рассогласования 25 служит выход (переполнения) третьего счетчика 68, выход (признака регистрации лазерного излучения) второго логического элемента ИЛИ 57 связан с первым входом (сброса) третьего кольцевого счетчика 58, со вторым входом (записи) сдвигового регистра 61, первым (S) входом третьего RS-триггера 62, вторым входом (сброса) второго счетчика 65 и первым входом (сброса) третьего счетчика 68, выход сдвигового регистра 61 связан со вторым (R) входом третьего RS-триггера 62 и первым входом (записи) шестого регистра 60, линии шины второго (информационного) входа которого связаны с одноименными линиями шины (информационного) выхода третьего кольцевого счетчика 58, (прямой) выход третьего RS-триггера 62 связан с входом (включения/выключения) третьего генератора импульсов 63, выход которого соединен с третьим входом (сдвига) сдвигового регистра 61 и вторым (счетным) входом третьего кольцевого счетчика 58, выход четвертого генератора импульсов 64 соединен с третьим (счетным) входом второго счетчика 65 и вторым (счетным) входом третьего счетчика 68, линии шины второго (информационного) выхода второго счетчика 65 связаны с одноименными линиями шины второго (информационного) входа третьего многоканального мультиплексора 66, линии шины выхода которого связаны с одноименными линиями шины второго (информационного) входа памяти FIFO-замеров межмашинных расстояний 67, линии шины выхода которой связаны с одноименными линиями шины третьего (информационного) входа второго многоканального мультиплексора 66 и с одноименными линиями шины второго (информационного) второго сумматора-накопителя 59, (прямой) выход четвертого RS-триггера 69 связан с входом (включения/выключения) пятого генератора импульсов 70, выход которого связан со (счетным) входом четвертого кольцевого счетчика 71, третьим входом (синхронизации) второго сумматора-накопителя 59, а также третьим входом (чтения) и четвертым входом (записи) памяти FIFO замеров межмашинных расстояний 67, выход (переполнения) четвертого кольцевого счетчика 71 связан со вторым (R) входом четвертого RS-триггера 69 и первым входом (записи) седьмого регистра 73, линии шины второго входа (нивелированного замера межмашинного расстояния) которого связаны с одноименными линиями группы старших разрядов шины выхода второго сумматора-накопителя 59, линии шины выхода седьмого регистра 73 связаны с одноименными линиями шины второго входа (нивелированного замера межмашинного расстояния) третьего вычитателя 72.
На макроуровне (фиг. 4) устройство управления ведущей машины, как часть заявляемой системы, работает следующим образом. Питание устройства подается после ручной установки машины в исходное состояние. При этом двухразрядный регистр 8 устанавливается в нулевое состояние. Соответствующие цепи для простоты здесь не описаны. На (инверсных) 0- и 1-линиях шины выхода двухразрядного регистра 8 в это время формируются единичные сигналы. Единичный сигнал с 0-линии шины выхода двухразрядного регистра 8 подается на вход (запрета) датчика аварийного излучения 4 и тем самым блокирует его работу. Единичный сигнал с 1-линии шины выхода двухразрядного регистра 8 поступает на вход первого привода торможения 5, вход первого аварийного индикатора-излучателя 9, второй вход (блокировки) первого сервопривода скорости движения 20 и вторые входы (запрета) формирователя световой плоскости 1 и акустического излучателя 18. В результате в это время оказываются включенными привод торможения 5 и первый аварийный индикатор-излучатель 9, выключенными формирователь световой плоскости 1 и акустический излучатель 18, блокирован первый сервопривод скорости движения 20. Поэтому в этом режиме, называемом «аварийный останов», ведущая машина стоит на месте и не управляет коллективом ведомых дорожных машин. Одновременно с момента включения питания синхроимпульсы с выхода первого генератора импульсов 14 регулярно подаются на первый (счетный) вход первого кольцевого счетчика 10, на первый вход (синхронизации) блока определения бокового смещения 7, а также на первые входы (синхронизации) формирователя световой плоскости 1 и акустического излучателя 18. В результате формирователь световой плоскости 1 и акустический излучатель 18 пока не работают из-за наличия единичных сигналов на их вторых входах (запрета). Первый кольцевой счетчик 10 осуществляет подсчет входных импульсов и двоичный код суммы по шине своего первого выхода подает на входную шину дешифратора 6, шину первого (управляющего) входа одноканального мультиплексора 3 и шину второго входа (перечисляемых состояний) блока определения бокового рассогласования 7. При прохождении первым кольцевым счетчиком 10 нулевых состояний на его втором выходе (признака начального состояния) формируется единичный сигнал, который поступает на третий вход (признака начального состояния) блока определения бокового рассогласования 7. Дешифратор 6 формирует унитарные коды на шине входа линейки активных оптоэлектронных датчиков 2. Таким образом осуществляется циклическая поочередная активация и опрос всех датчиков линейки активных оптоэлектронных датчиков 2, аналоговые сигналы с которых через одноканальный мультиплексор 3 проходят на четвертый информационный вход блока определения бокового рассогласования 7, который по наибольшему перепаду амплитуд сигналов от смежных оптоэлектронных датчиков линейки 2 определяет текущее боковое смещение ведущей машины относительно правого края дорожного полотна и непрерывно выдает двоичный код этого значения по шине своего второго (информационного) выхода. Указанный код поступает на шину входа первого сервопривода рулевого механизма 11 и шину входа (фактического бокового рассогласования) первого ПЗУ контроля готовности к разметке 15. Пока ведущая машина находится в состоянии «аварийный останов» ее боковое рассогласование остается неизменным, полученным в процессе ручной начальной установки ведущей машины или сформировавшимся к моменту ее аварийной остановки. В это время первое ПЗУ контроля готовности к разметке 15 сопоставляет фактическое текущее боковое рассогласование ведущей машины с допустимым установочным рассогласованием, и в случае не превышения последнего формирует единичный сигнал на своем выходе, который поступает на вход первого индикатора-излучателя готовности к разметке 19 и тем самым включает его. Для оператора отсутствие сигнала первого индикатора-излучателя готовности к разметке 19 означает необходимость более точной ручной переустановки ведущей машины до появления указанного сигнала. Если блок определения бокового рассогласования 7 «не видит» края дорожного полотна, то на его первом выходе формируется единичный сигнал, который поступает на первый вход (сброса) двухразрядного регистра 8 и не дает возможность оператору запустить процесс автоматического вождения бригады разметочных машин, пока оператор ручным образом не передвинет ведущую машину до «появления видимости» края дорожного полотна в блоке определения бокового рассогласования 7. Чтобы активировать ведущую машину оператор должен в первом датчике настроек параметров движения 16, например, посредством установки в соответствующее положение тумблеров задать в двоичной форме по шинам первого выхода сигналы установочного бокового смещения, второго выхода сигналы допустимой ошибки бокового смещения и третьего выхода сигналы установочной скорости движения. После этого оператор должен в первом датчике команд оператора 12, например, посредством нажатия соответствующей кнопки сформировать команду «подготовка», по которой на шине его выхода формируется код 01. Этот код подается на третий (информационный) вход двухразрядного регистра 8 и переводит его в состояние 01, называемое «подготовительный останов». Теперь на (двухразрядном инверсном) выходе двухразрядного регистра 8 формируется код 10, то есть формируется нулевой сигнал на 0-линии и единичный сигнал на 1-линии его (инверсного) выхода. В результате снимается запрет с работы датчика аварийного излучения 4. В таком состоянии на первый и второй входы (сброса) двухразрядного регистра 8 подаются нулевые сигналы, поскольку ведущая машина предварительно была установлена так, чтобы она «видела» правый край дорожного полотна, а ведомые машины еще не были установлены и следовательно, не могли излучать аварийный сигналы. В итоге ведущая машина хотя и остается без движения, но подготовлена к движению. Перед формированием команды «движение» для ведущей машины оператором должны быть установлены в состояние «аварийный останов» (рис. 3) все ведомые машины управляемого коллектива. При этом все ведомые машины устанавливаются приблизительно на одной с ведущей машиной поперечной линии и каждая ведомая машина устанавливается правым маркером на позицию своей будущей разметочной линии, в их вторых датчиках настройки параметров движения 26 устанавливают, например, с помощью переключателей на шине первого выхода в двоичном коде расстояние в сантиметрах до разметочной полосы ведущей машины, а на шине второго выхода допустимую ошибку смещения также в сантиметрах, после чего включается питание их устройств управления и вторых выходах (команды пуска) вторых датчиков команд пуска/пуска 28 формируются импульсные единичные сигналы пуска. Если какая-либо из ведомых машин устанавливается с боковым смещением превышающим допустимое боковое смещение, то срабатывает ее аварийный индикатор/излучатель 23 и данная ведомая машина переустанавливается до его выключения. После начальной установки всех ведомых машин оператор, например, посредством нажатия соответствующей кнопки формирует на шине своего выхода первого датчика команд оператора 12 команду «движение» в виде кода 11, который поступает на третий вход двухразрядного регистра 8 и переводит его в состояние 11. В результате на шине (инверсного выхода) двухразрядного регистра 8 формируется код 00, по которому снимается запрет с работы датчика аварийного излучения 4, освобождается первый привод торможения 5, выключается первый аварийный индикатор/излучатель 9, включается в работу формирователь световой плоскости 1 и акустический излучатель 18, а на шине выхода первого ПЗУ управления скоростью движения 17 формируется двоичный код рассогласования (табл. 2), который поступает на вход первого сервопривода скорости движения 20 и принуждает ведущую машину к движению. В процессе движения ведущей машины с одной стороны в блоке определения бокового рассогласования 7 регулярно осуществляется оценка бокового рассогласования ведущей машины относительно теоретической правой полосы ограничения дорожного полотна и это рассогласование минимизируется с помощью первого сервопривода рулевого механизма 11, а с другой стороны одновременно в первом ПЗУ управления скоростью движения 17 определяется текущее рассогласование между текущей и установочной скоростью движения ведущей машины и с помощью первого сервопривода скорости движения 20 это рассогласование также минимизируется. Если в процессе описанного движения ведущей машины ее боковое отклонение начинает превышать допустимое отклонение, то на это время выключается первый индикатор-излучатель готовности к разметке 19 и дальнейшие действия, например, в виде временного выключения маркера при сохранении движения ведущей машины или ее останов, как при завершении разметочных работ, посредством формирования команды «останов» определяются оператором. В последнем случае оператор формирует, например, посредством нажатия соответствующей кнопки на шине выхода первого датчика команд оператора 12 двоичного кода 00, который поступает на шину третьего (информационного) входа двухразрядного регистра 8 и переводит его в ранее описанное состояние «аварийный останов» 00. В состояние «аварийный останов» ведущая машина может перейти также по единичным сигналам с первого выхода (потери края шоссе) блока определения бокового рассогласования 7 или с выхода датчика аварийного излучения 4 от ведомых машин, которые поступают, соответственно, на первый и второй входы (сброса) двухразрядного регистра 8 и переводят его состояние 00.
На макроуровне (фиг. 4) устройство управления ведомой машины, как часть заявляемой системы, работает следующим образом. Все ведомые машины ручным образом устанавливаются в начальное положение во время нахождения ведущей машины в состоянии «подготовительный останов». Этот процесс ранее описан. Далее работу устройства управления будем рассматривать на примере одной ведомой машины. Питание устройства управления ведомой машины оператор включает после ее ручной установки. При этом первый RS-триггер 27 автоматически устанавливается в единичное состояние (цепи начальной установки здесь для простоты не описаны). При этом единичный сигнал с (прямого) выхода RS-триггера 27 поступает на вход второго аварийного индикатора-излучателя 4, вход второго привода торможения 24 и второй вход (блокировки) второго сервопривода скорости 33. Ведущая машина находится в состоянии «останов» с включенным вторым аварийным индикатором-излучателем 23. Для активации ведущей машины оператор должен, например, посредством нажатия соответствующей кнопки сформировать команду «движение», по которой на втором выходе второго датчика команд оператора 28 формируется единичный сигнал. Этот сигнал поступает на третий (R) вход RS-триггера 27 и переводит его в нулевое состояние. При этом гаснет второй аварийный индикатор-излучатель 23, освобождается второй привод торможения 24 и снимается блокировка со второго сервопривода скорости движения 33. Линейка пассивных оптоэлектронных датчиков 21 и датчик акустического излучения 22 начинают принимать, соответственно, лазерное импульсное излучение от формирователя световой плоскости 1 и акустические импульсы от акустического излучателя 18. Поскольку лазерное излучение сформировано в виде вертикальной плоскости, то изо всех пассивных оптоэлектронных датчиков линейки 21 это импульсное излучение каждый раз будут воспринимать лишь несколько из них, номера которых образуют некоторый интервал на множестве всех номеров датчиков линейки пассивных оптоэлектронных датчиков 21. На выходной шине рассматриваемой линейки датчиков единичные сигналы будут появляться лишь на линиях, соответствующих оговоренным датчикам и далее они будут попадать по первому входу в блок определения позиционного рассогласования 25. Одновременно на выходе акустического датчика 22 будут регулярно появляться с некоторой задержкой по времени относительно лазерных импульсов единичные импульсные сигналы, которые будут поступать на второй вход блока определения позиционного рассогласования 25. Одновременно по третьему входу в блок определения позиционного рассогласования 25 из второго датчика настроек параметров движения 26 постоянно поступает установочное межмашинное расстояние. Блок определения позиционного рассогласования 25 определяет величину линейного отклонения середины линейки пассивных оптоэлектронных датчиков 21 данной ведомой машины от световой плоскости и в форме параллельного двоичного кода выдает это значение по своему первому выходу на (адресный) вход второго ПЗУ управления скоростью движения 29 (табл. 3). На выходе второго ПЗУ управления скоростью движения 29 в форме двоичного кода формируется скоростное рассогласование этой машины, которое поступает первый вход (рассогласования) второго сервопривода скорости движения 33. Этот сервопривод так управляет скоростью ведомой машины, чтобы минимизировать рассматриваемое линейное рассогласование. Одновременно блок определения позиционного рассогласования 25 на основе определения величины временной задержки акустических импульсов относительно одноименных лазерных импульсов формирует в двоичной форме на шине своего второго выхода боковое рассогласование данной ведомой машины, который поступает на вход второго сервопривода рулевого механизма 30, а его абсолютное значение на шину первого входа второго ПЗУ контроля готовности к разметке 31. Назначение, содержимое и смысл адресных входов этой памяти полностью идентично первой ПЗУ контроля готовности к разметке 15. Второй сервопривод рулевого механизма 30 так управляет положением рулевых колес ведомой машины, чтобы в процессе ее движения минимизировать боковое рассогласование. Одновременно, если боковое рассогласование не превышает допустимое значение, то на выходе второго ПЗУ контроля готовности к разметке 31 формируется нулевой сигнал, который проходя через первый логический элемент ИЛИ-НЕ приобретает единичное значение, и включает второй индикатор-излучатель готовности к разметке 34. Если боковое рассогласование ведомой машины начинает превышать допустимое значение, то на выходе второго ПЗУ контроля готовности к разметке 31 формируется единичное значение, которое приводит к погасанию второго индикатора-излучателя 34. Погасание второго индикатора-излучателя 34 может быть вызвано также появлением единичного сигнала на третьем выходе (потери точки отсчета) блока определения позиционного рассогласования 25, который проходя через первый логический элемент ИЛИ-НЕ 32, преобразуется в нулевой сигнал на входе второго индикатора-излучателя. В такой ситуации оператор может либо отключить временно маркер в расчете, что через небольшое время ситуация с боковым рассогласованием сама нормализуется, либо оператор, например, нажатием соответствующей кнопки в датчике команд движение/останов 28 может сформировать на его первом выходе единичный сигнал (команду «останов»), который попадая на второй (S) вход первого RS-триггера 27 переводит его в единичное состояние. Тогда на (прямом) выходе первого RS-триггера 27 формируется единичный сигнал, который поступает на вход второго аварийного индикатора-излучателя 23, вход второго привода торможения 24 и второй вход (блокировки) второго сервопривода скорости движения 33. Тогда данная ведомая машина останавливается и загорается ее второй аварийный индикатор/излучатель 23, а второй индикатор-излучатель готовности к разметке 34 гаснет. Вслед за этим останавливается и ведущая машина, которая улавливает аварийное излучение ведомой машины. Команда «останов» ведомой машине может также формироваться автоматически по единичному сигналу на четвертом выходе блока определения позиционного рассогласования 25 в случае «потери края дороги» и, соответственно, прекращении регулярного приема по своему второму входу единичных сигналов от акустического датчика 22. Этот сигнал по первому (S) входу также переводит первый RS-триггер 27 в единичное состояние с ранее описанными последствиями. В такой ситуации оператор должен ручным образом переустановить машины, приведшие к аварийной ситуации. Эти машины оператор может легко выявить по текущему виду их индикаторов- излучателей.
Блок определения бокового рассогласования 7 (фиг. 5), являющийся компонентом устройства управления ведущей машины, работает следующим образом. При включении питания все элементы с памятью, а именно, первый 36, второй 37, третий 46, четвертый 50, пятый 55 регистры, первый 47 и второй кольцевой 51 счетчики, память FIFO-замеров боковых смещений 53 автоматически устанавливаются в исходное нулевое состояние (цепи начальной установки для простоты не описаны). В процессе регулярного поочередного опроса активных оптоэлектронных датчиков линейки 35 в блок определения бокового рассогласования 7 по первому входу поступают синхроимпульсы, по второму входу поступают номера опрашиваемых датчиков, по третьему входу поступают единичные сигналы, обозначающие начало каждого цикла опроса, а по четвертому входу аналоговые значения амплитуд принимаемых рассматриваемыми датчиками сигналов. Сигнал синхронизации поступает на первый вход (синхронизации) АЦП 35, первый вход (записи) первого регистра 36 и вход первого ждущего блокинг-генератора 39. Одновременно аналоговые сигналы от рассматриваемых датчиков поступают на второй (информационный) вход АЦП 35. В результате АЦП 35 преобразует каждый такой сигнал датчика в двоичный код, который записывается в первый регистр 36. По заднему фронту сигнала синхронизации запускается первый ждущий блокинг-генератор 39, выходной сигнал которого поступает на вход второго ждущего блокинг-генератора 40 и первый вход второго логического элемента И 45. Одновременно оцифрованный замер амплитуды сигнала от очередного опрашиваемого активного оптоэлектронного датчика линейки 4 с выхода первого регистра 36 поступает на первый вход первого вычитателя 38, на второй вход которого с выхода второго регистра 37 поступает аналогично оцифрованный замер с предыдущего соседнего датчика линейки 4. На выходе первого вычитателя 38 формируется параллельный код перепада амплитуд указанных сигналов, который поступает на первый (адресный) вход ПЗУ сравнения перепадов яркости 42 и на первый (информационный) вход третьего регистра 46. На второй (адресный) вход ПЗУ сравнения перепадов яркости 42 в это время поступает параллельный код сохраненного максимального из ранее обнаруженных перепадов амплитуд сигналов в очередном цикле опроса линейки активных оптоэлектронных датчиков 4. Если значение кода на первом (адресном) входе ПЗУ сравнения перепадов яркости 42 оказывается больше значения кода на его втором (адресном) входе, то на его выходе формируется единичный сигнал, который поступает на второй вход второго логического элемента И 45. Одновременно, если очередной опрашиваемый датчик линейки 4 имеет номер, отличный от нуля, то с выхода логического элемента НЕ 44 на третий вход второго логического элемента 45 поступает единичный сигнал. В результате на выходе второго логического элемента И 45 формируется единичный сигнал, который поступает на третьи входы (записи) третьего 46 и четвертого 50 регистров и второй вход (сброса) первого счетчика 47. Производится обновление содержимого третьего 46 и четвертого 50 регистров и осуществляется обнуление первого счетчика 47. Получается так, что в третьем регистре 46 запоминается значение наибольшего перепада амплитуд выходных сигналов смежных датчиков на всем множестве опрошенных в данном цикле к текущему моменту датчиков линейки 4, а четвертом регистре 50 сохраняется номер оптоэлектронного датчика линейки 4 на котором этот перепад произошел. Во время формирования единичного сигнала на выходе второго ждущего блокинг-генератора 40, который поступает на второй вход (чтения) первого регистра 36 и первый вход (записи) второго регистра 37 и вход третьего ждущего блокинг-генератора 41. Происходит копирование содержимого первого регистра 36 во второй регистр 37, что, как описано выше, используется при определении величин перепадов сигналов с выходов датчиков линейки 4. Во время нахождения третьего ждущего блокинг-генератора 41 в единичном состоянии при опросе любого не последнего датчика линейки 4 происходит вышеописанное определение перепада амплитуды выходного сигнала этого датчика относительно выходного сигнала предыдущего датчика линейки 4, сравнение этого значения с сохраненным значением перепада в третьем регистре 46 и, в случае превышения первого, происходит обновление содержимого третьего 46 и четвертого 50 регистров. В итоге, к моменту завершения цикла опроса всех датчиков линейки 4 в третьем регистре 46 откладывается наибольшее значение перепада сигналов на всем множестве пар смежных датчиков линейки активных оптоэлектронных датчиков 4, а в четвертом регистре 50 откладывается номер датчика на котором этот перепад имеет место. При этом во время нахождения третьего ждущего блокинг-генератора 41 в единичном состоянии при опросе последнего датчика линейки 4 на выходе первого логического элемента 43 формируется единичный сигнал, который поступает на первый (S) вход второго RS-триггера 48, первый (управляющий) вход первого многоканального мультиплексора 49 и первый вход (записи) первой памяти FIFO 53. Происходит взведение второго RS-триггера 48 в единичное состояние, подключение через первый многоканальный мультиплексор 49 выхода четвертого регистра 50 ко второму (информационному) входу памяти FIFO-замеров боковых смещений 53 и осуществляется запись в конец очереди данных указанной памяти с удалением из памяти первого элемента очереди. В качестве элементов очереди данных выступают значения наибольших перепадов амплитуд сигналов от линейки активных оптоэлектронных датчиков 4 в заданном количестве предыдущих циклов ее опроса. Одновременно с (прямого) выхода второго RS-триггера 48 единичный сигнал поступает на вход (включения/выключения) второго генератора импульсов 58 и включает его. Импульсы с выхода второго генератора импульсов 58 поступают на третий вход (записи) и четвертый вход (чтения) памяти FIFO-замеров боковых смещений 53, а также на (счетный) вход второго счетчика 51, второй вход (синхронизации) первого сумматора-накопителя 54 и вход (записи) пятого регистра 55. Происходит повторение действий по одновременному чтению с выталкиванием элемента данных из головы очереди данных памяти FIFO-замеров боковых замеров 53 и запись его в конец этой очереди. Читаемые из указанной памяти данные последовательно поступают по шине первого (информационного) входа в первый сумматор-накопитель 54, где они суммируются. Одновременно во втором кольцевом счетчике 51 каждый акт чтения памяти FIFO-замеров боковых смещений 53 отмечается увеличением на единицу его содержимого. Поскольку коэффициент пересчета этого счетчика равен размеру памяти FIFO-замеров боковых замеров 53 и равен целой степени двойки, то к моменту появления на выходе (переполнения) второго кольцевого счетчика 51 сигнала переполнения очередь данных в памяти FIFO-замеров боковых смещений 53 примет тот же вид, что был до включения второго генератора импульсов 52 и в первом сумматоре-накопителе 54 будет вычислена сумма значений всех элементов рассматриваемой очереди данных, а группа его старших разрядов будет представлять нивелированное (усредненное) значение указанной суммы. Нивелирование замеров боковых замеров обеспечивает плавность траектории движения ведущей машины, а следовательно и наносимых разметочных линий, несмотря на изрезанность края дорожного полотна. Единичный сигнал с выхода второго кольцевого счетчика 51 поступает на второй (R) вход второго RS-триггера, сбрасывая его в нулевое состояние и тем самым выключая второй генератор импульсов 55, и на второй вход (синхронизации) второго вычитателя 56, вызывая вычисление рассогласования между установочным боковым смещением ведущей машины и реальным нивелированным боковым смещением. С выхода второго вычитателя 56 код бокового рассогласования поступает на второй (информационный) вход пятого регистра 55, где сохраняется до обновления в следующем цикле опроса линейки активных оптоэлектронных датчиков 4 и представляется для использования в устройстве управления ведущей машины. На этом очередной цикл опроса линейки активных оптоэлектронных датчиков 4 заканчивается и следующий синхроимпульс по первому входу блока определения бокового рассогласования 7 начнет следующий аналогичный цикл опроса указанной линейки датчиков 4. До полного формирования очереди боковых замеров в памяти FIFO-замеров боковых смещений 53 блок определения бокового рассогласования 7 будет давать искаженные значения, но это будет иметь место кратковременно, лишь во время нахождения ведущей машины в состоянии «подготовительный останов».
Блок определения позиционного рассогласования 25, являющийся компонентом устройства управления ведомой машины, работает следующим образом. При включении питания все элементы с памятью, а именно, третий кольцевой счетчик 58, шестой регистр 60, сдвиговый регистр 61, третий RS-триггер 62, второй счетчик 65, память FIFO-замеров межмашинных расстояний 67, третий счетчик 68, четвертый RS-триггер 69, четвертый кольцевой счетчик 71 и седьмой регистр 73 автоматически устанавливаются в исходное нулевое состояние (цепи начальной установки здесь для простоты не описаны). По шине первого входа этого блока в него поступает параллельный код, в котором каждый разряд соответствует выходному сигналу одного датчика линейки пассивных датчиков 21. По второму входу поступают импульсные сигналы от датчика акустического излучения 22. По шине третьего входа поступает параллельный двоичный код, представляющий установочное межмашинное расстояние для данной ведомой машины. На первом выходе блока определения позиционного рассогласования 25 формируется значение номера засвеченного датчика линейки пассивных оптоэлектронных датчиков 21, на втором выходе ее формируется значение текущего бокового рассогласования. На третьем выходе формируется признак потери точки отсчета. На четвертом выходе формируется признак потери края шоссе. В момент обнаружения очередного импульса световой плоскости линейкой пассивных оптоэлектронных датчиков 21 по шине входа во второй логический элемент ИЛИ 37 поступает параллельный код, представляющий результаты ее чтения. Одновременно тот же код поступает на первый (параллельный) вход сдвигового регистра 61. Поскольку при обнаружении световой плоскости в принимаемом параллельном коде присутствует, по крайней мере, одна единица, то на выходе второго логического элемента ИЛИ 37 формируется единичный сигнал. Этот сигнал поступает первый вход (сброса) третьего кольцевого счетчика 58, второй вход (записи) сдвигового регистра 61, первый (S) вход третьего RS-триггера 62, второй вход (сброса) второго счетчика 65 и первый вход (сброса) третьего счетчика 68. В результате происходит запись в сдвиговый регистр 61 результатов чтения линейки пассивных оптоэлектронных датчиков 21, переходит в единичное состояние третий RS-триггер 62 и осуществляется обнуление третьего кольцевого счетчика 58, второго 65 и третьего 68 счетчиков. Единичный сигнал с (прямого) выхода третьего RS-триггера 62 включает третий генератор импульсов 63, импульсы с выхода которого поступают на второй (счетный) вход третьего кольцевого счетчика 58 и третий вход (сдвига) сдвигового регистра 61. Происходит поразрядный сдвиг вправо содержимого сдвигового регистра 61 и одновременно подсчет количества реализуемых сдвигов в третьем кольцевом счетчике 58. При появлении на выходе сдвигового регистра 61 единичного сигнала, он поступает на второй (R) вход третьего RS-триггера и первый вход (записи) шестого регистра 60. Третий RS-триггер 62 сбрасывается в нулевое состояние и выключает тем самым третий генератор импульсов 63, а накопленное к этому моменту в третьем кольцевом счетчике 58 значение, отражающее положение пятна световой плоскости на линейке пассивных оптоэлектронных датчиков 21 записывается в шестой регистр 60 и становится доступным для использования в устройстве управления ведомой машины. Обновление содержимого шестого регистра 60 происходит каждый раз с восприятием линейкой пассивных оптоэлектронных датчиков 21 импульса лазерного излучения. Четвертый генератор импульсов 64 служит как для определения времени задержки сигналов от акустического датчика 22 на втором входе блока определения позиционного рассогласования 25 относительно лазерных сигналов на его первом входе, так и для выявления аварийных ситуаций пропадания или потери световой плоскости. Последнее обеспечивается постоянным счетом в третьем счетчике 68 импульсов четвертого генератора импульсов 64 и регулярным сбросом указанного счетчика сигналами с выхода второго логического элемента 57. Если появление лазерного сигнала прекращается по причине аварийного останова ведущей машины или «потери» ведомой машиной световой плоскости, то происходит наполнение третьего счетчика 68 и появление единичного сигнала на его выходе (переполнения), а следовательно, и появление единичного сигнала на четвертом выходе (признака потери края шоссе) блока определения позиционного рассогласования 25. Временная задержка акустического сигнала относительно соответствующего лазерного сигнала, которая отражает текущее межмашинное расстояние, определяется на основе подсчета количества импульсов четвертого генератора импульсов 64 во втором счетчике 65 с момента его обнуления по лазерному сигналу до появления одноименного акустического сигнала. Единичный сигнал от акустического датчика 22 поступает на первый (управляющий) вход второго многоканального мультиплексора 66, первый вход (записи) памяти FIFO-замеров межмашинных расстояний 67, первый (S) вход четвертого RS-триггера 69 и первый вход (сброса) второго сумматора- накопителя 59. В итоге содержимое второго счетчика 65 через второй многоканальный мультиплексор 66 запишется в конец очереди данных памяти FIFO- замеров межмашинных расстояний 67 с выталкиванием головного элемента данных из ее очереди данных. Одновременно перейдет в единичное состояние четвертый RS-триггер 69 и сбрасывается в нулевое состояние второй сумматор-накопитель 59. По единичному сигналу с (прямого) выхода четвертого RS-триггера 69 включается пятый генератор импульсов 70. По заднему фронту сигнала от акустического датчика на первом входе (сброса) второй счетчик 65 обнуляется. Импульсы с выхода пятого генератора импульсов 70 поступают на третий вход (чтения) и четвертый вход (записи) памяти FIFO-замеров межмашинных расстояний 67, а также на (счетный) вход четвертого счетчика 71 и третий вход (синхронизации) второго сумматора-накопителя 59. Происходит повторение действий по одновременному чтению с выталкиванием элемента данных из головы очереди данных памяти FIFO-замеров межмашинных замеров 67 и запись его в конец этой очереди. Читаемые из указанной памяти данные последовательно поступают по шине второго (информационного) входа во второй сумматор-накопитель 59, где они суммируются. Одновременно в четвертом кольцевом счетчике 71 каждый акт чтения памяти FIFO-замеров межмашинных расстояний 67 отмечается увеличением на единицу его содержимого. Поскольку коэффициент пересчета этого счетчика равен размеру памяти FIFO-замеров межмашинных расстояний 67 и равен целой степени двойки, то к моменту появления на выходе (переполнения) четвертого кольцевого счетчика 71 единичного сигнала очередь данных в памяти FIFO-замеров межмашинных расстояний 67 примет тот же вид, что был до включения пятого генератора импульсов 70 и во втором сумматоре-накопителе 59 будет вычислена сумма значений всех элементов рассматриваемой очереди данных, а группа его старших разрядов будет представлять нивелированное (усредненное) значение указанной суммы. Нивелирование замеров межмашинных замеров обеспечивает плавность траектории движения ведомой машины, а следовательно и наносимых разметочных линий. Единичный сигнал с выхода (переполнения) четвертого кольцевого счетчика 71 поступает на второй (R) вход четвертого RS-триггера 69, сбрасывая его в нулевое состояние и тем самым выключая пятый генератор импульсов 70, и на первый вход (записи) седьмого регистра 73, записывая в него реальное нивелированное межмашинное расстояние, которое представляется группой старших разрядов второго сумматора-накопителя 59. Наконец, в третьем вычитателе 72 вычисляется боковое рассогласование ведомой машины, как разность между установочным и реальным нивелированным межмашинным расстояние, которое по второму выходу блока определения позиционного рассогласования предоставляется для использования устройству управления ведомой машины. Пропадание сигналов акустических импульсов по второму входу блока определения позиционного рассогласования 25 при наличии сигналов лазерных импульсов на его первом входе, что происходит при боковом рассогласовании ведущей машины более заданной величины, приводит к прекращению сброса второго счетчика 65 по его первому входу (сброса), его переполнению и появлению на его втором выходе, а следовательно и на третьем выходе (потери точки отсчета) блока определения позиционного рассогласования 25, единичного сигнала. Новое определение бокового рассогласования ведомой машины осуществляется с каждой регистрацией одноименных импульсов лазерного и акустического излучений. Пропадание сигналов лазерных импульсов по первому входу блока определения позиционного рассогласования 25, что возникает при аварийном останове ведущей машины, приводит к прекращению регулярного сброса третьего счетчика 68, его переполнению и появлению единичного сигнала на его выходе (переполнения), а следовательно, и на четвертом выходе блока определения позиционного рассогласования 25.
Первое 15 и второе 31 ПЗУ контроля готовности к разметке имеют одинаковое содержимое, представленное табл.1, где активными адресами считаются адреса с единичным содержимым соответствующих слов. По остальным адресам в указанных ПЗУ размещены нулевые значения. По первому (адресному) входу указанных ПЗУ в сантиметрах перечисляются все возможные по абсолютной величине значения фактического рассогласования, удовлетворяющие перечисляемым по второму (адресному) входу в диапазоне от 5 до 15 см возможным установочным значениям допустимого бокового рассогласования ведущей машины. При этом допустимое боковое рассогласование в 5 см. полагается для главных магистралей, а большие значения для второстепенных дорог.
В предположении диапазона возможных установочных скоростей ведущей машины от 5 км/час до 10 км/час, а фактических ее скоростей от 0 до 15 км/час значимое содержимое первого ПЗУ управления скоростью движения 17 представляется табл. 2, где формируемое табличным образом скоростное рассогласование представляется значением с левым знаковым разрядом. По незначимым, то есть реально неиспользуемым адресам ПЗУ, не указанным в табл. 2, в рассматриваемой памяти записаны нулевые значения,
В предположении 128 датчиков в составе линейки пассивных оптоэлектронных датчиков 21 и диаметре лазерного луча формирователя световой плоскости 1 не меньшем шага размещения датчиков в указанной линейке, содержимое второго ПЗУ управления скоростью движения представляется табл. 3. В качестве адресного пространства этой памяти рассматривается совокупность номеров датчиков в двоичном представлении, а качестве выходных данных полагается, представленные в прямом двоичном коде со знаком, смещения этих датчиков относительно середины указанной линейки.
В предположении 16 градаций цифрового сигнала на выходе АЦП 35 перечень активных адресов ПЗУ сравнения изменения интенсивности 42 представляется табл.4, где активными адресами считаются адреса с единичным содержимым соответствующих слов. По остальным адресам в указанном ПЗУ размещены нулевые значения.
Работоспособность заявляемой системы обеспечивается при соблюдении следующих конструктивных условий:
- шаг размещения датчиков в линейке активных оптоэлектронных датчиков 2 не больше требуемой точности проведения линий разметки;
- диаметр лазерного луча формирователя световой плоскости 1 не меньше шага размещения датчиков в линейке пассивных оптоэлектронных датчиков 21;
- период следования импульсов первого генератора импульсов 14 не меньше времени прохождения акустическим сигналом всей ширины дорожного полотна;
- коэффициент пересчета второго кольцевого счетчика 51, размер памяти FIFO-замеров боковых смещений 53 и отношение рабочей частоты второго генератора импульсов 52 к частоте первого генератора импульсов 14 равны между собой и равны целой степени двойки;
- период следования импульсов четвертого генератора импульсов 64 не больше времени прохождения акустическим сигналом расстояния, равного требуемой точности измерения отклонений линий разметки;
- отношение рабочей частоты третьего генератора импульсов 63 к частоте первого генератора импульсов 14 должно быть не меньше равных между собой количеству датчиков в линейке пассивных оптоэлектронных датчиков 21 и количеству разрядов в сдвиговом регистре 61;
- коэффициент пересчета четвертого кольцевого счетчика 71, размер памяти FIFO-замеров межмашинных расстояний 67 и отношение рабочей частоты пятого генератора импульсов 70 к частоте первого генератора импульсов 14 равны между собой и равны целой степени двойки.
С учетом оговоренных выше конструктивным соотношений параметров компонентов заявляемого изобретения, в предположении наибольшей ширины дорожного полотна 26 метров (8 полос) и, следовательно, времени его пересечения акустическим импульсом примерно 0.08 секунд, частоту первого генератора импульсов 14 можно задать равной 12 герц. Тогда, в предположении размеров памяти FIFO-замеров боковых смещений 53 и памяти FIFO-замеров межмашинных расстояний 67 в 256 слов, частоту второго 52 и пятого 70 генераторов импульсов следует задать равной 3072 герц, а коэффициент пересчета второго 51 и четвертого 71 кольцевых счетчиков принять равным 256. Для обеспечения точности измерения боковых отклонений формируемых линий разметки дорожного полотна в 0.01 метра, частоту четвертого генератора импульсов 64 следует задать не менее 33000 герц. В предположении наличия 128 датчиков в линейках активных 2 и пассивных 21 оптоэлектронных датчиков, коэффициент пересчета первого 10 и третьего 58 кольцевых счетчиков, а также число разрядов сдвигового регистра 61 следует задать равным 128, частоту третьего генератора импульсов 63 следует задать равной 1336 герц.
Повышение производительности труда дорожных рабочих обеспечивается за счет отказа от ручного процесса предварительной разметки и маркировки наносимых полос, замены процесса ручного руления машинами дорожной разметки по предварительным маркерам процессом настройки и контроля за их автоматическим движением, которые могут обеспечиваться меньшим числом дорожных рабочих.
Дополнительным результатом предлагаемого изобретения является возможность автоматического вождения дорожных машин на криволинейных дорогах, снижение напряженности труда дорожных рабочих за счет автоматизации ответственного процесса вождения машин дорожной разметки и повышение качества выполнения разметочных работ за счет исключения ошибок, вызываемых нервным утомлением водителей указанных машин, сокращается время перекрытия дорог в связи с проведением работ по разметке дорожного полотна.
ИСПОЛЬЗОВАННАЯ ЛИТЕРАТУРА
1. Костова Н.З., Юмашев В.М. Разметка автомобильных дорог в России // Автомобильные дороги и мосты. - 2005. - №4. - Режим доступа к журн.: http://stroy.dbaes.ru/48/48049/index.htm#i498757
2. Нанесение предварительной разметки. Опубликовано 16.01.2016 г., http://www.razmetka.com.ua/nanesenie. Дорожная разметка. Все о разметке автомобильных дорог.
3. Данник А.И., Нелюба Д.Н. Проблема автоматизации вождения разметочных машин, http://www.razmetka.com.ua/avtomatizatsia-protsessov/ Опубликовано 29.06.2015 г.
4. Техническое зрение роботов. Под общ. Ред. Ю.Г. Якушенкова. - М.: Машиностроение, 1990. - с. 168-176.
5. Природно-климатические особенности, их влияние на городское зеленое строительство, http://expodesign.org.ru/priodno-klimaticheskie-osobennosti-ih-vlijanie-na-gorodskoe-zelenoe-stroitelstvo. 2011.
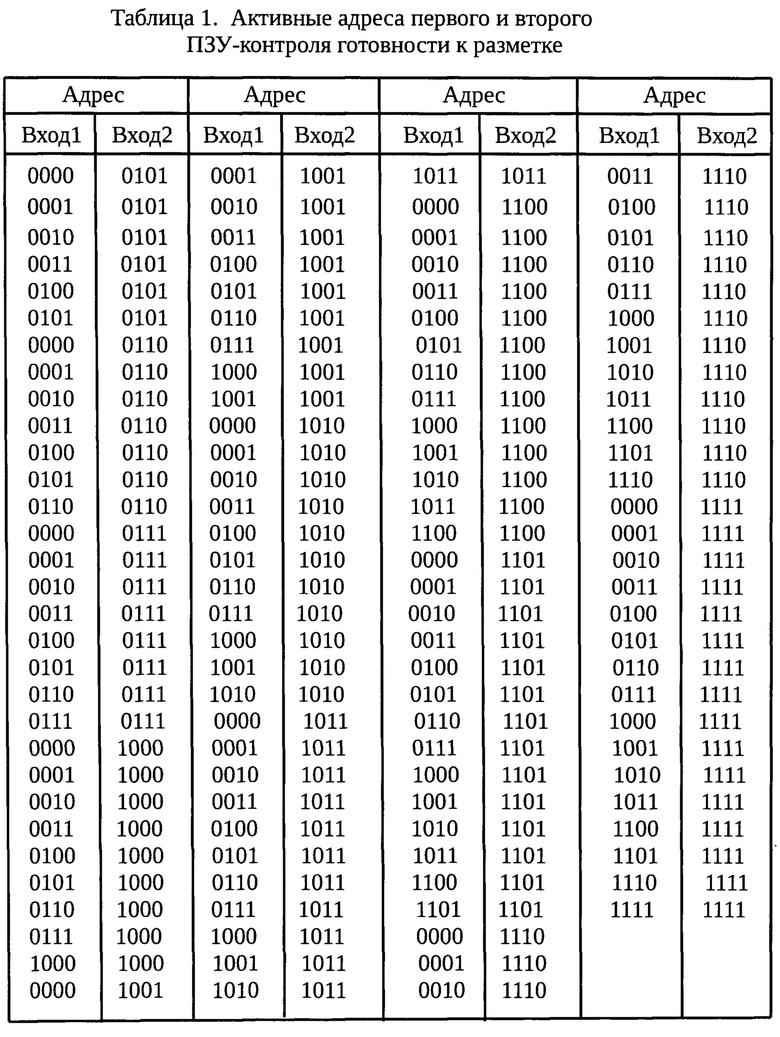
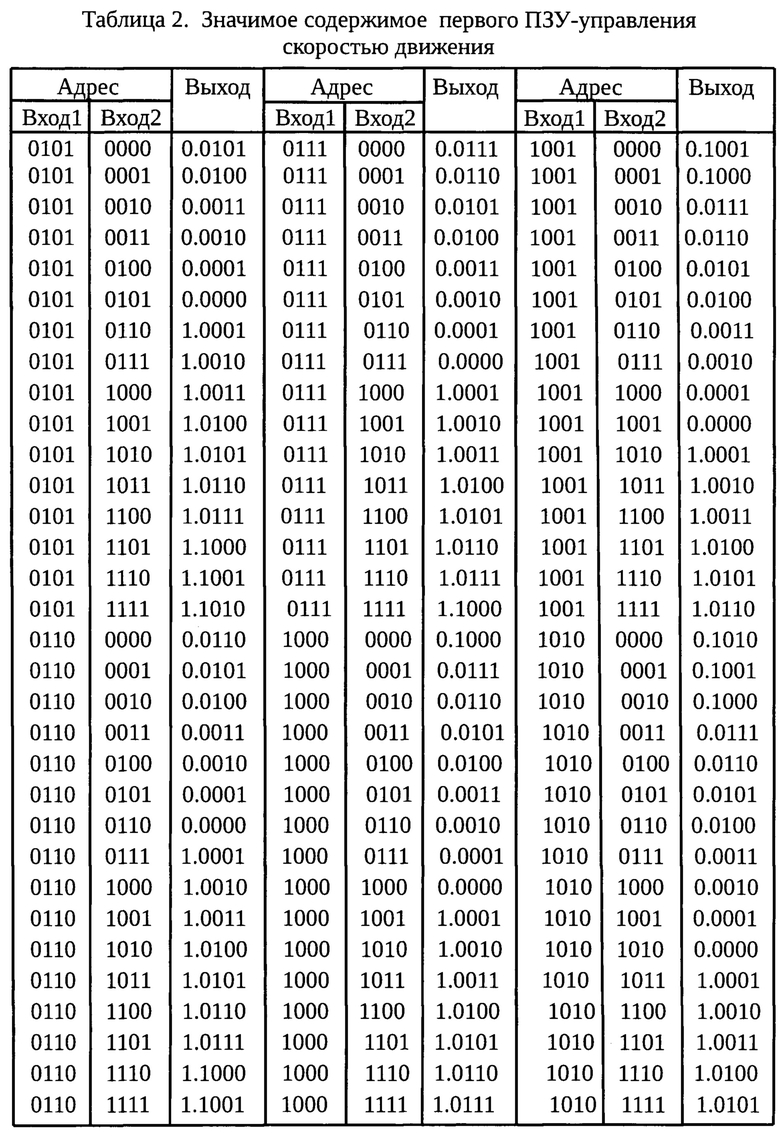
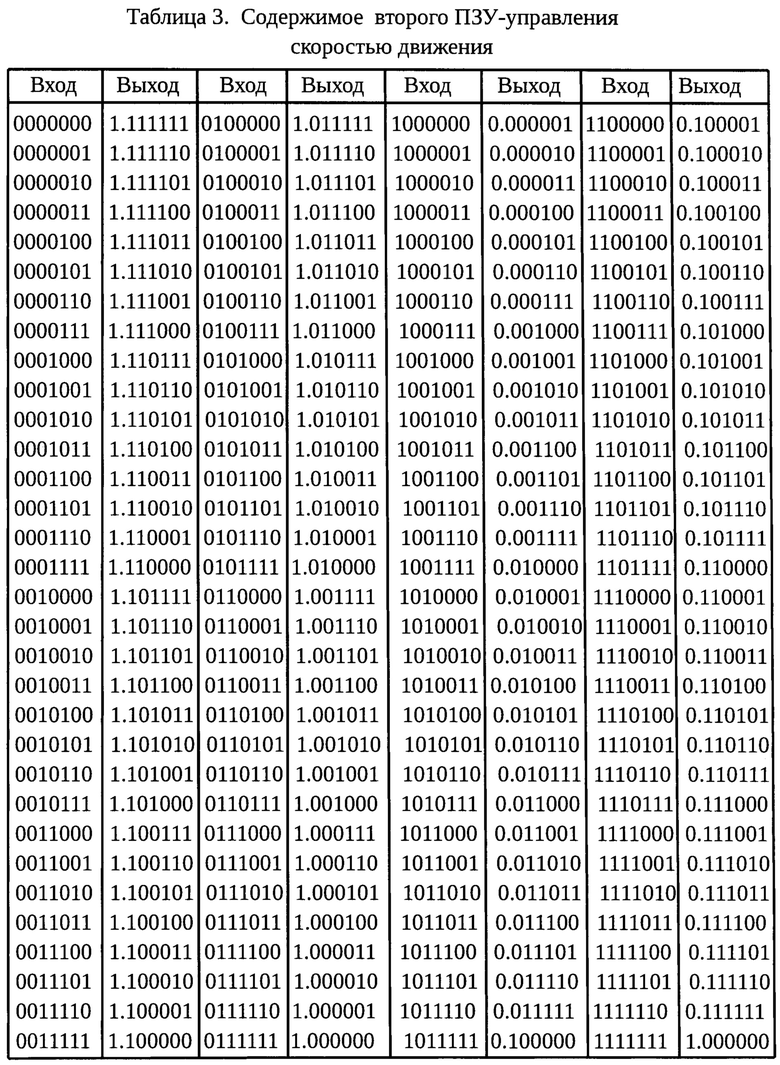
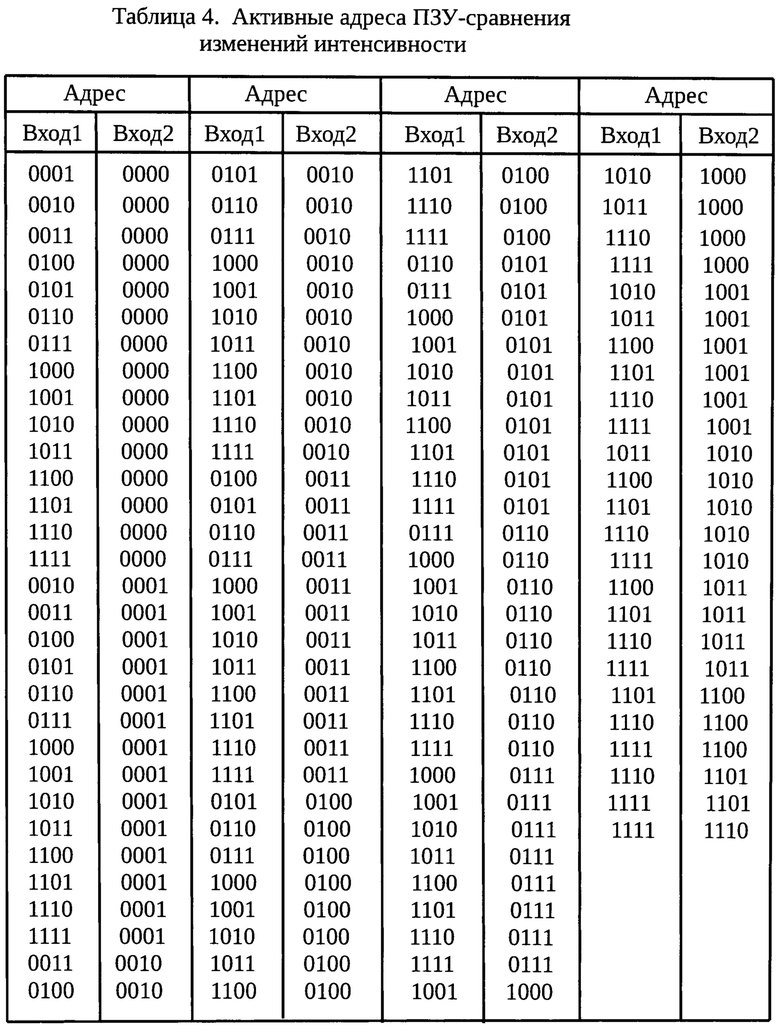
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ ДРОНОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2662297C1 |
| СПОСОБ ПОМОЩИ ВОДИТЕЛЯМ ПРИ ПЕРЕСТРОЕНИЯХ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2646782C2 |
| Дуплексная вычислительная система с контролем | 1987 |
|
SU1564625A1 |
| СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 1994 |
|
RU2103744C1 |
| Система управления гелиостатом | 1990 |
|
SU1784100A3 |
| Устройство для сопряжения ведущей и N ведомых цифровых вычислительных машин | 1988 |
|
SU1531104A1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ | 2018 |
|
RU2714977C1 |
| БОРТОВОЙ СПЕЦВЫЧИСЛИТЕЛЬ | 2013 |
|
RU2522852C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ СОПРОВОЖДЕНИЯ ВОДОЛАЗА | 2017 |
|
RU2672505C1 |
| УСТРОЙСТВО КОНТРОЛЯ ДИСТАНЦИЙ АВТОМОБИЛЯ ДО ПРЕПЯТСТВИЙ | 2010 |
|
RU2425765C1 |
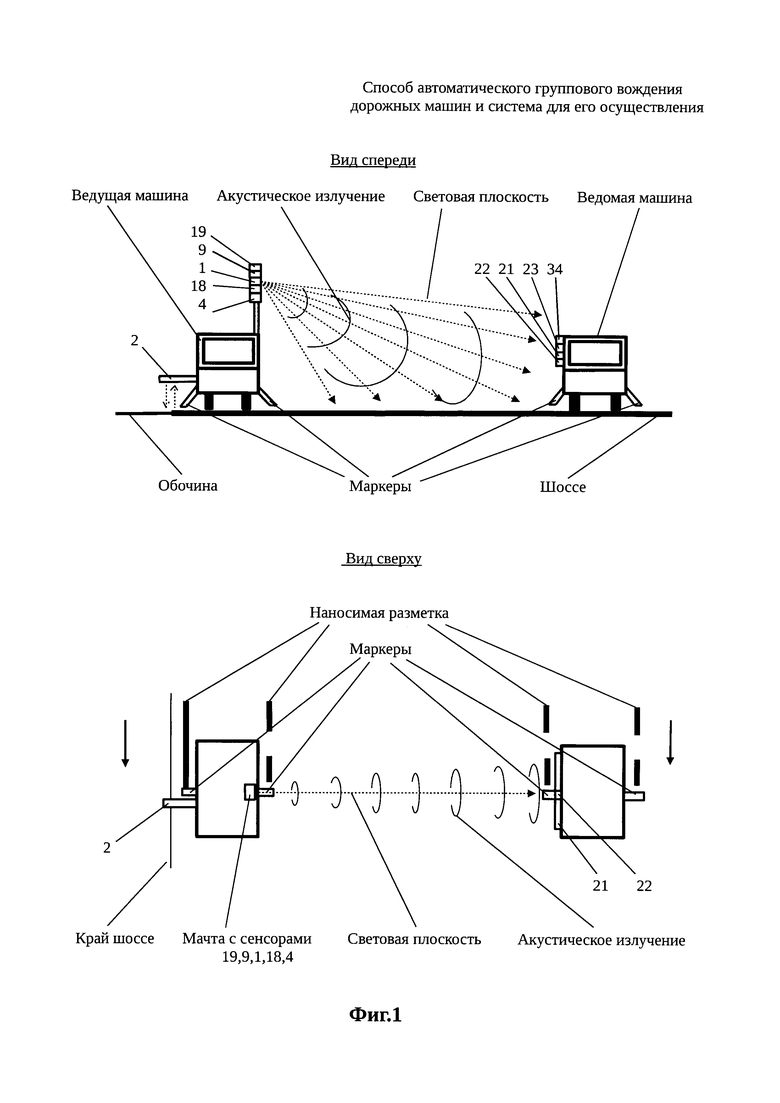
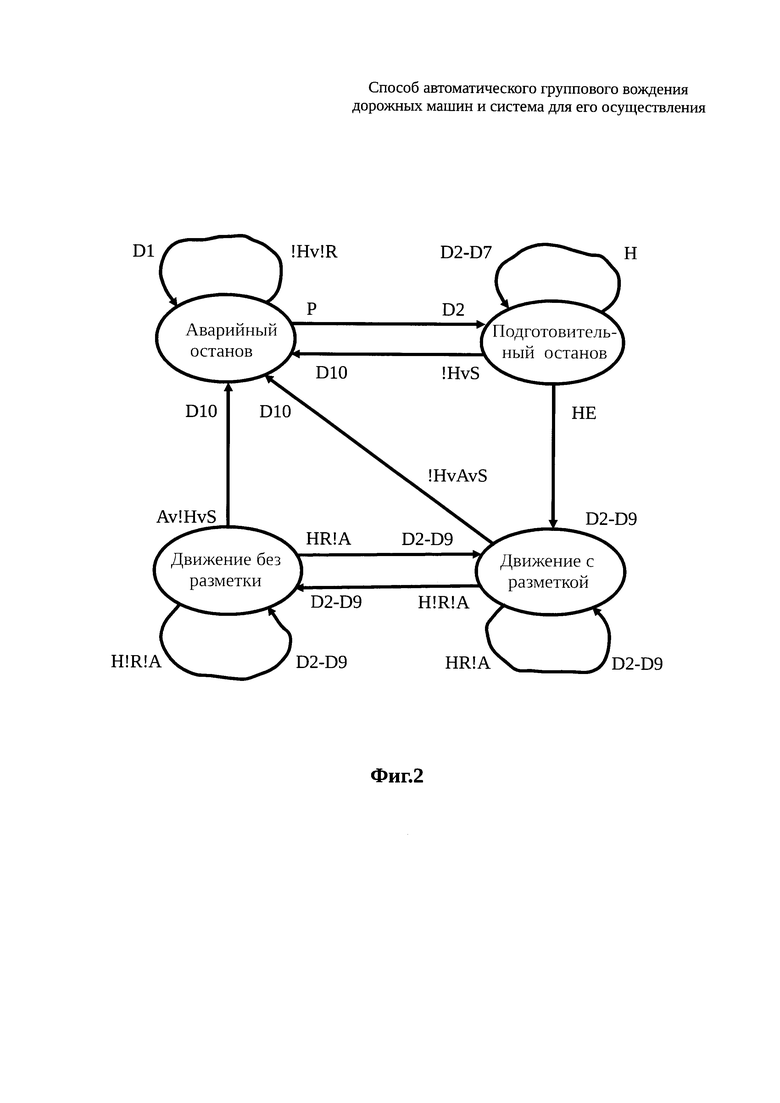
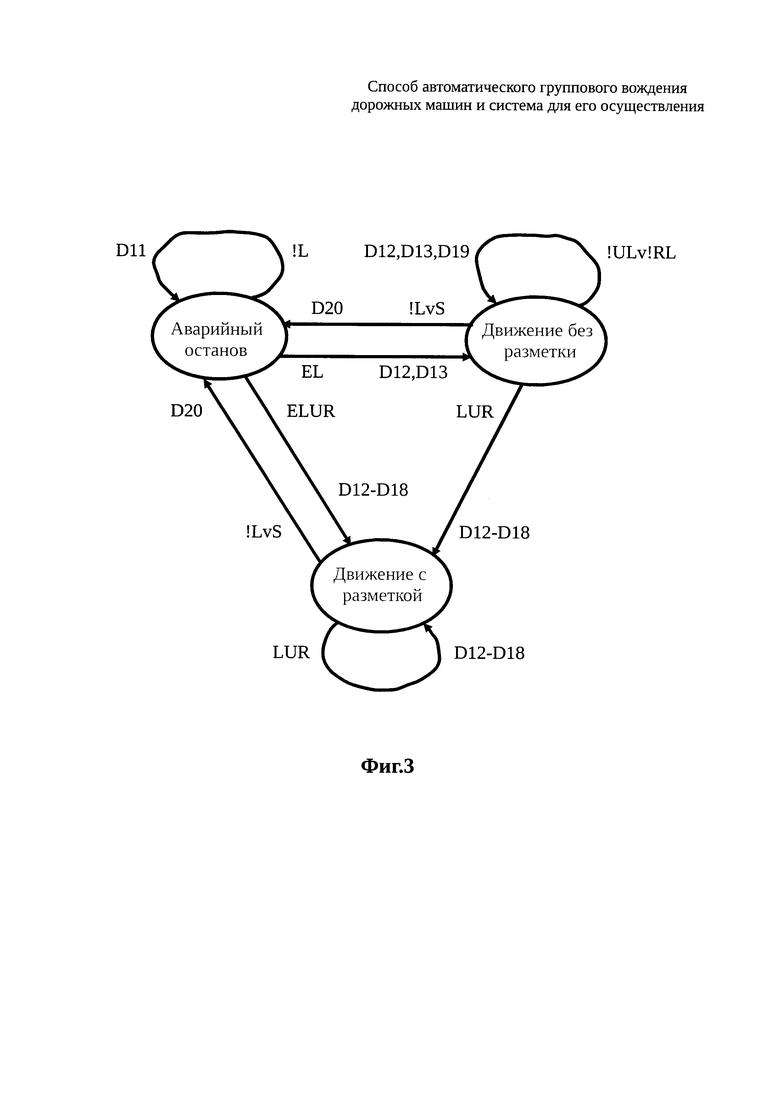
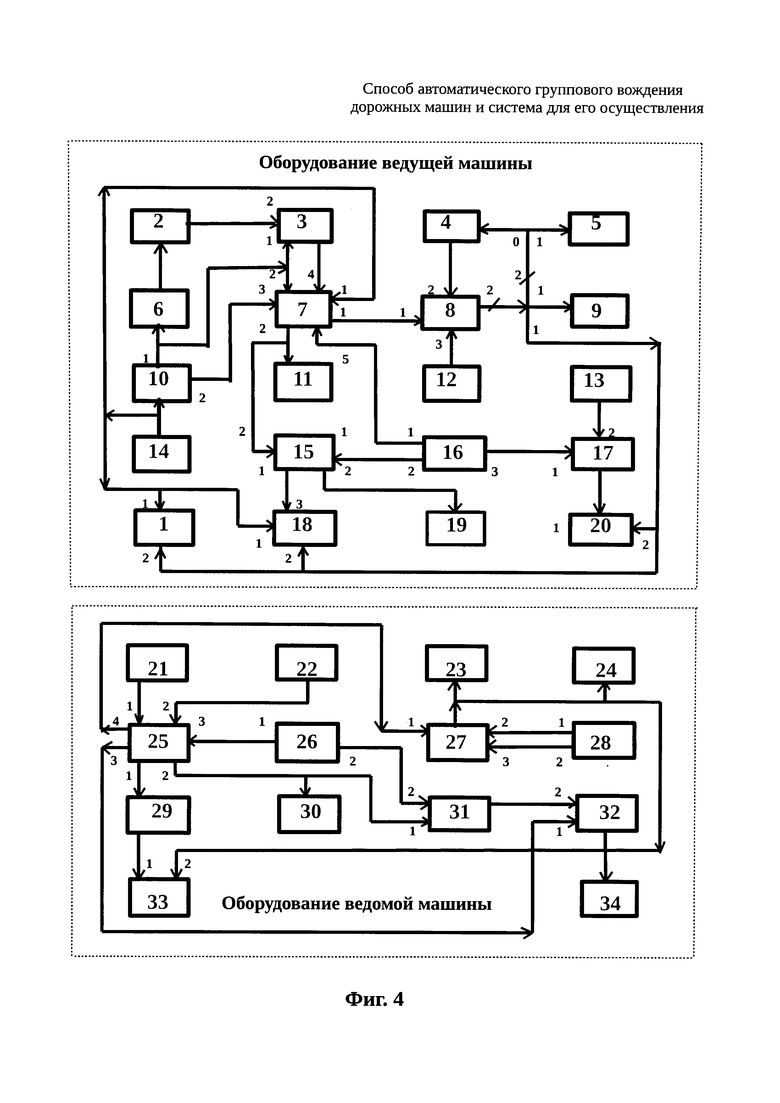
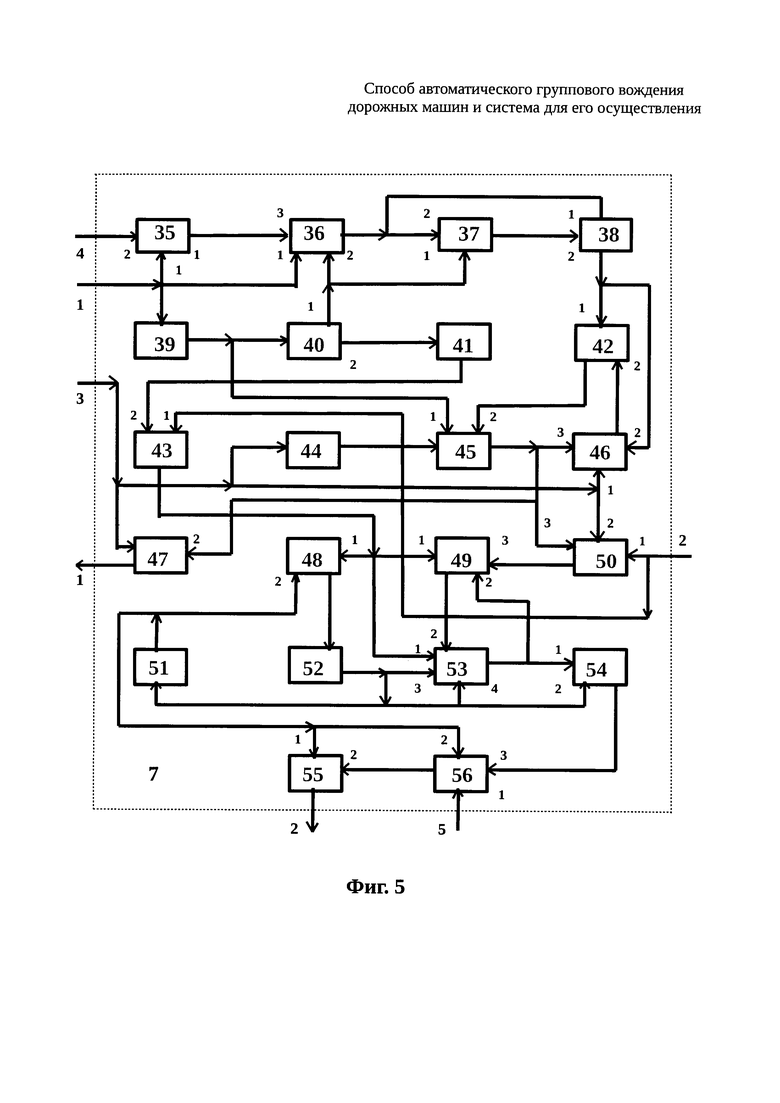
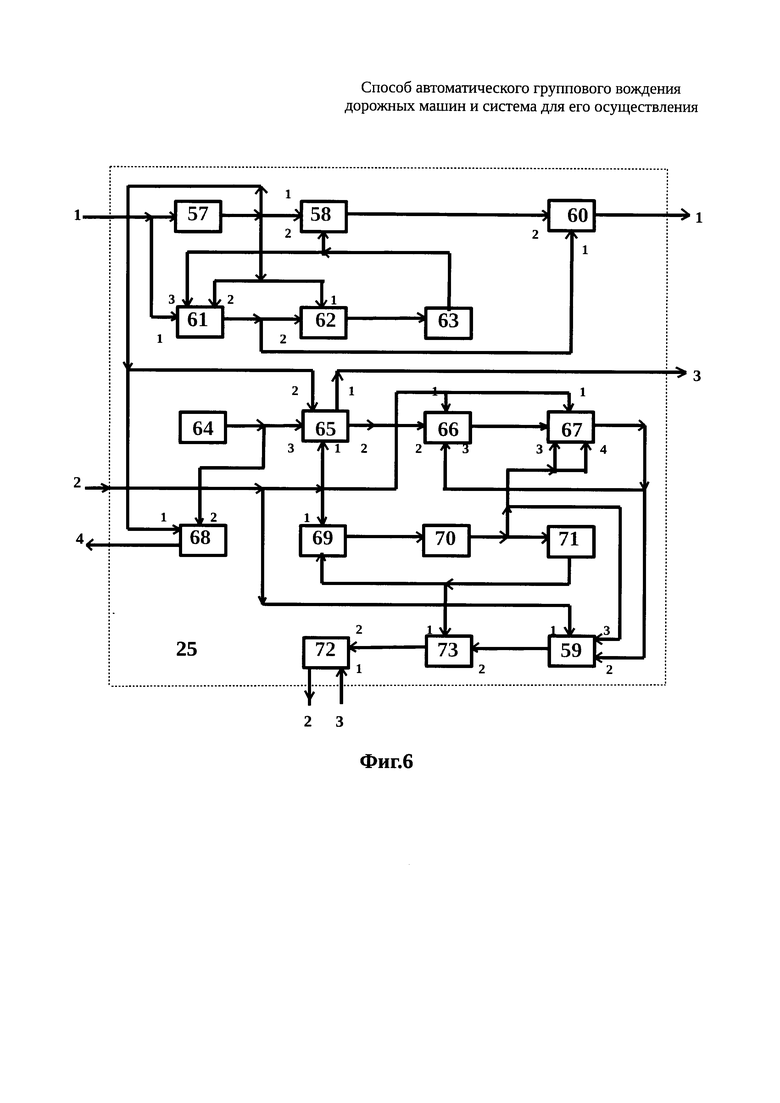
Изобретение относится к области навигации и управления дорожно-строительными машинами. В предлагаемом способе бригада машин состоит из ведущей и ведомых машин. В процессе движения ведущая машина отслеживает с нивелированием максимум перепада отраженного оптического излучения на границе дорожного полотна и обочины. Синхронизацию ведомых машин по скорости движения обеспечивают на основе отслеживания поперечной световой плоскости, формируемой ведущей машиной. Параллельное движение ведомых машин обеспечивают на основе отслеживания установочных расстояний до ведущей машины. Текущие межмашинные расстояния определяют на основе учета разности скоростей распространения лазерных и акустических импульсов, синхронно излучаемых ведущей машиной. Обеспечивается повышение производительности и снижение напряженности труда дорожных рабочих. 2 н. и 4 з.п. ф-лы, 6 ил., 4 табл.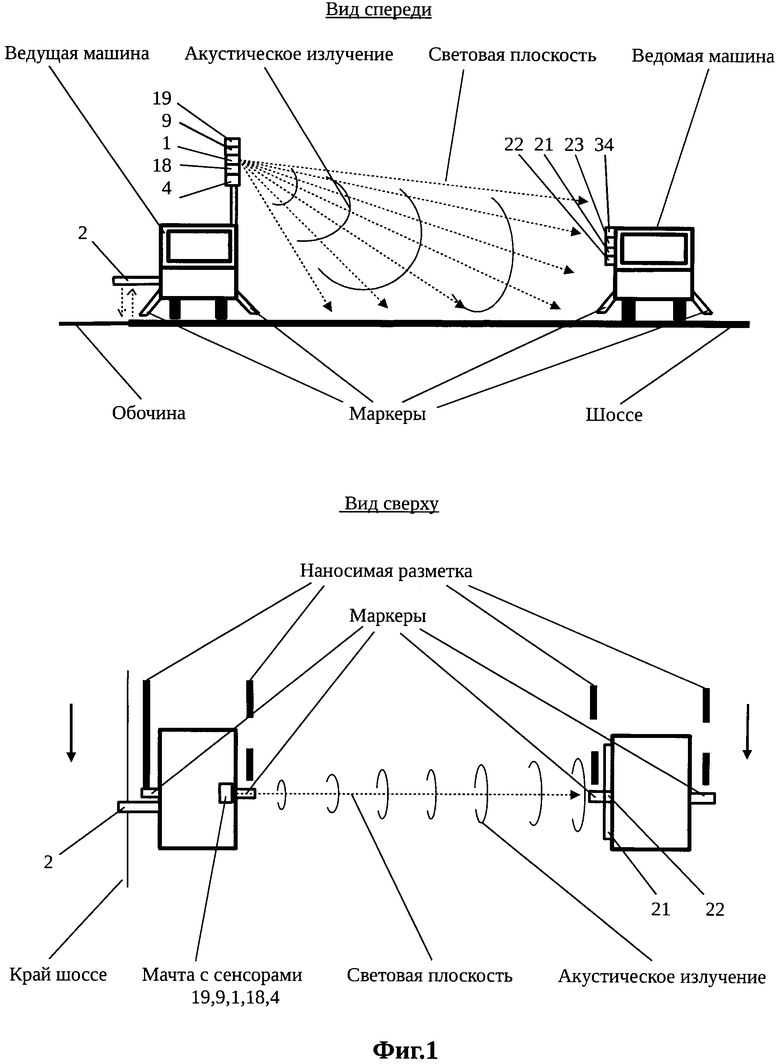
1. Способ автоматического группового вождения дорожных машин, содержащий действие по регулярному формированию с борта ведущей машины вертикальной световой плоскости посредством развертки импульсного лазерного луча, а также действие по управлению рулевым механизмом ведущей дорожной машины, минимизирующее рассогласование положения ее правого маркера относительно предварительно заданной виртуальной установочной линии, отличающийся тем, что в него дополнительно вводят следующие действия:
для ведущей дорожной машины:
- предварительно или после аварийной остановки под ручным управлением ведущую машину размещают в крайней правой, по ходу движения, полосе дорожного полотна так, чтобы боковое рассогласование положения ее правого маркера относительно правой границы дорожного полотна не превышало предельного установочного значения;
- после формирования команд «подготовка» или «движение» до формирования команды «останов» периодически определяют боковое смещение правого маркера относительно правого края дорожного полотна посредством выявления положения наибольшего перепада в интенсивности отраженного оптического излучения на поперечной линии измерения, имеющего место либо вследствие разницы в коэффициентах отражения дорожного полотна и обочины, либо вследствие превышения обочины относительно дорожного полотна, либо вследствие наличия отбойника на границе дорожного полотна и отбойника;
- для каждого замера бокового смещения правого маркера вычисляют его нивелированное значение, равное с его учетом среднему по заранее заданной совокупности предшествующих аналогичных измерений;
- вычисляют текущее боковое рассогласование между заданным в результате предварительной настройки установочным и текущим нивелированным боковым смещением правого маркера относительно правого края дорожного полотна;
- одновременно с каждым формированием световой плоскости при боковом рассогласовании, не превышающем предельного установочного, формируют акустический импульс в полупространство по левому борту этой машины, перекрывающий всю ширину дорожного полотна, с нахождением центра генерации на вертикали центра генерации световой плоскости, а также формируют внутримашинную и внешнюю индикацию готовности к разметке, в противном случае акустическое излучение не формируют;
- после формирования команды «движение» до формирования команды «останов» регулярно вычисляют текущее скоростное рассогласование между заданной при предварительной настройке установочной скоростью движения ведущей машины и ее фактической текущей скоростью;
- после формирования команды «движение» до формирования команды «останов» при успешном определении края дорожного полотна и отсутствии приема аварийного излучения от ведомых машин дорожной разметки управляют движением ведущей машины так, чтобы минимизировать текущее скоростное рассогласование;
- в процессе движения ведущей машины при приеме аварийного излучения от какой-либо ведомой машины дорожной разметки или при неудаче в определении бокового рассогласования в течение заданного количества циклов измерений бокового смещения правого маркера или формировании команды «останов» машину останавливают и одновременно прекращают формирование световой плоскости и акустического излучения в сторону остальных дорожных машин, а также формируют внутримашинную и внемашинную аварийную индикацию;
причем световую плоскость формируют ориентированной влево с перекрытием всей ширины дорожного полотна и с прохождением через правый маркер этой машины после формирования команд «подготовка» или «движение» до формирования команды «останов» при успешном определении края дорожного полотна и отсутствии приема аварийного излучения от ведомых машин, в противном случае формирование световой плоскости прекращают;
для каждой ведомой дорожной машины:
- предварительно или после аварийного останова под ручным управлением размещают машину на свободную дорожную полосу так, чтобы ее правый маркер находился приблизительно на одной поперечной с ведущей машиной стартовой прямой и над предполагаемой линией разметки так, чтобы обеспечивался прием лазерного излучения от ведущей машины;
- после формирования команды «движение» до формирования команды «останов» или прекращения приема лазерного излучения от ведущей машины регулярно принимают импульсное лазерное излучение от ведущей машины и на этой основе регулярно определяют продольное рассогласование положения правого маркера ведомой машины относительно световой плоскости в процессе движения машины;
- после формирования команды «движение» до формирования команды «останов» или прекращения приема лазерного излучения от ведущей машины управляют продольным движением ведомой машины так, чтобы минимизировать ее текущее продольное рассогласование;
- после формирования команды «движение» до формирования команды «останов» или прекращения приема акустического излучения от ведущей машины регулярно принимают импульсное акустическое излучение от ведущей машины и по временной задержке от соответствующего момента приема лазерного излучения и общеизвестной средней скорости распространения звука в воздушной среде регулярно определяют расстояние между одноименными маркерами ведущей и ведомой машин;
- для каждого замера расстояния между одноименными маркерами ведущей и ведомой машин вычисляют его нивелированное значение, равное с его учетом среднему по заранее заданной совокупности предшествующих аналогичных измерений;
- вычисляют текущее боковое рассогласование между предварительно заданным при настройке ведомой машины установочным и текущим нивелированным расстоянием между маркерами ведущей и ведомой машин;
- управляют рулевым механизмом ведомой машины так, чтобы минимизировать ее текущее боковое рассогласование;
- в процессе движения машины при наличии приема как лазерного, так и акустического излучения, а также боковом рассогласовании, не превышающем предельное установочное боковое рассогласование, формируют внутримашинную и внешнюю индикацию готовности к разметке, в противном случае этого не делают;
- при наличии приема лазерного излучения от ведущей машины и одновременном отсутствии приема акустического излучения в течение заданного числа циклов измерений продолжают движение машины с нулевым боковым рассогласованием и без индикации готовности к разметке, после чего машину останавливают и одновременно формируют аварийную внутримашинную индикацию и внешнее аварийное излучение для ведущей дорожной машины;
- при отсутствии приема лазерного излучения от ведущей машины в течение заданного числа циклов измерений или формировании команды «останов» данную машину останавливают и одновременно формируют аварийную внутримашинную индикацию и внешнее аварийное излучение для ведущей дорожной машины;
причем источники формирования световой плоскости и акустического излучения, а также средства обнаружения аварийного излучения на борту ведущей машины размещают с превышением по высоте над средствами обнаружения световой плоскости и акустического излучения, а также источником аварийного излучения на борту каждой ведомой машины, обеспечивающем исключение возможности их экранирования при любых взаимных положениях всех дорожных машин.
2. Способ автоматического группового вождения дорожных машин по п. 1, отличающийся тем, что аварийное излучение формируют электромагнитным, либо акустическим, либо совместным образом с параметрами, отличными от параметров излучения при формировании световой плоскости и акустического излучения, используемого для определения межмашинных расстояний.
3. Способ автоматического группового вождения дорожных машин по п. 1, отличающийся тем, что установочное боковое смещение, скорость движения и предельное боковое рассогласование ведущей машины, а также установочное межмашинное расстояние и предельное боковое рассогласование для каждой ведомой машины, а также команды «подготовка», «движение» и «останов» указанных машин формируют непосредственно на их бортах посредством тактильного создания соответствующих кодов в форме электрических сигналов, либо удаленным образом по акустическому или радиоканалу с параметрами, отличными от параметров излучения при формировании световой плоскости и акустического излучения, используемого для определения межмашинных расстояний.
4. Система для реализации способа автоматического группового вождения дорожных машин по п. 1, содержащая на борту ведущей дорожной машины формирователь световой плоскости, отличающаяся тем, что в нее дополнительно введены
на борту ведущей машины: линейка активных оптоэлектронных датчиков, одноканальный мультиплексор, датчик аварийного излучения, первый привод торможения, дешифратор, блок определения бокового рассогласования, двухразрядный регистр, первый аварийный индикатор-излучатель, первый кольцевой счетчик, первый сервопривод рулевого механизма, первый датчик команд оператора, цифровой спидометр, первый генератор импульсов, первое ПЗУ контроля готовности к разметке, первый датчик настроек параметров движения, первое ПЗУ управления скоростью движения, акустический излучатель, первый индикатор-излучатель готовности к разметке, первый сервопривод скорости движения
и следующие блоки на борту ведомой машины: линейка пассивных оптоэлектронных датчиков, датчик акустического излучения, второй аварийный индикатор-излучатель, второй привод торможения, блок определения позиционного рассогласования, второй датчик настроек параметров движения, первый RS-триггер, второй датчик команд оператора, второе ПЗУ управления скоростью движения, второй сервопривод рулевого механизма, второе ПЗУ контроля готовности к разметке, первый логический элемент ИЛИ-НЕ, второй сервопривод скорости движения, второй индикатор-излучатель готовности к разметке,
причем применительно к оборудованию ведущей машины: выход первого генератора импульсов соединен с входом первого кольцевого счетчика, первым входом блока определения бокового рассогласования, а также с первыми входами формирователя световой плоскости и акустического излучателя, линии шины первого выхода первого кольцевого счетчика соединены с одноименными линиями шины входа дешифратора, одноименными линиями шины первого входа одноканального мультиплексора и одноименными линиями шины второго входа блока определения бокового рассогласования, второй выход первого кольцевого счетчика связан с третьим входом блока определения бокового рассогласования, линии шины выхода дешифратора соединены с одноименными линиями входной шины линейки активных оптоэлектронных датчиков, линии шины выхода которого связаны с одноименными линиями шины второго входа одноканального мультиплексора, выход которого соединен с четвертым входом блока определения бокового рассогласования, линии шины пятого входа которого связаны с одноименными линиями первого выхода первого датчика настроек параметров движения, первый выход блока определения бокового рассогласования соединен с первым входом двухразрядного регистра, а линии шины второго выхода связаны с одноименными линиями шины входа первого сервопривода рулевого механизма и одноименными линиями шины первого входа первого ПЗУ контроля готовности к разметке, линии шины второго выхода первого датчика параметров движения соединены с одноименными линиями шины второго входа первого ПЗУ контроля готовности к разметке, а линии шины третьего выхода связаны с одноименными линиями шины первого входа первого ПЗУ управления скоростью движения, первый выход первого ПЗУ контроля готовности к разметке соединен с вторым входом акустического излучателя, а второй выход связан с входом первого индикатора-излучателя готовности к разметке, выход датчика аварийного излучения соединен со вторым входом двухразрядного регистра, линии шины третьего входа которого подключены к одноименным линиям шины выхода первого датчика команд оператора, линии шины выхода цифрового спидометра связаны с одноименными линиями шины второго входа первого ПЗУ управления скоростью движения, линии шины выхода которого связаны с одноименными линиями шины первого входа первого сервопривода скорости движения, 0 - линия шины (инверсного) выхода двухразрядного регистра соединена с входом датчика аварийного излучения, 1 - линия шины (инверсного) выхода двухразрядного регистра соединена с входами первого привода торможения, первого аварийного индикатора-излучателя, вторым входом первого сервопривода скорости движения, а также со вторым входом формирователя световой плоскости и третьим входом акустического излучателя, а применительно к оборудованию ведомой машины: линии шины выхода линейки пассивных оптоэлектронных датчиков соединены с одноименными линиями шины первого входа блока определения позиционного рассогласования, линии шины первого выхода которого связаны с одноименными линиями шины входа второго ПЗУ управления скоростью движения, линии шины второго выхода соединены с одноименными линиями шины входа второго сервопривода рулевого механизма и шины первого входа второго ПЗУ контроля готовности к разметке, выход датчика акустического излучения связан со вторым входом блока определения позиционного рассогласования, линии шины третьего входа которого связаны с одноименными линиями шины первого выхода второго датчика настроек параметров движения, третий выход блока определения позиционного рассогласования связан с первым входом первого логического элемента ИЛИ-НЕ, четвертый выход связан с первым входом первого RS-триггера, второй вход и третий вход первого RS-триггера соединены соответственно с первым выходом и вторым выходом второго датчика команд движение/останов, линии шины выхода второго ПЗУ управления скоростью движения связаны с одноименными линиями шины первого входа второго сервопривода скорости движения, выход первого RS-триггера связан с входом второго аварийного индикатора-излучателя, входом второго привода торможения и вторым входом второго сервопривода скорости движения, линии шины второго выхода второго датчика настроек параметров движения связаны с одноименными линиями шины второго входа второго ПЗУ контроля готовности к разметке, выход которого соединен со вторым входом первого логического элемента ИЛИ-НЕ, своим выходом связанного со входом второго индикатора-излучателя готовности к разметке,
причем формирователь световой плоскости, акустический излучатель и датчик аварийного излучения на ведущей дорожной машине размещают на мачте.
5. Система для реализации способа автоматического группового вождения дорожных машин по п. 4, отличающаяся тем, что блок определения бокового рассогласования включает в себя следующие блоки: аналого-цифровой преобразователь, первый регистр, второй регистр, первый вычитатель, первый ждущий блокинг-генератор, второй ждущий блокинг-генератор, третий ждущий блокинг-генератор, ПЗУ сравнения перепадов яркости, первый логический элемент И, логический элемент НЕ, второй логический элемент И, третий регистр, первый счетчик, второй RS-триггер, первый многоканальный мультиплексор, четвертый регистр, второй кольцевой счетчик, второй генератор импульсов, память FIFO-замеров боковых смещений, первый сумматор-накопитель, пятый регистр, второй вычитатель,
причем первым входом блока определения бокового рассогласования служат связанные между собой первый вход АЦП, первый вход первого регистра и вход первого ждущего блокинг-генератора, вторым входом блока определения бокового рассогласования служат связанные одноименными линиями шина первого входа четвертого регистра и шина первого входа первого логического элемента И, третьим входом блока определения бокового рассогласования служат связанные между собой вход логического элемента НЕ, первый вход первого счетчика, первый вход третьего регистра и второй вход четвертого регистра, четвертым входом блока определения бокового рассогласования служит второй вход АЦП, пятым входом блока определения бокового рассогласования служит первый вход второго вычитателя, первым выходом блока определения бокового рассогласования служит линия старшего разряда шины выхода первого счетчика, вторым выходом блока определения бокового рассогласования служит выход пятого регистра, выход первого ждущего блокинг-генератора соединен с входом второго ждущего блокинг-генератора и первым входом второго логического элемента, выход второго ждущего блокинг-генератора связан с входом третьего ждущего блокинг-генератора, вторым входом первого регистра и первым входом второго регистра, линии шины выхода АЦП связаны с одноименными линиями шины третьего входа первого регистра, линии шины выхода которого связаны с одноименными линиями шины второго входа второго регистра и одноименными линиями шины первого входа первого вычитателя, линии шины второго входа которого связаны с одноименными линиями шины второго выхода второго регистра, линии шины выхода первого вычитателя связаны с одноименными линиями шины первого входа ПЗУ сравнения перепадов яркости и с одноименными линиями шины второго входа третьего регистра, линии шины выхода которого соединены с одноименными линиями шины второго входа ПЗУ сравнения перепадов яркости, выход которого связан со вторым входом второго логического элемента И, выход третьего ждущего блокинг-генератора соединен со вторым входом первого логического элемента И, выход которого связан с первым входом второго RS-триггера, первым входом первого многоканального мультиплексора и первым входом памяти FIFO-замеров боковых смещений, выход второго логического элемента И связан с третьим входом третьего регистра, с третьим входом четвертого регистра и вторым входом первого счетчика, выход логического элемента НЕ соединен с третьим входом второго логического элемента, выход второго RS-триггера соединен с входом второго генератора импульсов, линии шины выхода памяти FIFO-замеров боковых смещений связаны с одноименными линиями шины первого входа первого сумматора-накопителя и шины второго входа первого многоканального мультиплексора, линии шины второго входа которого связаны с одноименными линиями шины выхода четвертого регистра, линии шины выхода первого многоканального мультиплексора связаны с одноименными линиями шины второго входа памяти FIFO-замеров боковых смещений, выход второго генератора связан с третьим входом и четвертым входом памяти FIFO-замеров боковых смещений, входом второго кольцевого счетчика и вторым входом первого сумматора-накопителя, выход второго кольцевого счетчика соединен со вторым входом второго RS-триггера, первым входом пятого регистра и вторым входом второго вычитателя, линии группы старших разрядов шины выхода которого связаны с одноименными линиями шины третьего входа второго вычитателя, линии шины выхода которого связаны с одноименными линиями второго входа пятого регистра.
6. Система для реализации способа группового автоматического вождения дорожных машин по п. 4, отличающаяся тем, что блок определения позиционного рассогласования включает в себя следующие блоки: второй логический элемент ИЛИ, третий кольцевой счетчик, шестой регистр, сдвиговый регистр, третий RS-триггер, третий генератор импульсов, четвертый генератор импульсов, второй счетчик, второй многоканальный мультиплексор, память FIFO-замеров межмашинных расстояний, третий счетчик, четвертый RS-триггер, пятый генератор импульсов, четвертый кольцевой счетчик, третий вычитатель, седьмой регистр, второй сумматор-накопитель,
причем первым входом блока определения позиционного рассогласования служат связанные между собой одноименными линиями шина входа второго логического элемента ИЛИ и шина первого входа сдвигового регистра, вторым входом блока определения позиционного рассогласования служат связанные между собой первый вход второго счетчика, первый вход второго многоканального мультиплексора, первый вход памяти FIFO-замеров межмашинных расстояний, первый вход четвертого RS-триггера и первый вход второго сумматора-накопителя, третьим входом блока определения позиционного рассогласования служит шина первого входа третьего вычитателя, первым выходом блока определения позиционного рассогласования служит шина выхода шестого регистра, вторым выходом блока определения позиционного рассогласования служит шина выхода третьего вычитателя, третьим выходом блока определения позиционного рассогласования служит первый выход второго счетчика, четвертым выходом блока определения позиционного рассогласования служит выход третьего счетчика, выход второго логического элемента ИЛИ связан с первым входом третьего кольцевого счетчика, со вторым входом сдвигового регистра, первым входом третьего RS-триггера, вторым входом второго счетчика и первым входом третьего счетчика, выход сдвигового регистра связан со вторым входом третьего RS-триггера и первым входом шестого регистра, линии шины второго входа которого связаны с одноименными линиями шины выхода третьего кольцевого счетчика, выход третьего RS-триггера связан с входом третьего генератора импульсов, выход которого соединен с третьим входом сдвигового регистра и вторым входом третьего кольцевого счетчика, выход четвертого генератора импульсов соединен с третьим входом второго счетчика и вторым входом третьего счетчика, линии шины второго выхода второго счетчика связаны с одноименными линиями шины второго входа третьего многоканального мультиплексора, линии шины выхода которого связаны с одноименными линиями шины второго входа памяти FIFO-замеров межмашинных расстояний, линии шины выхода которой связаны с одноименными линиями шины третьего входа второго многоканального мультиплексора и с одноименными линиями шины второго сумматора-накопителя, выход четвертого RS-триггера связан входом пятого генератора импульсов, выход которого связан со входом четвертого кольцевого счетчика, третьим входом второго сумматора-накопителя, а также третьим входом и четвертым входом памяти FIFO-замеров межмашинных расстояний, выход четвертого кольцевого счетчика связан со вторым входом четвертого RS-триггера и первым входом седьмого регистра, линии шины второго входа которого связаны с одноименными линиями группы старших разрядов шины выхода второго сумматора-накопителя, линии шины выхода седьмого регистра связаны с одноименными линиями шины второго входа третьего вычитателя.
| СПОСОБ УПРАВЛЕНИЯ ГРУППОВЫМ ВОЖДЕНИЕМ МАШИН | 1999 |
|
RU2172085C2 |
| СПОСОБ ОРИЕНТИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ДОРОЖНЫХ МАШИН | 1995 |
|
RU2100521C1 |
| Устройство для группового вождения самоходных машин | 1985 |
|
SU1308221A1 |
| Устройство для группового вождения тракторных агрегатов | 1979 |
|
SU950211A1 |

