Изобретение относится к машиностроению и может быть использовано в приводах различных машин с импульсным режимом работы.
Целью изобретения является повышение надежности, нагрузочной способности и долговечности за счет обеспечения стабиль- ;ности условий заклинивания. : На фиг. 1 изображен клиновый меха- |низм свободного хода; на фиг. 2 - то же, I вид слева; на фиг. 3 - рабочий клин; на |фи1 4 - геометрические параметры клина. I Д еханизм содержит ведуш.ий эксцентрик |1 с запрессованной в него бронзовой втул- |кой.2, ведомую обойму 3, промежуточное |кольцо 4 с бронзовой втулкой 5, свободно установленное на эксцентрик. I В клиновой полости между цилиндри- |ческими поверхностями кольца 4 и ведомой |обоймы 3 расположен рабочий клин В, |поджатый пружиной 7, опирающейся на |упорный клин 8, который фиксируется |пальцем 9. Кинематическая связь кольца 14 с ведомой обоймой 3 осуществляется Посредством радиального паза 10, выполнен- iHoro в обойме 3, и камня 11, свободно ус- гга.новленного на оси 12, закрепленной в |кольце 4.
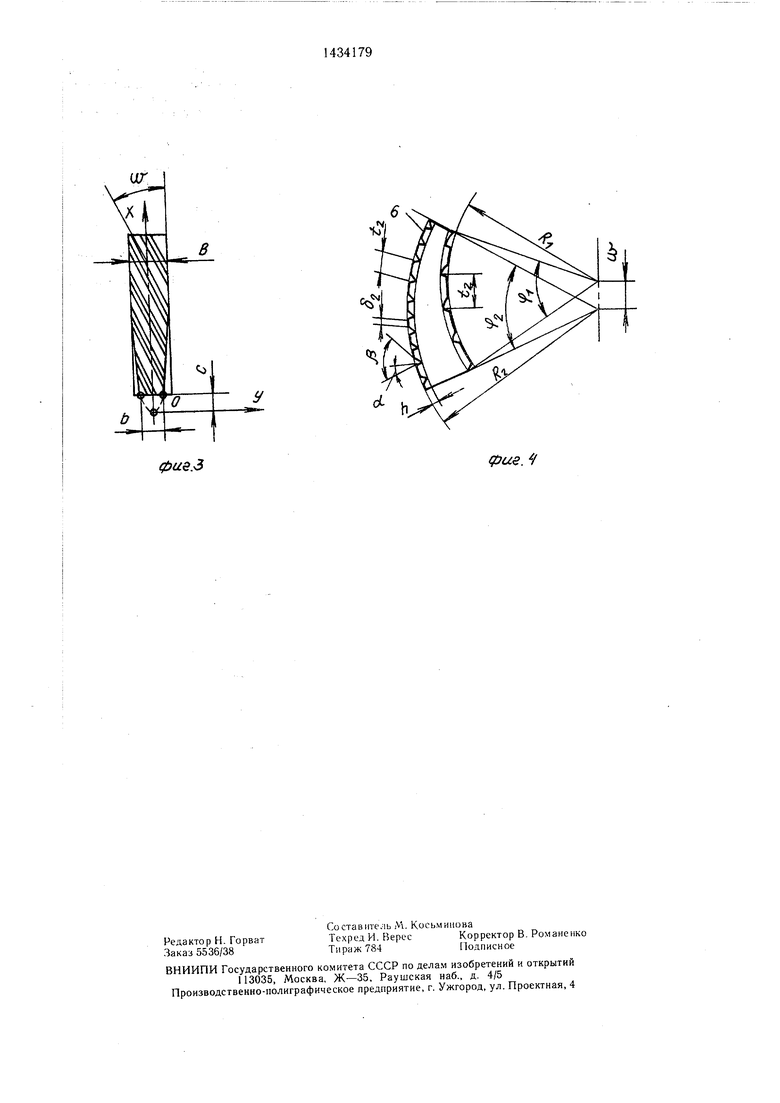
I Принято следующее обозначение геомет- Ьических параметров рабочего клина (фиг. 4); jti,t2 - шаг канавок на внутренней 13 и на- 1ружной.14 поверхности клипа 6, радиусов :Ri и Ra; 62 - ширина единичной контакт- ной площадки по наружной поверхности; ji,a,p - глубина, передний угол и угол |Профиля канавок; со - угол подъема вин- Ь-овой линии канавки; Е - эксцентриситет; ff, Ф2 - углы охвата поверхностей клина; |В,6 - максимальная и минимальная ши- Ьина контактной поверхности клина; С - ус- ровный параметр, определяемый из кон- Ьтруктивных соображений и вида параболы, по которой изменяем ширину В/ вдоль )эси ОХ. Профиль канавок можно брать (треугольный, прямоугольный и трапецеидаль- ыи, но главное, чтобы он был асимметрич
{ЫЙ.
; С учетом простоты изготовления, техно- огичности и ускорения снятия смазки в Ьериод холостого хода опти.мально выполняем треугольный ассиметричный профиль канавки, причем пологая грань ее обращена в сторону холостого хода эксцентрика. Направление винтовой линии на рабочих поверхностях клина из условий равновесия его выполнено противоположным. Теоретические и экспериментальные исследования рекомендуют принимать следующее значение параметров; /i (0,8-1,6) мм - из условий требуемого ресурса по критерию износа рабочих поверхностей; 62(0,3 0,5)/;; /2(2-2,5)/г; а) (0,5-1,0) X ф2(р| 40-60°; а 15-30°; р 1 60-90°; В - из условий прочности на смятие рабочих поверхностей; - из условий равного среднего удельного
0
0
5
0
5
0
5
1;)н.1ения rjo номинальным плош.адкам AI и .Ла при равных суммарных усилиях FI я р2 на рабочие поверхности клина в заклиненном состоянии механизма; e.,R,R2 - конструктивно из условий заклинивания и расклинивания.
Для выравнивания интенсивности распределения удельных давлений по рабочим граням клина их ширина должна изменяться в соответствии с законом распределения усилий по этим граням.
Давления в сечениях В/ распределяются не линейно, а по параболическому закону. Из этих соображений фаски по рабочим граням делаем также по параболе, уравнение которой , где р - фокальный параметр. Приняв ,
, получим соотношение у--у-в ---.
Ki
позволяюп1ее выполнить фаски рабочих граней.
Ме.ханизм работает следующим образом.
При повороте эксцентрика 1 (фиг. 2) против часовой стрелки он давит на промежуточное кольцо 4 и прижимает клин к рабочей поверхности обоймы 3. Угол клина 6 и величина эксцентриситета е выбираются из условий его заклинивания и расклинивания при заданных условиях смазки, что исключает поворот рабочего клина относительно обоймы под действием радиальной силы, действующей со стороны кольца 4. Следовательно, поворот эксцентрика 1 против часовой стрелки осуществляет рабочий ход, а обратный поворот соответствует свободному ходу механизма. В момент холостого хода происходит снятие слоя смазки передними гранями треугольных выступов и стекание ее по канавкам. Обраи1ение пологой грани асимметричного профиля канавки в сторону холостого хода исключает создание избыточного давления смазки в канавке. Это позволяет применять смазки в более пироком диапазоне их вязкости при сохранении функциональной работоспо- собности механизма.
При рабоче.м ходе происходит BiiUiaajm- вание и стекаиие сма.жи из зоны контакта рабочих поверхностей по канавкам, обеспечивая условия .мгновенного заклинивания, т.е. цовьппается надежность работы механизма и его несущая способность. Такое выполнение канавок обусловливает быстрое удаление смазки и продуктов износа из зоны контакта рабочих поверхностей клина, упрощение технологии его изготовления, выполненной за одну установку детали, стабильность положения клина и устранение избыточного давления смазки в канавках в момент рабочего хода.
Равномерные удельные давления на ра- бо1;1их гранях за счет разницы шагов канавок и их ширины создают условия равномерного износа в зоне контакта и сохраняют постоянство угла заклинивания, что повышает долговечность механизма.
Формула изобретения
1. Клиновый механизм свободного хода, содержащий ведомую обойму и ведущий эксцентрик, соединенные свободно установленным на эксцентрике промежуточным кольцом, кинематически связанным с обоймой, промежуточный-клин, размещенный в зазоре между промежуточным кольцом и обоймой, отличающийся тем, что, с целью увеличения надежности, нагрузочной способности и долговечности за счет обеспечения стабильности условий заклинивания, на поверхностях клина, контактирующих с кольцом и обоймой, выполнены канавки асимметричного профиля, расположенные по винтовой многозаходной линии, пологая грань профиля канавки направлена в сторону холос
того хода ведущего эксцентрика, канавки расположены с различным шагом, а направление винтовых линий на внутренней и на наружной поверхностях клина противоположно.
2. Механизм по п. 1, отличающийся тем, что клин выполнен переменной ширины, уменьшающейся от его вершины по зависимости
где В - максимальная длина контактной
линии клина; RI - радиус внутренней поверхности
клина; - радиус наружной поверхности
клина; X - переменная координата по оси
абсцисс.

| название | год | авторы | номер документа |
|---|---|---|---|
| Клиновой механизм свободного хода | 1983 |
|
SU1160152A1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 1999 |
|
RU2156897C1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2000 |
|
RU2194199C2 |
| Клиновой механизм свободного хода | 1981 |
|
SU966354A1 |
| ВЫПРЯМИТЕЛЬ МЕХАНИЧЕСКИХ ИМПУЛЬСНЫХ КОЛЕБАНИЙ | 2014 |
|
RU2563380C1 |
| КЛИНОВОЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2004 |
|
RU2279001C1 |
| КЛИНОВАЯ МУФТА СВОБОДНОГО ХОДА | 2001 |
|
RU2221941C2 |
| Роликовая муфта свободного хода | 1991 |
|
SU1812361A1 |
| Клиновой механизм свободного хода | 1989 |
|
SU1693294A1 |
| Клиновой механизм свободного хода | 1982 |
|
SU1057714A1 |
Изобретение относится к машиностроению, в частности к клиновым механизмам свободного хода, и предназначено для иснользоваия в приводах различных машин с импульсным режимом работы. Цель - повышение надежности, нагрузочной способности и долговечности. Механизм содержит эксцентрик 1 и ведомую обойму 3. На эксцентрике свободно установлено промежуточное кольцо 4. В клиновом зазоре между кольцом 4 и обоймой 3 расположен рабочий клин 6, поджатый пружиной 7. При рабочем ходе промежуточное кольцо 4 прижимает клин 6 к рабочей поверхности обоймы 3, происходит заклинивание. При холостом ходе асимметричные винтовые канавки на рабочих гранях клина 6 обеспечивают снятие слоя смазки, отвод ее по канавкам, удаление по этим же канавкам продуктов износа из зоны контакта рабочих поверхностей клина, а значит стабильность условий заклинивания. 1 з.п. ф-лы, 4 ил. (Л оо 4;: СО
f
ф1/е.1
0UQ.3
фие. f
| Клиновой механизм свободного хода | 1985 |
|
SU1267082A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Клиновой механизм свободного хода | 1983 |
|
SU1160152A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
