(Л
ПИЮ прямого хода полюсами 5, 6, 8, и силовыми катушками обратного 2, , 4 и прямого 7 хода, внутри которы 1| асположен якорь 10, имеющий возмож- ijocTb перемещения в аксиальном нап- 1|)авлении в немагнитной направляющей штулке.11. На обращенной к якорю по- ферхности полюсов 5, 6 и 8 выполнены юперечные кольцевые выступы с пос- оянным шагом по длине полюса. Шаг
выступов полюса 5 вдвое больше шага выступов полюса 6 и втрое больше шага выступов полюса 8, а на якоре выполнены ответные выступы с таким же шагом, как и на полюсах. Удержание бойка осуществляется электромагнитными силами самих силовых катушек либо их секциями без дополнительных устройств что позволяет повысить надежность молота. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ИМПУЛЬСНОГО ВИБРОИСТОЧНИКА | 2012 |
|
RU2491709C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ УДАРНОГО ДЕЙСТВИЯ | 2010 |
|
RU2455145C1 |
| Электропривод возвратно-поступательного движения | 1983 |
|
SU1136294A1 |
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ С ПРИВОДОМ ОТ ЛИНЕЙНОГО ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ | 2016 |
|
RU2630026C1 |
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ | 2004 |
|
RU2295025C2 |
| УСТРОЙСТВО ДЛЯ ЗАБИВАНИЯ ГВОЗДЕЙ ИЛИ СКРЕПЛЕНИЯ СКОБАМИ | 2003 |
|
RU2329136C2 |
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ | 1988 |
|
SU1584480A1 |
| ЭЛЕКТРИЧЕСКИЙ МОЛОТ | 1989 |
|
RU2018652C1 |
| Электрическая машина ударного действия | 1990 |
|
SU1710720A1 |
| Электромагнитный молот | 1982 |
|
SU1051256A1 |

Изобретение относится к электромагнитным ударным механизмам и может быть использовано в строительстве и горном деле для забивки в грунт шпунта, свай, рыхления и уплотнения грунта, разрушения асфальтобетонов и т.д.. Цель изобретения увеличение удельной энергии удара молота. Элект- ромагнитнь/й молот включает корпус 1 с установленными в нем по направле
k
Изобретение относится к злектро- :агнитным ударным механизмам и может ()ыть использовано в строительстве для абивки в грунт деревянных и железобе- онных свай, металлических труб, ры- шения и уплотнения грунта, дробле- ия негабаритов, разрушения асфальто- етонов и т.д. .
Цель изобретения - увеличение Дельной энергии удара молота.
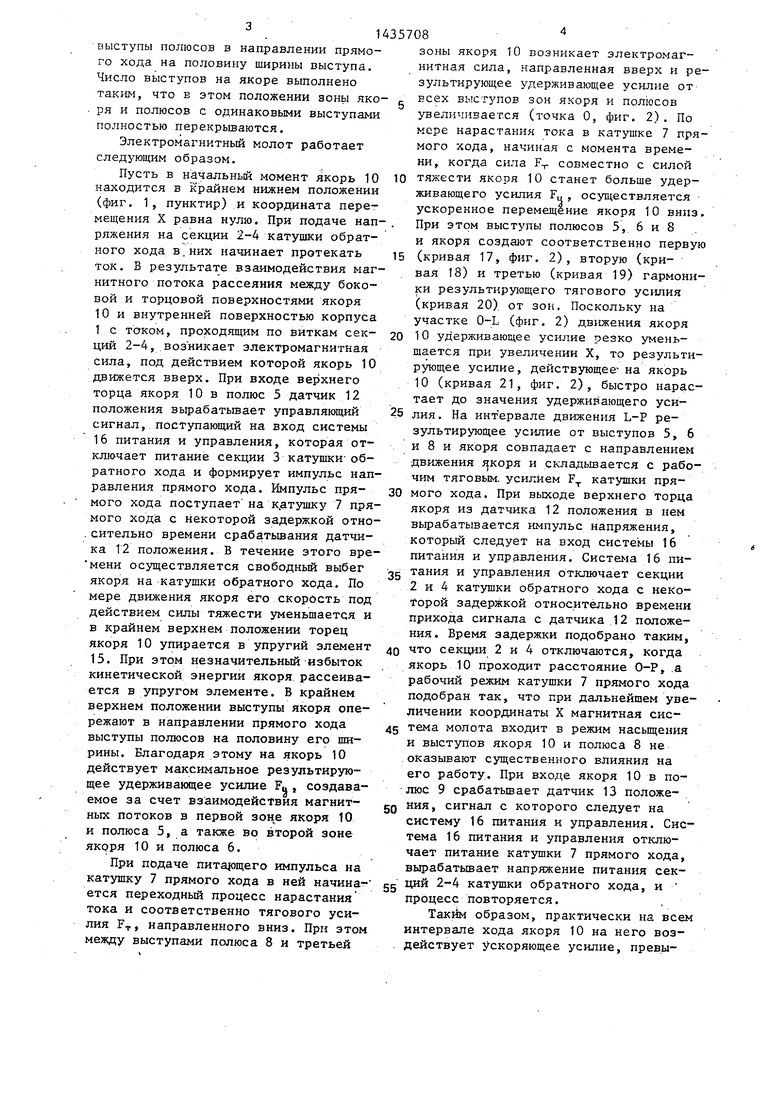
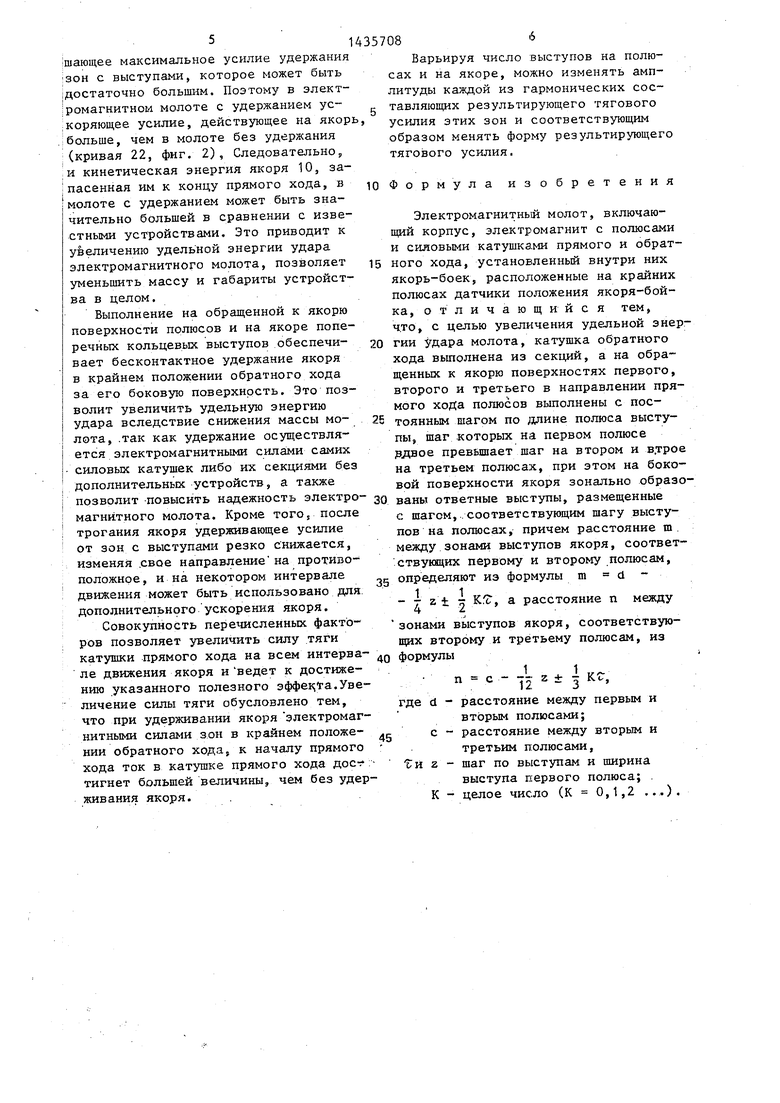
На фиг. 1 представлена конструктивная схема электромагнитного моло- Taj на фиг. 2 - тяговые характеристики зубцоЁЬгх зон -и тяговые характеристики катушки прямого хода в режиме с ;удержанием и без удержания. ; .Электромагнитньй молот содержит цилиндрический ферромагнитный корпус :1, внутри которого соосно установлены секции 2-4, катушки обратного хода с полюсами 5 и 6 и катушка 7 прямого хода с полюсами 8 и 9. Внутри катушек расположен цилиндрический ферромагнитный якорь 10, имеющий возможность перемещаться в аксиальном направлении внутри немагнитной направляющей втулки 11.НМ. внешней стороне полюсов 5 и 9 установлены индуктивные датчики 12 и 13 положения прямого и обратного хода соответственно. К верхней части корпуса 1 прикреплена кръппка 14 с упругим элементом 15,
Электромагнитный молот содержит также систему 16 цитания и управления, входы которой соединены с датчиками 12 и 13, а выходы - с секциями 2-4 катушки обратного хода и с катушкой 7 прямого хода.
Полюс 5 является первым по счету в направлении прямого хода якоря, а полюса 6 и 8 - соответственно вторым и третьим.
На внутренней поверхности полюсов 5, 6 и 8, обрап(енной к якорю 10, выполнены поперечные кольцевые выступы с постоянным шагом по длине полю- са, причем шаг выступов полюсов 6 и 8 соответственно вдвое и втрое меньше шага по зубцам полюса 5. На боковой поверхности якоря 10, начиная от верхнего торца, вьшолнены
ответные выступы, образующие в направлении прямого хода первую, вторую и третью секции. Шаг выступов первой, второй и третьей зон якоря равен соответственно шагу выступов полюсов
5, 6 и 8, а расстояния между любыми выступами первой и второй, второй и третьей зон якоря равны соответственно:
25
m d - 7 ztke ; n с --:: zik Z,
4 2И2 ТЗ
где d - расстояние между полюсами
5 и 6; с - расстояние между полюсами
30 б и 8;
-сГ, Z,- шаг по зубцам и ширина зуб ца полюса 5;
К - целое исло (К О, 1,2 ...). Все выступы полюсов и якоря выполнены с одинаковыми соотнощениями
35
геометрических размеров внутри одной
секции. Расстояние между упругим элементом 15 и полюсом 5 равно свободному выбегу бойка и подобрано так, что в крайнем положении .обратного хода выступы якоря опережают
Е1ыступы ПОЛЮСОВ в направлении прямого хода на половину ширины выступа. Число выступов на якоре выполнено таким, что в этом положении зоны яко ря и полюсов с одинаковыми выступами полностью перекрьшаются.
Электромагнитный молот работает следующим образом.
Пусть в начальньй момент якорь 10 находится в крайнем нижнем положении (фиг. 1, пунктир) и координата перемещения X равна нулю. При подаче нап ряжения на секции 2-4 катушки обратного хода в.них начинает протекать Ток. В результате взаимодействия маг нитного потока рассеяния между боковой и торцовой поверхностями якоря 10 и внутренней поверхностью корпуса 1 с током, проходящим по виткам секций 2-4, возникает электромагнитная сила, под действием которой якорь 10 движется вверх. При входе верхнего торца якоря 10 в полюс 5 датчик 12 положения вьфабатьшает управляющий сигнал, поступающий на вход системы 16 питания и управления, которая от- питание секции 3 катущки-обратного хода и формирует импульс направления прямого хода. Импульс прямого хода поступает на к.атушку 7 прямого хода с некоторой задержкой относительно времени срабатьшания датчика 12 положения. В течение этого вре- мени осуществляется свободный выбег якоря на катушки обратного хода. По мере движения якоря его скорость под действием силы тяжести уменьшается и в крайнем верхнем положении торец якоря 10 упирается в упругий элемент 15. При этом незначительный избыток кинетической энергии якоря рассеивается в упругом элементе. В крайнем верхнем положении выступы якоря опережают в направлении прямого хода выступы полюсов на половину его ширины. Благодаря этому на якорь 10 действует максимальное результирующее удерживакнцее усилие F , создаваемое за счет взаимодействия магнитных потоков в первой якоря 10 и полюса 5, а также во второй зоне якрря 10 и полюса 6.
При подаче питающего импульса на катушку 7 прямого хода в ней начина- ется переходный процесс нарастания тока и соответственно тягового усилия FT, направленного вниз. При этом между выступами полюса 8 и третьей
35708
зоны якоря 10 возникает электрона - нитная сила, направленная вверх и результирующее удерживающее усилие от всех выступов зон якоря и полюсов увеличивается (точка О, фиг. 2). По мере нарастания тока в катушке 7 прямого хода, начиная с момента времени, когда ciina F- совместно с силой
10 тяжести якоря 10 станет больше удерживающего усилия FU, осуществляется ускоренное перемещение якоря 10 вниз. При этом выступы полюсов 5, 6 и 8 и якоря создаст соответственно первую
15 (кривая 17, фиг. 2), вторую (кривая 18) и третью (кривая 19) гармоники результирующего тягового усилия (кривая 20) от зон. Поскольку на участке 0-L (фиг. 2) движения якоря
20 10 удерживающее усилие резко уменьшается при увеличении X, то результирующее усилие, действующее- на якорь 10 (кривая 21, фиг. 2), быстро нарастает до значения удерживающего уси25 ЛИЯ. На инт ервале движения L-P результирующее усилие от выступов 5, 6 и 8 и якоря совпадает с направлением движения коря и складьшается с рабочим тяговым, усилием F катушки пря30 мого хода. При выходе верхнего торца якоря из датчика 12 положения в нем вырабатывается импульс напряжения, который следует на вход системы 16 питания и управления, Cиcтe a 16 пи25 тания и управления отключает секции 2 и 4 катушки обратного хода с некоторой задержкой относительно времени прихода сигнала с датчика 12 положения. Бремя задержки подобрано таким,
40 что секции 2 и 4 отключаются, когда якорь 10 проходит расстояние 0-Р, .а рабочий режим катушки 7 прямого хода подобран так, что при дальнейшем увеличении координаты X магнитная сис45 молота входит в режим насьш{ения и выступов якоря 10 и полюса 8 не оказывают существенного влияния на его работу. При входе якоря 10 в по- люс 9 срабатьшает датчик 13 положеQQ ния, сигнал с которого следует на систему 16 питания и управления. Система 16 питания и управления отключает питание катушки 7 прямого хода, вырабатывает напряжение питания сек55 ций 2-4 катушки обратного хода, и процесс повторяется.
Таким образом, практически на всем интервале хода якоря 10 на него воз- . действует ускоряющее усилие, превышающее максимальное усилие удержания ЗОН с выступами, которое может быть ;достаточно большим. Поэтому в элект- ;ромагнитнои молоте с удержанием ус- ;Коряющее усилие, действующее на якорь, .; больше, чем в молоте без удержания :(кривая 22, фиг. 2), Следовательно, и кинетическая энергия якоря 10, за- I пасенная им к концу прямого хода, в молоте с удержанием может быть значительно большей в сравнении с известными устройствами. Это приводит к увеличению удельной энергии удара электромагнитного молота, позволяет уменьшить массу и габариты устройства в целом.
Выполнение на обращенной к якорю поверхности полюсов и на якоре поперечных кольцевых выступов обеспечивает бесконтактное удержание якоря в крайнем положении обратного хода за его боковую поверхность. Это позволит увеличить удельную энергию удара вследствие снижения массы молота, .так как удержание осуществляется электромагнитными силами самих силовых катушек либо их секциями без дополнительных устройств, а также
Варьируя число выступов на полюсах и на якоре, можно изменять амплитуды каждой из гармонических составляющих результирующего тягового усилия этих зон и соответствующим образом менять форму результирующего тягового усилия.
10 Формула изобретения
Электромагнитньй молот, включающий корпус, электромагнит с полюсами и силовыми катушками прямого и обрат15 ного хода, установленньй внутри них якорь-боек, расположенные на крайних полюсах датчики положения якоря-бойка, отличающийся тем, что, с целью увеличения удельной энер20 гии Удара молота, катушка обратного хода вьшолнена из секций, а на обращенных к якорю поверхностях первого, второго и третьего в направлении прямого хода полюсов выполнены с пос25 тоянным шагом по длине полюса выступы, шаг которых на первом полюсе
Эдвое превышает шаг на втором и в.трое на третьем полюсах, при этом на боковой поверхности якоря зонально образопозволит повысить надежность электро- зо ваны ответные выступы, размещенные
магнй.тного молота. Кроме того, после
с шагом,., соответствующим шагу выступов на полюсах, причем расстояние т. между зонами выступов якоря, соответ- ствунщих первому и второму полюсам, 35 определяют из формулы m d трогания якоря удерживающее усилие от зон с выступами резко снижается, изменяя .свое направление на противоположное, и на некотором интервале движения может быть использовано для. дополнительного ускорения якоря.
Совокупность перечисленных факторов позволяет увеличить силу тяги
катушки прямого хода на всем интерва- ле движения якоря и ведет к достижению указанного полезного эффек;1 а.Уве- личение силы тяги обусловлено тем, что при удерживании якоря электромагнитными силами зон в крайнем положении обратного хода, к началу прямого хода ток в катушке прямого хода дос-:-; тигнет большей величины, чем без удерживания якоря. .
Варьируя число выступов на полюсах и на якоре, можно изменять амплитуды каждой из гармонических составляющих результирующего тягового усилия этих зон и соответствующим образом менять форму результирующего тягового усилия.
Формула изобретения
Электромагнитньй молот, включающий корпус, электромагнит с полюсами и силовыми катушками прямого и обратного хода, установленньй внутри них якорь-боек, расположенные на крайних полюсах датчики положения якоря-бойка, отличающийся тем, что, с целью увеличения удельной энергии Удара молота, катушка обратного хода вьшолнена из секций, а на обращенных к якорю поверхностях первого, второго и третьего в направлении прямого хода полюсов выполнены с постоянным шагом по длине полюса выступы, шаг которых на первом полюсе
с шагом,., соответствующим шагу выступов на полюсах, причем расстояние т. между зонами выступов якоря, соответ- ствунщих первому и второму полюсам, 35 определяют из формулы m d - 7 2 t 2 расстояние п между
зонами выступов якоря, соответствующих второму и третьему полюсам, из
- - г ± 1 К1
де d формулыК
С ЪЙ 2 расстояние между первым и вторым полюсами; расстояние между вторым и третьим полюсами, шаг по выступам и ширина выступа первого полюса; . целое число (К 0,1,2 ...).
Редактор А.Ворович
Составитель Н.Заболоцкая
Техред Л.Сердюкоеа Корректор В. Гирняк
Заказ 5618/28
Тираж 637
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
fue.2
Подписное
| Электромагнитный молот | 1982 |
|
SU1051256A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Малов А.Т | |||
| Электромагнитные молоты | |||
| Новосибирск: Наука, 1979, с | |||
| Насос | 1917 |
|
SU13A1 |
