лые цилиндры. Внутри МП установлен диамагнитный боек 3 с проточкой, в которой установлен намагниченный в радиальном направлении постоянный магнит 4. При подаче электрического сигнала в схему управления магнитный поток замыкается между последними парами полюсов секций 11 и 12 через дополнительные секции 14, и постоянный магнит начнет движение вверх, перемещая за собой боек 3. Установка .секции 14 между полюсами секций 11 и 12 способст вует улучшению условий запуска. По мере прохождения электромагнитом секций 12,
11 и 10 соответственно импульсы питающего тока будут последовательно подаваться в соответствующую обмотку. Это способствует быстрейшему разгону бойка 3 при холостом ходе. При достижении бойком 3 верхнего положения импульсы питающего напряжения изменяют полярность питания и магнит 4 движется вниз, увлекая за сэбой боек 3. При этом импульсы питания по мере движения бойка 3 подаются на соответствующие обмотки. Это способствует быстрейшему разгону бойка 3 и увеличивает КПД машины. 1 з.п.ф-лы, 3 ил. 

| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный привод ударного действия | 1986 |
|
SU1394388A1 |
| Электроударный механизм | 1986 |
|
SU1361321A1 |
| Ударный узел электромагнитного перфоратора | 1990 |
|
SU1700226A1 |
| Электромагнитный привод ударного действия | 1986 |
|
SU1432679A1 |
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ С ПРИВОДОМ ОТ ЛИНЕЙНОГО ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ | 2016 |
|
RU2630026C1 |
| Устройство управления электромагнитным молотком | 1989 |
|
SU1709083A1 |
| Электроударный механизм | 1982 |
|
SU1027384A1 |
| Электромагнитная машина возвратно-поступательного движения | 1981 |
|
SU1001346A2 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1992 |
|
RU2025872C1 |
| ЭЛЕКТРОПРИВОД ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ИМПУЛЬСНОГО ВИБРОИСТОЧНИКА | 2012 |
|
RU2491709C1 |

Изобретение относится к горнойпромышленности, а именно к электромагнитным машинам ударного действия, и может быть использовано для отбойки угля и породы в угольных шахтах, карьерах, а также на строительстве и других областях.
Известна электромагнитная машина ударного действия, включающая корпус со статорной Обмоткой, внутри которой расположен диамагнитный боек, в кольцевой проточке которого к ее торцам прикреплены упругие элементы, а в центре кольцевой проточки размещен кольцевой магнит.
Недостатком данной конструкции являются сравнительно высокие потоки рассеяния магнитного поля, так как статорная обмотка не имеет магнитопровода. Следствием этого является низкая эффективность его работы.
Известна электромагнитная машина ударного действия, включающая магнитопровод со статорной обмоткой, внутри которой находится боек из магнитопроводящего материала. Недостатком данной конструкции молотка являются значительные габаритьг, особенно при необходимости повышения энергетических параметров, так как в этом случае необходимо располагать в ряд по ходу движения бойка несколько статорных обмоток с магнитопроводамй. Однако при этом для обеспечения нормального функционирования магнитопровода, его секции необходимо располагать с интервалами друг относительно друга на расстоянии, примерно.равном продольным размерам бойка, что вызывает значительное увеличение габаритов молотка.
Более близкой по технической сущности является конструкция электромагнитной машины ударного действия, которая содержит kopnyc с отдельными секциями явнополюсного магнитопровода поперечного типа и статорными обмотками на секциях, а также боек, размещенный внутри магнитопровода.
Недостатком данной конструкции электрической машины ударного действия являются сравнительно низкие энергетические
параметры.
При попытке повышения энергетических параметров в данной конструкции, а именно бойка с диамагнитной и магнитной частями, возникает техническое противоречие. Использование постоянного магнита ведет к росту энергетических параметров машины, это приводит к усложнению конструкции за счет усложнения устройства коммутации, так как в данном случае требуется
подача в статорные обмотки двухполярного питания. Кроме того, усложняется запуск машины в работу. Последнее обстоятельство обусловлено тем, что после отключения питания постоянный магнит занимает.пол;ожение равноеесия относительно полюсов какой-либо секции магнитопровода. Из этого состояния магнит очень трудно привести в движение, так как подача тока в ту же статорну.ю обмотку практически не дает эффекта, так же, как и подача тока в любую другую статорную обмотку любой соседней секции магнитопровода. Поэтому для приведения в действие такой машины необходимо придать магниту начальную скорость
и сместить его из положения равновесия. Это трудно осуществить без специальных устройств, значительно усложняющих конструкцию.
изобретения является повышение энергетических параметров при одновременном упрощении конструкции и улучшения условий запуска в работу за счет австоматического перераспределения магнитного потока между полюсами магнитопровода.
Указанная цель достигается за счет того, что молоток снабжен дополнительными бесполюсными секциями поперечного типа и намагниченным в радиальном направлении постоянным магнитом, причем боек выполнен диамагнитным с проточкой, в котором размещен постоянный магнит, а дополнительные бесполюсные секции установлены между явнополюсными секциями магнитопровода.
Кроме того, статорные обмотки размещены на полюсах магнитопровода.
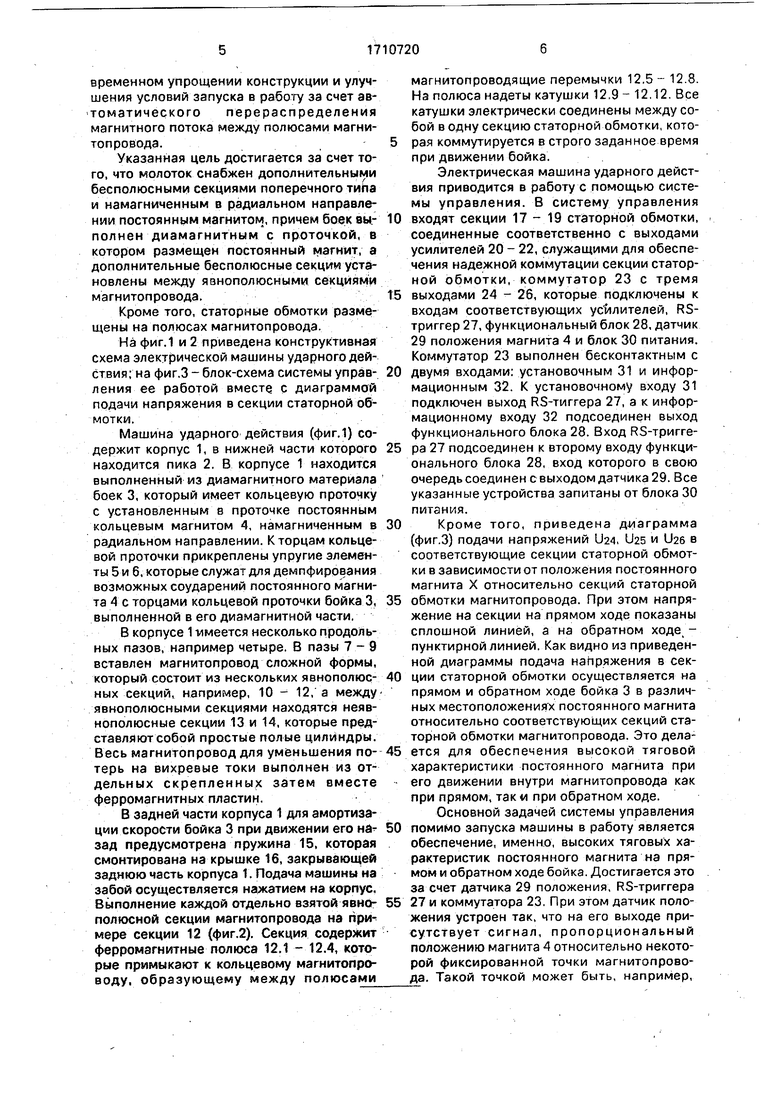
На фиг.1 и 2 приведена конструктивная схема электрической машины ударного действия; на фиг.З - блок-схема системы управления ее работой вместе с диаграммой подачи напряжения в секции статорной обмотки.
Машина ударного действия (фиг.1) содержит корпус 1, в нижней части которого находится пика 2. В корпусе 1 находится выполненный из диамагнитного материала боек 3, который имеет кольцевую проточку с установленным в проточке постоянным кольцевым магнитом 4, намагниченным в радиальном направлении. К торцам кольцевой проточки прикреплены упругие элементы 5 и 6, которые служат для демпфирования возможных соударений постоянного магнита 4 с торцами кольцевой проточки бойка 3, выполненной в его диамагнитной части.
В корпусе 1 -имеется несколько продольных пазов, например четыре. В пазы 7-9 вставлен магнитопровод сложной формы, который состоит из нескольких явнополюрных секций, например, 10 - 12, а между явнополюсными секциями находятся неявнополюсные секции 13 и 14, которые представляют собой простые полые цилиндры. Весь магнитопровод для уменьшения потерь на вихревые токи выполнен из отдельных скрепленных затем вместе ферромагнитных пластин.
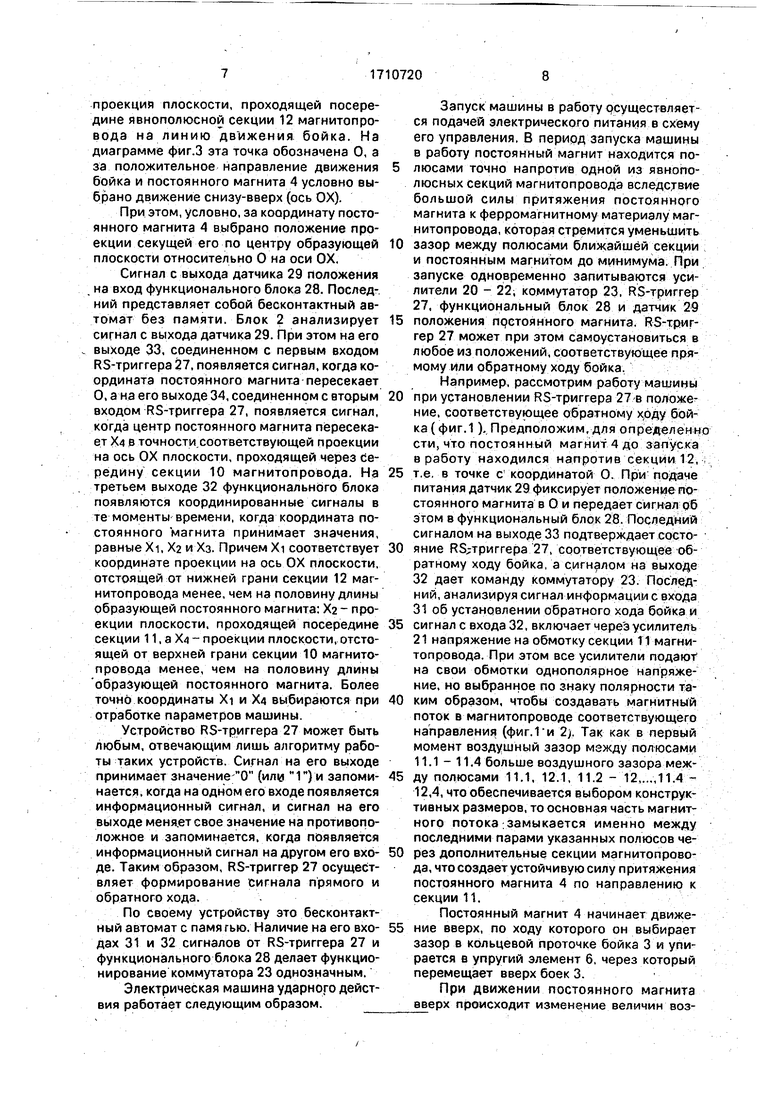
В задней части корпуса 1 для амортизации скорости бойка 3 при движении его на зад предусмотрена пружина 15, которая смонтирована на крышке 16, закрывающей заднюю часть корпуса 1. Подача машины на забой осуществляется нажатием на корпус. Выполнение каждой отдельно взятой явнополюсной секции магнитопровода на при мере секции 12 {фиг.2). Секция содержит ферромагнитные полюса 12,1 - 12.4, которые примыкают к кольцевому магнитопроводу, образующему между полюсами
магнитопроводящие перемычки 12.5 - 12.8. На полюса надеты катушки 12.9 - 12.12. Все катушки электрически соединены между собой в одну секцию статорной обмотки, которая коммутируется в строго заданное время при движении бойка.
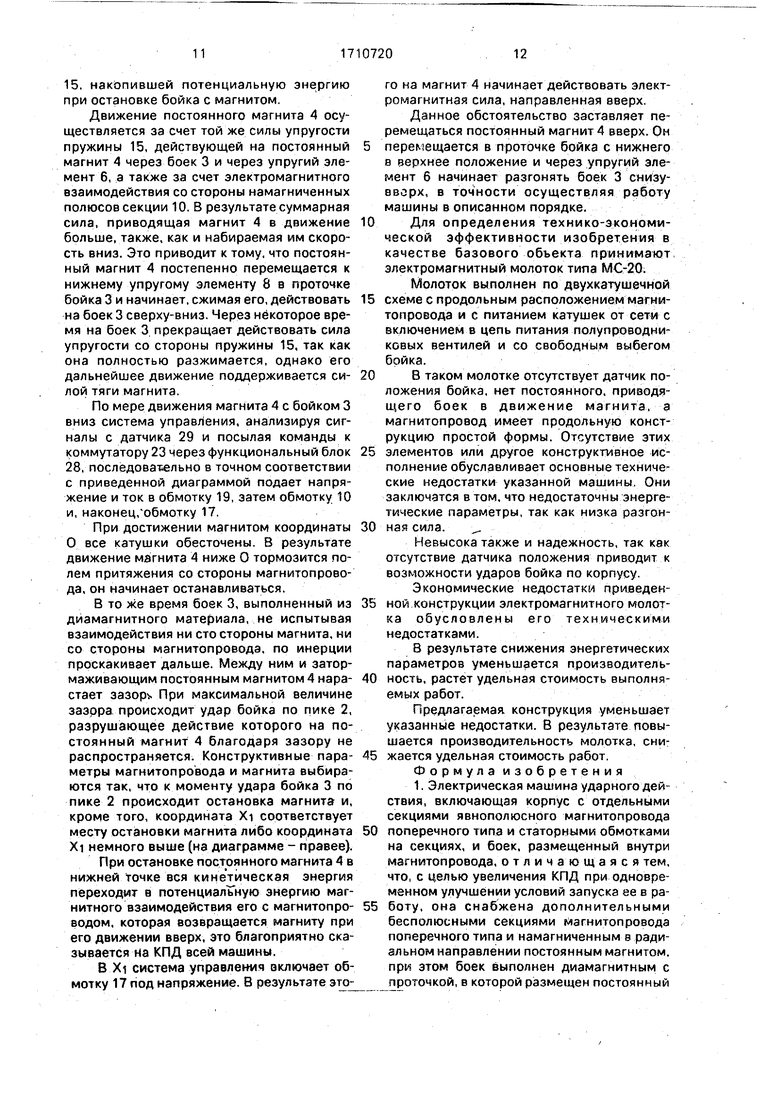
Электрическая машина ударного действия приводится в работу с помощью системы управления. В систему управления
0 входят секции 17 - 19 статорной обмотки, соединенные соответственно с выходами усилителей 20 - 22, служащими для обеспечения надежной коммутации секции статорной обмотки, коммутатор 23 с тремя
5 выходами 24 - 26, которые подключены к входам соответствующих усилителей, RSтриггер 27, функциональный блок 28, датчик 29 положения магнита 4 и блок 30 питания. Коммутатор 23 выполнен бесконтактным с
0 двумя входами: установочным 31 и информационным 32. К установочному входу 31 подключен выход RS-тиггера 27, а к информационному входу 32 подсоединен выход функционального блока 28. Вход RS-тригге5 ра 27 подсоединен к второму входу функционального блока 28, вход которого в свою очередь соединен с выходом датчика 29. Все указанные устройства запитаны от блока 30 питания.
0 Кроме того, приведена диаграмма (фиг.З) подачи напряжений U24, Uas и U26 в соответствующие секции статорной обмотки в зависимости от положения постоянного магнита X относительно секций статорной
5 обмотки магнитопровода. При этом напряжение на секции на прямом ходе показаны сплошной линией, а на обратном ходе пунктирной линией. Как видно из приведенной диаграммы подача напряжения в секции статорной обмотки осуществляется на прямом и обратном ходе бойка 3 в различных местоположениях постоянного магнита относительно соответствующих секций статорной обмотки магнитопровода. Это дела5 ется для обеспечения высокой тяговой
характеристики постоянного магнита при
- его движении внутри магнитопровода как
при прямом, так « при обратном ходе.
Основной задачей системы управления
0 помимо запуска машины в работу является обеспечение, именно, высоких тяговых характеристик постоянного магнита на прямом и обратном ходе бойка. Достигается это за счет датчика 29 положения, RS-триггера
5 27 и коммутатора 23. При этом датчик положения устроен так, что на его выходе присутствует сигнал, пропорциональный положению магнита 4 относительно некоторой фиксированной точки магнитопровода. Такой точкой может быть, например.
проекция плоскости, проходящей посередине явнополюсной секции 12 магнитопровода на линию движения бойка. На диаграмме фиг.З эта точка обозначена О, а за положительное направление движения бойка и постоянного магнита 4 условно выбрано движение снизу-вверх (ось ОХ).
При этом, условно, за координату постоянного магнита 4 выбрано положение проекции секущей его по центру образующей плоскости относительно О на оси ОХ.
Сигнал с выхода датчика 29 положения на вход функционального блока 28. Послед-. НИИ представляет собой бесконтактный автомат без памяти. Блок 2 анализирует сигнал с выхода датчика 29. При этом на его выходе 33, соединенном с первым входом RS-триггера 27, появляется сигнал, когда координата постоянного магнита пересекает О, а на его выходе 34, соединенном с вторым входом RS-триггера 27, появляется сигнал, когда центр постоянного магнита пересекает Х4 в точности,соответствующей проекции на ось ОХ плоскости, проходящей через Середину секции 10 магнитопровода. На третьем выходе 32 функционального блока появляются координированные сигналы в те моменты времени, когда координата постоянного магнита принимает значения, равные Xi, Х2 и Хз. Причем Xi соответствует координате проекции на ось ОХ плоскости, отстоящей от нижней грани секции 12 магнитопровода менее, чем на половину длины образующей постоянного магнита: Х2 - проекции плоскости, проходящей посередине секции 11, а - проекции плоскости, отстоящей от верхней грани секции 10 магнитопровода менее, чем на половину длины образующей постоянного магнита. Более точно координаты Xi и Х4 выбираются при отработке параметров машины.
Устройство RS-триггера 27 может быть любым, отвечающим лишь алгоритму работы таких устройств. Сигнал на его выходе принимает значение; 0 (или 1)и запоминается, когда на одном его входе появляется информационный сигнал, и сигнал на его выходе меняет свое значение на противоположное и запоминается, когда появляется информационный сигнал на другом его входе. Таким образом, RS-триггер 27 осуществляет формирование сигнала прямого и обратного хода..
По своему устройству это бесконтактный автомат с памягью. Наличие на его входах 31 и 32 сигналов от RS-триггера 27 и функционального блока 28 делает функционирование коммутатора 23 однозначным.
Электрическая машина ударного действия работает следующим образом.
Запуск машины в работу рсуществляет ся подачей электрического питания в схему его управления. В перирд запуска машины в работу постоянный магнит находится полюсами точно напротив одной из явнополюсных секций магнитопровода вследствие большой силы притяжения постоянного магнита к ферромагнитному материалу магнитопровода, которая стремится уменьшить
0 зазор между полюсами ближайшей секции и постоянным магнитом до минимума. При запуске одновременно запитываются усилители 20 - 22, коммутатор 23. RS-триггер 27. функциональный блок 28 и датчик 29
5 положения постоянного магнита. RS-триггер 27 может при этом самоустановиться в любое из положений, соответствующее прямому или обратному ходу бойка.
Например, рассмотрим работу машины
0 при установлении RS-триггера 27В пол ожение, соответствующее обратному х,64у бойка (фиг.1), Предположим, для определённо сти, что постоянный магнит 4 до запуска в работу находился напротив секции 12, i
5 т.е. в точке с координатой О. При Г1одаче питания датчик 29 фиксирует п оложение постоянного магнита в О и передает сигнал Об этом в функциональный блок 28. Последний сигналом на выхо/;е 33 подтверждает сорто0 яние RSлpиггepa 27, соответствующее обратному ходу бойка, а сигналом на выходе 32 дает команду коммутатору 23. Последний, анализируя сигнал информации с В1хода 31 об установлении обратного хода бойка и
5 сигнал с входа 32, включает через усилитель 21 напряжение на обмотку секции 11 магнитопровода. При этом все усилители подают на свои обмотки однополярное напряжение, но выбранное по знаку полярности та0 КИМ образом, чтобы создавать магнитный поток в магнитопроводе соответствующего направления (фиг.1и 2). Так как в первый момент воздушный зазор между полюсами 11.1 - 11.4 больше воздушного зазора между полюсами 11.1, 12.1, 11.2 - 12,...,11.4 12,4, что обеспечивается выбором конструктивных размеров, то основная часть магнитного потока; замыкается именно между последними парами указанных полюсов через дополнительные секции магнитопровода, что создает устойчивую силу притяжения постоянного магнита 4 по направлению к секции 11.
Постоянный магнит 4 начинает движение вверх, по ходу которого он выбирает зазор в кольцевой проточке бойка 3 и упи рается в упругий элемент 6. через который перемещает вверх боек 3.
При движении постоянного магнита вверх происходит изменение величин воздушных зазоров. Так воздушные зазоры между полюсами 11.1 и 11,4 уменьшаются, а воздушные зазоры между парами полюсов 11.1 - 12.1,...,11.4 - 12.4 сначала уменьшаются, а затем увеличиваются. Это автомати чески приводит к перераспределению ;магнитного потока, который в значительной степени замыкается так, как показано на фиг.2. Однако н.а направление тягового усилен;ия со стороны постоянного магнита перераспределение потока практически не отражается, так как и в этом случае взаимодействие линий магнитного поля вызывает необходимое силовое воздействие по направлени1р вверх. Следовательно,, наличие дополнительной бесполюсной секции 14 магнитопровода между явнополюсными секциями 12 и 11 позволяет за счет автоматиче ского перераспределения магнитного потока сначала между продольно располо же нными, а затем и поперечно расположен1ЧЫМИ соседними полюсами без изменения знака питающего напряжения организовать устойчивую силу тяги постоянного магнита 4, даже в тот момент времени, когда он находится в покое в сечении секции 11 и зазор между его боковой поверхностью и полюсами секции 11 минимален. Кроме того, суммарная сила тяги, вследствие радиального расположения полюсов магнита, больше суммы усилий на магнит, чем при исггользовании конструкций магнитопровода только с поперечным или только продольным расположением полюсов. ; ЕСЛИ дополнительная бесполюсная секция 14 отсутствует между явнополюскыми секциями 12 и 11, то запуск машины затруднен. Просто подача напряжения и тока любого знака, например, в обмотку секции 12 не сдвигает постоянный магнит из положения устойчивого равновесия, которое он занимает до этого. Не приводит к успеху и подача напряжения, а значит, и тока в об-i мртку секции 11, конструктивно находящейся от секции 12 на расстоянии не менее ДВОЙНОЙ толщины намотки обмоток секций и не более длины магнита (в против ном случае, он просто либо не двигается, либо не набирает достаточной энергий), так как в этом случае магнитный поток от рбмоток секции 11 просто замыкается трлько через постоянный магнит. Если удается какимилибо внешними силами (например, встряхиванием) привести магнит в движение и сместить его немного вверх относительно О, то его дальнейшее движение в этом направлении может осуществляться относительно секцу)и 12 токрм одной полярности (выталKHBcTkHe из секции 12), а приближение к секции 11 (втягивание в секцию 1.1) - током другой полярности. Затем опять следуют процессы выталкивания и втягивания, но уже на следующей паре секций 11 - 10. После достижения магнитом 4 при его движении вверх координаты Ха на выходе функционального блока 28 появляется соответствующий информацирнный сигнал, который дает команду коммутатору 23,на переключение напряжения с обмотки 18 на обмотку 19, К моменту достижения магнитом 4 положения Ха сила его тяги падает до О, так как Х2 - это одно из положений устойчивого равновесия магнита 4 в магнитопроводе. Поэтому переключение напряжений с об- мотки 18 на обмотку 19 приводит к поддержанию силы тяги на необходимом уровне, но уже за счет перераспределения магнитного потока между полюсами секций 11 и 10 магнитопровода. При достижений магнитом Хз функциональный блок 28 выдает об этом соответствующий сигнал, который дает команду коммутатору 23 на отключение питания всех обмоток. Кроме того, сигнал, с выхода 34, который появится при этом, перебрасывает RS-триггер 27 в новое положение, соответствующее прямому ходу бойка 3. Дальнейшее движение вверх постоянного магнита 4 вместе c-бoйkoм 3 происходит по инерции, постоянно замедляясь под действием силы упругости пружины 15 и силы взаимодействия (притяжения) полюсов постоянного магнита 4 и соответствующих полюсов Секции 10 ферромагнитного магнитопровода. В какой-то момент времени магнит с бойком останавливаются в верхней точке, когда вся их совместная кинетическая энергия переходит в потенциальную энергию сжатой пружины и потенциальную энергию магнитной системы магнит-магнитопровод. Конструктивно параметры пружины 15 выбирают так, что координата остановки постоянного магнита 4 в верхней точке соответствует Х4 или чуть выше (по диаграм ме на оси ОХ чуть правее) Х4. В Х4 датчик 29 положения постоянного магнита задействует функциональный блок 28 так, что на его выходе 32 появляется соответствующий сигнал. Коммутатор 23 проанализирует данный сигнал, а также сигнал о состоянии RS-триггера 27. В результате этого коммутатор 23 через усилитель 2 начинает подавать напряжение на обмотку 19, находящуюся на секции Юмагнитопро вода. Начинается движение бойка 3 и постоянного магнита 4 вниз. При этом первоначально движение бойка 3 осуществляется за счет силы упругости пружины
15, накопившей потенциальную энергию при остановке бойка с магнитом.
Движение постоянного магнита 4 осуществляется за счет той же силы упругости пружины 15, действующей на постоянный магнит 4 через боек 3 и через упругий элемент 6, а также за счет электромагнитного взаимодействия со стороны намагниченных полюсов секции 10. В результате суммарная сила, приводящая магнит 4 в движение больше, также, как и набираемая им скорость вниз. Это приводит к тому, что постоянный магнит 4 постепенно перемещается к нижнему упругому элементу 8 в проточке бойка 3 и начинает, сжимая его, действовать на боек 3 сверху-вниз. Через некоторое время на боек 3 прекращает действовать сила упругости со стороны пружины 15, так как она полностью разжимается, однако его дальнейшее движение поддерживается силой тяги магнита.
По мере движения магнита 4 с бойком 3 вниз система управления, анализируя сигналы с датчика 29 и посылая команды к коммутатору 23 через функциональный блок 28, последовагельно в точном соответствии с приведенной диаграммой подает напряжение и ток в обмотку 19, затем обмотку 10 и, наконец,обмотку 17.
При достижении магнитом координаты О все катушки обесточены. В результате движение магнита 4 ниже О тормозится полем притяжения со стороны магнитопровода, он начинает останавливаться.
В то же время боек 3, выполненный из диамагнитного материала, не испытывая взаимодействия ни сто стороны магнита, ни со стороны магнитопровода, по инерции проскакивает дальше. Между ним и затормаживающим постоянным магнитом 4 нарастает зазор . При максимальной величине зазрра происходит удар бойка по пике 2, разрушающее действие которого на постоянный магнит 4 благодаря зазору не распространяется. Конструктивные параметры магнитопровода и магнита выбираются так, что к моменту удара бойка 3 по пике 2 происходит остановка магнита и, кроме того, координата Xi соответствует месту остановки магнита либо координата Xi немного выше (на диаграмме - правее). При остановке постоянного магнита 4 в нижней точке вся кинетическая энергия переходит в потенциальную энергию магнитного взаимодействия его с магнитопроводом, которая возвращается магниту при его движении вверх, это благоприятно сказывается на КПД всей машины.
В Xi система управления включает обмотку 17 под напряжение. В результате этр
го на магнит 4 начинает действовать электромагнитная сила, направленная вверх.
Данное обстоятельство заставляет перемещаться постоянный магнит 4 вверх. Ом перемещается в проточке бойка с нижнего в верхнее положение и через упругий элемент 6 начинает разгонять боек 3 снизувворх, в точности осуществляя работу машины в описанном порядке.
Для определения технико-экономической эффективности изобретения в качестве базового объекта принимают электромагнитный молоток типа МС-20.
Молоток выполнен по двухкатушечной схеме с продольным расположением магнитопровода и с питанием катушек от сети с включением в цепь питания полупроводниковых вентилей и со свободным выбегом бойка.
В таком молотке отсутствует датчик положения бойка, нет постоянного, приводящего боек в движение магнита, а магнитопровод имеет продольную конструкцию простой формы. Отсутствие этих элементов или конструктивное исполнение обуславливает основные техниче ские недостатки указанной машины. Они заключатся в том, что недостаточны энергетические параметры, так как низка разгонная сила.
Невысока также и надежность, так как отсутствие датчика положения приводит к возможности ударов бойка по корпусу.
Экономические недостатки приведенной конструкции электромагнитного молотка обусловлены его техническим;и недостатками.
В результате снижения энергетических параметров уменьшается производительность, растет удельная стоимость выполняемых работ.
Предлагаемая конструкция уменьшает указаннь е недостатки. В результате повышается производительность молотка, снижается удельная стоимость работ.
Формула изобретения
7
Xf
п. 2
J2.6
13
Риг.З 2. Машина по п.1, о т л и ч а ю щ а яся тем, что статорные обмотки размещены на полюсах магнитопровода.
| Электроударный механизм | 1986 |
|
SU1361321A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Введение в теорию энергопреобразо&ания электромагнитных и/йшин.-М.: Наука, 1987^ с | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
