(Л
ф
со |
со
4
.
Изобретение относится к грузозахватным устройствам, применяемым при строительстве зданий, сооружений, преимущественно промышленных.
Цель изобретения - повышение надежности.
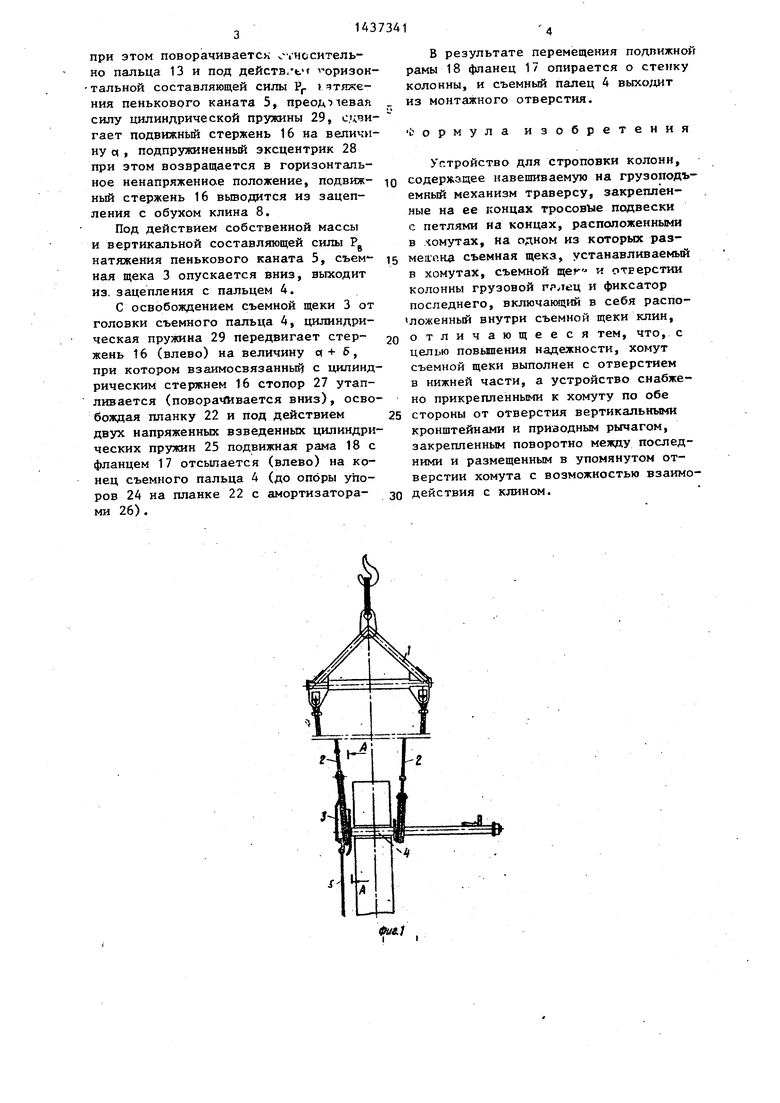
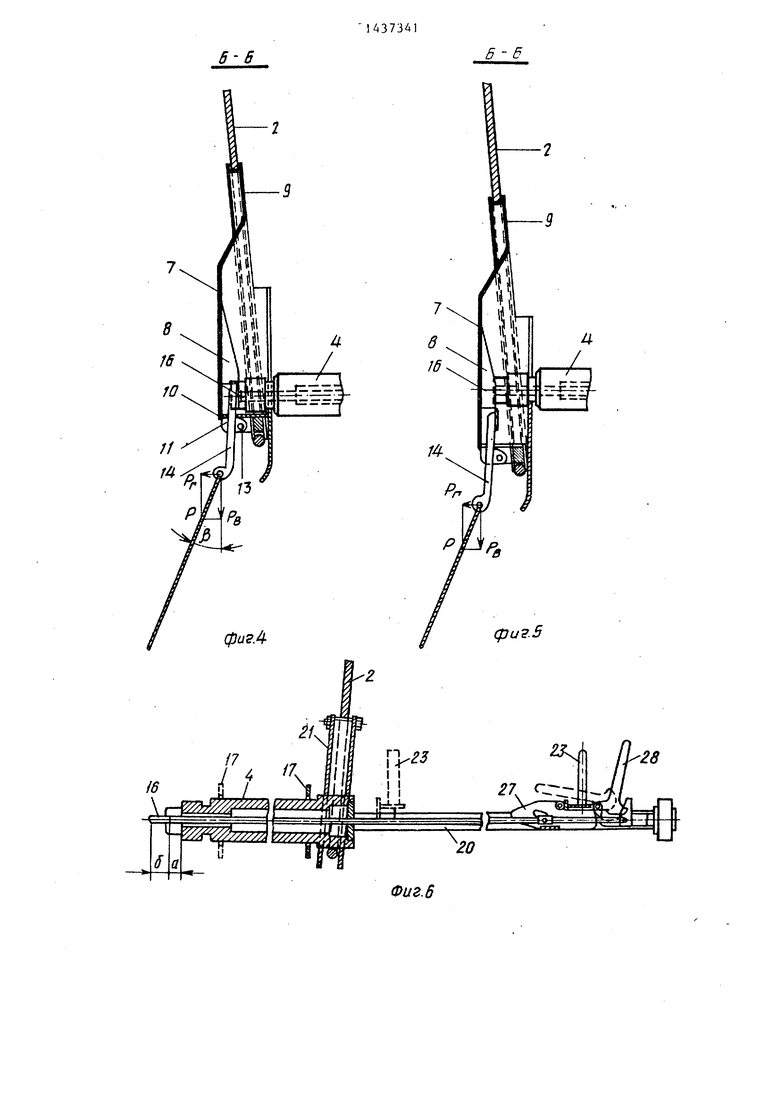
На фиг. 1 изображен общий вид устройства для строповки колонн; на фиг. 2 - разрез А-А на фиг. 1j на JQ фиг. 3 - разрез Б-Б на фиг. 2, в ра- ёочем положении; на фиг. 4 - то же, фъемная щека в момент начала расстро- устройства (опорная плоскость йерхней части двуплечего рычага вырав- з установленных в неподвижных тру- яена с помощью клина); на фиг. 5 - бах 20, закрепленных при помощи косыВерхнее плечо двуплечего рьгчага 14 пропущено сквозь отверстие 10 во внутреннюю полость съемной щеки 3 до упора с обухом клина 8, а в нижней части двуплечего рычага 14 выполнено отверстие 15 для крепле ния пенькового каната 5.
В съемном пальце 4 размещен подвижный съемньй стержень 16, стопорящий съемную щеку 3.
На съемном пальце 4 смонтирован фланец 17, являющийся частью подвижной рамы 18, состоящий из двух труб
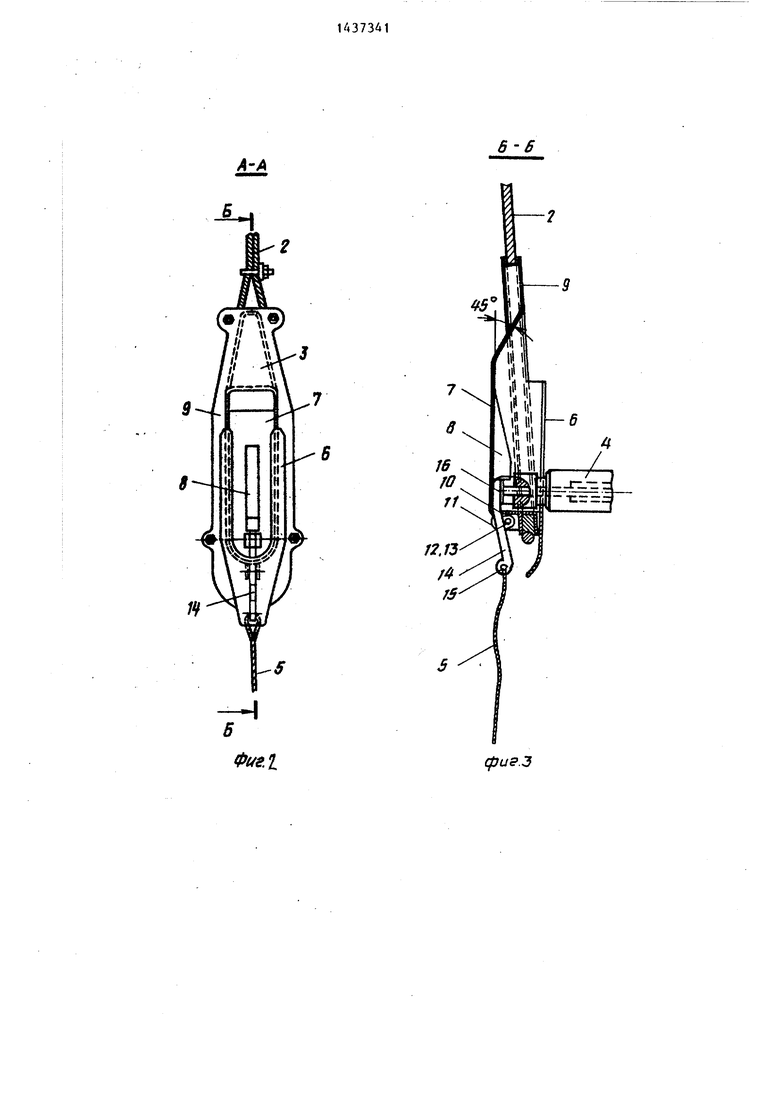
то же, стержень в полом пальце вьшел из зацепления (стопорення) с клином Аа щеке; на фиг. 6 - продольный разрез пальцу с механизмом его вытаскивания из монтажного отверстия колон- ы; на фиг. 7 - палец с механизмом ытаскивания, вид сверху; на фиг. 8 - и 9 - отдельные узлы устройства; на фиг. 10 - узел крепления двуплечего |)ычага к съемной щеке. i Устройство для строповки колонн Содержит траверсу 1, тросовые подвески 2, съемную щеку 3, съемный палец 4, пеньковый канат (трос) 5. Съемная щека 3 представляет собой (Цельносварную конструкцию, содержит рилку 6 для захода головки (венца) ръемного пальца 4, нижняя часть вилки fe отогнута по дуге для облегчения Съема щеки 3 с пальца 4 при расстро- . повке. Задняя стенка 7 съемной щеки 3 в верхней части отогнута под углом АЗ, чем обеспечивается автоматический выход съемной щеки 3 при расстро- повке от головки съемного пальца 4. Во внутренней полости на задней стенке 7 на оси симметрии закреплен клин 8, обух которого является стопором, предотвращающим расстроповку при случайном ослаблении тросовых подвесок 2.
Для придания жесткости съемной щеке 3 и для крепления тросовой подвески 2 съемная щека 3 дополняется хому- 0 том 9.
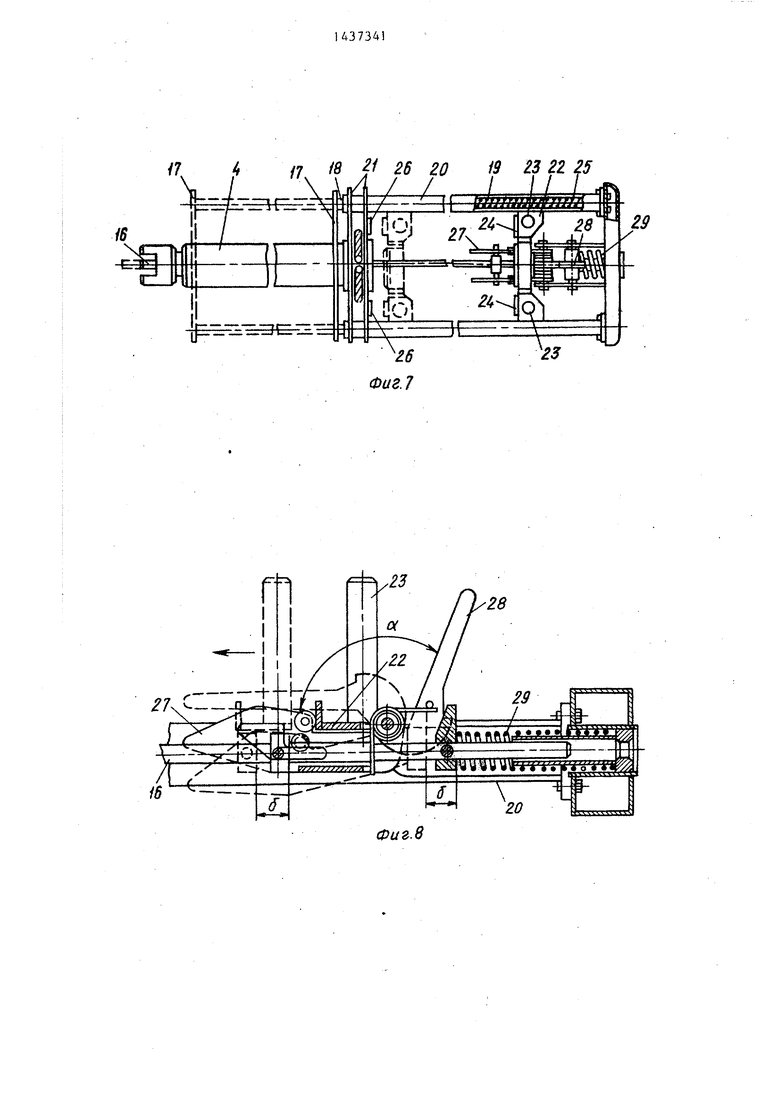
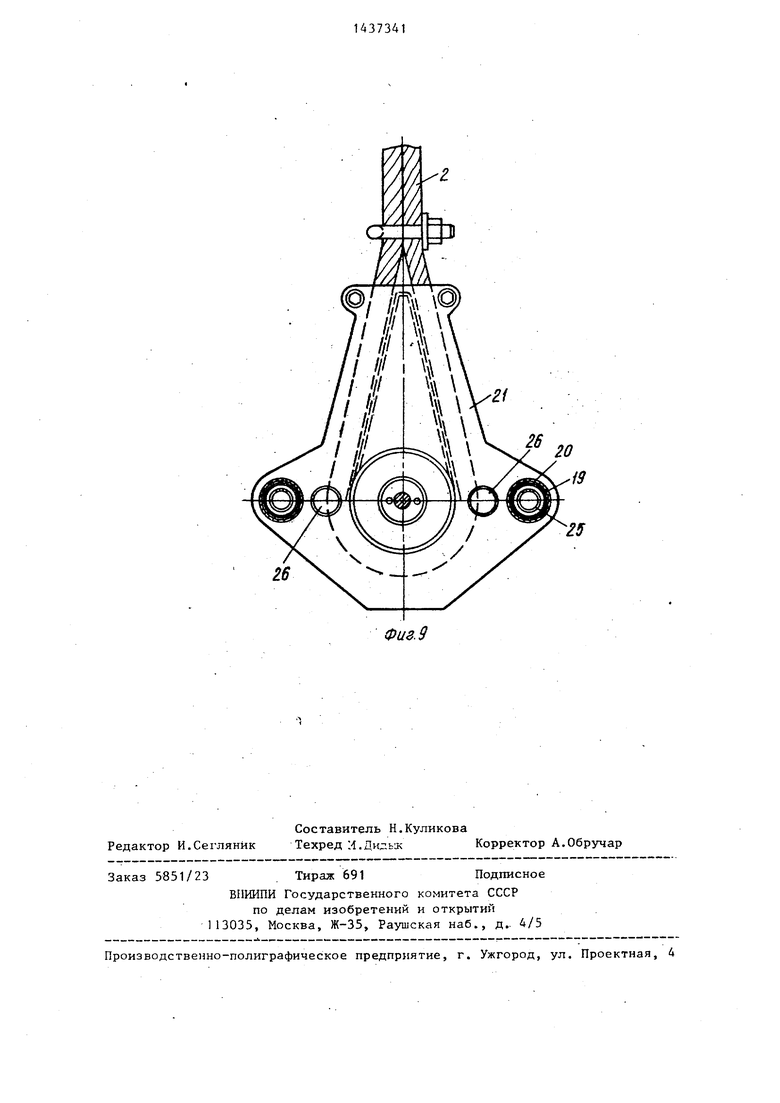
В нижней части хомута 9 съемной щеки 3 выполнено отверстие 10 и с двух сторон прикреплены два кронштейнок 21 на съемнрм пальце 4 (фиг.9). С противоположной стороны трубы 20 подвижной рамы 18 соединены план- 20 Kofr 22, на которой смонтированы две рукоятки 23 и два упора 24.
В трубах 19 подвижной рамы 18 установлены две цилиндрические пружины 25. На одной из косынок 21 закрепле- 25 ны резиновые амортизаторы 26. Для
согласованности работы подвижной ра- мы 18 и стопора 27 устройство имеет эксцентрик 28.
До строповки съемный палец 4 и 3Q съемная щека 3 свободно висят на тросовых подвесках 2. При этом,элементы приспособления находятся в следующем положений. Подвижная рама 18 с фланцем 17 планкой 22 и рукояткой 23 находится, в переднем положе35
40
45
на 11 с соосными горизонтальнь ми от верстиями 12, между которыми с ограниченным поворотом с помощью пальца 13 установлен двуплечий рьгеаг 14.
55
НИИ, показанном на фиг. 6 и 7 пунктиром.
Под действием цилиндрической пру жины 29 подвижный стержень 16 вьщви- нут на величину о+ 6 , Стопор 27 и Эксцентрик 28 находятся в положении, изображенном на фиг. 8 (пунктиром).
При строповке, преодолевая силу цилиндрической пружины 29 эксцентрик 28 поворачивается на угол о(, в ре-- зультате этого подвижный стержень 16 передвигается на величину сГ, стопор 27 принимает горизонтальное положение. Преодолевая силу цилиндрической пружины 25, подвижная рама 18 переводится в крайнее правое положение и фиксируется стопором 27.
Съемный палец 4 вводится в монтажное отверстие колонны (не показано), на головку съемного пальца 4 заводится вилка 6 съемной щеки 3 .
При расстроповке натягивается
пеньковый канат 5 силой Р под углом
РОТ вертикали. Двуплечий рычаг 14
установленных в неподвижных тру- бах 20, закрепленных при помощи косыВерхнее плечо двуплечего рьгчага 14 пропущено сквозь отверстие 10 во внутреннюю полость съемной щеки 3 до упора с обухом клина 8, а в нижней части двуплечего рычага 14 выполнено отверстие 15 для крепле ния пенькового каната 5.
В съемном пальце 4 размещен подвижный съемньй стержень 16, стопорящий съемную щеку 3.
На съемном пальце 4 смонтирован фланец 17, являющийся частью подвижной рамы 18, состоящий из двух труб
0
нок 21 на съемнрм пальце 4 (фиг.9). С противоположной стороны трубы 20 подвижной рамы 18 соединены план- 0 Kofr 22, на которой смонтированы две рукоятки 23 и два упора 24.
В трубах 19 подвижной рамы 18 установлены две цилиндрические пружины 25. На одной из косынок 21 закрепле- 5 ны резиновые амортизаторы 26. Для
согласованности работы подвижной ра- мы 18 и стопора 27 устройство имеет эксцентрик 28.
До строповки съемный палец 4 и Q съемная щека 3 свободно висят на тросовых подвесках 2. При этом,элементы приспособления находятся в следующем положений. Подвижная рама 18 с фланцем 17 планкой 22 и рукояткой 23 находится, в переднем положе5
0
5
5
НИИ, показанном на фиг. 6 и 7 пунктиром.
Под действием цилиндрической пру жины 29 подвижный стержень 16 вьщви- нут на величину о+ 6 , Стопор 27 и Эксцентрик 28 находятся в положении, изображенном на фиг. 8 (пунктиром).
При строповке, преодолевая силу цилиндрической пружины 29 эксцентрик 28 поворачивается на угол о(, в ре-- зультате этого подвижный стержень 16 передвигается на величину сГ, стопор 27 принимает горизонтальное положение. Преодолевая силу цилиндрической пружины 25, подвижная рама 18 переводится в крайнее правое положение и фиксируется стопором 27.
Съемный палец 4 вводится в монтажное отверстие колонны (не показано), на головку съемного пальца 4 заводится вилка 6 съемной щеки 3 .
При расстроповке натягивается
пеньковый канат 5 силой Р под углом
РОТ вертикали. Двуплечий рычаг 14
при этом поворачивается оч носитель- но пальца 13 и под действ.-ьч оризок- тальной составляющей силы Р чтяже- ния пенькового каната 5, преод яевап силу цилиндрической пружины 29, сдвигает подвижньй стержень 16 на величину ск , подпружиненный эксцентрик 28 при этом возвращается в горизонтальное ненапряженное положение, подвижный стержень 16 выводится из зацепления с обухом клина 8.
Под действием собственной массы и вертикальной составляющей силы Р натяжения пенькового каната 5, ная щека 3 опускается вниз, выходит из. зацепления с пальцем 4.
С освобождением съемной щеки 3 от головки съемного пальца 4, цилиндрическая пружина 29 передвигает стержень 16 (влево) на величину q + 6, при котором взаимосвязанный с цилиндрическим стержнем 16 стопор 27 утапливается (повора Л вается вниз), освобождая планку 22 и под действием двух напряженных взведенных цилиндрических пружин 25 подвижная рама 18 с фланцем 17 отсьшается (влево) на конец съемного пальца 4 (до опоры упоров 24 на планке 22 с амортизаторами 26) .
В результате перемещения подпижной рамы 18 фланец 17 опирается о стенку колонны, и съемный палец 4 выхо/ т из монтажного отверстия.
Формула изобретения
Устройство для строповки колонн,
содержащее навешиваемую на грузоподъемный механизм траверсу, закрепленные на ее концах rpocoBbie подвески с петлями на концах, расположенными в чомутах, на одном нз которых размеач.на съемная щека, устанавливаемый в хомутах, съемной щег к отнерстии колонны грузовой Гг- лец и фиксатор последнего, включающий в себя распо- ложенный внутри съемной щеки клин,
отличающееся тем, что, с целью повышения надежности, хомут съемной щеки выполнен с отверстием в нижней части, а устройство снабже но прикрепленными к хомуту по обе
стороны от отверстия вертикальными кронштейнами и приводным рычагом, закрепленным поворотно между последними и размещенным в упомянутом отверстии хомута с возможностью взаимодействия с клином.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИСПОСОБЛЕНИЕ ДЛЯ СТРОПОВКИ КОЛОНН | 1971 |
|
SU301307A1 |
| УСТРОЙСТВО для СТРОПОВКИ колонн | 1971 |
|
SU315683A1 |
| Устройство для монтажа колонн с консолями | 1986 |
|
SU1408038A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ СТРОПОВКИ КОЛОНН | 1964 |
|
SU164661A1 |
| Устройство для монтажа колонн с консолями | 1990 |
|
SU1760054A2 |
| Устройство для подъема вертикальных конструкций | 1984 |
|
SU1239077A1 |
| Стопорное устройство для закрытия ангара | 1979 |
|
SU893683A1 |
| СТРОП ДЛЯ ПОДЪЕМА ГРУЗА | 1965 |
|
SU175631A1 |
| Подвесное устройство для кабины подъемника | 1980 |
|
SU1031865A1 |
Изобретение относится к подъемно-транспортной технике, в частности к устройствам для строповки колонн. Целью изобретения является повыпенне надежности. Устройство для строповки колонн содержит траверсу. На концах траверсы закреплены тросовые подвески 2, расположенные в хомутах . На одном из хомутов закреплена съемная щека. В хомутах, съемной В(еке и отверстии колонны устанавливается грузовой палец 4, фиксируемьА с помощью клина 8, размещенного в съемной щеке 3. Хомут съемной щеки вьшолнен в нижней части с отверстием 10. В отверстии 10 размещен приводной рычаг 14j прикрепленный к хомуту посредством кронштейнов 11. Рычаг 14 взаимодействует с клином 8. 10 ил. (С
Фиг.1
(риг.З
Ю
фи 3.5
Фиг. 6
/5
V
-е
Я
/7, п 18 / ге го is гз zz 2s V 1 iЛ / / / // f
JJ---f - -t г- r- г
г uc::z-E
5
Фиг. 8
Фаз. 9
| ПРИСПОСОБЛЕНИЕ ДЛЯ СТРОПОВКИ КОЛОНН | 0 |
|
SU301307A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
