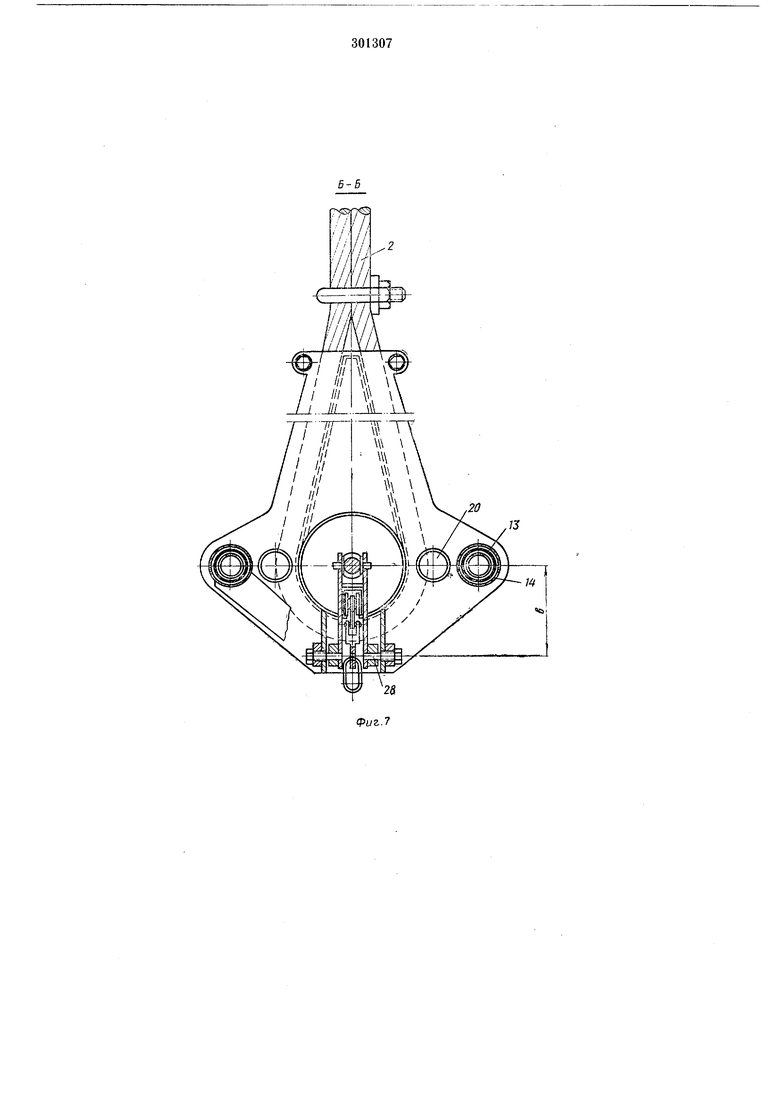
Изобретение относится к грузозахватным устройствам, применяемым при строительстве зданий или сооружений. По основному авт. св. ЛЬ 159009 известно приспособление для строповки колонн с меха- 5 низмом вытаскивания пальца, выполненным в виде двух труб, жестко соединенных сфлднцами пальца. Внутри труб размещены пружины. В случае, когда замок закрыт, пружины слсаты. При снятии замка пружины разжи- 10 маются, и под действием их силы палец вытягивается из отверстия автоматически. Однако застропленная и поднятая колонна оказывается зажатой пружинами между телескопическими трубами и съемной щекой, что 15 затрудняет съем щеки при дистанционной раестроповке колонны. Целью изобретения является повышение надежности приспособления и улучщение его эксплуатационных качеств путем предотвра- 20 щения зажатия застропованной колонны, а также самопроизвольной расстроповки поднятой колонны. Это достигается тем, что в приспособлении механизм автоматического вытаскивания пальца выполнен в виде подвижной 25 рамы, состоящей из опорного фланца и планки, соединяющих между собой параллельные направляющие трубы. Палец выполнен полым и снабл ен размещенным в нем стержнем с двумя венчиками и упором. Задняя стенка 30 съемной щеки снабл ена клином с гребнем, а верхняя часть стенки отогнута под некоторым углом внутрь. На передней части съемной щеки смонтирован вилочный захват, нижняя часть которого отогнута по дуге. Кроме того, концы направляющих труб соединены защитным кожухом, в средней части которого имеются кронщтейны, щарнирно соединенные со стопором и эксцентриком, а между трубами на кожухе щарнирно закреплен вильчатый рычаг, снабженный кареткой с захватом и серьгой для троса дистанционной расстроповки и введенный в зацепление своей вилочной частью с пальцем. Па фиг. 1 изображено предлагаемое приспособление, общий вид; на фиг. 2 - съемная щека; на фиг. 3-6 - отдельные узлы приспособления; на фиг. 7 - то же, разрез по Б-Б. Приснособление содержит траверсу /, тросовые подвески 2, съемную щеку 5, снабженную клиновым стопором, съемный палец 4 и пеньковый канат (трос) 5. Съемная щека, представляющая собой цельносварную конструкцию, имеет вилку б для захода головки (венца) съемного пальца. часть вилки отогнута по дуге для облегчения съема щеки с пальца 4 при расстроповке. Задняя стенка 7 в верхней части отогнута под углом 45°, чем обеспечивается авто3магический выход щеки при расстроповке от головки пальца. Во виутренней полости на стенке 7 по оси симметрии закреплен клин 8, обух которого является стопором, предотвращающим рас-5 строповку при случайном ослаблении тросовых подвесок 2. Для придания жесткости съемной щеке и для крепления тросовой подвески съемная щека дополняется хомутом 9. В полом пальце 4 размещен подвижныйЮ стержень 10, стопорящий съемную щеку. На пальце смонтирован фланец //, являющийся частью подвижной рамы 12, состоящей из двух труб 13, установленных в неподвижных трубах 14, закрепленных при помощи косы-15 нок 15 на пальце 4. С противоположной стороны трубы подвижной рамы соединены планкой ;б, на которой смонтированы две рукоятки 17 и два упора 18. В трубах 14 рамы 12 установлены цилиндрические пружины 19. На20 одной из косынок 15 закреплены резиновые амортизаторы 20. Для согласованности работы подвижной рамы 12 и стопора 21 приспособление имеет эксцентрик 22. До строповки съемный палец 4 и съемная25 щека 3 свободно висят на тросовых подвесках 2. При этом элементы приспособления находятся в следующем положении: подвижная рама 12 с упорным фланцем 11, планкой 16 и рукояткой 17 находится в переднем положе-30 НИИ, показанном на фиг. 2 и 3 пунктиром. Под действием пружины 23 стержень 10 выдвинут на величину a-j-б. Стопор 21 и эксцентрик 22 находятся в положении, изображенном пунктиром на фиг. 5. Рычаг 24 повернут на угол а.35 Каретка 25 с захватом 26 и серьгой 27 находится в положении, показанном пунктиром. При строповке вводятся эксцентрик 22 и подвижная рама 12. Палец 4 вводится в монтажное отверстие колонны (на чертеже не по-40 казана), передвигается и ставится на стопор каретка 25, на головку пальца 4 заводится съемная щека 3. Посылая по ослабленному тросу волну, монтажник (строповщик) обеспечивает пово-45 4 рот захвата 26 против часовой стрелки, что приводит к перемещению каретки 25 по наклонной плоскости на величину а. При натяженин троса рычаг 24 поворачивается вокруг оси 28, плечом в перемещает стержень 10 вправо, при этом клин 8 на съемной щеке 3 при опускании крюка с траверсой выходит из зацепления с головкой пальца 4. При отделении съемной щеки от пальца трос дистанционного управления выпускается, и под действием пружины 23 стержень 10 досылается влево на величину а-{-б. Одновременно с этим пальцы на венчике 29 отжимают стопор 21 вниз, снимая взвод подвижной рамы 12, которая, опираясь фланцем 11 ъ колонну, вытаскивает палец из монтажного отверстия, „ Предмет изобретения Приспособление для строповки колонн по авт. св. № 159009, отличающееся тем, что, с целью повышения надежности приспособления и улучшения его эксплуатационных качеств путем предотвращения сжатия застропованной колонны и самопроизвольной расстроповки, механизм автоматического вытаскивания пальца выполнен в виде подвижной рамы, состоящей из опорного фланца и планки, соединяющих между собой параллельные направляющие трубы, палец выполнен полымиснабжен размещенным в нем стержнем с двумя венчиками и упором, задняя стенка съемной щеки снабжена клином с гребнем, верхняя часть стенки отогнута под некоторым углом внутрь, а на передней части съемной щеки закреплен вилочный захват, нижняя часть которого отогнута по дуге, причем концы направляющих труб соединены защитным кожухом. в средней части которого размещены кронщтеины, щарнирно соединенные со стопором и эксцентриком, а между трубами на кожухе шарнирно закреплен вильчатый рычаг, который находится в зацеплении с пальцем, и внутри рычага размещена каретка с захватом и серьгой для троса дистанционного управления.
Т-г
, I
А-Л
Фиг 2
15
7/
ц 10
ZZZklZJ
Фиг. 3

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для строповки колонн | 1987 |
|
SU1437341A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ СТРОПОВКИ КОЛОНН | 1964 |
|
SU164661A1 |
| УСТРОЙСТВО для СТРОПОВКИ колонн | 1971 |
|
SU315683A1 |
| Устройство для монтажа колонн с консолями | 1990 |
|
SU1760054A2 |
| НАВЕСНОЕ БУРОРЫХЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ПОГРУЗЧИКА | 1991 |
|
RU2011762C1 |
| Манипулятор для движения каретки тросового лифта вдоль троса | 2023 |
|
RU2823642C1 |
| ПЕРЕНОСНОЕ УСТРОЙСТВО ДЛЯ ВРЕМЕННОЙ ПОДВЕСКИ ОБОЖЖЕННЫХ АНОДОВ АЛЮМИНИЕВОГО ЭЛЕКТРОЛИЗЕРА | 1973 |
|
SU406951A1 |
| Наклонная подвесная канатная дорога | 1959 |
|
SU132558A1 |
| Захват для подъема колонн с консолями | 1981 |
|
SU1054271A1 |
| МАШИНА ДЛЯ РЕЗКИ ПОЛОТНА ПО БАХРОМЕ | 1966 |
|
SU185836A1 |



- 4r
