14404
полнительные датчики 26 и 27, последний из которых связан посредством пульсатора 19 с пневмоцилиндром 18. Датчики 26 и 27 сообщены также с доильными стаканами 14 передних и задних четвертей вымени. Данная конструкция обеспечивает при доении процесс
имитации сосания коровы теленком, эффективный массаж вымени и исключает наползание стаканов на соски, что увеличивает полноту выдаивания и исключает машинный додой. 2 з.п. ф-лы 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор доильной установки | 1988 |
|
SU1554841A1 |
| МАНИПУЛЯТОР ДЛЯ ДОЕНИЯ | 1999 |
|
RU2160526C1 |
| Манипулятор доильной установки | 1989 |
|
SU1699385A1 |
| Манипулятор доильной установки | 2024 |
|
RU2830908C1 |
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ДЛЯ ДОЕНИЯ КОРОВ | 2001 |
|
RU2221417C2 |
| ДОИЛЬНЫЙ АППАРАТ | 2016 |
|
RU2626169C2 |
| ДОИЛЬНЫЙ АППАРАТ | 1999 |
|
RU2169460C1 |
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ЛИНЕЙНОЙ ДОИЛЬНОЙ УСТАНОВКИ | 1999 |
|
RU2151499C1 |
| Манипулятор доильной установки | 1990 |
|
SU1750511A1 |
| Переносной манипулятор доения коров | 2023 |
|
RU2812332C1 |
Изобретение относится к сельскому хозяйству. Целью изобретения является повышение эффективности доения и эксплуатационной надежности.Несущая часть манипулятора состоит из пневмоцилиндра 1 с поршнем 2 и штоком 3. Массажирующее устройство содержит пневмоцилиндр 18, связанный с пульсатором 19, пружину 20 и держатель 21 доильных стаканов 14. Автомат управления имеет основной и до25 1 л -20 ел 11 4 о J ю 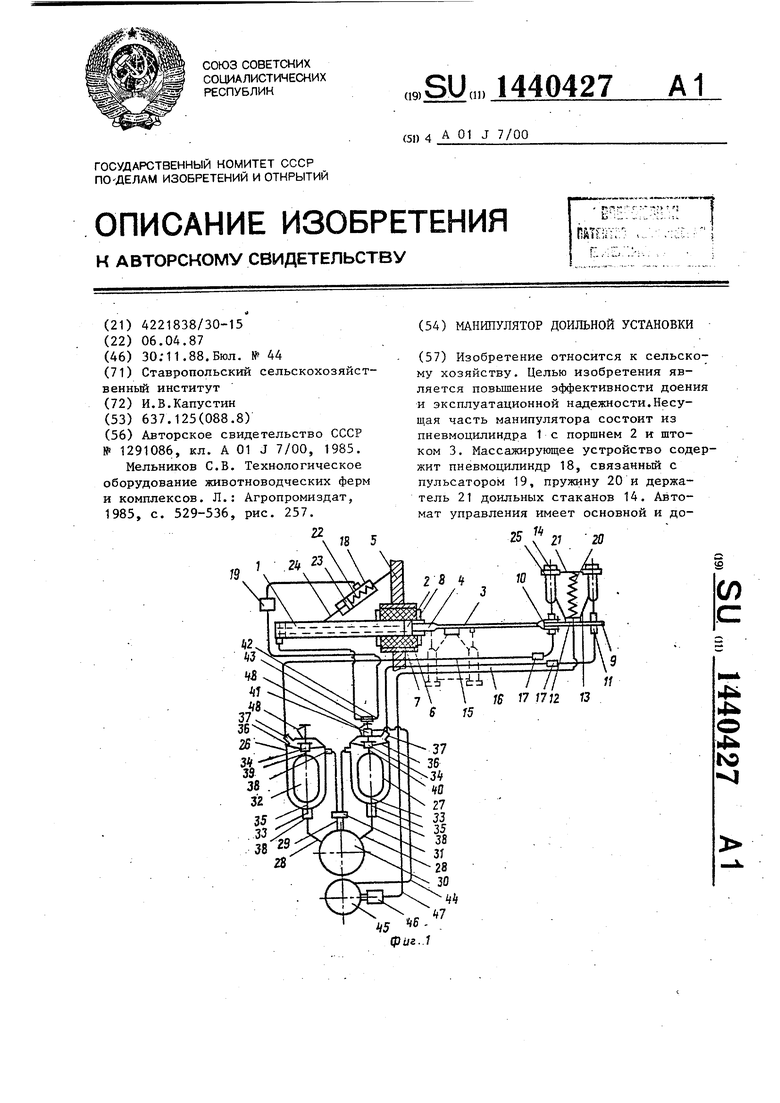
1
Изобретение относится к области сельского хоз-яйства, в частности к ма нипуляторам доильных установок.
Целью изобретения является повышение эффективности доения и.эксплуата- ционной надежности.
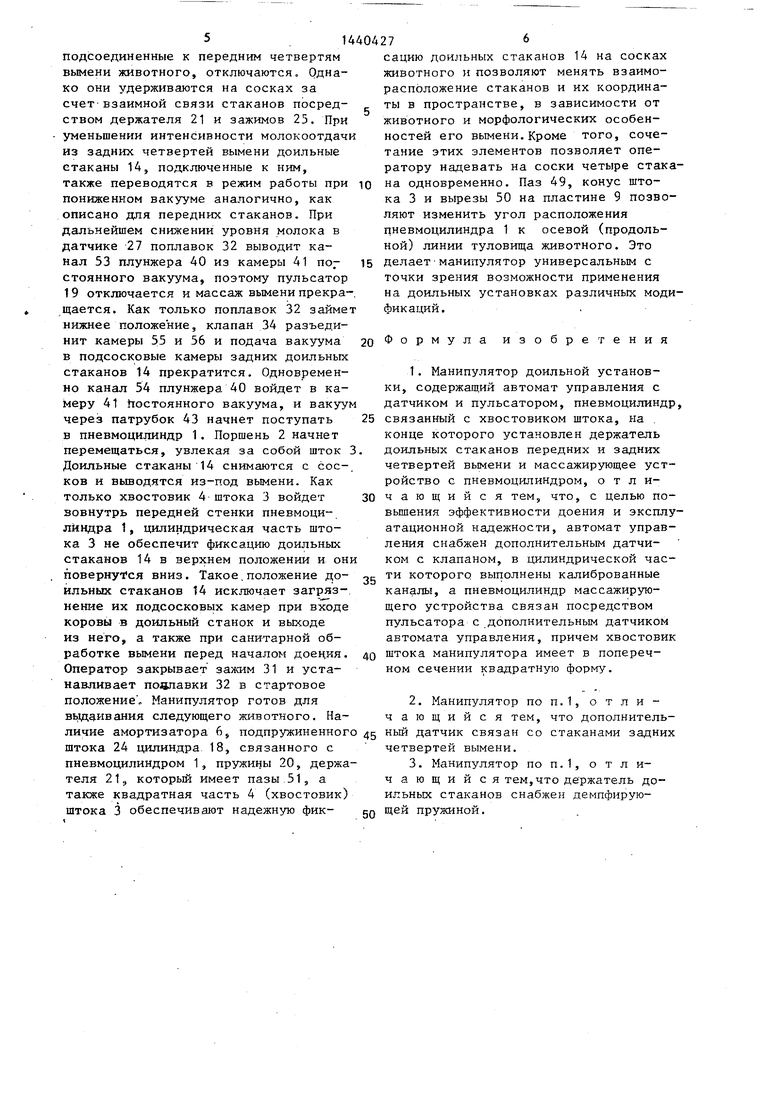
-На фиг.1 изображен общий вид манипулятора; на фиг.2 - пластина для крепления молочных трубок и распреде- лителя, вид сверху, на фиг, 3 - держа тель доильных стаканов, вид сверху на фиг.4 - общий вид дополнительного датчика. .
Манипулятор состоит из несущей части, массажирующего устройства и автомата управления.
Несущая часть манипулятора включает в себя пневмоцилиндр 1 с поршнем 2 и штоком 3, основная часть которого в поперечном сечении выполнена ци- линдрической формы, хвостовик 4, свя- занньй с поршнем 2, выполнен квадратным. Крепление пневмоцилиндра 1 к доильному станку 5 обеспечивается с помощью амортизатора 6, размещенного в трубе 7-, и ограничительных колец 8, Со штоком 3 соединена пластина 9 двумя шпильками 10. К пластине 9 прикреплены молочные трубки 11 и распределитель 12, который воздушными трубками 13 соединен с межстенными камерами стаканов 14. Молочные трубки 11 соединены попарно с молочными шлангами 15 и 16 с помощью тройников 17.
МгсС.сажирующее устройство состоит из пневмоцилиндра 18, связанного с пульсатором 19, пружины 20 и держателя 21 доильных стаканов 14. ГТилиндр 18 имеет пружину 22, поршень 23 и шток 24, соединенный с пневмоцилиндром 1. Держатель 21 имеет четыре зажима 25.
15
-
5
0
0 0 5
0 5
2
Автомат управления снабжен датчиком 26, соединенным молочным шлангом 15 с доильными стаканами 14 передних четвертей вымени. Автомат управления снабжен также дополнительным датчиком 27, который соединен шлангом 16 с доильными стаканами задних четвертей вымени. Датчики 26 и 27 соединены шлангами 28 и 29 с молокопроводом 30, причем на шлангах 29 установлен зажим 31. В корпусе датчиков 26 и 27 в установлены поплавки 32 с иглами 33 и клапй нами 34, Корпус каждого датчика имеет калиброванное отверстие 35, перегородку 36, молокоподводящий 37 и молоковыводящий 38 патрубки. С поплавком 32 датчика 26 связан шток 39, а с поплавком 32 датчика 27 соединен плунжер 40. Датчик 27 имеет камеру 41 постоянного вакуума. Патрубок 42 плунжера 40 связан с пульсатором 19 массажирующего устройства, а патрубок 43 соединен с пневмоцилиндром 1.
Камера 41 постоянного вакуума сообщена шлангом 44 с вакуумпроводом 45, к которому подсоединен пульсатор 46 доильного аппарата. Пульсатор связан посредством шланга 47 с распределителем 12 и с межстенными камерами доильных стаканов 14. В верхней- части корпуса датчиков установлена скоба 48 .-
На .конце штока 3 пневмоцилиндра 1 выполнен паз 49, а в пластине 9 выполнены вырезы 50. Держатель доильных стаканов 14 имеет пазы 31. В клапанах 34 поплавков 32 выполнены ка- налы 52.
Плунжер 40 датчика 27 снабжен каналом 53, который соединен с патрубком 42, а также каналом 54, соединенным с патрубком 43. Перегородка 36 делит .корпус каждого датчика 26 и 27 на камеры 55 и 56..
Манипулятор работает следующим образом.
После подготовки вымени к доению (обмывание, сдаивание первых струти молокоотдачи в автоматическом режиме. Нахождение поплавка 32 в верхнем положении обеспечивает выход кла пана 34 из перегородки 36, в результате в камерах 55 датчиков 26 и 27 создается нормальный вакуум, который и подается в подсосковые камеры доил ных стаканов 14. Молоко из датчиков
ек молока) оператор устанавливает поп-ю 26 и 27 вьшодится через патрубки 38
лавки 32 с помощью скоб 48 в стартовое положение (фиг.4). Затем подводит доильные стаканы 14 под вымя животного, одновременно переводя их в верхв молокопровод 30. Одновременно вакуум из камеры 41 постоянного вакуум датчика 27 через патрубок 42 подводится к пульсатору 19, а от него пе- ременньй вакуум - в цилиндр 18. Част та пульсаций пульсатора 19 настроена на частоту механических воздействий теленком на вымя при его сосании коровы. При подаче вакуума в цилиндр 18 поршень
25
35
нее положение и надевая на соски.При- 15 чем стаканы 14 связанные с датчиком 26, надеваются на передние соски, а стаканы, связанные с датчиком 27, на задние. Затем оператор открывает зажим 31 и вакуум из молокопровода 30,2о его через датчики 26 и 27, шланги 15 и 16 и молочные трубки 11 подается в подсосковые камеры доильных стаканов 14. Переменный вакуум от тора 46 через шланг 47, распределитель 12 и воздушные трубки 13 подается в межстенные камеры доильных стаканов 14. Доение началось. При стартовом положении поплавков 32 камеры 55 и 56 соединены посредством каналов 52 зо клапана 34, что обеспечивает в камере 55, а следовательно, и в подсосковых камерах доильных стаканов 14 вакуум пониженной величины. Это удовлетворяет требованиям физиологии, так как интенсивность молокоотдачи в начале доения незначительна. Кроме того, стартовое положение поплавка 32 датчика 27 обеспечивает соединение патрубка 43 с атмосферой и изоляцию пат- Q рубка 42 от камеры 41 постоянного вакуума. Следовательно, в пневмоцилинд- ре t будет атмосферное давление,а к цилиндру 18 массажирующего устройства от пульсатора 19 сигналов подаваться не будет. Молоко, поступающее в датчики 26 и 27 в начале доения, выводится в молокопровод 30 через калиброванное отверстие 35 и молочные шланги 28. С увеличением интенсивности молокоотдачи молоко не успевает эвакуироваться через калиброванные отверстия 35 датчиков 26 и 27 и их камеры 56 заполняются молоком, что обеспечивает подъем поплавков 32 в верхнее положение. Скобы 48 опускаются и датчики 26 и 27 начинают контролировать процесс доения передних и зад45
50
55
в молокопровод 30. Одновременно ва куум из камеры 41 постоянного ваку датчика 27 через патрубок 42 подво дится к пульсатору 19, а от него п ременньй вакуум - в цилиндр 18. Ча та пульсаций пульсатора 19 настрое на частоту механических воздействи теленком на вымя при его сосании к ровы. При подаче вакуума в цилиндр поршень
23 втягивается, обеспе чивая сжатие пружины 22, и втягива шток 24. На доильные стаканы 14 ne дается дополнительное усилие, обес печивающее их оттягивание на соска животного. При поступлении в цилин 18 атмосферного воздуха пружина 22 возвращает систему в исходное поло жение, в результате через пружину и держатель 21 на стаканы 14 мягко передается толкающее усилие, напра ленное вверх. Этим имитируется про цесс сосания коровы теленком. Это обеспечивает эффективный массаж в цессе доения не только сосков, но и вымени в целом, исключает наполз ние стаканов на соски, что обеспечи ет полноту вьщаивания- и исключает машинный додой. При снижении молок отдачи уровень молока в датчиках 2 и 27 начинает уменьшаться. В связи с меньшей развитостью передних четвертей вымени уровень молока вначал снижается в датчике 26. При опускании поплавка 32 его клапан 34 входи в перегородку 36 и обеспечивает сое нение камеры 55 с камерой 56 только посредством каналов 52 клапана 34. Это приводит и снижению вакуума в подсосковых камерах доильных стаканов 14 в конце доения. Вывод молока из датчика при этом осуществляется только через калиброванное отверсти 35. Дальнейшее снижение интенсивнос молокоотдачи обеспечивает опускание поплавка 32 в крайнее положение, в зультате. клапан 34 разъединяет каме ры 55 и 56 и подача вакуума в подсо -ковые камеры доильных стаканов 14
них четвертей вымени по интенсивное- прекращается. Доильные стаканы 14,
ти молокоотдачи в автоматическом режиме. Нахождение поплавка 32 в верхнем положении обеспечивает выход клапана 34 из перегородки 36, в результате в камерах 55 датчиков 26 и 27 создается нормальный вакуум, который и подается в подсосковые камеры доильных стаканов 14. Молоко из датчиков
5
5
15 о его оQ 5
0
5
в молокопровод 30. Одновременно вакуум из камеры 41 постоянного вакуума датчика 27 через патрубок 42 подводится к пульсатору 19, а от него пе- ременньй вакуум - в цилиндр 18. Частота пульсаций пульсатора 19 настроена на частоту механических воздействий теленком на вымя при его сосании коровы. При подаче вакуума в цилиндр 18 поршень
23 втягивается, обеспечивая сжатие пружины 22, и втягивает шток 24. На доильные стаканы 14 neper дается дополнительное усилие, обеспечивающее их оттягивание на сосках животного. При поступлении в цилиндр 18 атмосферного воздуха пружина 22 возвращает систему в исходное положение, в результате через пружину 20 и держатель 21 на стаканы 14 мягко передается толкающее усилие, направленное вверх. Этим имитируется процесс сосания коровы теленком. Это обеспечивает эффективный массаж в процессе доения не только сосков, но и вымени в целом, исключает наполза- ние стаканов на соски, что обеспечивает полноту вьщаивания- и исключает машинный додой. При снижении молоко- отдачи уровень молока в датчиках 26 и 27 начинает уменьшаться. В связи с меньшей развитостью передних четвертей вымени уровень молока вначале снижается в датчике 26. При опускании поплавка 32 его клапан 34 входит в перегородку 36 и обеспечивает соединение камеры 55 с камерой 56 только посредством каналов 52 клапана 34. Это приводит и снижению вакуума в подсосковых камерах доильных стаканов 14 в конце доения. Вывод молока из датчика при этом осуществляется только через калиброванное отверстие 35. Дальнейшее снижение интенсивности молокоотдачи обеспечивает опускание поплавка 32 в крайнее положение, в зультате. клапан 34 разъединяет камег ры 55 и 56 и подача вакуума в подсос- -ковые камеры доильных стаканов 14
подсоединенные к передним четвертям вымени животного, отключаются. Однако они удерживаются на сосках за счет-взаимной связи стаканов посредством держателя 21 и зажимов 25. При уменьшении интенсивности молокоотдачи из задних четвертей вымени доильные стаканы 14, подключенные к ним, также переводятся в режим работы при пониженном вакууме аналогично, как описано для передних стаканов. При дальнейшем снижении уровня молока в датчике 27 поплавок 32 выводит канал 53 плунжера 40 из камеры 41 по стоянного вакуума, поэтому пульсатор 19 отключается и массаж вымени прекращается. Как только поплавок 32 займет нижнее положение, клапан 34 разъединит камеры 55 и 56 и подача вакуума в подсосковые камеры задних доильных стаканов 14 прекратится. Одновременно канал 54 плунжера 40 войдет в камеру 41 постоянного вакуума, и вакуум через патрубок 43 начнет поступать в пневмоцилиндр 1. Поршень 2 начнет перемещаться, увлекая за собой шток 3. Доильные стаканы 14 снимаются с сое-. ков и вьшодятся из-под вымени. Как только хвостовик 4 штока 3 войдет вовнутрь передней стенки пневмоци- лйндра 1, цилиндрическая часть штока 3 не обеспечит фиксацию доильных стаканов 14 в верхнем положении и они повернутся вниз. Такое,положение доильных стаканов 14 исключает загрязнение их подсосковых камер при входе коровы в доильный станок и вькоде из него, а также при санитарной обработке вымени перед началом доецкя. Оператор закрывает зажим 31 и устанавливает поалавки 32 в стартовое положение . Манипулятор готов для вьщаивания следующего животного. Насацию доильных стаканов 14 на сосках животного и позволяют менять взаиморасположение стаканов и их координаты в пространстве, в зависимости от животного и морфологических особенностей его вымени.Кроме того, сочетание этих элементов позволяет оператору надевать на соски четыре стака10 на одновременно. Паз 49, конус штока 3 и вырезы 50 на пластине 9 позволяют изменить угол расположения пневмоцилиндра 1 к осевой (продольной) линии туловища животного. Это
15 делает-манипулятор универсальным с точки зрения возможности применения на доильных установках различных модификаций.
20 Формула изобретения
25 связанный с хвостовиком штока, на . конце которого установлен держатель доильных стаканов передних и задних четвертей вымени и массажирующее устройство с пневмоцилиндром, о т л и30 чающийся тем, что, с целью по- вьшения эффективности доения и эксплуатационной надежности, автомат управления снабжен дополнительным датчиком с клапаном, в цилиндрической час22 ти которого выполнены калиброванные каналы, а пневмоцилиндр массажирующего устройства связан посредством пульсатора с дополнительным датчиком автомата управления, причем хвостовик
40 штока манипулятора имеет в поперечном сечении квадратную форму.
пневмоцилиндром 1, пружины 20, держа- 3. Манипулятор по п. 1, о т л и- теля 21., который имеет пазы 51, а чающийс я тем, что держатель до- также квадратная часть 4 (хвостовик) ильных стаканов снабжен демпфирую- штока 3 обеспечивают надежную фик- QQ щей пружиной.
сацию доильных стаканов 14 на сосках животного и позволяют менять взаиморасположение стаканов и их координаты в пространстве, в зависимости от животного и морфологических особенностей его вымени.Кроме того, сочетание этих элементов позволяет оператору надевать на соски четыре стакана одновременно. Паз 49, конус штока 3 и вырезы 50 на пластине 9 позволяют изменить угол расположения пневмоцилиндра 1 к осевой (продольной) линии туловища животного. Это
делает-манипулятор универсальным с точки зрения возможности применения на доильных установках различных модификаций.
Формула изобретения
связанный с хвостовиком штока, на . конце которого установлен держатель доильных стаканов передних и задних четвертей вымени и массажирующее устройство с пневмоцилиндром, о т л ичающийся тем, что, с целью по- вьшения эффективности доения и эксплуатационной надежности, автомат управления снабжен дополнительным датчиком с клапаном, в цилиндрической части которого выполнены калиброванные каналы, а пневмоцилиндр массажирующего устройства связан посредством пульсатора с дополнительным датчиком автомата управления, причем хвостовик
штока манипулятора имеет в поперечном сечении квадратную форму.
Фиг.З
2
Фиг. ff
| Манипулятор к доильному аппарату | 1985 |
|
SU1291086A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Мельников С.В | |||
| Технологическое оборудование животноводческих ферм и комплексов | |||
| Л.: Агропромиздат, 1985, с | |||
| Электрический быстродействующий затвор для аппарата, передающего изображения на расстояние | 1921 |
|
SU529A1 |
| Аппарат для нагревания окружающей его воды | 1920 |
|
SU257A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
