о
О1
П|&
М
Изобретение относится к спортивному инвертарю и может быть использовано в тренировочном пррцессе борцов дзвдоистов и самбистов при совершен- ствовании приемов передняя подножка подхват, подсечка, выведение из равновесия, а также в специальной физической подготовке других спортсменов.
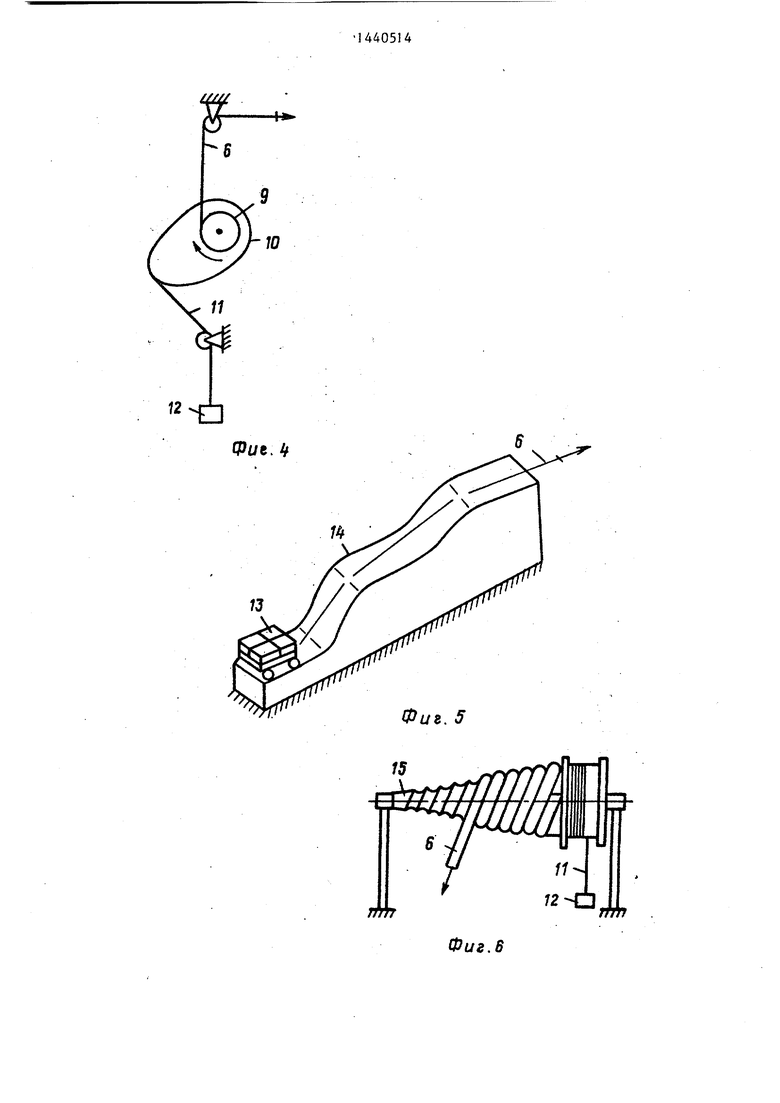
Целью изобретения является повышение эффективности тренировки. ; На фиг. 1 изображено устройство, общий вид; на фиг. 2 - то же, вид сверху; на фиг, 3 - соединение колец с криволинейной 1аправляющей, гибкими элементами и гибкой тягой; на фиг. 4.,, 5 и б - варианты выполнения средства для создания нагрузки; на фиг,7 конкретное выполнение приема.
На криволинейной направляющей 1 (фиг. 1 и 2), установленной на стойках 2, расположены с возможностью перемещения ведущее кольцо 3 и ведомые кольца 4, которые последовательно сое динены между собой гибкими элементами 5 (фиг. 3). Б отверстиях ведомых колец 4 располс(жена гибкая тяга 6 с возможностью перемещения параллель- но криволинейной направляющей, 1 Гибкая тяга .6-связывает средство 7 для создания нагрузки с ведущим кольцом 3, соединенным с кожаной петлей 8 для хвата рукой. Ведомое кольцо 4, дальнее по отнощегшю к ведущему кольцу 3, соединено с криволинейной направляющей 1 гибким элементом 5. Криволинейная направляющая 1 имеет пространственную форму, совпадающую с рациональной траекторией движения соответствующей руки спортсмена. Длины всех гибких элементов 5 одинако- вы, а их суммарная длина равна длине направляющей и соответственно рациональной траектории движения соответ- ствующей руки спортсйена при выполнении конкретного приема. Аналогично связаны между собой дополнительная криволинейная направляющая, кольца, гибкие элементы, гибкая тяга и блок программного управления.
Средство 7 для создания нагрузки выполнено изменяемым по величине противодействия в процессе выполняемо-. то движения. Оно может быть кулачко- вого типа.(фиг. 4) и содержит круглый ЕЖИВ 9 и овальный шкив 10 (кулачок) , на круглый шкив наматывается гибкая тяга б, а на овальный
шкив - шн5гр 11 с грузом 12. Програм ма изменения величины нагрузки в процессе вьшолнения приема задается конфигурацией овального шкива. Величина нагрузки является функцией угла поворота вала,
Элемент противодействия (фиг. 5) состоит из гибкой тяги-6, соединенно с грузовой тележкой 13, расположенно на наклонной направляющей 14с возможностью перемещения . Направляющая имеет переменный угол наклона. Программа изменения величины нагрузки задается конфигурацией наклонной направляющей.
Элемент противодействия (фиг. 6) содержит вал 15 с конусным и цилиндрическим участками. На конусном учаске выполнены спиральные углубления для размещения гибкой тяги 6. На цилиндрический участок наматывается . шнур 11 с грузом 12 на конце. Програма изменения величины нагрузки задается углом конусности и шагом спиральных углублений конусного участка вала 15.
Устройство работает .следующим образом.
Захватив рукой кожаную петлю 8, спортсмен выполняет прием (фиг. 7). При этом ведущее кольцо 3, соединенное с кожаной петлей 8, движется по криволинейной направляющей 1, которая задает рациональную траекто1)ию движения соответствующей руке спорт- .смена. Вместе с ведущим кольцом 3 движется и гибкая тяга б, связывающая ведущее кольцо 3 со средством 7 для создания нагрузки. По мере продзвижения ведущего кольца.3 по кри- . волинейной направляющей 1 соединенный с ним гибкий элемент 5 выпрямпяется и тянет соседнее ведомое кольцо 4 (фиг, 3), Постепенно все ведо-; мые кольца 4 приходят в движение. При этом гибкая тяга 6 принимает про- странственнута форму, соответствунщую криволинейной направляющей 1 и чем больше в устройстве ведомых колец 4, тем больше это соответствие. Следовательно, в любой точке траектории движения вектор направления перемещения руки спортсмена и вектор силы, противодействующей этому перемещению, лежат на одной прямой, А это способствует развитию именно той группы мышц, которая участвует в данной движении. По окончании выполнения приема средство 7 для создания нагрузки возвращает ведущее кольцо 3 и ведомые кольца исходное положение. Аналогично работает и вторая половина устройства,
Таким образом, по сравнению с прототипом предлагаемое устройство позволяет сосредотачивать нагрузку
на стоиках криволинейную направляющую с ползуном, несущим петлю для руки и связанным со средством для создания нагрузки, отличающееся тем, что, с целью повышения эффективности тренировки, ползун выполнен в виде пакета связанных последовательно между собой гибкими элементами ко

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для тренировки пловцов | 1986 |
|
SU1319880A1 |
| Устройство для тренировки борцов | 1984 |
|
SU1217436A1 |
| Спортивный тренажер | 2016 |
|
RU2615946C1 |
| Устройство для тренировки спортсменов | 1988 |
|
SU1523152A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ СПОРТСМЕНОВ | 2004 |
|
RU2252805C1 |
| Устройство для тренировки борцов | 1987 |
|
SU1414395A1 |
| Устройство для тренировки пловцов | 1988 |
|
SU1535554A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ СТОПЫ | 1991 |
|
RU2015706C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ ПЛОВЦОВ | 2011 |
|
RU2465941C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ТРЕНАЖЕР | 2023 |
|
RU2825045C1 |


Изобретение позволяет повысить эффективность тренировки путем обеспечения развития конкретных мышц на заданных отрезках выполняемого движеШ1Я. Устройство содержит одну или две криволинейные направляющие. На направляющей установлен ползун. Он вьшолнен в виде набора колец. Ведущее кольцо несет петлю для руки, а последнее из ведомых колец связано с направляняцей гибким элементом. Все кольца связаны между собой гибкими элементами. Длина всех гибких элементов одинакова. Ведущее кольцо связано посредством пропущенной через отверстия колец гибкой тяги со средством для создания нагрузки. Последнее выполнено изменяемым по величи7 не противодействия в процессе выполняемого движения. 1 з.п. ф-лы, 7 ил с (О
на мышцы рук спортсмена по любому за- юлец, петля для руки закреплена на веданному направлению, применяя длядущем кольце, а последнее из ведомых этой цели не только плоские, но иколец связано со стойкой гибким эле- пространственные криволинейные на-ментом равной длины остальным, при правляющие 1, различные по конфигура-этом средство для создания нагрузки ции для правой-и левой рук. Кроме то- 15выполнено .изменяемым по величине прого, предлагаемое устройство имеет меньшие габариты, проще по конструкции и более технологично в изготовлении.
Формула изобретения
тиводействия в процессе выполняемо- г,о движения и связано с ведущем кольцом пропущенной через отверстия колец гибкой тягой.
У
fpuai
Фаг2
.Ъ
5
t2
Фие.
/4
73
Фиг. 5
Фиг. 6
9us.l
| Устройство для тренировки борцов | 1984 |
|
SU1217436A1 |
