Изобретение относится к метрологическому обеспечению геофизических исследований скважин и может быть использовано на предприятиях, выпускающих скважинную аппаратуру, в метрологической службе производственных организаций, в научно-исследовательс ких и проектно-конструкторских организациях для выполнения технологических процессов настройки инклинометров, в частности регулировки чувствительных элементов и балансировки подвижных частей по отношению к опорным базисам, а также для выполнения комплекса экспериментальных исследований новых типов инклинометров и их стендовых испытаний.
Цель изобретения - повышение точности настройки и ускорение процесса исследований инклинометров.
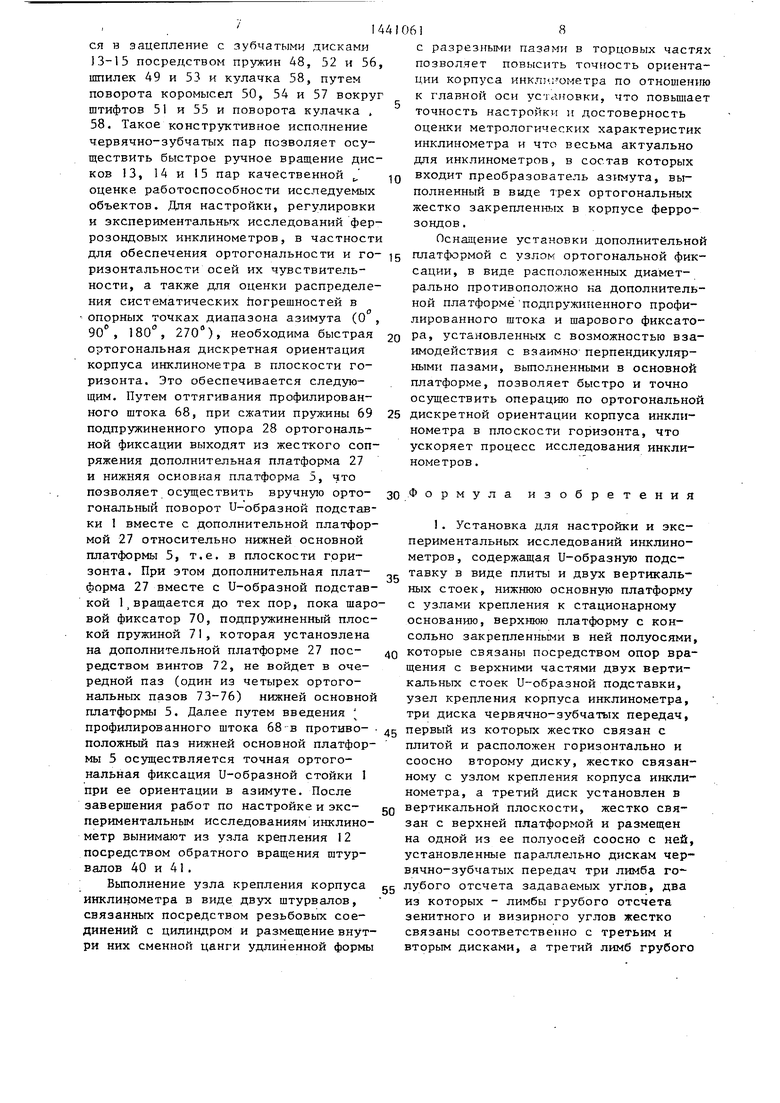
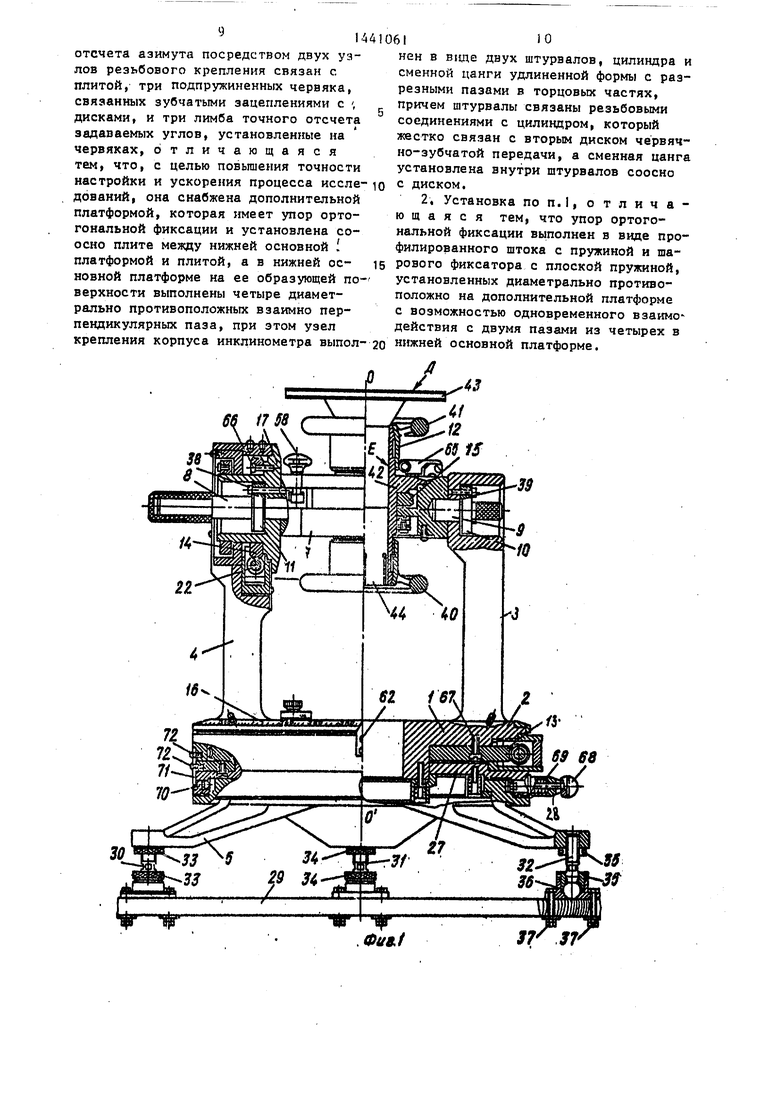
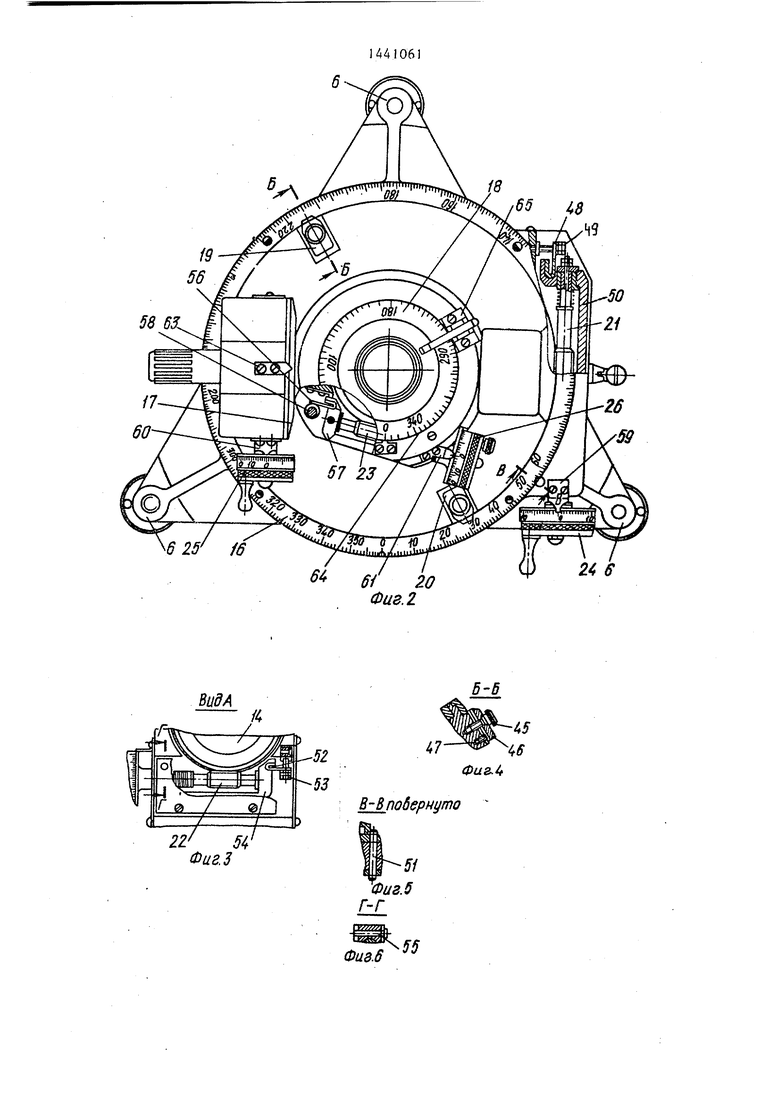
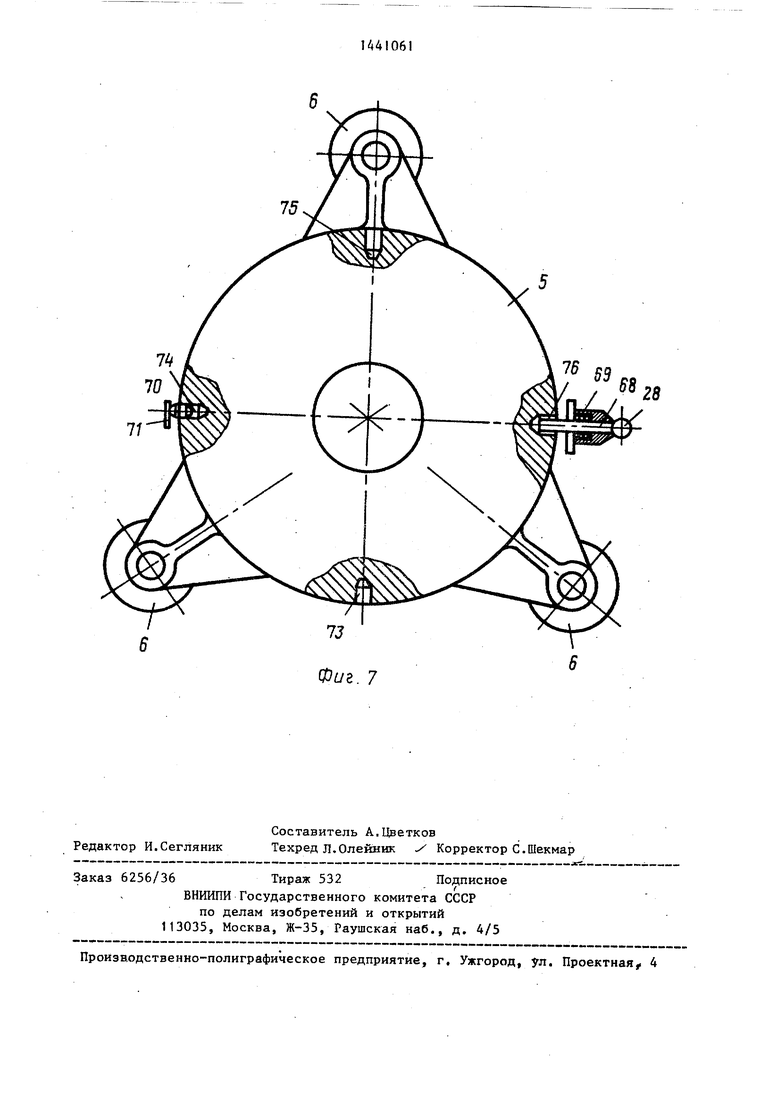
На фиг.1 приведена установка для настройки и экспериментальных исследований инклинометров, общий вид; на фиг.2 - то же, вид сверху; на фиг.З вид А на фиг.1; на фиг.4 - разрез Б-Б на фиг.2; на фиг.З - разрез В-В на фиг. 2; на фиг.6 - РазрезТ-Г на фиг.3; на фиг.7 - расположение взаимно перпендикулярных пазов на нижней основ- ной платформе установки, подпружиненного упора и шарового фиксатора.
Установка содержит U-образную подставку 1 в виде плиты 2 и двух вертикальных стоек 3 и 4, нижнюю основную платформу 5 с узлами 6 крепления к стационарному основанию, верхнюю г платформу 7 с консольно закрепленными в ней полуосями 8 и 9, опоры 10 и 11 вращения, узел 12 крепления корпуса инклинометра, три диска 13-15 червяч- но-зубчатых передач, лимбы 16-18 с делениями грубого отсчета задаваемых углов, два узла 19 и 20 резьбового крепления, три подпружиненных червя- ка 21-23, лимбы 24-26 точного отсчета задаваемых углов, дополнительную платформу 27, подпружиненный упор 28 ортогональной фиксации, стационарное основание 29, шпильки 30-32 со сфери- ческими торцами, контргайки 33-35, профилированные шайбы 36, винты 37- 39, два штурвала 40 и 41, цилиндр 42 технологическую платформу 43, сменную ц ангу 44 удлиненной формы с разрезными пазами в торцовых частях, винт 45 накидную планку 46, стопорный винт 47, плоскую пружину 48, шпильку 49 с ...контргайками, коромьюло 50, штифт 51
Q j
0
5 о
,
5
5
плоскую пружину 52, шпильку 53 с контргайками , коромысло 34, штифт 55, плоскую пружину 56, коромысло 57, кулачок 58, треугольные индексы 59- 64, откидной фиксирующий упор 65, винты 66 и 67, профилированный щток 68, пружину 69, .шаровой фиксатор 70, плоскую пружину 71, винты 72 и четыре взаимно ортогональных паза 73-76 нижней основной платформы 5.
Полуоси 8 и 9 связаны посред ством опор 10 и 11 вращения с верхними ияг- тями двух вертикальных стоек 3 и 4 U-образной подставки I. Первьш диск 13 червячно-зубчатой передачи жестко связан с плитой 2 и расположен горизонтально и соосно второму диску 15, жестко связанному с узлом 12 крепления корпуса инклинометра, а третий диск 14 установлен в вертшсальной плоскости, жестко связан с верхней платформой 7 и размещен на одной из ее полуосей В соосио с ней. Три лимба 16-18 с делениями грубого отсчета задаваемых углов установлены параллельно дискам 13-15 червячно-зубчатых передач. Два из них - лимбы 17 и 18 грубого отсчета зенитного и визирного углов жестко связаны соответственно с третьим диском 14 и вторым диском 15j а третий лимб 16 грубого отсчета азимута выполнен в виде кольца и по средством двух узлов 19 и 20 резьбового крепления связан с плитой 2.
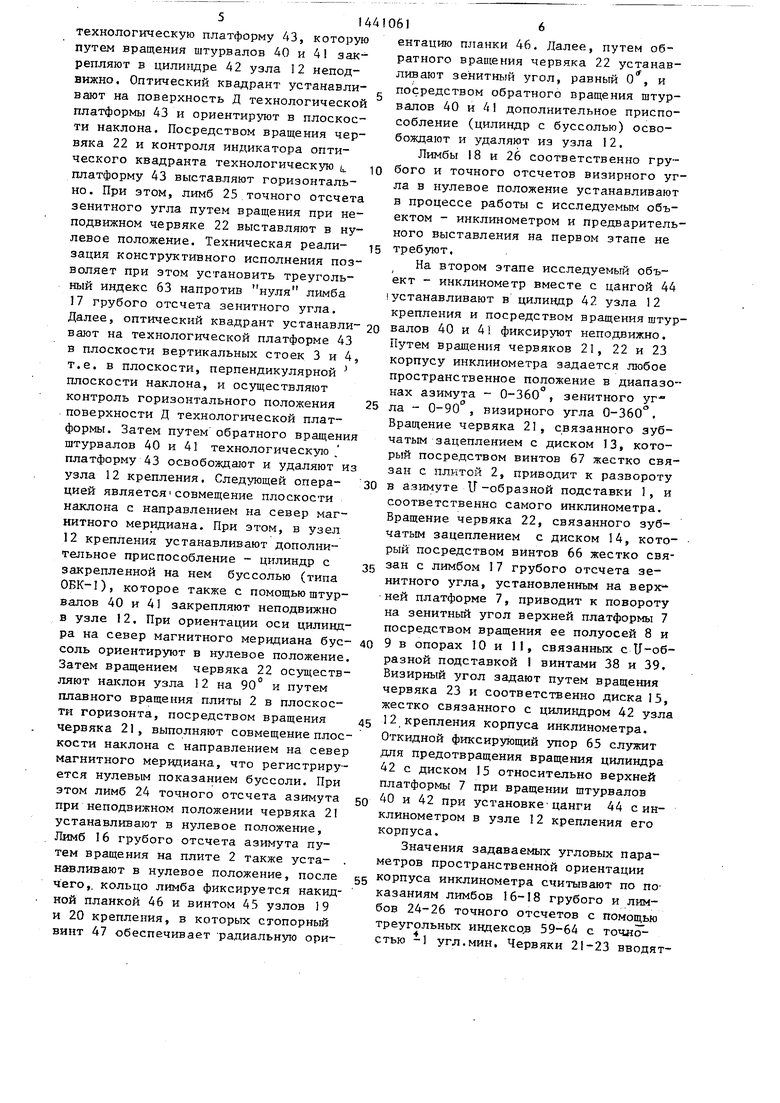
Три подпружиненных червяка 21-23 связаны зубчатыми зацеплениями соответственно с дисками 13-15. Три лимба 24-26 точного отсчета задаваемых углов установлены соответственно на. червяках 21-23. Дополнительная плат-: форма 27 .имеет упор 28 ортогональной фиксации и установлена соосно плите 2 между нижней основной платформой 5 и плитой 2. В нижней основной платформе 5 (фиг.З) на ее образующей поверхности выполнены четыре диаметрально противоположных взаимно перпендикулярных паза 73-76. Узлы 6 крепления нижней основн ой платформы 5 к стационарному основанию 29 выполнены в виде шпилек 30-32 со сферическими торцами, связанных резьбовыми соединениями с отверстиями в нижней основной платформе 5, и контргаек 33, 34 и 35. Сферические торцы шпилек меха нически связаны с профилированными шайбами 36, которьье посредством винтов 37 жестко связаны с основанием
29. Опоры 10 и 11 вращения полуосей 8 и 9 связаны с вертикальными стойками 3 и 4 посредством винтов 38 и 39. Узел 12 крепления корпуса инклинометра вьшолнен в виде двух штурвалов 40- 41, цилиндра 42 и сменной цанги 44 удлиненной формы с разрезными пазами в торцовых частях. Штурвалы 40 и 41
641 связанными соответственно с дополнительной платформой 27, вертикальной стойкой 4 и верхней платформой 7, Узел 12 крепления корпуса инклинометра связан с верхней платформой 7 посредством откидного фиксирующего упора 65. Диск 14 связан с лим бом 17 грубого отсчета зенитного уг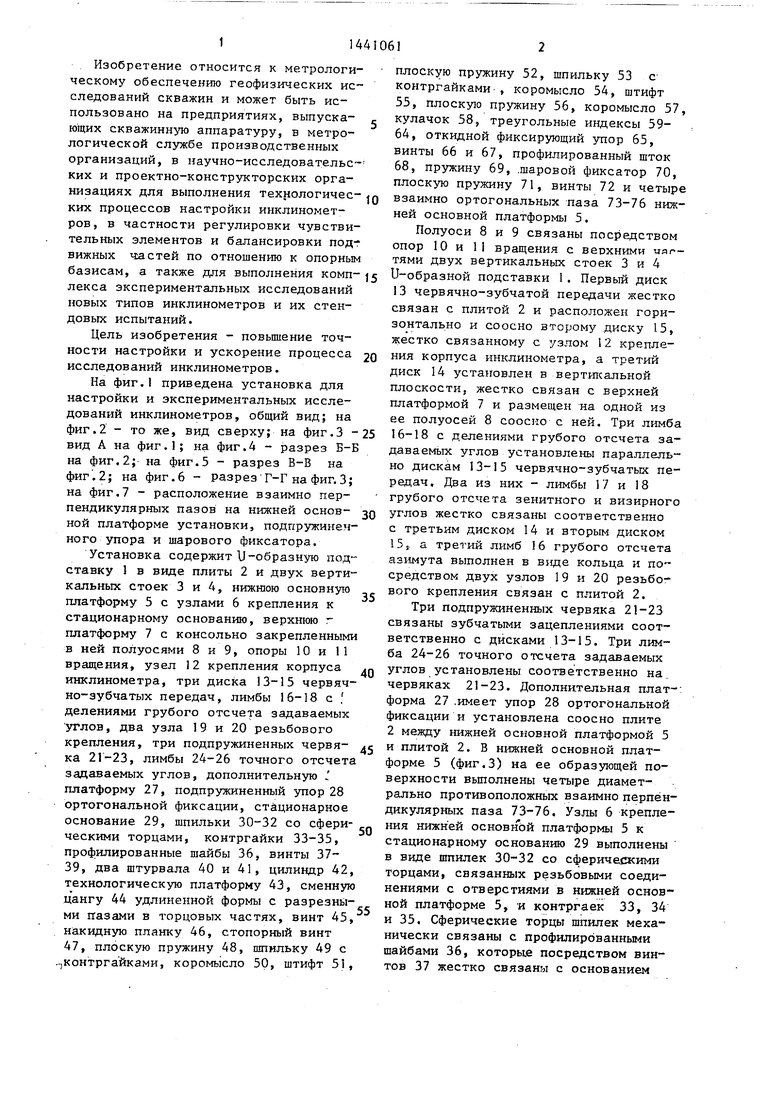
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ НАСТРОЙКИ И ЭКСПЕРИМЕНТАЛЬНЫХ ИССЛЕДОВАНИЙ ИНКЛИНОМЕТРОВ | 1999 |
|
RU2178522C2 |
| УСТАНОВКА ДЛЯ ГРАДУИРОВКИ И КАЛИБРОВКИ ИНКЛИНОМЕТРОВ | 2008 |
|
RU2364718C1 |
| СТЕНД КАЛИБРОВКИ ИНКЛИНОМЕТРОВ | 2023 |
|
RU2807632C1 |
| АВТОМАТИЗИРОВАННАЯ УСТАНОВКА ДЛЯ КАЛИБРОВКИ ИНКЛИНОМЕТРОВ | 2002 |
|
RU2249689C2 |
| КОМПЛЕКС ДЛЯ ПОВЕРКИ И КАЛИБРОВКИ СКВАЖИННЫХ ИНКЛИНОМЕТРОВ | 2010 |
|
RU2439493C1 |
| СПОСОБ КОНТРОЛЯ АЗИМУТАЛЬНОЙ НАПРАВЛЕННОСТИ СКВАЖИНЫ С ИСПОЛЬЗОВАНИЕМ GPS (ВАРИАНТЫ) И ПОВЕРОЧНАЯ ИНКЛИНОМЕТРИЧЕСКАЯ УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА КОНТРОЛЯ АЗИМУТАЛЬНОЙ НАПРАВЛЕННОСТИ СКВАЖИНЫ С ИСПОЛЬЗОВАНИЕМ GPS | 2010 |
|
RU2433262C1 |
| ТЕЛЕСКОП | 2002 |
|
RU2227925C2 |
| СТЕНД ТАРИРОВКИ ТЕЛЕСИСТЕМ | 2015 |
|
RU2617142C1 |
| Инклинометр | 1988 |
|
SU1569403A1 |
| Устройство для поверки пространственного положения скважинных приборов | 1976 |
|
SU705260A1 |
Изобретение относится к метрологическому обеспечению геофизических исследований скважин. Цель изобретения - повьппение точности настройки и ускорение процесса исследований. Для этого установка содержит две платформы (П) 5 первая II имеет упор ортогональной фиксации и установлена соос- но плите между второй П и плитой. На образующей поверхности первой П выполнены четыре диаметрально противоположных взаимно перпендикулярных па за. Установка имеет узел крепления корпуса инклинометра, выполненный в виде двух штурвалов (Ш), цилиндра и сменной цанги удлиненной формы с разрезными пазами в торцовых частях. Резьбовыми соединениями Ш связаны с цилиндром. Последний лсестко связан с диском червячно-зубчатой передачи. Цанга установлена внутри Ш соосно с диском 15. Упор выполнен в виде п1эо- филированного штока с пружиной и ша рового фиксатора с плоской пружиной, установленных на дополнительной П с возможностью воздействия одновременно с двумя пазами из четырех в первой П. Благодаря такому выполнению узла крепления повышаются точность и достоверность оценки метрологических характеристик инклинометра. Эта весьма актуально для инклинометров, у которых преобразователи выполнены в виде ортогональных феррозондов. Наличие дополнительной П позволяет быстро и точно ориентировать ортогонально . дискретно корпус инклинометра,в плоскости горизонта. 1 з.п,ф-лы, 7 ил. С (Л О Ф
; связаны резьбовыми соединениями с ци- ю - посредством винтов 66, а диск 13линдром 42, который жестко связан со вторым диском 15 червячно-зубчатой передачи. Внутри штурвалов 40 и 41 соосно с диском 5 ус тановлена смен44 или технологическая плат-15 с плоской пружиной 71, установленных
ная цанга форма 43.
Сменная цанга 44 предназначена для крепления корпуса инклинометра, а т технологическая платформа 43, плоская поверхность Д которой выполняется 20 строго перпендикулярно образующей по-( верхности Е цилиндра, зажимаемого посредством резьб штурвалов 40 и 41, предназначена для горизонтирования верхней платформы 7. Узлы 19 и 20 резьбового крепления кольца лимба 16 грубого отсчета азимута содержат (сечение Б-Б на фиг.2) винт 45, накидную планку 46 и стопорный винт 47. Червяк 21, входящий в зубчатое зацепление с диском 13 плиты 2, подпружинен плоской пружиной 48, которая механически связана посредством шпильки 49 с . контргайками с плитой 2 и коромыслом 50, поворачивающимся вокруг штифта 51 (сечение В-В на фиг.2). Червяк 22, входящий в зубчатое зацепление с диском 14 верхней платформы 7, подпружинен плоской пружиной 52, которая медиаметрально противоположно на дополнительной платформе 27 с возможностью одновременного взаимодействия с двумя пазами 73, 75 или 74, 76 иэ четырех в нижней основной платформе 5 при фиксированном положении относительно нее дополнительной платформы 27. Плоская пружина 71 шарового фиксатора 70 крепится к образующей по- 25 верхности плиты 2.
Предлагаемое устройство работает в два этапа.
Первый - этап точной пространст- 30 венной ориентации самой установки, т.е. совмещение ее базиса (правой прямоугольной системы координат) с опорным базисом, образованным вектором ускорения свободного падения и гори- 2g зонтальной составляющей полного вектора напряженности геомагнитного поля.
Второй - собственно фиксированная
вашщи мся вокруг штифта 55 (сечение Г-Г на фиг.2), Червяк 23, входящий в зубориентация объекта исследования (ин- ханически связана посредством шпильки 40 клинометра) на заданные азимут, за- . 53 с контргайками с вертикальной нитный и визирный углы. На первом стойкой 4 коромыслом 54, поворачи- этапе, заключающемся в подготовке установки к работе, шпильки 30-32 вместе с профилированными шайбами 36 початое зацепление с диском 15, подпру- 45 средством винтов 37 крепят к стацио- жинен плоской пружиной 56, механичес- нарному основанию 29. На плоскости ки связанной с коромыслом 57 и кулач- плиты 2 против одного из узлов 6 крепления к стационарному основанию устанавливают оптический квадрант КО-10
50
ком 58. Лимб 24 точного отсчета азимута снабжен треугольным индексом 59, жестко связанным с плитой 2. Лимб 25 точного отсчета зенитного угла снабжен треугольным индексом 60, жестко связанным с вертикальной стойкой 4. Лимб 26 точного отсчета визирного угла снабжен треугольным индексом 61, жестко связанным с верхней платформой 7, Лимбы 16, 17 и 18 грубого отсчета задаваемых углов также снабжены треугольными индексами 62, 63 и
(КО-30 и др.), выставленный в нулевое положение. Путем вращения U -образной подставки 1, установки оптического квадранта на плите 2 напротив каждого узла 6 и вращения шпилек 30, 31 и 55 32 осуществляют горизонтирование плиты 2, после чего положение шпилек 30| 31 и 32 фиксируют контргайками 33, 34 и 35. Затем в узел 12 крепления . корпуса инклинометра устанавливают
с плитой 2 посредством винтов 67. I Упор 28 ортогональной фиксации выполнен в виде профилированного,штока 68 с пружиной 69 и шарового фиксатора 70
диаметрально противоположно на дополнительной платформе 27 с возможностью одновременного взаимодействия с двумя пазами 73, 75 или 74, 76 иэ четырех в нижней основной платформе 5 при фиксированном положении относительно нее дополнительной платформы 27. Плоская пружина 71 шарового фиксатора 70 крепится к образующей по- верхности плиты 2.
Предлагаемое устройство работает в два этапа.
Первый - этап точной пространст- венной ориентации самой установки, т.е. совмещение ее базиса (правой прямоугольной системы координат) с опорным базисом, образованным вектором ускорения свободного падения и гори- зонтальной составляющей полного вектора напряженности геомагнитного поля.
Второй - собственно фиксированная
50
(КО-30 и др.), выставленный в нулевое положение. Путем вращения U -образной подставки 1, установки оптического квадранта на плите 2 напротив каждого узла 6 и вращения шпилек 30, 31 и 55 32 осуществляют горизонтирование плиты 2, после чего положение шпилек 30| 31 и 32 фиксируют контргайками 33, 34 и 35. Затем в узел 12 крепления . корпуса инклинометра устанавливают
технологическую платформу 43, которую путем вращения штурвалов 40 и 4 закрепляют в цилиндре 42 узла 12 неподвижно. Оптический квадрант устанавливают на поверхность Д технологической платформы 43 и ориентируют в плоскости наклона. Посредством вращения червяка 22 и контроля индикатора оптического квадранта технологическую t платформу 43 выставляют горизонтально. При этом, лимб 25 точного отсчета зенитного угла путем вращения при неподвижном червяке 22 выставляют в нулевое положение. Техническая реализация конструктивного исполнения позволяет при этом установить треугольный индекс 63 напротив нуля лимба 17 грубого отсчета зенитного угла.
Далее, оптический квадрант устанавли- 20 валов 40 и 41 фиксируют неподвижно, вают на технологической платформе 43 Путем вращения червяков 21, 22 и 23
и
в плоскости вертикальных стоек . « -т, т.е. в плоскости, перпендикулярной плоскости наклона, и осуществляют контроль горизонтального положения поверхности Д технологической платформы. Затем путем обратного вращения штурвалов 40 и 41 технологическую . платформу 43 освобождают и удаляют из узла 12 крепления. Следующей операцией является совмещение плоскости наклона с направлением на север магнитного меридиана. При этом, в узел 12 крепления устанавливают дополнительное приспособление - цилиндр с закрепленной на нем буссолью (типа ОБК-1), которое также с помощью штурвалов 40 и 41 закрепляют неподвижно в узле 12. При ориентации оси цилиндра на север магнитного меридиана буссоль ориентируют в нулевое положение. Затем вращением червяка 22 осуществляют ншслон узла 12 на 90 и путем плавного вращения плиты 2 в плоскости горизонта, посредством вращения червяка 21, выполняют совмещение плоскости наклона с направлением на север магнитного меридиана, что регистрируется нулевым показанием буссоли. При этом лимб 24 точного отсчета азимута при неподвижном положении червяка 2 устанавливают в нулевое положение. Лимб 16 грубого отсчета азимута путем вращения на плите 2 также уста- . навливают в нулевое положение, после чего,, кольцо лимба фиксируется накидной планкой 46 и винтом 45 узлов 19 и 20 крепления, в которых стопорный винт 47 обеспечивает радиальную ори25
корпусу инклинометра задается любое пространственное положение в диапазо нах азимута - 0-360°, зенитного угла - 0-90 J визирного угла 0-360 ,
Вращение червяка 21, связанного зубчатым зацеплением с диском 13, который посредством винтов 67 жестко свя зан с плитой 2, приводит к развороту
30 в азимуте 1Г-образной подставки 1, и соответственно самого инклинометра. Вращение червяка 22, связанного зубчатым зацеплением с диском 14, кото рый посредством винтов 66 жестко свя
35 зан с лимбом 17 грубого отсчета зенитного угла, установленным на верх ней платформе 7, приводит к повороту на зенитный угол верхней платформы 7 посредством вращения ее полуосей 8 и
40 9 в опорах 10 и II, связанных с U-об разной подставкой I винтами 38 и 39 Визирный угол задают путем вращения червяка 23 и соответственно диска 15 жестко связанного с циливдром 42 узл
45 12 крепления корпуса инклинометра. Откидной фиксирующий упор 63 служит для предотвращения вращения цилиндра 42 с диском 15 относительно верхней платформы 7 при вращении штурвалов
50 40 и 42 при установке-цанги 44 с ин клинометром в узле 12 крепления его корпуса.
Значения задаваемых угловых параметров пространственной ориентации
55 корпуса инклинометра считывают по по казаниям лимбов 16-18 грубого и лимбов 24-26 точного отсчетов с помощью треугольных индексо.в 59-64 с точнс - стью -1 угл.мин. Червяки 21-23 вводя
ентацию планки 46. Далее, путем обратного вращения червяка 22 устанавливают зенитный угол, равный О , и посредством обратного вращения штурвалов 40 и 4 дополнительное приспособление (цилиндр с буссолью) освобождают и удаляют из узла I2.
Лимбы 18 и 26 соответственно грубого и точного отсчетов визирного угла в нулевое положение устанавливают в процессе работы с исследуемым объектом - инклинометром и предварительного выставления на первом этапе не
требуют.
На втором этапе исследуемый объект - инклинометр вместе с цангой 44 I устанавливают в цилиндр 42 узла 12 крепления и посредством вращения штур
корпусу инклинометра задается любое пространственное положение в диапазонах азимута - 0-360°, зенитного угла - 0-90 J визирного угла 0-360 ,
Вращение червяка 21, связанного зубчатым зацеплением с диском 13, который посредством винтов 67 жестко связан с плитой 2, приводит к развороту
в азимуте 1Г-образной подставки 1, и соответственно самого инклинометра. Вращение червяка 22, связанного зубчатым зацеплением с диском 14, который посредством винтов 66 жестко связан с лимбом 17 грубого отсчета зенитного угла, установленным на верх ней платформе 7, приводит к повороту на зенитный угол верхней платформы 7 посредством вращения ее полуосей 8 и
9 в опорах 10 и II, связанных с U-об- разной подставкой I винтами 38 и 39. Визирный угол задают путем вращения червяка 23 и соответственно диска 15, жестко связанного с циливдром 42 узла
12 крепления корпуса инклинометра. Откидной фиксирующий упор 63 служит для предотвращения вращения цилиндра 42 с диском 15 относительно верхней платформы 7 при вращении штурвалов
40 и 42 при установке-цанги 44 с инклинометром в узле 12 крепления его корпуса.
Значения задаваемых угловых параметров пространственной ориентации
корпуса инклинометра считывают по по казаниям лимбов 16-18 грубого и лимбов 24-26 точного отсчетов с помощью треугольных индексо.в 59-64 с точнс - стью -1 угл.мин. Червяки 21-23 вводятСЯ в зацепление с зубчатыми дисками 13-15 посредством пружин 48, 52 и 56 шпилек 49 и 53 и кулачка 58, путем поворота коромысел 50, 54 и 57 вокру штифтов 51 и 55 и поворота кулачка . 58. Такое конструктивное исполнение червячно-зубчатых пар позволяет осуществить быстрое ручное вращение дисков 13, 14 и 15 пар качественной оценке работоспособности исследуемых объектов. Для настройки, регулировки и экспериментальньгх исследований фер- розондовых инклинометров, в частности для обеспечения ортогональности и го- ризонтальности осей их чувствительности, а также для оценки распределения систематических hoгpeшнocтeй в опорных точках диапазона азимута (О 90, 180°, 270°), необходима быстрая ортогональная дискретная ориентация корпуса инклинометра в плоскости горизонта. Это обеспечивается следующим. Путем оттягивания профилированного штока 68, при сжатии пружины 69 подпружиненного упора 28 ортогональной фиксации выходят из жесткого сопряжения дополнительная платформа 27 и нижняя основная платформа 5, что позволяет осуществить вручную орто- гональный поворот U-образной подставки 1 вместе с дополнительной платформой 27 относительно нижней основной платформы 5, т.е. в плоскости горизонта. При этом дополнительная плат- форма 27 вместе с U-образной подставкой 1,вращается до тех пор, пока шаровой фиксатор 70, подпружиненный плоской пружиной 71, которая установлена на дополнительной платформе 27 пос- редством винтов 72, не войдет в очередной паз (один из четырех ортогональных пазов 73-76) нижней основной платформы 5. Далее путем введения профилированного штока 68-в противо- положный паз нижней основной платформы 5 осуществляется точная ортогональная фиксация и-образной стойки 1 при ее ориентации в азимуте. После завершения работ по настройке и экс- периментальным исследованиям инклинометр вынимают из узла крепления I2 посредством обратного вращения штурвалов 40 и 4.
Выполнение узла крепления корпуса инклинометра в виде двух штурвалов, связанных посредством резьбовых соединений с цилиндром и размещение внутри них сменной цанги удлиненной формы
с разрезными пазами в торцовых частя позволяет повысить точность ориентации корпуса .ь ометра по отношени к главной оси установки, что повьшгае точность настройки ir достоверность оценки метрологических характеристик инклинометра и что весьма актуально для инклинометров, в состав которых входит преобразователь азимута, выполненный в виде трех ортогональных жестко закрепленных в корпусе феррозондов .
Пснап(ение установки дополнительной платформой с узлом ортогональной фиксации, в виде расположенных диаметрально противоположно на дополнительной платформе подпружиненного профилированного штока и шарового фиксатора, установленных с возможностью взаимодействия с взаимно- перпендикулярными пазами, выполненными в основной платформе, позволяет быстро и точно осуществить операцию по ортогональной дискретной ориентации корпуса инклинометра в плоскости горизонта, что ускоряет процесс исследования инклинометров.
Формула изобретения
I. Установка для настройки и экспериментальных исследований инклинометров , содержащая U-образную подставку в виде плиты и двзтс вертикальных стоек, нижнюю основную платформу с узлами крепления к стационарному основанию, верхнюю платформу с кон- сольно закрепленными в ней полуосями, которые связаны посредством опор вращения с верхними частями двух вертикальных стоек и-образной подставки, узел крепления корпуса инклинометра, три диска червячно-зубчатых передач, первый из которых жестко связан с плитой и расположен горизонтально и соосно второму диску, жестко связанному с узлом крепления корпуса итжли- нометра, а третий диск установлен в вертикальной плоскости, жестко связан с верхней платформой и размещен на одной из ее полуосей соосно с ней, установленные параллельно дискам червячно-зубчатых передач три лимба го лубого отсчета задаваемых углов, два из которых - лимбы грубого отсчета зенитного и визирного углов жестко связаны соответственно с третьим и вторым дисками, а третий лимб грубого
отсчета азимута посредством двух узлов резьбового крепления связан с плитой, три подпружиненных червяка, связанных зубчатыми зацеплениями с , дисками, и три лимба точного отсчета задаваемых углов, установленные на червяках, отличающаяся тем, что, с целью повышения точности
настройки и ускорения процесса иссле- ю с диском.
дований, она снабжена дополнительной платформой, которая имеет упор ортогональной фиксации и установлена соосно плите между нижней основной платформой и плитой, а в нижней основной платформе на ее образующей поверхности выполнены четыре диаметрально противоположных взаимно перпендикулярных паза, при этом узел
крепления корпуса инклинометра выпол- 20 нижней основной платформе.
иен в виде двух штурвалов, цилиндра и сменной цанги удлиненной формы с разрезными пазами в торцовых частях, причем штурвалы связаны резьбовыми соединениями с цилиндром, который зкестко связан с вторым диском чёрвяч- но-зубчатой передачи, а сменная цанга установлена внутри штурвалов соосно
2, Установка по п.1, отличающая с я тем, что упор ортогональной фиксации выполнен в виде профилированного штока с пружиной и ша- рового фиксатора с плоской пружиной, установленных диаметрально противоположно на дополнительной платформе с возможностью одновременного взаимо- действия с двумя пазами из четырех в
43
3$
Фи9,1
J7 37
56 6.
io
UuiluuWuuu
6i 20 Фиг. 2
BudA
Фиг.З
Фи8.6
24 ff
6-6
B-Bno6epnijmo
-51
.5 Г-Г
55
Фиг. 7
| Установка для контроля скважиннных приборов | 1978 |
|
SU791957A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| Техническое описание и инструкция по эксплуатации. | |||
