Изобретение относится к области промысловой геофизики, а именно к способам и устройствам для определения пространственной ориентации скважин.
Уровень техники.
В современных условиях в промысловой геофизике одним из требований заказчика является наиболее точное определение ориентации скважины. Эта информация необходима для определения вертикальной глубины скважины, для обсаживания, для установки отклонителя и прочих операций. При этом в настоящее время все чаще требуется информация, измеренная с максимальной дискретностью до 5 см за достаточно короткий период задалживания скважины. Требуемую дискретность может обеспечить только непрерывный режим съема параметров ориентации скважины в режиме гироазимута посредством измерительного модуля инклинометра.
В геофизике широко применяются инклинометры, отслеживающие пространственную ориентацию скважины. Однако известные приборы отличаются либо избыточным количеством чувствительных элементов (Е21В 47/02, №2078204, 1997), либо сложностью конструкции (Е21В 47/02, №2100594, 1997), либо сложным алгоритмом управления режимами работы (Е21Б 47/022, №2269001, 2006). Кроме того, в силу конструктивных и эксплуатационных ограничений гироскопов, применяемых в скважинных инклинометрах, основную сложность вызывает задача начальной выставки гироскопа.
Прогресс в области высокоточной спутниковой навигации GPS позволяет значительно упростить эту задачу. Поскольку высокая точность выставки гироскопа нужна только в начальный момент (во время выставки азимута), азимутальную выставку может обеспечить внешний курсоуказатель. В скважинном инклинометре в этом случае могут использоваться менее чувствительные гироскопы. Дальнейшее хранение выставленного угла в гироазимутальном режиме может быть реализовано уже на грубых гироскопах, что упрощает конструкцию инклинометра.
Предварительная калибровка и выставка инклинометров производится, как правило, на поверочных инклинометрических установках, обеспечивающих настройку и проверку датчиков зенитного угла, визирного угла и датчиков азимута. Поверочные инклинометрические установки отличаются друг от друга габаритными размерами, узлами и/или способами крепления поверяемого прибора на поворотном столе, узлами выставки и узлами контроля задаваемых углов ориентации (РФ, заявка №2002111523, Е21В 47/00, 2003 г.; патент РФ №2186966, Е21В 47/02, G01C 9/00, 2002 г.; патент РФ №2364718, Е21В 47/02, G01C 9/00).
Известна установка азимутальной выставки инклинометров (Перовский B.C., Биндер Я.И. Азимутальная выставка инклинометров для скважин произвольной ориентации с использованием GPS-компаса. Научно-технический вестник С-Петербургского университета информации, технологий, механики и оптики. 2008, №57, с.41-46.), в которой в качестве внешнего курсоуказателя применяется GPS-компас. Установка содержит базовое основание, к которому крепятся антенны GPS-компаса и подземный прибор. Фазовые центры антенн разнесены друг от друга по прямой, параллельной продольной оси подземного прибора (инклинометра). Антенны с помощью резьбового соединения крепятся к специальным привалочным плоскостям в виде монолитных стальных параллелепипедов, приваренных к базовому основанию.
С помощью известной установки осуществляется высокоточная начальная выставка гироскопов подземного прибора. В целом это позволяет несколько упростить конструкцию последнего и значительно повысить точность измерений и их дискретность, а также сократить время проведения исследований.
При этом настройка и поверка параметров остальных датчиков подземного прибора осуществляется на другой поверочной инклинометрической установке.
Задачей настоящего изобретения является повышение точности определения азимутальной направленности скважины, обеспечение контроля достоверности работы такого инклинометра в исследуемой скважине, а также расширение функциональных возможностей поверочной инклинометрической установки.
Поставленная задача решается следующим образом.
В зависимости от поставленной задачи исследований контроль азимутальной направленности скважины осуществляют по первому либо по второму варианту предложенного способа.
По первому варианту - по способу контроля азимутальной направленности скважины с использованием GPS, включающему операции предварительной выставки гироскопа инклинометра и проведения измерений в скважине с преобразованием и обработкой получаемой информации наземной аппаратурой, согласно изобретению
- осуществляют предварительную выставку гироскопа инклинометра посредством системы спутниковой навигации GPS путем выставки базового значения азимутального угла,
- фиксируют базовое значение азимутального угла ЗУ наземной аппаратуры,
- в процессе движения инклинометра по скважине, непрерывно измеряемые значения азимутального угла определяют через приращения азимутального угла Δα, вычисляемого путем дискретного интегрирования угловой скорости перемещения инклинометра, к базовому значению азимутального угла,
- определяют магнитный азимут и географический азимут траектории скважины и определяют величину магнитного склонения скважины.
- сравнивая определенное магнитное склонение по всей длине скважины сравнения с известной величиной магнитного склонения данной местности, оценивают достоверность измеренных величин азимута.
По второму варианту - по способу контроля азимутальной направленности скважины с использованием GPS, включающему операции предварительной выставки гироскопа инклинометра и проведение измерений в скважине с преобразованием и обработкой получаемой информации наземной аппаратурой, согласно изобретению
- осуществляют предварительную проверку точности показаний азимута скважинного инклинометра посредством системы спутниковой навигации GPS,
- в процессе точечного промера в каждой заданной точке ствола скважины инклинометром измеряют географическое и магнитное значение азимутального угла,
- определяют магнитное склонение исследуемого ствола скважины, сравнивают с известной величиной магнитного склонения данной местности и оценивают достоверность измерения величин азимута данным инклинометром.
Для реализации способа контроля азимутальной направленности скважины с использованием GPS применяется поверочная инклинометрическая установка, которая содержит основание с регулировочными винтами; поворотный стол с узлами фиксации инклинометра, установленный на вертикальной оси основания с возможностью вращения в горизонтальной плоскости; систему дисков и лимбов с червячными передачами и/или электроприводами для выставки задаваемых/проверяемых углов датчиков инклинометра и дополнительно снабжена системой спутниковой навигации GPS в виде блока приема сигналов спутниковой навигации GPS, состоящего из интерфейсного блока и приемника сигналов и как минимум двух антенн. При этом антенны установлены на поворотном столе и разнесены относительно друг друга по базовой линии, параллельной оси поверяемого инклинометра, либо совпадающей с ней, а продольные оси антенн параллельны базовой линии.
Предложенные варианты способа контроля азимутальной направленности скважины и поверочная инклинометрическая установка для их реализации имеют следующие преимущества и существенные отличия по сравнению с известными:
интегрированные система спутниковой навигации GPS и инклинометр позволяют:
- определить координаты исследуемой скважины в трех измерениях в географической системе координат, что значительно увеличивает производительность измерений при получении координат точек, в том числе и малодоступных;
- определить точное местоположения скважинного прибора в скважине по глубине, его ориентацию, скорость перемещения по скважине,
- за одну спуско-подъемную операцию инклинометра по скважине отследить значения одновременно двух величин - магнитного и географического азимута, обеспечивая тем самым двойной контроль искомого параметра, повышая тем самым достоверность исследований и сокращение затрат на их проведение;
- в несколько раз увеличить дискретность и скорость сбора данных в процессе непрерывного исследования скважины,
- обеспечить оператору возможность в реальном режиме времени оценивать ситуацию, принимать решение по корректировке, изменению направления движения скважинного прибора или его остановке;
- обеспечить возможность оценки статистической и динамической информации о системе наблюдений (сравнение вычисленного магнитного склонения с магнитным склонением на устье скважины, полученным от геофизических служб) и уменьшить вероятность ошибки в оценке достоверности значения азимута, измеренного инклинометром.
Оснащение поверочной инклинометрической установки системой спутниковой навигации GPS в виде блока приема сигналов спутниковой навигации GPS с антеннами
- упрощает конструкцию инклинометрической установки, поскольку исключает наличие буссолей в узле, задающем угол азимута скважинного прибора,
- повышает точность настройки и поверки скважинного прибора, поскольку снижает влияние человеческого фактора при выставке задаваемых углов,
- расширяет функциональные возможности инклинометрической установки, поскольку, кроме поверки и настройки инклинометров, обеспечивает также возможность внешней выставки азимутальной ориентации гироскопов, может использоваться в качестве GPS-компаса при использовании инклинометра в режиме интегрирования угловой скорости в процессе непрерывного перемещения по скважине, а также обеспечивает контроль заданных значений азимута при точечном промере скважины инклинометром.
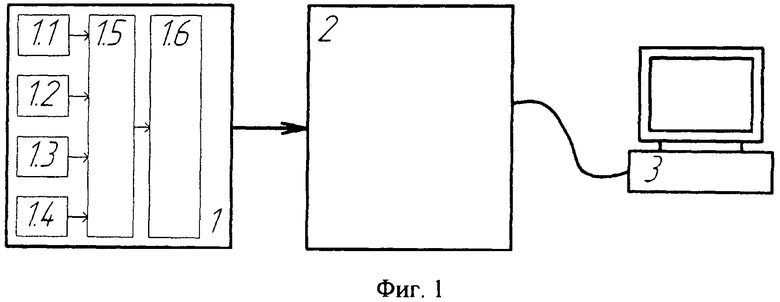
На фиг.1 представлена блок-схема реализации предложенного способа определения азимутальной направленности скважины с использованием GPS.
На фиг.2 представлена схема поверочной установки, оснащенная системой спутниковой навигации GPS.
Предложенный способ реализуется посредством инклинометра 1, связанного геофизическим кабелем с наземным приемным блоком 2 и с персональным компьютером 3. Инклинометр 1 включает гироскопический датчик 1.1, трехкомпонентный магнитометр 1.2, систему трех ортогональных акселерометров 1.3, температурный датчик 1.4, связанный с ними блок оцифровки 1.5, и блок передачи информации 1.6.
Поверочная установка для реализации предложенного способа содержит массивное основание 4 с вертикальной осью 5, установленную на оси 5 поворотную платформу 6 с узлами крепления 7 к платформе 6 инклинометра 1, две антенны 8 системы спутниковой навигации GPS, установленные на платформе 6, и узлы выставки зенитного и визирного углов (не показаны). Поверочная установка имеет интерфейсный блок 9 и приемник сигналов 10 системы спутниковой навигации GPS, связанные с персональным компьютером 3.
На практике предложенное изобретение реализуется следующим образом.
Предварительно настроенный на поверочной инклинометрической установке инклинометр 1, содержащий гироскопический датчик 1.1, трехкомпонентный магнитометр 1.2, систему трех ортогональных акселерометров 1.3, температурный датчик 1.4, связанный с ними блок оцифровки 1.5 и блок передачи информации 1.6, сопрягают посредством каротажного кабеля с наземным приемным блоком 2 и персональным компьютером 3. Проверяют работоспособность инклинометра 1 и опускают его в исследуемую скважину
В зависимости от поставленной задачи исследования скважины проводятся по первому либо по второму варианту предложенного способа.
1. При непрерывном контроле азимутальной направленности скважины предварительно на поверочной инклинометрической установке посредством системы спутниковой навигации GPS выставляется базовое значение азимутального угла α гироскопического датчика 1.1 инклинометра 1, которое сохраняется в ЗУ наземного приемного блока 2. Инклинометр 1 на каротажном кабеле спускается в исследуемую скважину. В процессе непрерывного движения по исследуемой скважине инклинометром 1 посредством блока оцифровки 1.5 производится передача данных с датчиков 1.1-1.4 к наземному приемному блоку 2.
По полученным данным персональным компьютером 3 осуществляется вычисление приращения азимутального угла Δα путем дискретного интегрирования угловой скорости перемещения инклинометра 1 к базовому значению азимутального угла α и определение в соответствии с выбранной математической моделью магнитного азимута и географического азимута траектории исследуемой скважины и определение численного магнитного склонения исследуемой скважины.
Все полученные в процессе измерения данные выводятся на дисплее персонального компьютера в удобном для пользователя виде. Сравнивая численное магнитное склонение с магнитным склонением данной местности, судят о достоверности измеренной данным инклинометром 1 азимутальной направленности исследуемой скважины.
2. При точечном контроле азимутальной направленности скважины
на поверочной инклинометрической установке посредством системы спутниковой навигации GPS осуществляют предварительный контроль точности показаний азимута инклинометра 1.
Далее инклинометр 1 на каротажном кабеле спускается в исследуемую скважину на заданную глубину. Инклинометром 1 посредством блока оцифровки 1.5 производится передача данных с датчиков 1.1-1.4 к наземному приемному блоку 2. По полученным данным персональным компьютером 3 в соответствии с выбранной математической моделью вычисляется значение географического азимута и магнитного азимута, по которым определяется магнитное склонение скважины в данной точке.
Инклинометр 1 спускается на следующую заданную глубину, и цикл измерений повторяется.
В процессе точечного промера всего ствола исследуемой скважины для каждой заданной точки ствола вычисляется магнитное склонение, которое сравнивается с магнитным склонением данной местности. По полученным данным оценивается достоверность измерения азимута инклинометром 1.
Таким образом, предложенный способ контроля азимутальной направленности скважины с использованием GPS (варианты) решает поставленную задачу изобретения в полном объеме. Оснащение поверочной инклинометрической установки системой спутниковой навигации GPS позволяет расширить ее функциональные возможности, а также упростить конструкцию скважинного инклинометра.
Изобретение относится к области промысловой геофизики, в частности к способам определения пространственной ориентации скважин и устройству калибровки скважинного прибора. Техническим результатом изобретения является повышение точности определения азимутальной направленности скважины, обеспечение контроля достоверности работы инклинометра в скважине, а также расширение функциональных возможностей поверочной инклинометрической установки. Способ контроля азимутальной направленности скважины осуществляют в режиме непрерывного или точечного промера скважины. В режиме непрерывного промера измеряют значения азимутального угла и определяют приращение азимутального угла Δα, вычисляемого путем дискретного интегрирования угловой скорости перемещения инклинометра, к базовому значению азимутального угла, определяют по ним магнитный азимут и географический азимут траектории скважины и определяют величину магнитного склонения скважины. В режиме точечного промера исследуемой скважины в каждой заданной точке ствола скважины неподвижным инклинометром измеряют географическое и магнитное значение азимутального угла. Сравнивая измеренные значения магнитного склонения скважины с известной величиной магнитного склонения данной местности, оценивают достоверность измерения величины азимута данным инклинометром. Для настройки скважинного прибора поверочную инклинометрическую установку оснащают системой спутниковой навигации GPS, с помощью которой осуществляют предварительную выставку азимутального угла гироскопа инклинометра как базовое значение и фиксируют это значение в запоминающем устройстве наземной аппаратуры. 3 н.п. ф-лы., 2 ил.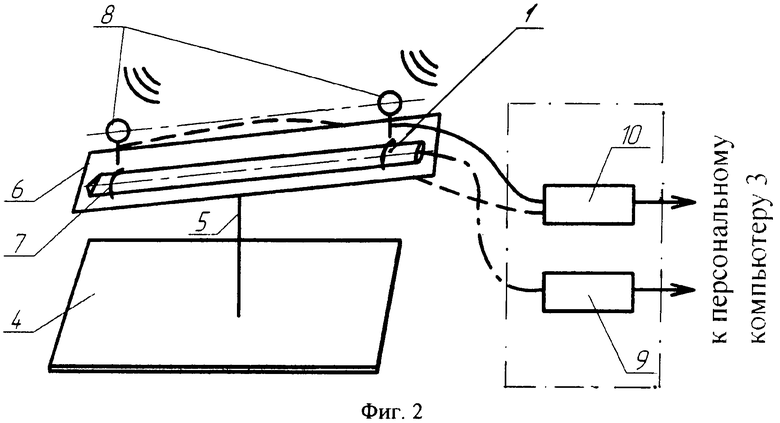
1. Способ контроля азимутальной направленности скважины с использованием GPS, включающий операции предварительной выставки гироскопа инклинометра и проведения измерений в скважине с преобразованием и обработкой получаемой информации наземной аппаратурой, отличающийся тем, что предварительную выставку гироскопа инклинометра осуществляют посредством системы спутниковой навигации GPS путем выставки базового значения азимутального угла, фиксируют базовое значение азимутального угла ЗУ наземной аппаратуры, в процессе движения инклинометра по скважине непрерывно измеряемые значения азимутального угла определяют через приращения азимутального угла Δα, вычисляемого путем дискретного интегрирования угловой скорости перемещения инклинометра, к базовому значению азимутального угла, определяют магнитный азимут и географический азимут траектории скважины и определяют величину магнитного склонения скважины, сравнивают определенное магнитное склонение по всей длине скважины с известной величиной магнитного склонения данной местности, оценивают достоверность измеренных величин азимута.
2. Способ контроля азимутальной направленности скважины с использованием GPS, включающий операции предварительной выставки гироскопа инклинометра и проведение измерений в скважине с преобразованием и обработкой получаемой информации наземной аппаратурой, отличающийся тем, что осуществляют предварительную проверку точности показаний азимута инклинометра посредством системы спутниковой навигации GPS, в процессе точечного промера в каждой заданной точке ствола скважины инклинометром измеряют географическое и магнитное значения азимутального угла, определяют магнитное склонение исследуемого ствола скважины, сравнивают с известной величиной магнитного склонения данной местности и оценивают достоверность измерения величин азимута данным инклинометром.
3. Поверочная инклинометрическая установка для реализации способа контроля азимутальной направленности скважины с использованием GPS, содержащая основание с регулировочными винтами; поворотный стол с узлами фиксации инклинометра, установленный на вертикальной оси основания с возможностью вращения в горизонтальной плоскости; систему дисков и лимбов с червячными передачами и/или электроприводами для выставки задаваемых/проверяемых углов датчиков инклинометра, отличающаяся тем, что она дополнительно снабжена системой спутниковой навигации GPS в виде блока приема сигналов спутниковой навигации GPS, состоящего из интерфейсного блока и приемника сигналов, и как минимум двух антенн, при этом антенны установлены на поворотном столе и разнесены относительно друг друга по базовой линии, параллельной оси поверяемого инклинометра, либо совпадающей с ней, а продольные оси антенн параллельны базовой линии.
| НАУЧНО-ТЕХНИЧЕСКИЙ ВЕСТНИК Санкт-Петербургского государственного университета информационных технологий, механики и оптики, "Механотроника, технологии, системы автоматизированного проектирования" №57, 2008, с.41-46 | |||
| УСТАНОВКА ДЛЯ ГРАДУИРОВКИ И КАЛИБРОВКИ ИНКЛИНОМЕТРОВ | 2008 |
|
RU2364718C1 |
| RU 2004786 C1, 15.12.1993 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1992 |
|
RU2057291C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2000 |
|
RU2166084C1 |
| US 4614040 А1, 30.09.1986 | |||
| US 4706388 A1, 17.11.1987. | |||

