Устройство относится к области исследований и стендовых испытаний инклинометров, в частности для регулировки и калибровки их чувствительных элементов.
Известна установка для настройки и экспериментальных исследований инклинометра (патент Российской Федерации №02178522, Е 21 В 47/02, 20.01.2002), содержащий U-образную подставку в виде плиты и двух вертикальных стоек, установленную на треноге, поворотный стол в виде трех платформ, узел крепления корпуса инклинометра в виде двух штурвалов, цилиндра и сменной цанги, привод разворота и фиксации поворотного стола в виде дисков червячных передач.
Конструкция поворотного стола данной установки может обеспечить заданную точность калибровки чувствительного элемента инклинометра только в определенных пределах зенитных углов, так как платформы поворотного стола ограничивают проходную длину корпуса инклинометра. Данная конструкция требует значительного времени и трудозатрат для калибровки одного инклинометра также из-за ручных операций воспроизведения заданных углов, что ограничивает функциональные возможности поверочной установки в целом.
Для исключения влияния магнитной неоднородности окружающего пространства в помещении участка калибровки инклинометров последний закрепляется в установке консольно с условием расположения чувствительного элемента азимутального угла в центре вращения поворотного стола. В связи с тем, что инклинометр закрепляется не по центру тяжести, для его балансировки требуются дополнительные противовесы, что увеличивает нагрузки на узлы поворотного стола установки.
Кроме того, в данной установке ограничены возможности по увеличению расстояния между опорами вертикальной оси, что увеличивает боковые нагрузки на них, вследствие чего требуются значительные усилия для установки азимутальных углов, поэтому для автоматизации процесса разворота инклинометра в пространстве потребуется значительная мощность привода. Если использовать электродвигатели для автоматизации работы установки и расположить их непосредственно на установке, они внесут погрешности при калибровке инклинометра по азимутальным углам, а автоматизация работы данной установки другими типами приводов затруднительна.
Узел крепления корпуса инклинометра с применением цангового зажима требует набора сменных цанг для инклинометров с разными диаметрами корпусов, что не обеспечивает соосности расположения инклинометра относительно оси зажима и приводит к дополнительным материальным затратам и затратам времени на переотладку установки перед калибровкой каждого последующего прибора.
Известна установка поверочная инклинометрическая УПИ-1 (Каталог продукции ОАО НПФ “Геофизика”, Уфа, 2001 г.), содержащая подставку в виде треноги, поворотный стол с узлом фиксации инклинометра, привод разворота и фиксации поворотного стола, балансировочные противовесы, градуированные лимбы и микровинты грубой и точной установки заданных углов.
Данная установка выполнена на более высоком техническом уровне по сравнению с предыдущей, но принципиально по кинематике не отличается от нее и соответственно обладает всеми недостатками предыдущего аналога, а именно - не обеспечивает автоматизацию воспроизведения заданных углов в процессе калибровки инклинометров.
Задачей настоящего изобретения является расширение эксплуатационных возможностей калибровочной установки за счет автоматизации процесса калибровки, повышение точности калибровки и удобства эксплуатации.
Поставленная задача решается следующим образом.
Автоматизированная установка для калибровки инклинометров, содержащая подставку с регулировочными винтами, поворотный стол с узлом фиксации инклинометра, привод разворота и фиксации поворотного стола, дополнительно снабжена датчиками зенитного и азимутального углов, датчиком нуля азимута, датчиком нуля зенита, лазерным датчиком вертикальной оси, каналом связи с инклинометром, блоком управления приводом и блоком индикации и сопряжения последнего с персональным компьютером, а привод разворота и фиксации поворотного стола снабжен электродвигателями, связанными с опорами вращения поворотного стола. При этом подставка выполнена в виде сборной вертикальной опорной фермы с жестким основанием, поворотный стол выполнен в виде системы из двух рам, превышающих размеры инклинометра, и узла фиксации инклинометра, причем первая рама установлена на опорах вращения между основанием и вершиной опорной фермы, а вторая рама - на опорах вращения внутри первой рамы с возможностью вращения в плоскости, проходящей через ось вращения первой рамы, а узел фиксации инклинометра установлен внутри второй рамы таким образом, что точка пересечения осей вращения рам совпадает с центром тяжести этих рам, центром тяжести узла фиксации инклинометра и центром тяжести самого инклинометра.
Поворотный стол может быть также снабжен третьей рамой, установленной на опорах вращения внутри второй рамы с возможностью вращения вокруг своей продольной оси, совпадающей с продольной осью инклинометра. В этом случае узел фиксации инклинометра устанавливается внутри третьей рамы.
Предложенная конструкция автоматизированной установки для калибровки инклинометров имеет следующие преимущества по сравнению с прототипом:
- наличие в установке системы датчиков азимутального и зенитного углов, датчика нуля азимута, датчика нуля зенита и лазерного датчика вертикальной оси обеспечивает возможность высокоточной установки задаваемых параметров при калибровке инклинометра;
- выполнение подставки в виде сборной вертикальной опорной фермы с массивным основанием большого размера обеспечивает надежную горизонтальную базу установки и жесткость ее вершины в пространстве, а одноопорный тип конструкции подставки обеспечивает калибровку иклинометра по азимутальному углу в пределах 340° при угле поворота в пределах 360°;
- крепление поворотного стола в опорах вращения между основанием и вершиной фермерной опоры позволяет разнести опоры вращения первой рамы поворотного стола относительно друг друга на расстояние, достаточное для установки электродвигателей, обеспечивающих автоматическое вращение поворотного стола и/или его элементов в процессе калибровки инклинометра. Кроме того, предложенная конструкция позволяет за счет применения длинных валов электропривода отнести электродвигатели от редукторов на расстояние, при котором влиянием магнитных масс электродвигателей на чувствительность инклинометра можно пренебречь;
- выполнение конструкции поворотного стола, обеспечивающей пересечение осей вращения рам в точке пространства, совпадающей с центром тяжести всех рам, с центром тяжести узла фиксации инклинометра и центром тяжести самого инклинометра, существенно снижает нагрузку на опоры вращения, уменьшает требуемый уровень мощности электропривода поворотных рам и позволяет отказаться от использования регулируемых противовесов как в известных устройствах;
- симметричность конструкции поворотного стола и сбалансированность нагрузочных моментов на узлах вращения обеспечивает стабильность метрологических характеристик поверочной установки;
- наличие электропривода поворотного стола, датчиков азимутального и зенитного углов, а также блока сопряжения указанных датчиков и инклинометра с внешним компьютером обеспечивает автоматический режим работы поверочной установки;
- наличие третьей рамы в конструкции поворотного стола расширяет функциональные возможности предложенной автоматизированной установки для калибровки инклинометров, поскольку обеспечивает одновременную регистрацию ориентации инклинометра в пространстве и вокруг собственной оси;
- конструкция привода разворота и фиксации поворотного стола в виде совокупности электродвигателей вращения рам и редукторов с червячной передачей для каждой из рам обеспечивает возможность проведения калибровки инклинометров как в автоматическом, так и в полуавтоматическом режиме с ручным управлением электроприводом в зависимости от условий эксплуатации данной калибровочной установки;
- автоматизация процесса калибровки инклинометров позволяет повысить качество калибровки, снизить временные затраты на калибровку, обеспечить использование данных калибровки в сетевой системе связи каротажных станций и интерпретационной службы предприятия.
Предложенное техническое решение не требует для практической реализации специальных материалов и оборудования, просто в практической реализации. В конструкции используются промышленно выпускаемые комплектующие элементы.
Заявителю не известны технические решения, содержащие сходные признаки, отличающие заявляемое техническое решение от прототипа.
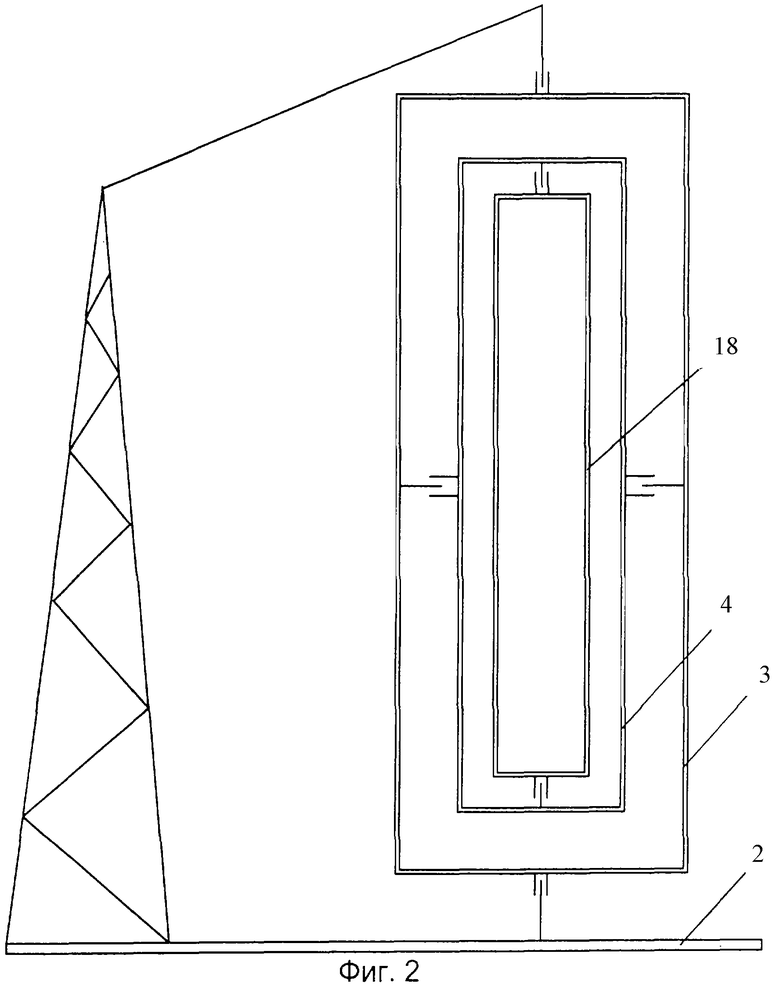
На фиг.1 представлен вариант автоматизированной установки для калибровки инклинометров с поворотным столом, состоящим из двух рам.
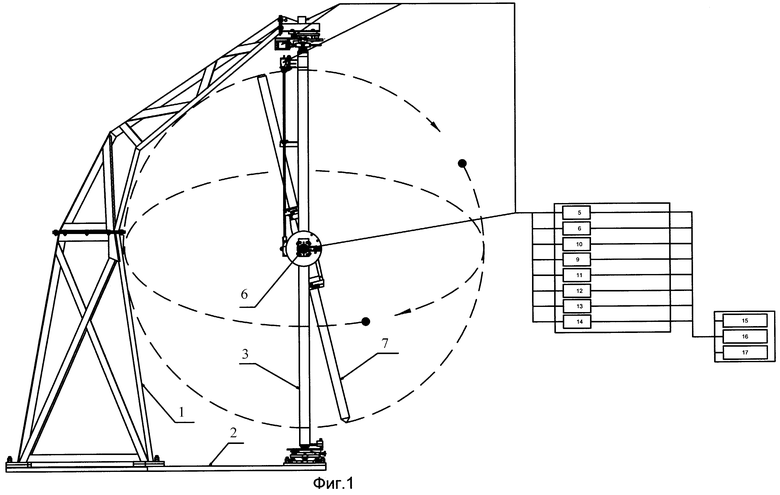
На фиг.2 схематично показано расположение поворотного стола в опорной ферме (вариант из трех рам).
Автоматизированная установка для калибровки инклинометров (далее по тексту - калибровочная установка) содержит подставку в виде сборной (из двух частей) опорной фермы 1 из немагнитного материала с жестким основанием 2 в виде опорной рамы с местами крепления к полу, повортный стол, состоящий из рам 3 и 4, привод разворота и фиксации поворотного стола в виде шагового двигателя зенитных углов 5 и шагового двигателя азимутальных углов 6, узел фиксации 7 инклинометра 8, датчики положения азимута и зенитного угла 9 и 10 соответственно, датчик нуля азимута 11, датчик нуля зенита 12, лазерный датчик вертикальной оси 13, канал связи 14 с инклинометром 8, блок управления 15 приводом, блок индикации и сопряжения 16 блока управления 15 с персональным компьютером 17.
Работа на предложенной калибровочной установке осуществляется следующим образом.
Подставка предварительно монтируется в отведенном для установки месте. Поскольку опорая ферма 1 сборная, производится ее сборка и крепление основания 2 к полу анкерными болтами. Затем устанавливается поворотный стол в соответствующие опоры вращения между основанием и вершиной опорной фермы 1. С помощью оптического угломера-квадранта по датчику 13 производится настройка вертикальной оси установки. Перед процессом калибровки на корпусе калибруемого инклинометра 8 наносится метка, определяющая центр тяжести прибора - то есть посадочное место прибора в поворотном столе установки. В соответствии с данной меткой производится монтаж калибруемого инклинометра 8 в узле фиксации 7 в горизонтальном положении. Включается процесс калибровки. Процесс калибровки может осуществляться как в автоматическом, так и в полуавтоматическом режиме с ручным управлением приводом в зависимости от условий эксплуатации данной калибровочной установки. Режим калибровки задается блоком управления 15. В автоматическом режиме ручной режим отключен, и автоматический процесс включается по умолчанию. Через блок индикации и сопряжения 16 включается электропитание датчиков 9-12, показания которых высвечиваются на индикаторах блока 16 и подаются в компьютер 17. По соответствующей программе компьютером 17 включаются шаговые двигатели 5 и 6. При этом узел фиксации 7 с инклинометром 8 выставляется на нулевое значение по азимутальному и зенитному углам. Затем по соответствующей программе компьютером 17 устанавливаются последовательно заданные положения калибруемого инклинометра 8 в пространстве с остановками в реперных точках либо в непрерывном режиме вращения в зависимости от поставленной задачи. Полученные с датчиков 9-12 данные считываются и индицируются блоком сопряжения и индикации 16, и подаются на компьютер 17. Компьютером 17 производится обработка данных по углам ориентации калибруемого инклинометра 8 и формирование протокола и сертификата калибровки. По окончании процесса калибровки инклинометр 8 автоматически возвращается в исходное горизонтальное положение и извлекается из узла фиксации 7.
В случае необходимости (по требованию заказчика) поворотный стол данной калибровочной установки может быть собран из трех рам – 3, 4 и 18. Рама 18 снабжена узлами разворота и приборами измерения углов поворота аналогично другим рамам. Расположение рам 3, 4 и 18 относительно друг друга показано на фиг.2. Процесс калибровки инклинометра 8 в этом случае производится в описанной выше последовательности.
При использовании данной калибровочной установки в автономных условиях возможно проведение калибровки инклинометра в полуавтоматическом режиме с ручным управлением выставления пространственных углов. Скорость перемещения инклинометра в пространстве в автоматическом режиме составляет 1 об/мин в азимутальной плоскости.
Таким образом, предложенное техническое решение, а именно
- автоматизированная установка для калибровки инклинометров обеспечивает калибровку инклирометра по азимутальному углу в пределах 340° при угле поворота в пределах 360°;
- обеспечивает независимо от габаритных размеров калибруемого инклинометра демпферную укладку последнего в посадочное место узла фиксации установки, что позволяет сохранить аттестационные характеристики самой калибровочной установки.
Конструкция поворотного стола обеспечивает применение маломощных малогабаритных электродвигателей, не искажающих магнитного поля окружающего пространства в пределах чувствительности калибруемого инклинометра.
Конструкция привода разворота и фиксации поворотного стола в виде совокупности шаговых электродвигателей и редукторов с червячными передачами позволяет проводить калибровку инклинометров в автоматическом или полуавтоматическом режимах с ручным управлением электроприводом в зависимости от условий эксплуатации данной калибровочной установки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД КАЛИБРОВКИ ИНКЛИНОМЕТРОВ | 2023 |
|
RU2807632C1 |
| КОМПЛЕКС ДЛЯ ПОВЕРКИ И КАЛИБРОВКИ СКВАЖИННЫХ ИНКЛИНОМЕТРОВ | 2010 |
|
RU2439493C1 |
| КАЛИБРОВОЧНАЯ УСТАНОВКА ДЛЯ ПОВЕРКИ СКВАЖИННЫХ ТЕРМОМЕТРОВ-МАНОМЕТРОВ | 2002 |
|
RU2215998C1 |
| УСТАНОВКА ДЛЯ ГРАДУИРОВКИ И КАЛИБРОВКИ ИНКЛИНОМЕТРОВ | 2008 |
|
RU2364718C1 |
| КОМПЛЕКС ИНКЛИНОМЕТРИЧЕСКОЙ СКВАЖИННОЙ АППАРАТУРЫ И СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СКВАЖИН | 2000 |
|
RU2193654C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ МАГНИТНОЙ ДЕВИАЦИИ ИНКЛИНОМЕТРА | 2000 |
|
RU2186966C2 |
| СПОСОБ КОНТРОЛЯ АЗИМУТАЛЬНОЙ НАПРАВЛЕННОСТИ СКВАЖИНЫ С ИСПОЛЬЗОВАНИЕМ GPS (ВАРИАНТЫ) И ПОВЕРОЧНАЯ ИНКЛИНОМЕТРИЧЕСКАЯ УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА КОНТРОЛЯ АЗИМУТАЛЬНОЙ НАПРАВЛЕННОСТИ СКВАЖИНЫ С ИСПОЛЬЗОВАНИЕМ GPS | 2010 |
|
RU2433262C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ | 2003 |
|
RU2250993C1 |
| УСТАНОВКА ДЛЯ НАСТРОЙКИ И ЭКСПЕРИМЕНТАЛЬНЫХ ИССЛЕДОВАНИЙ ИНКЛИНОМЕТРОВ | 1999 |
|
RU2178522C2 |
Использование: в области исследований и стендовых испытаний инклинометров, в частности для регулировки и калибровки их чувствительных элементов. Сущность: автоматизированная установка для калибровки инклинометров содержит подставку с регулировочными винтами, поворотный стол с узлом фиксации инклинометра, привод разворота и фиксации поворотного стола, датчики зенитного и азимутального углов, датчик нуля азимута, датчик нуля зенита, лазерный датчик вертикальной оси, канал связи с инклинометром, блок управления приводом, блок индикации и сопряжения последнего с персональным компьютером. Привод разворота и фиксации поворотного стола снабжен электродвигателями, связанными с опорами вращения поворотного стола. Подставка выполнена в виде сборной вертикальной опорной фермы с жестким основанием. Поворотный стол выполнен в виде системы из двух рам, превышающих размеры инклинометра, и узла фиксации инклинометра. Первая рама установлена на опорах вращения между основанием и вершиной опорной фермы. Вторая рама установлена на опорах вращения внутри первой рамы с возможностью вращения в плоскости, проходящей через ось вращения первой рамы. Узел фиксации инклинометра установлен внутри второй рамы так, что точка пересечения осей вращения рам совпадает с центром тяжести этих рам, центром тяжести узла фиксации инклинометра и центром тяжести самого инклинометра. В другом варианте автоматизированной установки поворотный стол выполнен в виде системы из трех рам. Третья рама установлена на опорах вращения внутри второй рамы с возможностью вращения вокруг своей продольной оси, совпадающей с продольной осью инклинометра. Технический результат - осуществление автоматизации процесса калибровки, повышение точности калибровки и удобства эксплуатации. 2 н.п. ф-лы, 2 ил.
| Каталог продукции ОАО НПФ “Геофизика”, Уфа, 2001 | |||
| УСТАНОВКА ДЛЯ НАСТРОЙКИ И ЭКСПЕРИМЕНТАЛЬНЫХ ИССЛЕДОВАНИЙ ИНКЛИНОМЕТРОВ | 1999 |
|
RU2178522C2 |
| Установка для настройки и экспериментальных исследований инклинометров | 1986 |
|
SU1441061A1 |
| FR 1226960 А, 20.10.1966 | |||
| US 3726349 А, 10.04.1973. | |||

