г
Изобретение относится к куэнечно- прессовому машиностроению, в частности к конструкциям механических прессов.
Цель изобретения - повышение надежности и расширение технологических возможностей пресса за счет внут РИ1Д1КЛОВОГО регулирования и контроля величины технологического усилия, CK рости и хода ползуна.
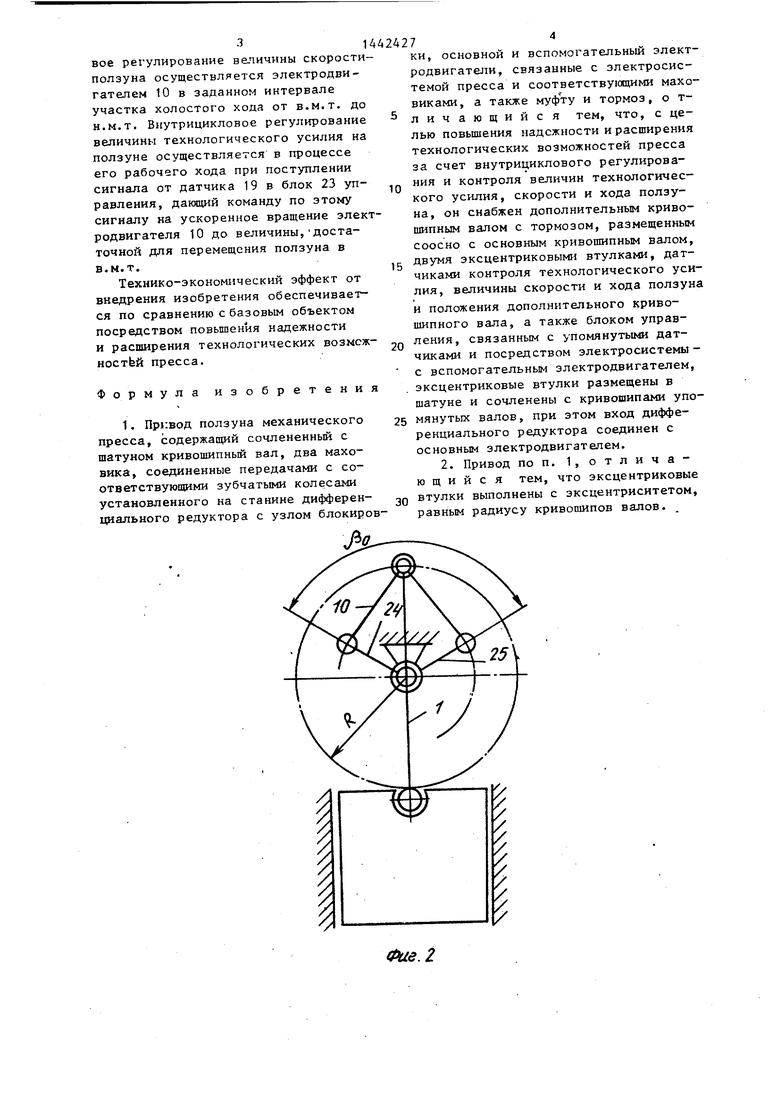
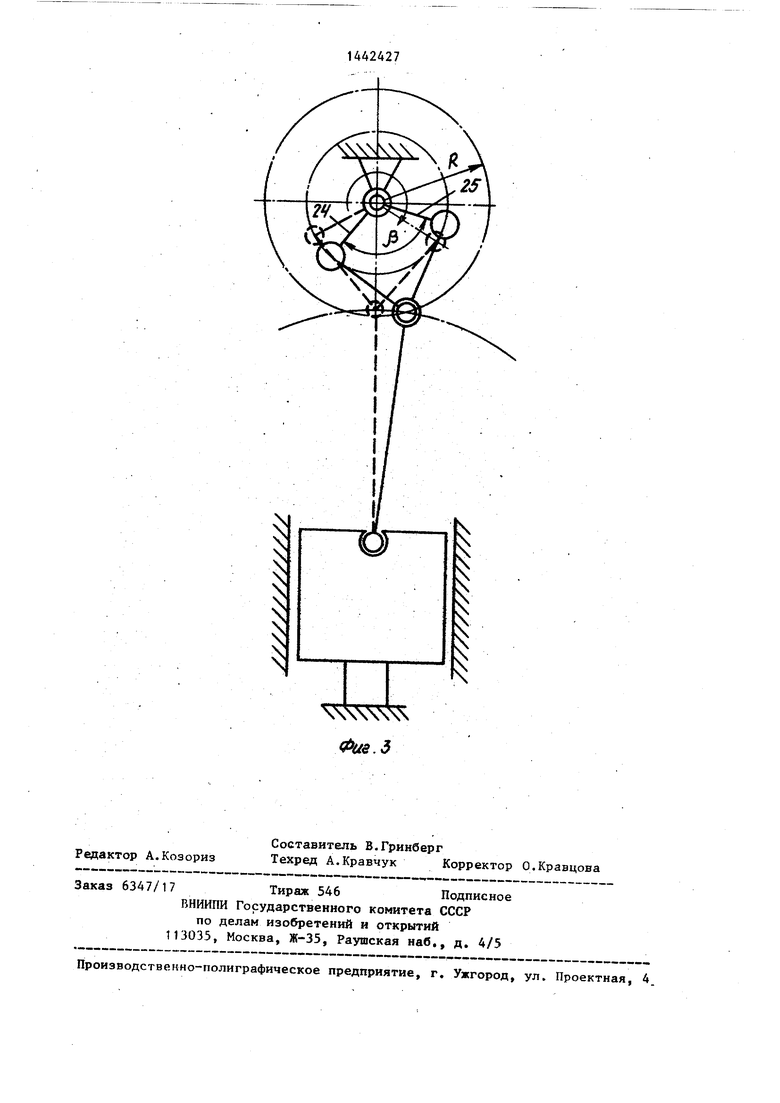
На фиг. 1 показана схема привода, общий ВИД; на фиг, 2 - детали привода при нахождении ползуна в верхнем положении, на фиг. 3 - то же, при нахождении ползуна на участке рабочего хода и в его нижнем положении (при остановке ползуна на жестком упоре).
Привод содержит сочлененный с шатуном 1 кривошипный вал 2 с муфтой 3 и тормозом 4, маховики 5 и 6, соединенные клиноременными передачами 7 и 8 с основным 9 и вспомогательным
и муфта 3 выключена, а тормоза А и 15 включены.
Далее выключается тормоз 15 и В1;лю1;1ается вспомогательньй электродвигатель 10. Посредством уравнове- шивателя (не показан) и элекродвига- теля 10 вал 14 устанавливается в положение, обеспечивающее заданную величину радиуса R. Электродвигатель выключается, тормоз 15 включается,
редуктор блокируется.
При наладочном (толчковом) режиме при установленном ходе ползуна 16, блокированной редукторе, включенной муфте 3, выключенных тормозах 4 и 15 периодическим включением - выключением электродвигателя 10 и тормозов 4 и 15 производится наладка пресса, т.е. осуществляется наладочное перемещение ползуна 16.
При работе на одиночных ходах ползуна, отсутствии перегрузки по усилию, и при блокированном дифференциальном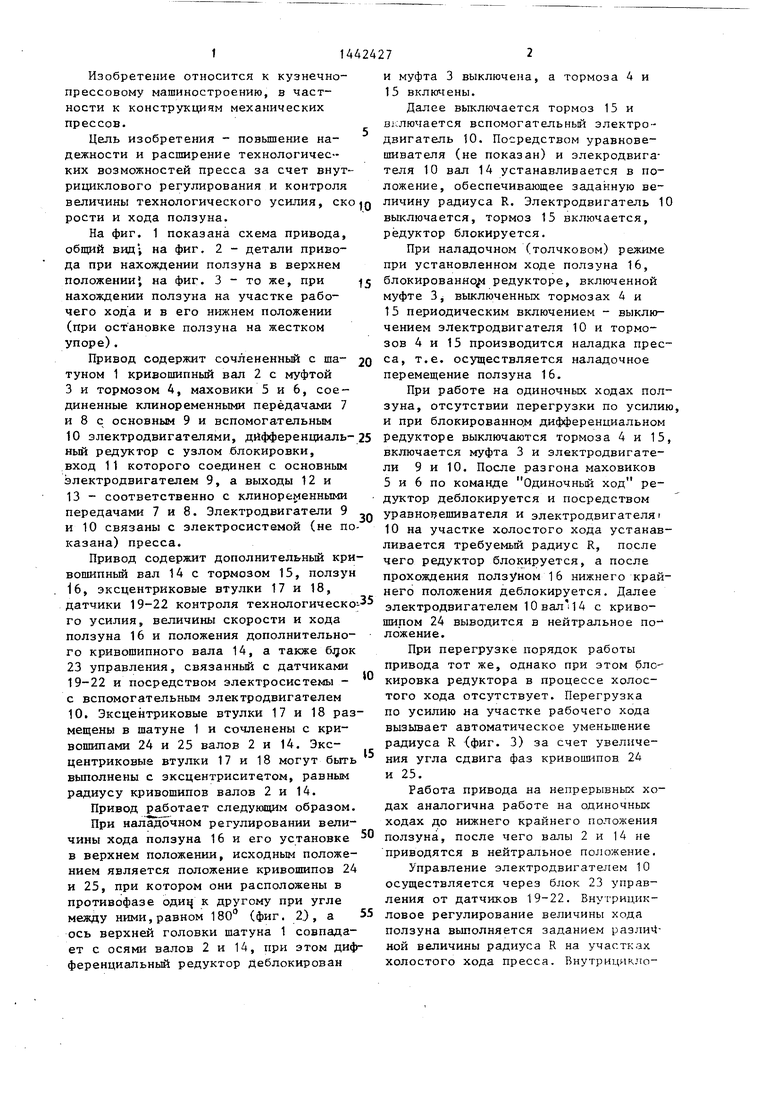
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ПОЛЗУНА МЕХАНИЧЕСКОГО ПРЕССА | 2005 |
|
RU2283233C1 |
| ПРИВОД МЕХАНИЧЕСКОГО ПРЕССА | 2005 |
|
RU2288100C1 |
| ТОРМОЗ КРИВОШИПНОГО ПРЕССА | 2007 |
|
RU2350797C1 |
| ВИНТОВОЙ ПРЕСС С ЦИКЛОВЫМ ПРИВОДОМ | 2013 |
|
RU2536619C1 |
| Кривошипный пресс | 1984 |
|
SU1252190A1 |
| Кривошипный пресс | 1990 |
|
SU1776236A3 |
| МЕХАНИЗМ РЕГУЛИРОВКИ ХОДА ПОЛЗУНА КРИВОШИПНОГО ПРЕССА | 2002 |
|
RU2223862C2 |
| КРИВОШИПНО-ЭКСЦЕНТРИКОВЫЙ ПРЕСС | 2003 |
|
RU2252873C1 |
| Система управления механического пресса | 1970 |
|
SU366674A1 |
| ВСПОМОГАТЕЛЬНЫЙ ПРИВОД МЕХАНИЧЕСКОГО ПРЕССА | 1993 |
|
RU2015923C1 |
Изобретение относится к кузнечно- прессовому машиностроению, в частности к Конструкциям механических прессов. Цель изобретения - повьшение надежности и расширение технологических возможностей пресса за счет внутрицик- лового регулирования и контроля величин технологического усилия, скорости и хода ползуна. Использование вспомогательного электродвигателя 10 позволяет через клиноременную передачу 8 и кривошипный вал 14 с эксцентриковой втулкой 18 изменять положение как шатуна 1, так и ползуна 16 при наладочных (толчковых) режимах и при работе на холостых и рабочих ходах. При этом привод пресса осуществляется от основного электродвигателя 9 через дифференциальный редуктор и клиноременную передачу 7, а также через кривошипный вал 2 с эксцентриковой втулкой 17. Наличие валов 2 и 14 обеспечивает повышение надежности привода при заклинивании пресса. 1 з.п. ф-лы, 3 ил. (Л
10 электродвигателями, дйфференциаль-25 редукторе выключаются тормоза 4 и 15,
ный редуктор с узлом блокировки, вход 11 которого соединен с основным Ьлектродвигателем 9, а выходы 12 и 13 - соответственно с клиноре1:1енными передачами 7 и 8. Электродвигатели 9 и 10 связаны с электросистемой (не показана) пресса.
Привод содержит дополнительньм кривошипный вал 14 с тормозом 15, ползун 16, эксцентриковые втулки 17 и 18,
включается муфта 3 и электродвигате ли 9 и 10. После разгона маховиков 5 и 6 по команде Одиночный ход ре дуктор деблокируется и посредством 30 УРавно1 ешивателя и электродвигателя 10 на участке холостого хода устана ливается требуемый радиус R, после чего редуктор блокируется, а после прохождения ползуном 16 нижнего край него положения деблокируется. Далее
датчики 19-22 контроля технологическо-35 электродвигателем 10 вал 14 с кривос датчиками
го усилия, величины скорости и кода ползуна 16 и положения дополнительного кривошипного вала 14, а также 6jjoK 23 управления, связанньй 19-22 и посредством электросистемы с вспомогательным электродвигателем 10. Эксцентриковые втулки 17 и 18 размещены в шатуне 1 и сочленены с кривошипами 24 и 25 валов 2 и 14. Эксцентриковые втулки 17 и 18 могут быть вьшолнены с эксцентриситетом, равным радиусу кривошипов валов 2 и 14.
Привод работает следующим образом.
При наладочном регулировании величины хода ползуна 16 и его установке в верхнем положении, исходным положением является положение кривошипов 24 и 25, при котором они расположены в противофазе одиц к другому при угле между ними, равном 180 (фиг. 2.), а ось верхней головки шатуна 1 совпадает с осями валов 2 и 14, при этом дифференциальный редуктор Деблокирован
включается муфта 3 и электродвигатели 9 и 10. После разгона маховиков 5 и 6 по команде Одиночный ход редуктор деблокируется и посредством УРавно1 ешивателя и электродвигателя 10 на участке холостого хода устанавливается требуемый радиус R, после чего редуктор блокируется, а после прохождения ползуном 16 нижнего крайнего положения деблокируется. Далее
электродвигателем 10 вал 14 с криво
5
5
0
шипом 24 выводится в нейтральное по- ложение.
При перегрузке порядок работы привода тот же, однако при этом блокировка редуктора в процессе холостого хода отсутствует. Перегрузка по усилию на участке рабочего хода вызывает автоматическое уменьшение радиуса R (фиг. 3) за счет увеличения угла сдвига фаз кривошипов 24 и 25.
Работа привода на непрерывных ходах аналогична работе на одиночных ходах до нижнего крайнего положения ползуна. После чего валы 2 и 14 не приводятся в нейтральное положение.
Управление электродвигателем 10 осуществляется через блок 23 управления от датчиков 19-22. Внутрицик- ловое регулирование величины хода ползуна выполняется заданием разли11- ной величины радиуса R на участках холостого хода пресса, Внутрицик; оФие.2
| Привод для кривошипных кузнечно-прессовых машин | 1958 |
|
SU121660A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
