Известны вышивальные машины, включающие платформу с пяльцами для закрепления вышиваемого материала, приводимую в возвратно-поступательное движение в двух взаимно-перпендикулярных направлениях от двух независимых исполнительных механизмов. Последние кинематически связаны с платформой и получают импульсы от программной перфорированной ленты.
Предлагаемая вышивальная машина имеет ряд особенностей, которые позволяют упростить ее конструкцию и расширить диапазон полу; чения рисунков вышивки. Существо их заключается в том, что каждый исполнительный механизм выполнен в виде смонтированных на неподвижном валу и последовательно соединенных шестеренчатых дифференциалов; на водиле каждого из них посажено два храповика с противоположно направленными зубьями (для сложения и вычитания величины хода платформы). Храповики приводятся во вращение посредством рычата с подпружиненной собачкой от электромагнита, получаюихего импульсы от программной перфорированной ленты.
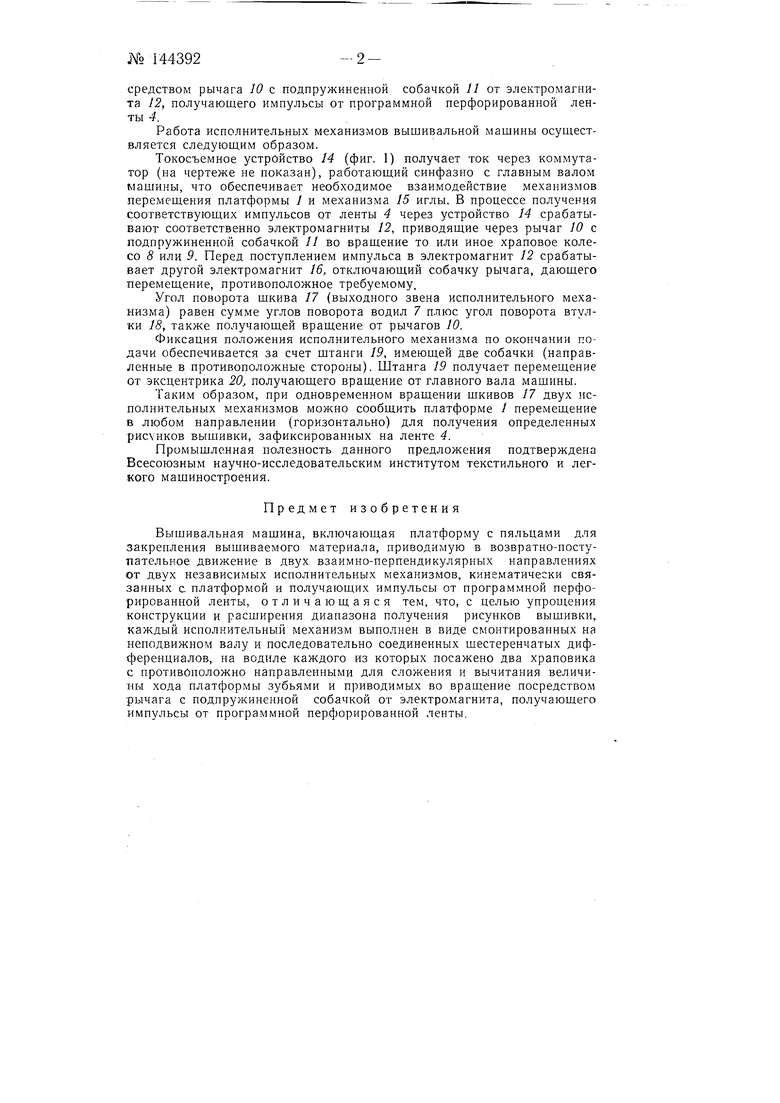
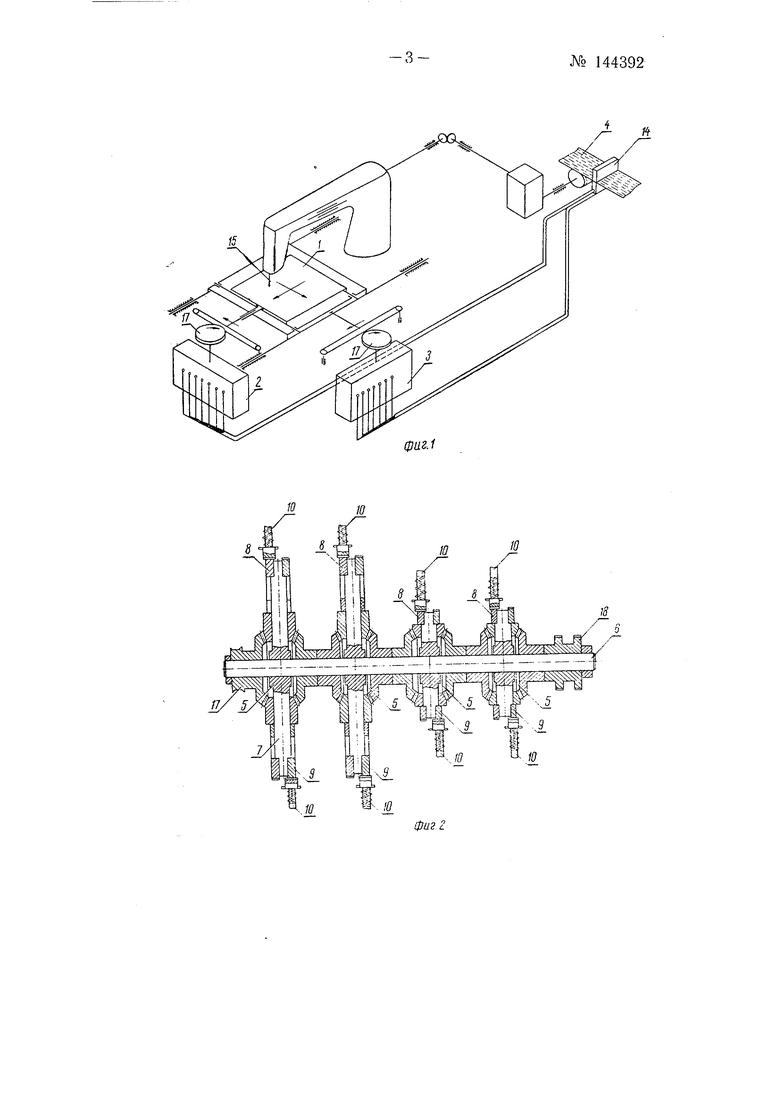
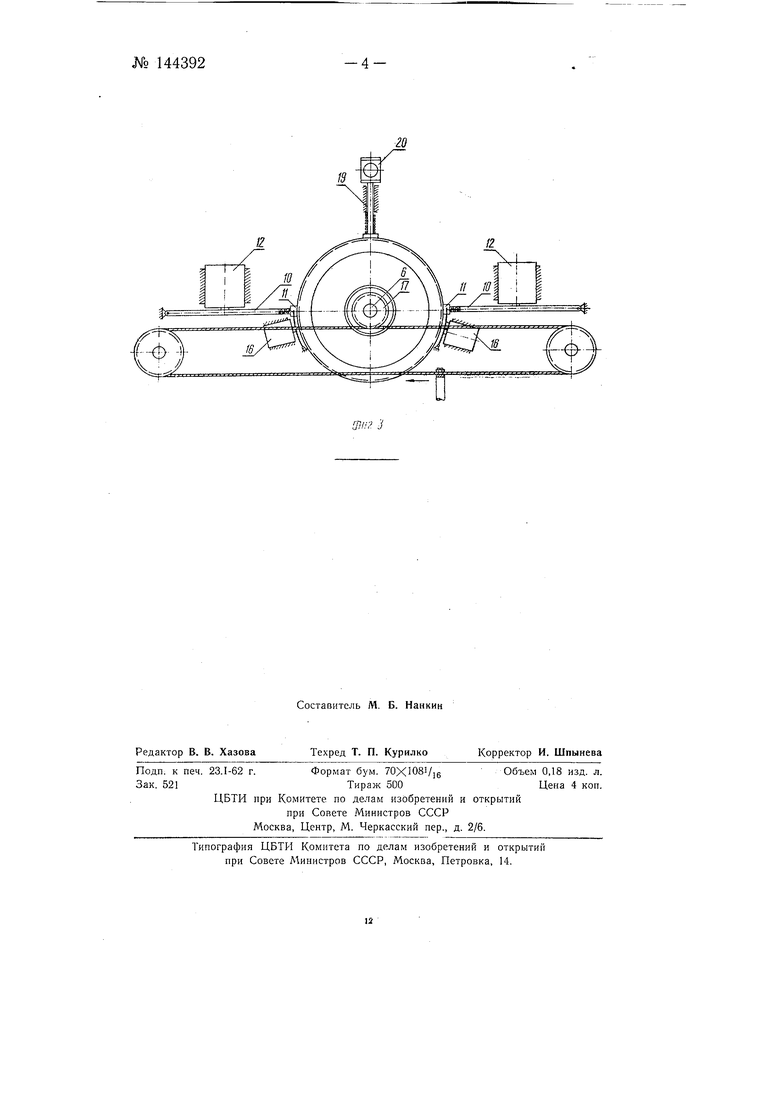
На фиг. 1 изображена принципиальная схема вышивальной машины; на фиг. 2 - продольный разрез исполнительного механизма машины; на фиг. 3 - вид с торца вала исполнительного механизма.
Вышивальная машина (фиг. 1) включает платформу / с пяльцами для закрепления вышиваемого материала, приводимую в возвратцо-поступательное движение в двух взаимно-перпендикулярных направлениях от двух независимых исполнительных механизмов 2 т 3, кинематически связанных с платформой 1 и получающих импульсы от программной перфорированной ленты . Исполнительный механизм выполнен в виде шестеренчатых дифференциалов 5, смонтированных на неподвижном валу б и соединенных между собой последовательно. На водиле 7 каждого дифференциала 5 посажено два храповика (храповых колеса) 8 и 9 с противоположно направленными зубьями для сложения и вычитания величины хода платформы /. Храповики приводятся во вращение по№144392-2средством рычага 10 с подпружиненной собачкой 11 от электромагнита 12, получающего импульсы от программной перфорированной ленты 4.
Работа исполнительных механизмов вышивальной машины осушествляется следуюшим образом.
Токосъемное устройство 14 (фиг. 1) получает ток через коммутатор (на чертеже не показан), работаюш,ий синфазно с главным валом машины, что обеспечивает необходимое взаимодействие механизмов перемешения платформы 1 и механизма 15 иглы. В процессе получения соответствующих импульсов от ленты 4 через устройство 14 срабатывают соответственно электромагниты 12, приводящие через рычаг 10 с подпружиненной собачкой 11 во вращение то или иное храповое колесо 8 или 9. Перед поступлением импульса в электромагнит 12 срабатывает другой электромагнит 16, отключающий собачку рычага, дающего перемещение, противоположное требуемому.
Угол поворота шкива 17 (выходного звена исполнительного механизма) равен сумме углов поворота водил 7 плюс угол поворота втулки 18, также получающей вращение от рычагов 10.
Фиксация положения исполнительного механизма по окончании подачи обеспечивается за счет штанги 19, имеющей две собачки (направленные в противоположные стороны). Штанга 19 получает перемещение от эксцентрика 20, получающего вращение от главного вала машины.
Таким образом, при одновременном вращении шкивов 17 двух исполнительных механизмов можно сообщить платформе / перемещение в любом направлении (горизонтально) для получения определенных вышивки, зафиксированных на ленте 4.
Промышленная полезность данного предложения подтверждена Всесоюзным научно-исследовательским институтом текстильного и легкого машиностроения.
Предмет изобретения
Вышивальная машина, включаюшая платформу с пяльцами для закрепления вышиваемого материала, приводимую в возвратно-поступательное движение в двух взаимно-перпендикулярных направлениях от двух независимых исполнительных механизмов, кинематически связанных с платформой и получаюших импульсы от программной перфорированной ленты, отличающаяся тем, что, с целью упрощения конструкции и расширения диапазона получения рисунков вышивки, каждый исполнительный механизм выполнен в виде смонтированных на неподвижном валу и последовательно соединенных шестеренчатых дифференциалов, на водиле каждого из которых посажено два храповика с противоположно направленными для сложения и вычитания величины хода платформы зубьями и приводимых во вращение посредством рычага с подпружиненной собачкой от электромагнита, получающего импульсы от программной перфорированной ленты.