Фае.
1U
Изобретение отнвсится к области радиотехники и может быть испольова- но при проектировании несущих конструкций радиоэлектронной аппаратуры
Цепь изобретения - повьшение удобств эксплуатации за счет обеспечения устойчивого положения панели управления в процессе эксплуатации радиоэлектронного блока.
На фиг. 1 изображен общий вид радиоэлектронного блока; на фиг. 2 - вид А на фиг.I; на фиг. 3 - вид Б на фиг.2; на фиг. 4 - сечение В-В на фиг. 3; на фиг.5 - схема сил, действующих в механизме поворота панели управления, при приложении усилия оператора в крайней точке панели; на фиг. 6 - узел I на фиг. 5 (схема
N
Силу N можно разложить на
тящего момента Р 1 возникает сила Р 1 m
две составляющие: N, направленную перпенднкулярно боковой продольной поверхности паза, которая уравновешивается нормальной реакцней N верхней поверхности паза в точке Е (по
линии ЕВ), и N«, направленную по касательной к продольной оси паза в точке В (по линии BF). Составляющая sin/-, где |- - угол между прямой ОБ, соединяющей оси в точках О и В на
боковой грани панели 5 и касательной BF к продольной криволинейной оси паза в точке В. Под действием Nf панель с закрепленными на ней осями с роликами стремится переместиться по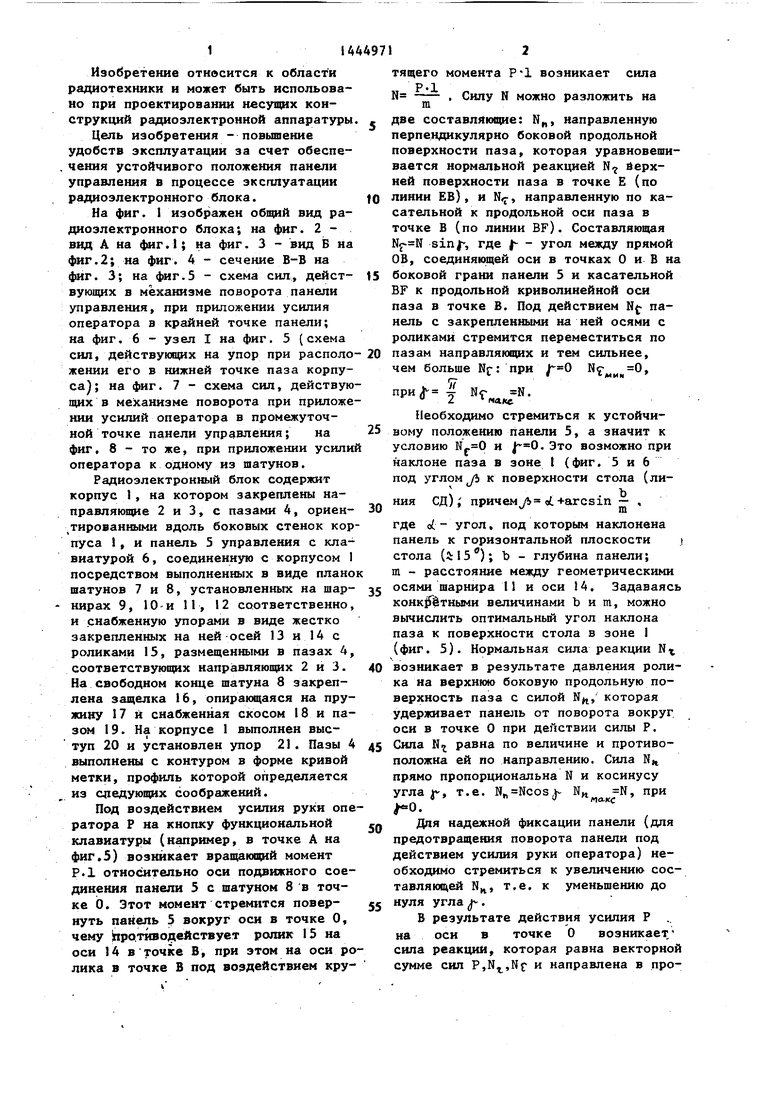

| название | год | авторы | номер документа |
|---|---|---|---|
| Радиоэлектронный блок | 1988 |
|
SU1628238A1 |
| РАДИОЭЛЕКТРОННЫЙ БЛОК | 1992 |
|
RU2069037C1 |
| ЭЛЕКТРОПРИВОДНОЕ УСТРОЙСТВО ДЛЯ ДЕМОНСТРАЦИИ СНИМКОВ | 1994 |
|
RU2122228C1 |
| Машина ударного действия | 1990 |
|
SU1798167A1 |
| Радиоэлектронный блок | 1988 |
|
SU1598233A1 |
| Захватное устройство | 1988 |
|
SU1613226A1 |
| Став ленточного конвейера | 1984 |
|
SU1433876A1 |
| Корпус радиоэлектронного прибора | 1978 |
|
SU805502A1 |
| АВТОМАТИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ | 1993 |
|
RU2115191C1 |
| УЗЕЛ УПРАВЛЕНИЯ КРЫЛОМ МАХОЛЕТА | 2001 |
|
RU2221730C2 |



N.
сил, действующих на упор при располо- 20 пазам направляющих и тем сильнее, жении его в нижней точке паза корпу- чем больше Nj-: при , са); на фиг. 7 - схема сил, действую- щих в механизме поворота при приложении усилий оператора в промежуточной точке панели управления; на 25 вому положению панели 5, а значит к фиг, 8 - то же, при приложении усилий условию N.0 и . Это возможно при
наклоне паза в зоне I (фиг. 5 и 6 под углом j к поверхности стола (липри ЙС„
Необходимо стремиться к устойчи30
оператора к одному из шатунов.
Радиоэлектронный блок содержит корпус I, на котором закреплены направляющие 2 и 3, с пазами 4, ориентированными вдоль боковых стенок корпуса , и панель 5 управления с клавиатурой 6, соединенную с корпусом I посредством выполненных в виде планок шатунов 7 и 8, установленных на шар- 35 осями шарнира И и оси 14. Задаваясь нирах 9, 10-и 11, 12 соответственно, конкретными величинами b и т, можно и снабженную упорами в виде жестко закрепленных на ней осей 13 и 14 с роликами 15, размещенными в пазах 4, соответствую1цих направляющих 2 и 3. На свободном конце шатуна 8 закреплена защелка 1 б, опирающаяся на пружину 17 и снабженная скосом 18 и пазом 19. На корпусе 1 выполнен выступ 20 и установлен упор 21 . Пазы 4 дЗ Сила Ы равна по величине н противо- выполнены с контуром в форме кривой положна ей по направлению. Сила метки, профиль которой определяется из следующих соображений.
ния СД); причем Л et+arcsin - ,
m
где о(- угол, под которым наклонена панель к горизонтальной плоскости стола (4 IS); b - глубина панели; m - расстояние между геометрическими
вычислить оптимальный угол наклона паза к поверхности стола в зоне 1 (фиг. 5). Нормальная сила реакции N 40 возникает в результате давления ролика на верхнюю боковую продольную поверхность паза с силой , которая удерживает панель от поворота вокруг оси в точке О при действии силы Р.
прямо пропорциональна N и косинусу угла 1, т.е. ,ь- N,i N, при 1-0.
Под воздействием усилия руки оператора Р на кнопку функциональной клавиатуры (например, в точке А на фиг.5) возникает вращаю1ций момент Р.1 относительно оси подвижного соединения панели 5 с шатуном 8 в точке 0. Этот момент стремится повернуть панель 5 вокруг оси в точке О, чему Ьро.тиводействует ролик 15 на оси 14 в точке В, при этом на оси ролика в точке В под воздействием кру- сумме сил P,N,Nf и направлена в .
пазам направляющих и тем сильнее, чем больше Nj-: при , вому положению панели 5, а значит к условию N.0 и . Это возможно при
при ЙС„
Необходимо стремиться к устойчи
осями шарнира И и оси 14. Задаваясь конкретными величинами b и т, можно Сила Ы равна по величине н противо- положна ей по направлению. Сила
ния СД); причем Л et+arcsin - ,
m
где о(- угол, под которым наклонена панель к горизонтальной плоскости стола (4 IS); b - глубина панели; m - расстояние между геометрическими
осями шарнира И и оси 14. Задаваясь конкретными величинами b и т, можно Сила Ы равна по величине н противо- положна ей по направлению. Сила
вычислить оптимальный угол наклона паза к поверхности стола в зоне 1 (фиг. 5). Нормальная сила реакции N возникает в результате давления ролика на верхнюю боковую продольную поверхность паза с силой , которая удерживает панель от поворота вокруг оси в точке О при действии силы Р.
осями шарнира И и оси 14. Задаваясь конкретными величинами b и т, можно Сила Ы равна по величине н противо- положна ей по направлению. Сила
прямо пропорциональна N и косинусу угла 1, т.е. ,ь- N,i N, при 1-0.
Для надежной фиксации панели (для предотвращения поворота панели под действием усилия руки оператора) необходимо стремиться к увеличению составляющей N, т.е. к уменьшению до нуля угла.
В результате действия усилия Р .. на оси в точке О возникает/ сила реакции, которая равна векторной
тивоположную сторону, т.е. R +
-«-ЙГ./.
Под действием усилия Р рычаг OU стремится повернуться вокруг оси в точке и. Момент вращения численно равен произведению векторной суммы сил Р, N и N на плечо S и направлен- в т же сторону. Этот момент уравновешивается моментом силы реакции М, чис- ленно равным М-1()-S, и возникающий в результате взаимодействия рычага ои с упором в точке Т.
Под действием усилия Р на оси в точке и возникает сила реакции (Г, численно равная и противоположно направленная проекции векторной суммы сил Р, N, и Nrj- на продольную ось рычага (прямая ои).
При нажатии оператором, на другую кнопку функциональной клавиатуры (например, в точке Z на фиг. 7) возникает вращающий момент Р-г относительно оси поворота в точке О. Остальные выводы аналогичны предыдущим (рассмотренным на фиг. 5 и 6) с той разницей, что ролик на оси в точке В в нашем случае будет оказывать давление на нижнюю боковую продольную поверхность паза направляющей.
Под воздействием усилия руки оператора Р на защелку шатуна 8 в точке А (фиг. 8) возникает крутящий момент Р 1, стремящийся повернуть рычаг относительно оси в точке С. При этом на ось панели в точке О будет действовать сила F, численно равная
FZ-р.1
m
, направленная перпендикулярно
продольной оси шатуна 8 (прямая ОС) и в ту же сторону. Силу F можно разложить на две составляющие: Y, направленную по линии, соединяющей оси в точках О и В на боковой грани панели, и F(i, направленную перпендикулярно F.
Под воздействием силы F ролики н
осях в точках В по обеим боковым граням панели, а значит, и сама панель стремятся переместиться по па- зам направляющих что приводит к вдвижению панели в корпус.
Под воздействием силы F,j панель стремится повернуться вокруг осей в точках В.
Для облегчения вдвижения панели в корпус по пазам направляющих необходимо так расположить оси в точках О и В относительно друг друга в пре
Q
5
0
делах ширины боковой грани в панели, чтобы составляющая Ff была бы максимальна, что достигается при уменьшении угла V.
Для установки панели 5 управления в рабочее положение нажимают на защелку 16, выводя ее из зацепления с выступом 20 корпуса 1, и поворачивают панель 5 до тех пор, пока шатун 8 не придет в соприкосновение с упором 21 корпуса 1, а ролики 15 осей 13 и 14 не займут крайнее нижнее положение в пазах 4 направляющих 2 и 3, при этом касательная к кривой, в форме которой выполнены пазы 4, проведенная через геометрический центр ролика 15, образует с горизонтом угол (величина которого определяется по формуле, указанной выше), в результате чего панель 5 занимает устойчивое положение, обеспечивающее нормальную работу оператора с клавиатурой 6 панели 5. Возвращение панели 5 в исходное положение производят в обратном порядке.
Оснащение радиоэлектронного блока шатунами, шарнирно соединенными с панелью управления и с корпусом, а также выполнение контура пазо1з корпуса в форме кривой линии заданной кривизны позволило повысить удобства его эксплуатации.
Формула изобретения
j/i i+arcsin - ,
где оС - угол уклона панелж управле-ния, град.; Ъ - глубина панели управления, м;
- расстояние междулгеометрическими цеитрами одиого из упоров панели управления и шар- . нира, соединяющего одну из сторон панели управления с планкой соответствующего шаг .туна, м.
Вид В
7 jiuT f Л /
ViM-.
у
а
фиб.З
ви
20
б
/
Фаз. 2
о
/ 8
у
.
Поверхность стола
Фиг. 6
Фиг. 7
| Поляков К.П | |||
| Конструирование приборов и устройств радиоэлектронной аппаратуры, М.: Радио и связь, 1982, с | |||
| Способ получения продукта конденсации бетанафтола с формальдегидом | 1923 |
|
SU131A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для поворота и фиксации | 1980 |
|
SU924929A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
