Изобретение относится к области авиационной техники и может быть использовано при создании летательных аппаратов машущего полета, а также транспорта на воздушной подушке, а также моделей таких устройств и игрушек. В известных конструкциях [1, 2] при движении крыла вверх плоскость крыла не сориентирована по касательной к траектории их планетарного вращения, что увеличивает сопротивление воздуха и снижает эффективность преобразования энергии приводного вала в реактивный импульс воздушного потока.
В известном приводном устройстве лопастей модели махолета [3], являющимся наиболее близким по технической сущности к заявляемому объекту, содержится механизм вращения с приводным валом, механизм формирования траектории движения лопастей при их движении вверх и вниз, а также ползун, причем приводной вал выполнен ступенчатым с изогнутыми концами, к которым на подшипниках прикреплены лопасти, а механизм формирования траектории движения каждой лопасти выполнен в виде качалки с U-образным карманом на конце и продольной прорезью, через которую пропущено колено ступенчатого вала. Напротив кармана в плоскости движения качалки размещена дугообразная направляющая, при этом ползун насажен на колено ступенчатого вала с помощью подшипника и заключен в U-образный карман, на изломе колена ступенчатого вала установлен кольцевой карданный шарнир, одна пара звеньев которого жестко связана с ползуном, а другая пара жестко связана с основанием лопасти.
Недостатком данного приводного устройства является то, что при полном обороте механизма вращения полезная работа совершается за время, составляющее менее половины периода, что ограничивает эффективность устройства.
Задача, на решение которой направлено настоящее изобретение, является увеличение эффективности.
Решение поставленной задачи достигается тем, что в известном приводном устройстве, содержащем крыло, основание, привод крыла с механизмом вращения и механизмом формирования траектории движения крыла при его движении вверх и вниз, крыло выполнено в виде рамы, у которой два первых отрезка, составляющих раму, являются боковыми частями крыла и определяют длину крыла L, два других параллельных друг другу отрезка, составляющих раму, являются соответственно первой осью вращения крыла и второй осью вращения крыла и определяют ширину крыла, при этом концы осей выступают за пределы рамы. Посредине каждой боковой части крыла, размещены по одной втулке привода крыла таким образом, что геометрические оси обеих втулок привода крыла совпадают и параллельны осям вращения крыла. На каждой оси вращения крыла размещены попарно и симметрично концам оси ролики крыла. На всех четырех концах осей вращения крыла размещены по одному ключу оси вращения крыла. Рама крыла покрыта жестким или эластичным материалом.
Механизм вращения состоит из двух узлов вращения. Узлы вращения содержат по одной основной втулке вращения и по одному рычагу переменной длины. Каждая основная втулка вращения подвижно закреплена на своей основной оси, а каждая основная ось одним своим концом жестко закреплена на основании таким образом, что свободные концы основных осей направлены навстречу друг другу, а их геометрические оси совпадают. Между свободными концами основных осей размещается крыло и рычаги переменной длины. Рычаги переменной длины включают по одному основанию рычага, по одному подвижному штоку, по одной направляющей для направления движения подвижных штоков, по одному механизму изменения длины рычага. Основания рычагов переменной длины жестко связаны с соответствующими направляющими для перемещения штоков, а также с соответствующими основными втулками вращения таким образом, что каждый шток расположен перпендикулярно оси основных втулок вращения. На первом конце каждого подвижного штока жестко закреплены по одной оси привода крыла, каждая из которых подвижно связана с соответствующей втулкой привода крыла. На втором конце каждого подвижного штока жестко закреплены по одному ограничителю длины рычага. Каждый механизм изменения длины рычага включает датчик углового положения рычага переменной длины и исполнительный механизм изменения длины рычага. Механизм формирования траектории движения крыла включает два замка оси вращения крыла, ролики оси привода крыла, направляющие роликов крыла и роликов осей привода крыла. Каждый замок оси крыла включает корпус, имеющий отверстие, вал, размещенный в этом отверстии, механизм возвратного вращения вала в исходное положение, который состоит из внутренней пружины замка, упора, лапки вала, жестко соединенной с валом. В одном из торцов вала имеется канавка вала, пересекающая торец вала, при этом с одной стороны канавка вала выходит на боковую поверхность вала. Длина канавки вала меньше диаметра вала, ширина канавки вала равна ширине ключа оси вращения крыла. В корпусе замка имеются первая и вторая канавки корпуса, пересекающие корпус по радиусу от геометрической оси отверстия так, что один конец каждой канавки корпуса выходит внутрь отверстия, другой конец каждой канавки выходит на поверхность корпуса. Расположение канавки вала и канавок корпуса таково, что при нахождении вала в исходном положении (лапка вала прижата к упору) канавка вала и первая канавка корпуса являются продолжением друг друга так, что ключ оси вращения крыла может быть помещен в канавку вала через первую канавку корпуса. При повороте вала относительно исходного положения на заданный угол (180-F) градусов канавка вала и вторая канавка корпуса являются продолжением друг друга, при этом ширина канавки корпуса больше ширины канавки вала на столько, что в интервале углового перемещения вала замка от (180-F) градусов до 180 градусов относительно исходного положения, ключ оси вращения может быть помещен в канавку вала через вторую канавку корпуса или, если ключ уже там находится, он может быть выдвинут из канавки вала через вторую канавку корпуса. Каждый замок оси вращения крыла закреплен подвижно на направляющей замка оси вращения, а направляющие, в свою очередь, жестко закреплены на основании так, что позволяют замку перемещаться по направляющей вверх-вниз на заданное расстояние h, при этом между замком и основанием установлен упругий элемент, который запасает энергию при движении замка вверх. Замки оси вращения крыла размещены на своих направляющих симметрично вертикальной плоскости привода (плоскость, расположенная перпендикулярно оси основных втулок, на равноудаленном расстоянии от основных втулок) таким образом, что стороны замков, имеющие канавки, расположены навстречу друг другу, геометрические оси валов обоих замков совпадают и параллельны геометрической оси основных втулок вращения, а расстояние между геометрической осью валов замков в их крайне нижнем положении и геометрической осью основных втулок вращения составляет заданное значение Q. Расстояние между замками таково, что между ними может разместиться ось вращения крыла, при этом ключи этой оси должны быть размещены в канавках валов замков. Канавки корпусов замков перпендикулярны горизонтальной плоскости привода (плоскость, в которой расположена геометрическая ось валов замков захвата при ее крайне нижнем положении и геометрическая ось основных втулок вращения), а когда замки находятся в крайне нижнем положении, первая канавка замка расположена ниже горизонтальной плоскости привода. Направляющие роликов крыла и роликов оси привода крыла расположены в направлении снизу-вверх симметрично вертикальной плоскости привода.
Ключ оси вращения крыла может быть выполнен в виде прямоугольного параллелепипеда, присоединенного к торцу оси вращения крыла, образуя Т-образную конструкцию.
Ограничитель длины рычага может быть выполнен в виде скобы, выступающей из штока.
Датчик угла поворота рычага переменной длины может быть выполнен с использованием кривошипно-шатунного механизма, преобразующего поворот рычага переменной длины в линейное перемещение ползуна, при этом ось кривошипно-шатунного механизма жестко закреплена на свободной торцевой поверхности основной оси вращения.
Исполнительный механизм содержит пружину рычага и механическую защелку штока. Пружина рычага одним своим концом соединена с подвижным штоком, а вторым своим концом соединены с основанием рычага переменной длины таким образом, что в период рабочего хода крыла, при уменьшении длины рычага, пружина рычага запасает энергию. Механическая защелка штока соединена с ползуном тягой таким образом, что состояния защелки "открыто" или "закрыто" обусловлены фазой вращения рычага переменной длины. Механическая защелка размещена на основании рычага переменной длины таким образом, что в положении "закрыто" защелка взаимодействует с ограничителем длины рычага, фиксируя положение штока относительно основания рычага переменной длины.
Рама крыла может состоять из двух отдельных и равных частей, а обе части крыла соединены друг с другом через два соединительных узла, каждый из которых выполняет роль втулки привода крыла и является одновременно устройством, изменяющим угол между плоскостью первой части крыла и плоскостью второй части крыла в зависимости от фазы вращения крыла.
По периметру крыла могут быть установлены закрылки, которые на двух боковых частях рамы выступают по обе стороны плоскости крыла, а на двух других частях рамы отклонены от плоскости крыла под углом 45 градусов в сторону вращения крыла.
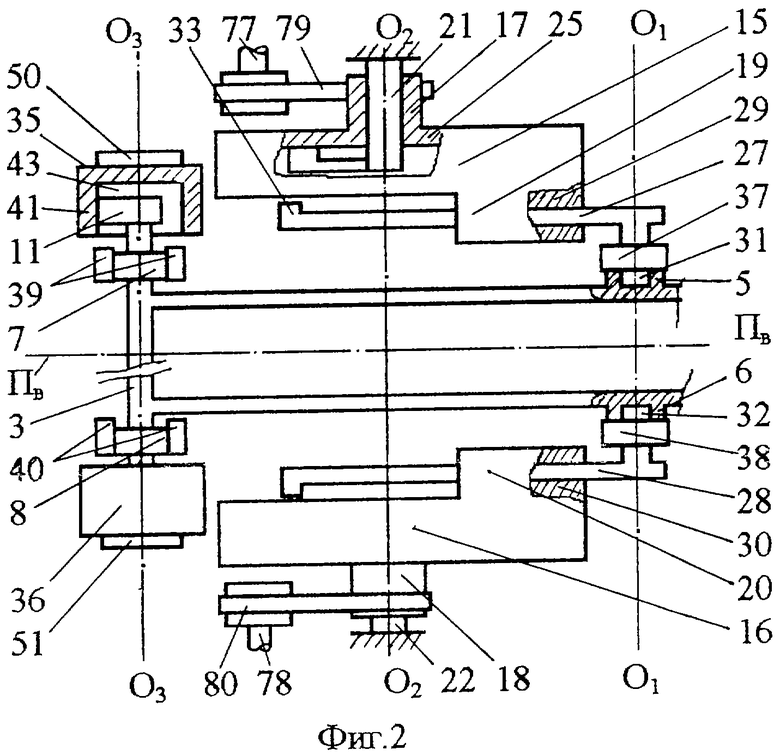
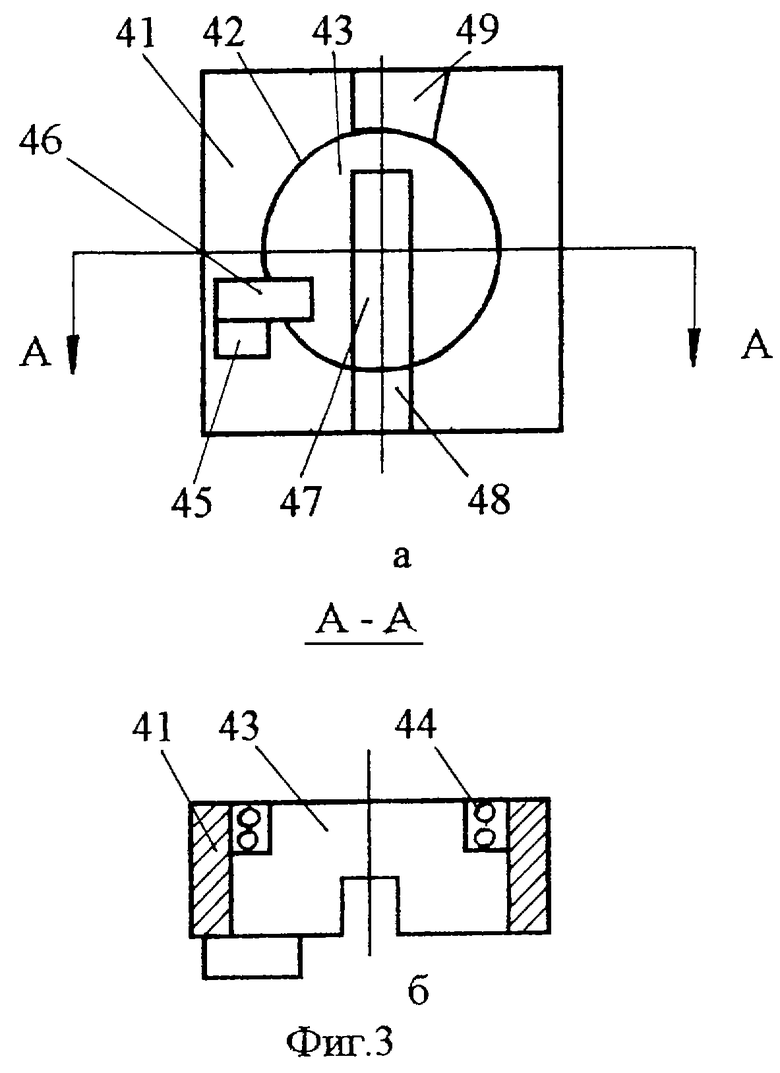
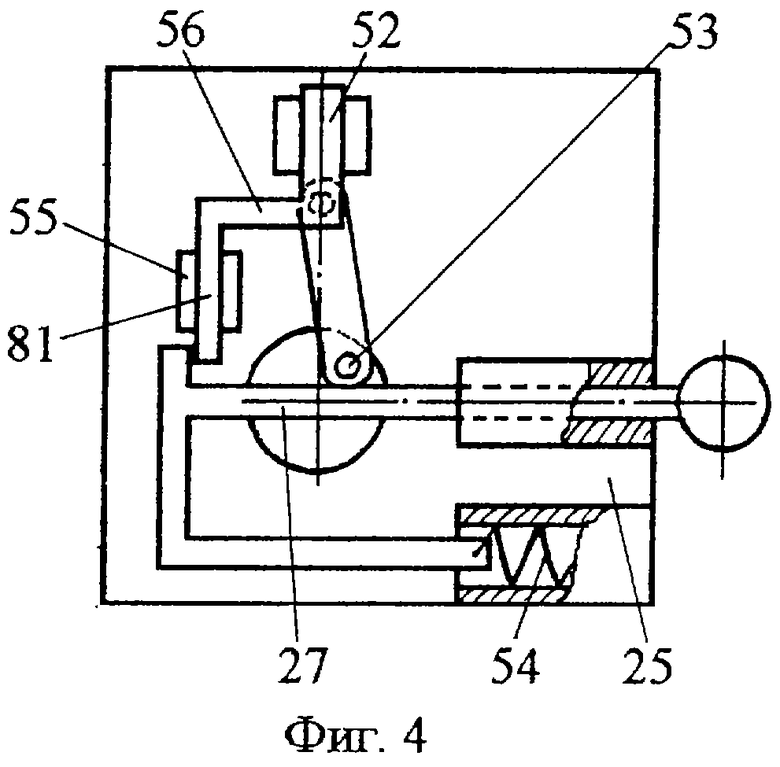
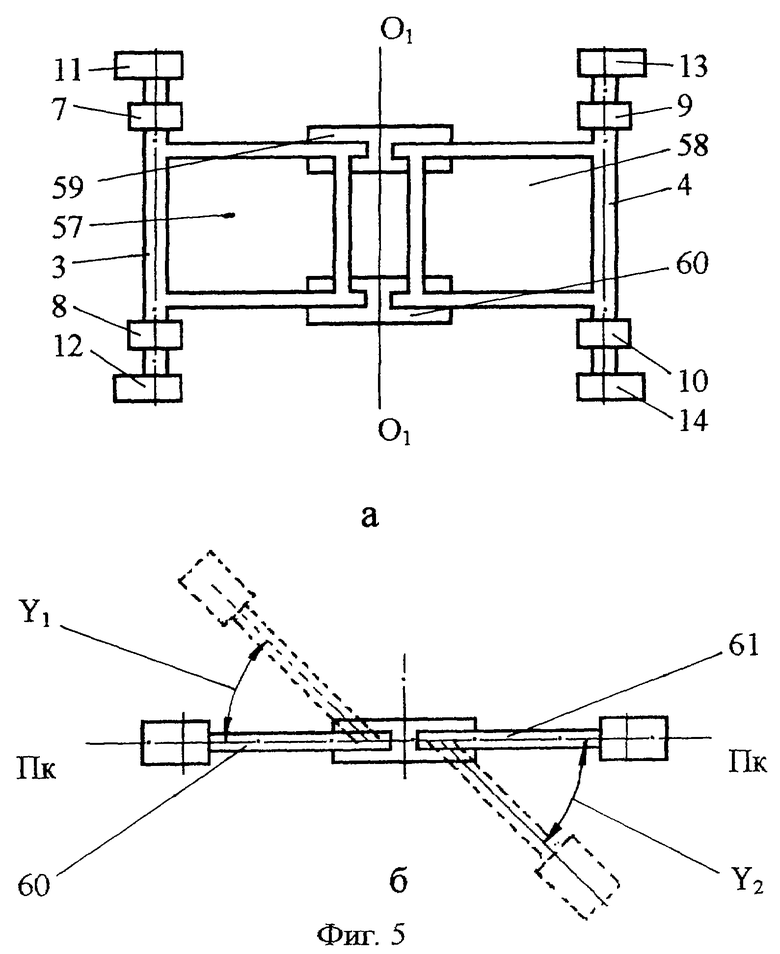
На Фиг. 1 представлен вариант крыла. На Фиг.2 представлен вид узла управления крылом махолета сверху при горизонтальном расположении крыла. На Фиг. 3(а, б) представлен замок захвата оси вращения крыла: а - замок захвата в исходном положении; б - сечение замка захвата, представленного на Фиг.3а. На Фиг.4 представлена конструкция исполнительного механизма изменения длины рычага. На Фиг.5(а, б) представлен вариант крыла: а - вид крыла в плане; б - вид крыла сбоку. На Фиг.6 представлена конструкция соединительного узла крыла. На Фиг.7, 8 показана кинематика движения крыла махолета с простой рамой и составной рамой соответственно.
Крыло выполнено в виде рамы, у которой два первых отрезка 1, 2, составляющих раму, являются боковыми частями крыла и определяют длину крыла L, два других параллельных друг другу отрезка 3, 4, составляющих раму, являются соответственно первой осью вращения крыла и второй осью вращения крыла и определяют ширину крыла. Концы осей выступают за пределы рамы. Посредине каждой боковой части крыла, размещены по одной втулке 5, 6 привода крыла таким образом, что геометрические оси обеих втулок привода крыла совпадают и параллельны осям 3, 4 вращения крыла. На каждой оси вращения крыла размещены попарно и симметрично концам оси ролики 7, 8, 9, 10 крыла. На всех четырех концах осей вращения крыла размещены по одному ключу 11, 12, 13, 14 оси вращения крыла. Рама крыла покрыта жестким или эластичным материалом. Механизм вращения состоит из двух узлов 15, 16 вращения. Узлы вращения содержат по одной основной втулке 17, 18 вращения и по одному рычагу 19, 20 переменной длины. Каждая основная втулка вращения подвижно закреплена на своей основной оси 21, 22. Каждая основная ось одним своим концом жестко закреплена на основании 23 таким образом, что свободные концы основных осей направлены навстречу друг другу, их геометрические оси совпадают, а между свободными концами основных осей размещаются крыло 24 и рычаги переменной длинны. Рычаги переменной длины включают по одному основанию рычага 25, 26, по одному подвижному штоку 27, 28, по одной направляющей 29, 30 для направления движения подвижных штоков, по одному механизму изменения длины рычага. Основания 25, 26 рычагов переменной длины жестко связаны с соответствующими направляющими 29, 30 для перемещения штоков, а также с соответствующими основными втулками 17, 18 вращения таким образом, что каждый шток расположен перпендикулярно оси основных втулок вращения. На первом конце каждого подвижного штока жестко закреплены по одной оси 31, 32 привода крыла, каждая из которых подвижно связана с соответствующей втулкой 5, 6 привода крыла. На втором конце каждого подвижного штока жестко закреплены по одному ограничителю 33, 34 длины рычага.
Каждый механизм изменения длины рычага включает датчик углового положения рычага переменной длины и исполнительный механизм изменения длины рычага. Механизм формирования траектории движения крыла включает два замка 35, 36 оси вращения крыла, ролики 37, 38 оси привода крыла, направляющие 39, 40 роликов крыла и роликов осей привода крыла. Каждый замок оси крыла включает корпус 41, имеющий отверстие 42, вал 43, размещенный в этом отверстии, механизм возвратного вращения вала в исходное положение, который состоит из внутренней пружины 44 замка, упора 45, лапки 46 вала, жестко соединенной с валом. В одном из торцов вала имеется канавка 47 вала, пересекающая торец вала, при этом с одной стороны канавка вала выходит на боковую поверхность вала. Длина канавки вала меньше диаметра вала, а ширина канавки вала равна ширине ключа оси вращения крыла. В корпусе замка имеются первая и вторая канавки 48, 49 корпуса, пересекающие корпус по радиусу от геометрической оси отверстия так, что один конец каждой канавки корпуса выходит внутрь отверстия, другой конец каждой канавки выходит на поверхность корпуса. Расположение канавки вала и канавок корпуса таково, что при нахождении вала в исходном положении (лапка вала прижата к упору) канавка вала и первая канавка корпуса являются продолжением друг друга так, что ключ оси вращения крыла может быть помещен в канавку вала через первую канавку корпуса. При повороте вала относительно исходного положения на заданный угол (180-F) градусов канавка вала и вторая канавка корпуса являются продолжением друг друга, при этом ширина канавки корпуса больше ширины канавки вала на столько, что в интервале углового перемещения вала замка от (180-F) градусов до 180 градусов относительно исходного положения, ключ оси вращения может быть помещен в канавку вала через вторую канавку корпуса или, если ключ уже там находится, он может быть выдвинут из канавки вала через вторую канавку корпуса. Каждый замок оси вращения крыла закреплен подвижно на направляющей 50, 51 замка оси вращения. Направляющие, в свою очередь, жестко закреплены на основании так, что позволяют замку перемещаться по направляющей вверх-вниз на заданное расстояние h, при этом между замком и основанием установлен упругий элемент, который запасает энергию при движении замка вверх. Замки оси вращения крыла размещены на своих направляющих симметрично вертикальной плоскости (Пв-Пв) привода (плоскость, расположенная перпендикулярно оси основных втулок, на равноудаленном расстоянии от основных втулок) таким образом, что стороны замков, имеющие канавки, расположены навстречу друг другу, геометрические оси валов обоих замков совпадают и параллельны геометрической оси основных втулок вращения, а расстояние между геометрической осью валов замков в их крайне нижнем положении и геометрической осью основных втулок вращения составляет заданное значение Q. Расстояние между замками таково, что между ними может разместиться ось вращения крыла, при этом ключи этой оси должны быть размещены в канавках валов замков. Канавки корпусов замков перпендикулярны горизонтальной плоскости (Пг-Пг) привода (плоскость, в которой расположена геометрическая ось валов замков захвата при ее крайне нижнем положении и геометрическая ось основных втулок вращения), а когда замки находятся в крайне нижнем положении, первая канавка замка расположена ниже горизонтальной плоскости привода. Направляющие 39, 40 роликов крыла и роликов оси привода крыла расположены в направлении снизу-вверх симметрично вертикальной плоскости привода.
Ключ оси вращения крыла может быть выполнен в виде прямоугольного параллелепипеда, присоединенного к торцу оси вращения крыла, образуя Т-образную конструкцию.
Ограничитель длины рычага может быть выполнен, например, в виде скобы, выступающей из штока.
Датчик угла поворота рычага переменной длины может быть выполнен с использованием кривошипно-шатунного механизма, преобразующего поворот рычага переменной длины в линейное перемещение ползуна 52. Ось 53 кривошипно-шатунного механизма, в этом случае, жестко закреплена на свободной торцевой поверхности основной оси вращения.
Исполнительный механизм может содержать пружину 54 рычага и механическую защелку 55 штока. Пружина рычага одним своим концом соединена с подвижным штоком 27, а вторым своим концом соединены с основанием рычага переменной длины таким образом, что в период рабочего хода крыла, при уменьшении длины рычага, пружина рычага запасает энергию. Механическая защелка штока соединена с ползуном тягой 56 таким образом, что состояния защелки "открыто" или "закрыто" обусловлены фазой вращения рычага переменной длины. Механическая защелка размещена на основании рычага переменной длины таким образом, что в положении "закрыто" защелка взаимодействует с ограничителем длины рычага, фиксируя положение штока относительно основания рычага переменной длины.
Рама крыла может состоять из двух отдельных и равных частей 57, 58, а обе части крыла соединены друг с другом через два соединительных узла 59, 60, каждый из которых выполняет роль втулки привода крыла и является одновременно устройством, изменяющим угол между плоскостью первой части крыла и плоскостью второй части крыла в зависимости от фазы вращения крыла.
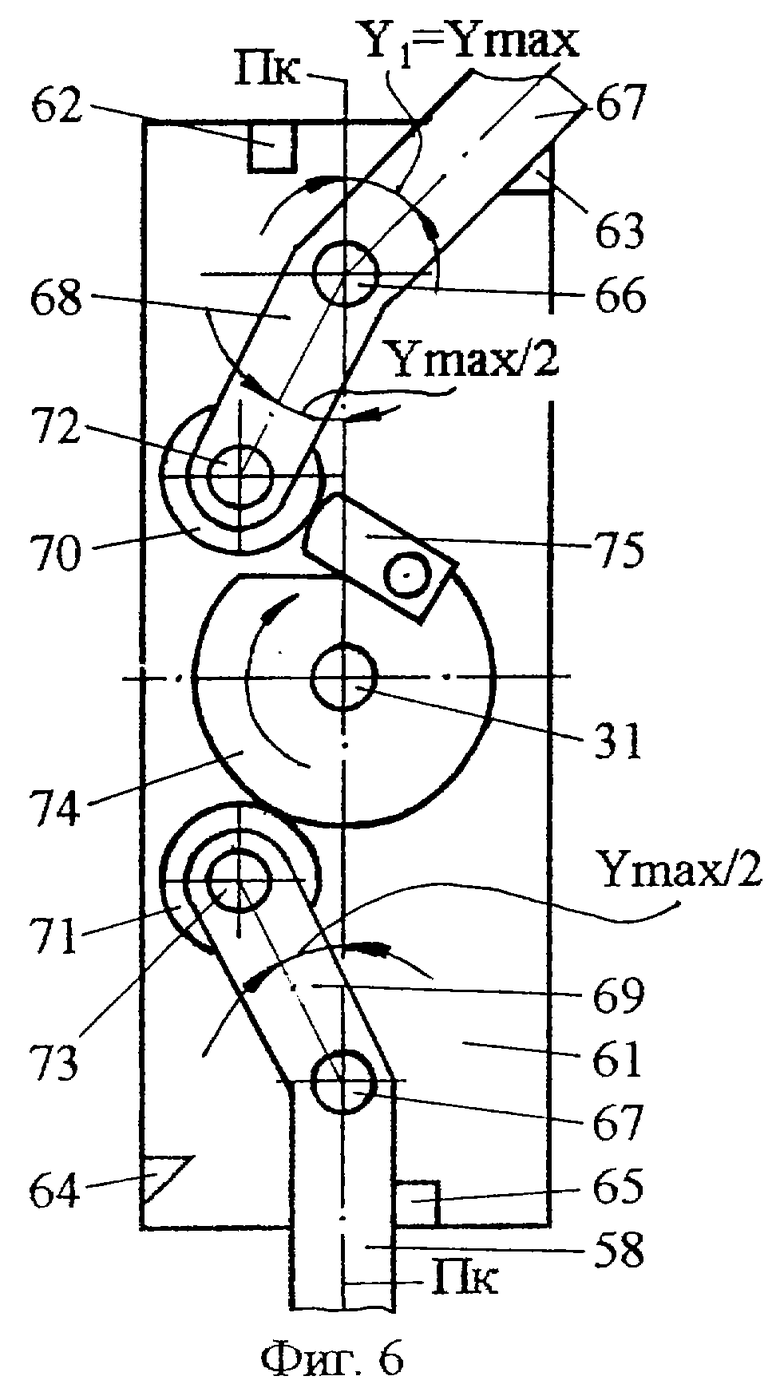
Каждый соединительный узел может включать корпус 61 соединительного узла, редуктор соединительного узла, упоры 62, 63, 64, 65 соединительного узла, которые обеспечивают изменение углов Y1 и Y2 (Y1 - угол между плоскостью первой части 57 крыла и основной плоскостью (Пк-Пк) крыла; Y2 - угол между плоскостью второй части 58 крыла и основной плоскостью (Пк-Пк) крыла) от нуля до заданного значения Ymax и от Ymax до нуля в зависимости от угла W поворота оси привода крыла относительно корпуса соединительного узла, при этом за основную плоскость крыла принимается плоскость, в которой расположены обе части крыла, когда угол между ними составляет 180 градусов.
Редуктор соединительного узла включает внутреннюю ось 66 первой части крыла, которая жестко соединена с первой частью крыла, внутреннюю ось 67 второй части крыла, которая жестко соединена с второй частью крыла, первый и второй кронштейны 68, 69, первый внутренний и второй внутренний ролики 70, 71 радиусом Rв, оси 72, 73 внутренних роликов, датчик 74 угла поворота оси привода крыла относительно корпуса соединительного узла. Внутренняя ось первой части крыла и внутренняя ось второй части крыла размещены в корпусе соединительного узла таким образом, что эти оси расположены в основной плоскости крыла, параллельно оси привода крыла, симметрично относительно оси привода крыла, на расстоянии N от оси привода крыла. Первый кронштейн жестко связан с внутренней осью первой части крыла и осью первого ролика таким образом, что ось первого ролика расположена параллельно внутренней оси первой части крыла, на расстоянии G от внутренней оси первой части крыла, а когда угол Y1 составляет (Ymax)/2, ось первого ролика находится в основной плоскости крыла между внутренней осью первой части крыла и осью привода крыла. Второй кронштейн жестко связан с внутренней осью второй части крыла и осью второго ролика таким образом, что ось второго ролика расположена параллельно внутренней оси второй части крыла, на расстоянии G от внутренней оси второй части крыла, а когда угол Y2 составляет (Ymax)/2, ось второго ролика находится в основной плоскости между внутренней осью второй части крыла и осью привода крыла. Датчик угла W поворота оси привода крыла относительно корпуса соединительного узла, выполнен в виде диска радиусом Rd жестко закрепленного на оси привода крыла. Часть диска (сегмент) выполнена в виде единичного храпового элемента 75, позволяющего при его поочередном взаимодействии с роликами редуктора, например с первым роликом, свободное вращение первой части крыла, из положения, когда Y1=0 в положение, когда Y1=Ymax, и препятствующего свободному вращению оси первой части крыла в противоположном направлении. Угловое положение храпового элемента на датчике устанавливается таким, что после поворота датчика на заданный угол W1 первый ролик приходит в соприкосновение с той частью храпового элемента, которая "позволяет" свободное вращение первой части крыла, при этом за нулевое положение датчика принимается положение, при котором Y1=Y2=0, основная плоскость крыла перпендикулярна основной плоскости привода, а первая часть крыла находится выше основной плоскости привода. Угол W1 выбирается из интервала значений W: от значения
W= 0 до W=arctg(L/2Q)); параметры Ymax, Rв, Rd, N, G связаны между собой соотношениями:
N<(Rв+Rd+G); dW=0,5•АrсSin((RB/Rd)•Sin(Ymax/2)), где
dW - величина (в дуговых единицах) изменения углового положения оси привода крыла относительно корпуса соединительного узла, за которое происходит изменение угла Y1 от значения Y1=Ymax до Y1=0 (изменение угла Y2 от значения Y2=Ymax до нуля) в процессе маха крыла.
На первой и второй частях крыла имеются отбойники, выполненные, например, в виде выступов на раме каждой части крыла, а на основании имеются упоры, которые устанавливаются таким образом, что при движении крыла по направляющим вверх и достижении при этом осью привода угла W1 относительно корпуса соединительного элемента упоры основания начинают взаимодействие с отбойниками, установленными на первой (второй) части крыла, отклоняя первую (вторую) часть крыла на угол Y1(Y2)>0. По периметру крыла могут быть установлены закрылки, которые на двух боковых частях рамы выступают по обе стороны плоскости крыла, а на двух других частях рамы отклонены от плоскости крыла под углом 45 градусов в сторону вращения крыла.
Механизм вращения работает следующим образом.
Вращение от двигателя 74 передается с помощью приводных валов 75, 76 и двух передач 77, 78 втулкам вращения 17, 18, которые являются составными частями узлов вращения и жестко связаны с рычагами переменной длины 19, 20, что и обеспечивает вращение рычагов переменной длины относительно осей 21 и 22 соответственно.
Работа рычага переменной длины с исполнительным механизмом изменения длины рычага осуществляется следующим образом.
При достижении рычагом переменной длины в процессе вращения заданного углового положения, выдвигающийся ригель 79 защелки 53, взаимодействуя с ограничителем 33 длины рычага, ограничивает выдвижение подвижного штока 27, что и ограничивает длину рычага. При достижении рычагом переменной длины другого заданного углового положения механическая защелка открывается, освобождая шток, а пружина 52 рычага обеспечивает выталкивание штока, что и приводит к увеличению длины рычага.
Замок оси вращения крыла работает следующим образом.
При перемещении крыла снизу-вверх ключ, расположенный на той оси вращения крыла, которая приближается к замкам оси вращения крыла снизу, проходя через нижнюю канавку в корпусе замка, входит в канавку вала. При повороте оси вращения крыла поворачивается также и вал замка, фиксируя при этом ключ в вале. Освобождение ключа (а значит и оси вращения крыла) теперь будет возможным только при повороте вала замка на (180-F) градусов относительно исходного положения и движения ключа вверх через верхнюю канавку корпуса замка. При выходе ключа из замка вал под действием внутренней пружины замка поворачивается в исходное положение делая, таким образом, замок снова готовым к работе.
Полностью весь узел управления крылом махолета с несоставной рамой крыла работает следующим образом.
Вращение от двигателя 74 передается с помощью приводных валов 75, 76 и двух передач 77, 78 втулкам вращения 17, 18, которые являются составными частями узлов вращения и жестко связаны с рычагами переменной длины 19, 20, что и обеспечивает вращение рычагов переменной длины относительно осей 21 и 22 соответственно. Энергия вращения от рычагов переменной длины через оси привода крыла преобразуется в энергию перемещения крыла по своей траектории.
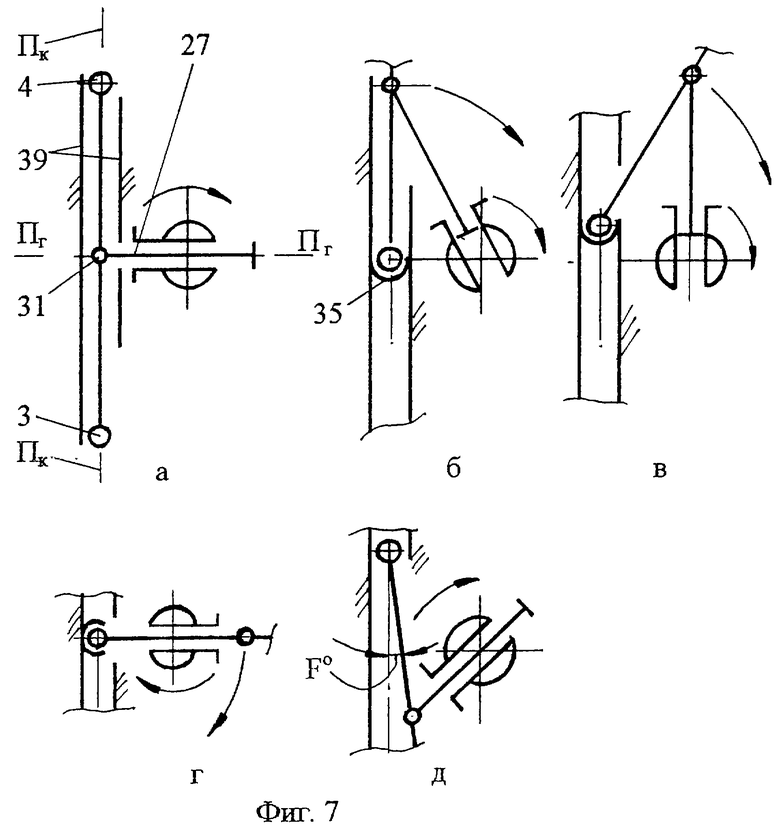
Полный период перемещения крыла, иллюстрируемый Фиг.7а-Фиг.7д, можно разделить на десять этапов. Так как на Фиг.7а-Фиг.7д схема работы узла управления крылом махолета показана при положении крыла в профиль, то в схеме указан только один узел вращения, один замок, одна направляющая для роликов, имея в виду, что сказанное полностью относится и ко второму узлу вращения, второму замку, второй направляющей роликов.
Исходное положение крыла и других элементов узла управления крылом махолета представлены на Фиг.7а.
На первом этапе (с момента, представленного на Фиг.7а, до момента, представленного на Фиг.7б) осуществляется отключение защелки механизма изменения длины рычага и пружина рычага выталкивает шток 27, что совместно с вращением рычага переменной длины осуществляет перемещение крыла по направляющим 39 вверх. В конце перемещения крыла из исходного положения (Фиг. 7а) в положение, показанное на Фиг.7б, ключи, размещенные на первой оси 3, входят каждый в свой замок 35, а длина рычага переменной длины достигает своего максимального значения.
Во время второго этапа (с момента, представленного на Фиг.7б, до момента, представленного на Фиг.7в) замки под действием инерционных сил движения крыла и сил вращения рычага переменной длины вместе с находящимися в них ключами начинают движение по своим направляющим вверх, при этом вследствие ограниченной длины рычагов переменной длины, а также вследствие вращения этих рычагов крыло начинает поворачиваться относительно своей первой оси. Поворот оси 3 вызывает поворот валов внутри замков, что и обеспечивает фиксацию ключей оси вращения в замках. Торможение замков при их движении вверх осуществляется за счет внешних пружин замков, установленных между замками и основанием, а также за счет аэродинамического сопротивления воздуха крылу при его вращательном движении. Максимальное продвижение замков вверх по своим направляющим возможно на заданное расстоянием h и ограниченно упорами.
Во время третьего этапа (Фиг.7в-Фиг.7г) продолжает осуществляться вращение крыла относительно оси 3, ключи которой захвачены замками. Одновременно замки из своего верхнего положения опускаются в исходное нижнее положение. Это происходит под воздействием внешних пружин замков, а также вследствие того, что реакция воздушного потока на крыло на участке от первой оси 3 до оси 31 привода крыла будет меньше, чем реакция воздушного потока на крыло на участке от оси 31 привода крыла до второй оси 4 вращения крыла из-за разницы линейных скоростей этих участков крыла.
Во время четвертого этапа (Фиг.7г-Фиг.7д) продолжается вращение крыла вокруг своей первой оси 3; одновременно срабатывает защелка, ограничивающая выдвижение подвижного штока, что препятствует увеличению длины рычага. Ограничение длины рычага и продолжающееся вращение рычага приводит к выталкиванию первой оси крыла вместе с замками, в которых эта ось находится, вверх. Замки при этом движутся по своим направляющим. Одновременно продолжается вращение ключей, расположенных в замках, что приводит к вращению валов замков.
Во время пятого этапа, который начинается при повороте валов в замках на заданный угол, равный (180-F) градусов (Фиг.7д), появляется возможность выхода ключей, размешенных на первой оси 3 крыла, из замков вверх, а вращение рычага обеспечивает подъем крыла вверх по направляющей 39. Освобожденные замки под действием внешних пружин замков возвращаются в свое исходное, самое низкое, положение. В конце пятого этапа положение элементов узла управления крылом махолета будет подобное тому, что показано на Фиг.7а, с тем отличием, что первая ось 3 и вторая ось 4 поменяются местами. Далее процесс повторяется с тем отличием, что осью, вокруг которой осуществляется вращение крыла, является вторая ось 4. Таким образом полному периоду перемещения крыла, когда должна повториться позиция, приведенная на Фиг.7а, соответствуют два полных оборота основной втулки вращения.
Соединительный узел крыла с составной рамой работает следующим образом. В зависимости от углового положения датчика 72 относительно корпуса 59 соединительного узла соединительный узел обеспечивает заданное угловое положение первой и второй частей 55, 56 крыла относительно основной плоскости (Пк-Пк) крыла.
Если принять за нулевое угловое положение (W=0) датчика положение, когда Y1= Y2= 0, основная плоскость крыла перпендикулярна горизонтальной плоскости привода, а первая часть крыла находится выше основной плоскости привода (Фиг. 8а), тогда при изменении угла W oт W=0 дo W=arctg(L/2Q) расположение элементов соединительного узла будет таким, как показано на Фиг.6. В этом случае угол Y1 между первой частью крыла и основной плоскостью крыла равен Ymax, так как вращение первой части 55 крыла в одну сторону заблокировано упором 61, а вращение в другую сторону заблокировано взаимодействием ролика 68 и храпового элемента 73. Вращение второй части 56 крыла в одну сторону заблокировано упором 63, а вращение в другую сторону заблокировано взаимодействием ролика 69 и датчика 72. Уменьшение угла Y1 от Ymax до нуля возможно только при вращении датчика 72 с храповым элементом 73 относительно корпуса 59. В этом случае по мере вращения датчика 72 по часовой стрелке, как показано на Фиг.6, у кронштейна 66 с роликом 68 появляется возможность вращения на оси 64 против часовой стрелки, что и обуславливает уменьшение угла Y1. При повороте датчика 72 относительно корпуса 59 на угол
dW=0,5•АrсSin((Rв/Rd)•Sin(Ymax/2)), ролик 68 переместится в крайне правое положение, а угол Y1 соответственно уменьшится до нуля. При дальнейшем вращении датчика до значения W=180 градусов обе части 55, 56 крыла будут находится в основной плоскости крыла так как вращение первой части 55 крыла в одну сторону будет заблокировано упором 60, а вращение в другую сторону заблокировано взаимодействием ролика 68 и датчика 72. Вращение второй части 56 крыла, по-прежнему, в одну сторону будет заблокировано упором 63, а вращение в другую сторону заблокировано взаимодействием ролика 69 и датчика 72. При повороте датчика 72 на угол W=180 градусов относительно положения, представленного на Фиг.6, повторяется ситуация, представленная на Фиг.6, с тем отличием, что первая и вторая части крыла поменяются местами.
Полностью узел управления крылом махолета с составной рамой крыла работает следующим образом.
Вращение от двигателя 74 передается с помощью приводных валов 75, 76 и двух передач 77, 78 втулкам вращения 17, 18, которые являются составными частями узлов вращения и жестко связаны с рычагами переменной длины 19, 20, что и обеспечивает вращение рычагов переменной длины относительно осей 21 и 22 соответственно. Энергия вращения от рычагов переменной длины через оси привода крыла преобразуется в энергию перемещения крыла по своей траектории.
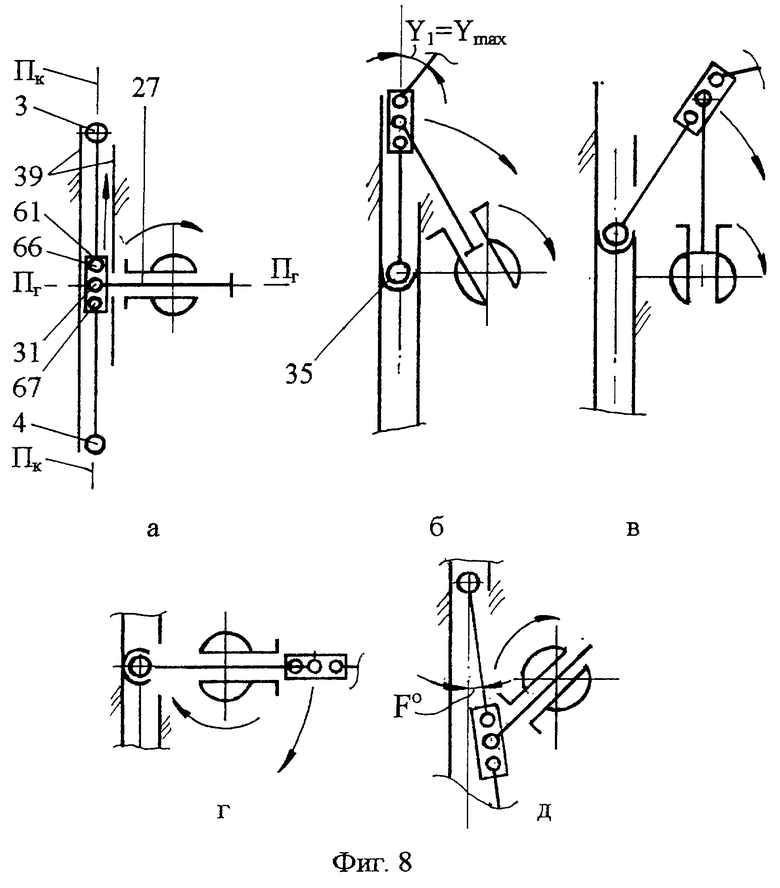
Полный период перемещения крыла, иллюстрируемый Фиг.8а-Фиг.8д, можно разделить на десять этапов. Так как на Фиг.8а-Фиг.8д схема работы узла управления крылом показана при положении крыла в профиль, то в схеме указан только один узел вращения, один замок, одна направляющая для роликов, имея в виду, что сказанное полностью относится и ко второму узлу вращения, второму замку, второй направляющей роликов.
Исходное положение крыла и других элементов узла управления крылом представлены на Фиг.8а, при этом за нулевое угловое положение (W=0) датчика 72 относительно корпуса 59 соединительного узла принимается положение, когда Y1= Y2= 0, основная плоскость крыла перпендикулярна горизонтальной плоскости привода, а первая часть крыла находится выше основной плоскости привода.
На первом этапе (с момента, представленного на Фиг.8а, до момента, представленного на Фиг.8б) осуществляется отключение защелки механизма изменения длины рычага и пружина рычага выталкивает шток 27, что совместно с вращением рычага переменной длины осуществляет перемещение крыла по направляющей 39 вверх.
В процессе перемещения крыла из исходного положения (Фиг.8а) вверх угол W между осью привода и корпусом соединительного узла достигает заданного значения W1. В этот момент храповой элемент, закрепленный на датчике, придвинется к ролику 68 той своей стороной, которая "разрешает" перемещение ролика 68 из положения, которое соответствует Y1=0 в положение, когда Y1= Ymax, одновременно отбойники, расположенные на первой части крыла, начнут взаимодействие с упорами, закрепленными на основании, заставляя первую часть крыла изменять угол Y1, а набегающий поток воздуха осуществит изменение Y1 до значения Y1=Ymax. В конце перемещения крыла из исходного положения Фиг.8а в положение, показанное на Фиг. 8б, ключи, размещенные на второй оси 4, входят каждый в свой замок 35, а длина рычага переменной длины достигает своего максимального значения. Этому положению крыла, представленному на Фиг. 8б, соответствует расположение элементов соединительного узла, представленное на Фиг.6, и угол W=W2.
На втором этапе (с момента, представленного на Фиг.8б, до момента, представленного на Фиг.8в) замки, вместе с находящимися в них ключами начинают движение по своим направляющим вверх, при этом вследствие ограниченной длины рычагов переменной длины, а также вследствие вращения этих рычагов крыло начинает поворачиваться относительно своей оси 4, находящейся в замках. Поворот оси 4 вызывает поворот валов внутри замков, что и обеспечивает фиксацию ключей оси вращения в замках. Торможение замков при их движении вверх осуществляется за счет пружин, установленных между замками и основанием, а также за счет аэродинамического сопротивления воздуха крылу при его вращательном движении.
Во время третьего этапа (Фиг.8в-Фиг.8г) продолжает осуществляться вращение крыла относительно второй оси 4, ключи которой захвачены замками. Одновременно замки из своего верхнего положения опускаются в исходное нижнее положение. Это происходит под воздействием внешних пружин замков, а также вследствие того, что реакция воздушного потока на крыло на участке от первой оси 3 до оси 31 привода крыла будет больше, чем реакция воздушного потока на крыло на участке от оси 31 привода крыла до второй оси 4 вращения крыла из-за разницы линейных скоростей этих участков крыла. Одновременно в процессе вращения давление воздуха на крыло стремится вернуть первую часть крыла из состояния с Y1=Ymax в состояние, когда Y1=0, однако этому препятствует храповой элемент. Возвращение первой части крыла в положение, соответствующее Y1=0, осуществляется постепенно, по мере вращения датчика 72 с храповым элементом 73 и заканчивается тогда, когда датчик повернется относительно нулевого положения на угол W3;
W3 = W2 + dW,
где dW - величина (в дуговых единицах) изменения углового положения оси привода крыла относительно корпуса соединительного узла, за которое происходит изменение угла Y1 от значения Y1=Ymax до Y1=0 (изменение угла Y2 от значения Y3=Ymах до нуля) в процессе маха крыла;
dW=0,5•ArcSin((RB/Rd)•Sin(Ymax/2)).
Во время четвертого этапа (Фиг.8г-Фиг.8д) продолжается вращение крыла вокруг своей второй оси 4, при этом углы Y1=Y2=0, одновременно срабатывает защелка, ограничивающая выдвижение подвижного штока, что препятствует увеличению длины рычага. Ограничение длины рычага и продолжающееся вращения рычага приводит к выталкиванию второй оси крыла вместе с замками, в которых эта ось находится, вверх. Замки при этом движутся по своим направляющим. Одновременно продолжается вращение ключей, расположенных в замках, что приводит к вращению валов замков.
Во время пятого этапа, который начинается при повороте валов в замках на заданный угол, равный (180-F) градусов (Фиг.8д), появляется возможность выхода ключей, размешенных на второй оси 4 крыла, из замков вверх, а вращение рычага обеспечивает подъем крыла вверх по направляющей 39. Освобожденные замки под действием внешних пружин замков возвращаются в свое исходное, самое низкое, положение. В конце пятого этапа положение элементов устройства будет подобное тому, что показано на Фиг.8а, с тем отличием, что первая ось 3 и вторая ось 4 поменяются местами. Далее процесс повторяется с тем отличием, что осью, вокруг которой осуществляется вращение крыла, является первая ось 3. Таким образом полному периоду перемещения крыла, когда должна повториться позиция, приведенная на Фиг.8а, соответствуют два полных оборота основной втулки вращения.
Из описания предлагаемого устройства следует, что активный участок периода перемещения крыла по траектории вверх-вниз составляет более 240 градусов, что выгодно отличает предлагаемое устройство от существующих решений. Кроме того, предлагаемая схема перемещения крыла почти полностью устраняет возвратно-поступательное движение крыла, что уменьшает положительные и отрицательные ускорения крыла и его элементов, что в свою очередь делает возможным изготовление деталей менее массивными, более легкими, что и приводит к увеличению эффективности работы всего устройства в целом. Использование составного крыла увеличивает полезную составляющую реактивного импульса воздушного потока, созданного крылом. Реализация предлагаемого технического решения позволит получить действующие образцы летательных аппаратов машущего полета, обладающие преимущественными характеристиками по сравнению с известными техническими решениями, что и обуславливает экономическую целесообразность использования предлагаемого изобретения.
Используемые источники:
1. Авторское свидетельство СССР 1818275, кл. В 64 С 33/02, заявл. 17.12.90, опубл. 30.05.93. Бюл. 20.
2. Авторское свидетельство СССР 1121182, кл. В 64 С 33/02, заявл. 27.12.78, опубл. 30.10.84. Бюл. 40.
3. Авторское свидетельство СССР 1728086, кл. В 64 С 33/02, А 63, Н 27/00 заявл. 12.01.87, опубл. 23.04.92. Бюл. 15.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУСКУЛЬНЫЙ ПЛАВАЮЩИЙ МАХОЛЕТ "ЛЕБЕДУШКА" | 2004 |
|
RU2304546C2 |
| УПРАВЛЯЕМОЕ КРЫЛО ПРОПЕЛЛЕРНОГО ТИПА | 2015 |
|
RU2583426C1 |
| УПРУГО ИЗГИБАЮЩЕЕСЯ КРЫЛО МАХОЛЕТА И МАХОЛЕТ | 2015 |
|
RU2615030C2 |
| УНИВЕРСАЛЬНЫЙ ПРИВОД МАХОЛЕТА | 2007 |
|
RU2349507C2 |
| Махолет | 2017 |
|
RU2655582C1 |
| МАХОЛЕТ СО СБАЛАНСИРОВАННЫМИ КРЫЛЬЯМИ | 1999 |
|
RU2156209C1 |
| МАХОЛЕТ | 2001 |
|
RU2222476C2 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
| МАХОЛЕТ | 1995 |
|
RU2081033C1 |
| МАХОЛЕТ | 1993 |
|
RU2063367C1 |
Изобретение относится к области авиационной техники. Узел управления включает основание, привод крыла, которое выполнено в виде рамы, у которой посередине каждой из ее боковых частей размещены по одной втулке привода крыла, а геометрические оси обеих втулок привода крыла совпадают. Две другие части рамы параллельны осям втулок вращения и являются осями вращения крыла. На концах осей размещены по одному ключу оси крыла. Рама покрыта материалом. Привод включает два замка оси крыла, направляющие крыла и два узла вращения, каждый из которых содержит основную втулку вращения и рычаг переменной длины, связанный жестко с соответствующей основной втулкой вращения. Каждая основная втулка вращения подвижно закреплена на своей оси так, что их геометрические оси совпадают, а между свободными концами основных осей размещены крыло и рычаги переменной длины. На свободных концах рычагов имеются оси привода крыла, которые связаны подвижно с соответствующими втулками привода крыла. Рама крыла выполнена составной так, что по бокам рамы могут быть установлены закрылки. Изобретение направлено на увеличение эффективности работы узла управления крылом махолета. 6 з.п.ф-лы, 8 ил.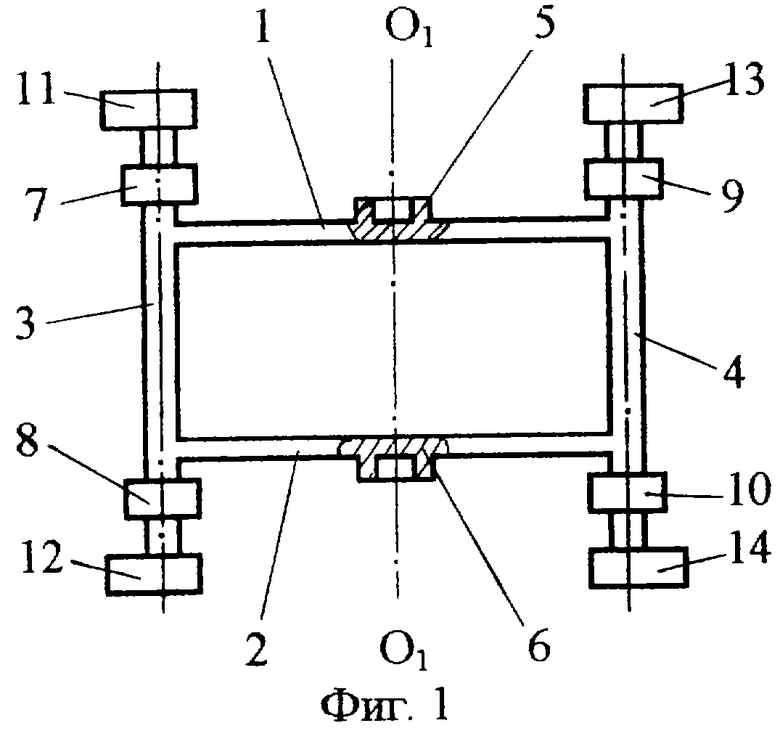
| SU 1728086 А, 23.04.1992 | |||
| US 3111928 А, 26.11.1963 | |||
| US 1450480 А, 03.04.1923. |

