(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1983 |
|
SU1161378A1 |
| МАНИПУЛЯТОР | 2002 |
|
RU2228259C2 |
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| Устройство для шаговой подачи заготовок в зону обработки | 1984 |
|
SU1346306A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| ПЕРЕГРУЖАТЕЛЬ | 1991 |
|
RU2009969C1 |
| Автомат для изготовления сборных изделий | 1978 |
|
SU753583A1 |
| Плоскошлифовальный автоматический комплекс для двусторонней обработки деталей | 1988 |
|
SU1657372A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ГОРЯЧЕЙ ОБЪЕМНОЙ ШТАМПОВКИ ПРЕИМУЩЕСТВЕННО ЗВЕНЬЕВ ГУСЕНИЧНОЙ ЦЕПИ | 1992 |
|
RU2035254C1 |
| СТАНОК ДЛЯ СВЕРЛЕНИЯ | 2006 |
|
RU2309822C1 |
Изобретение относится к робототехнике и может быть использовано для оснащения роботокомплексов прессования пластмассовых изделий. Цель изобретения - расширение функциональных возможностей и повышение производительности труда за счет выполнения дополнительной функции ориентирования изделий во время захватывания-отпускания заготовок. Устройство содержит корпус, на котором размещены на параллельных валах захватные элементы заготовки и привод перемещения. На корпусе на поворотных основаниях, имеющих пазы, установлены захватные элементы готового изделия. Валы соединены кривошипно-шатунными механизмами, шатуны которых имеют упоры, вставленные верхним концом в пазы оснований. При захватывании-отпускании заготовки шатуны смещаются, и упоры, воздействуя на основания, поворачивают их. Кривошипно-шатунные механизмы можно смещать вдоль валов, меняя угол поворота. Перемещая по шатуну упор можно менять упорный угол ориентации. 3 ил.
Изобретение относится к робототехнике, а именно к конструкциям захватных устройств манипуляторов и других грузозахватных устройств, и может быть использовано для транспортирования заготовок и готовых изделий между накопителями, прессом и обрабатывающим устройством.
Цель изобретения - расширение функциональных возможностей и повышение производительности.
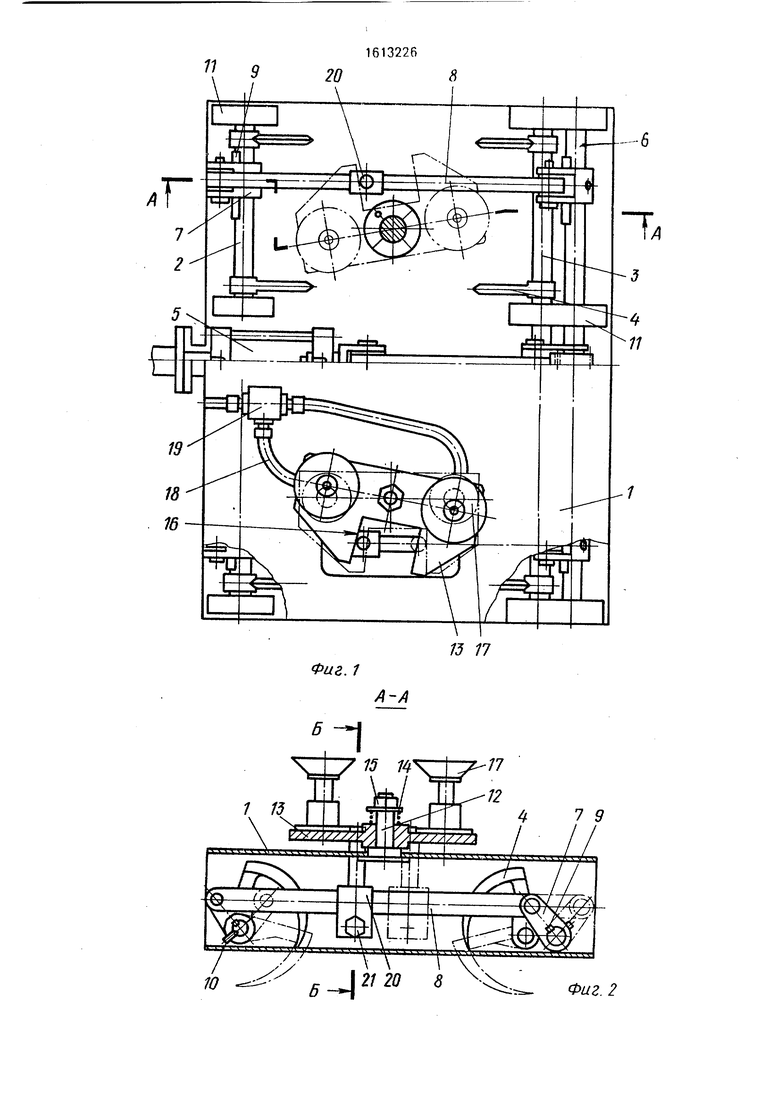
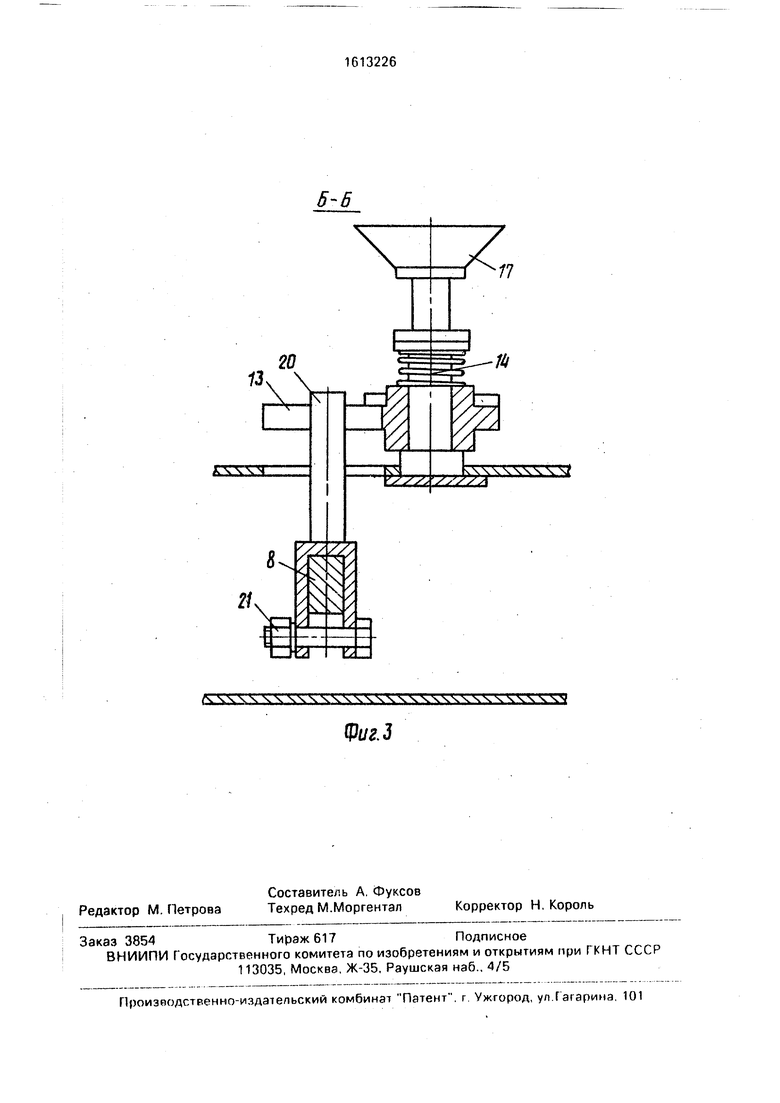
На фиг. 1 изображено захватное устройство, виды снизу и сверху; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б
на фиг. 2.
Захватное устройство содержит корпус 1, на нижней стороне которого на валах 2 и 3 установлены захватные элементы 4 заготовки, выполненные в виде крючков, изогнутых по окружности с центром, лежа1..им на оси вращения. Вращение на валы 2 и 3 передается от пневмопривода 5 через ведущий вал 6. Вал 3 связьн с ведущим валом 6 шестерни, а валы 2 -через криво- шипно-рычажные механизмы, состоящие из кривошипов 7, соединенных шатунами 8. Кривошипы 7 соединены с валами 2 и 6 с помощью длинных шпонок 9, по которым они могут скользить вдоль соответствующих валов 2 и 6 и фиксироваться винтами 10 в заданном положении. Валы 2, 3 и 6 усгаиов- лены в опорах 11. На верхней стороне корпуса 1 на оси 12 установленго поворотное основание 13, поджатое к уступу оси 12 рез пружину 14 гайкой 15. Основание 13 имеет паз 16. На основании 13 закреплены вакуумные захватные элементы готового изделия 17, соединенные пневмошлангами 18 с источником 19 разрежения. На шатунах 8
Сл) N3 N5
ON
закреплены упоры 20, верхние концы которых вставлены через отверстия корпуса 1 в пазы 16 основания 13, Упоры 20 можно перемещать вдоль шатунов 8 и фиксировать силой трения, создаваемой затяжкой болта и гайки 21.
Захватное устройство работает следующим образом,
В исходном положении шток пневмопривода 5 втянут, шатуны 8 находятся в крайнем левом положении, захватные эле- ;менты 4 заготовки подняты, основания 13 I повернуты. При подаче воздуха в левую по- |лость пневмопривода 5 шток.выдвигает- |ся, поворачивая валы 2, 3 и 6. Захватные |элементы 4 заготовки, поворачиваясь, про- |тыкают и захватывают заготовку. Одновре- |менно шатуны 8, соединяющие кривошипы 7, смещаются вправо, и установленные упоры
20, перемещаясь, воздействуют на противопо- ложные края пазов 16, поворачивая основания 13. Линии, соединяющие центры захватных элементов готового изделия 17, |:тановятся параллельными. Далее манипулятор ориентирует захватное устройство рхваченной заготовкой вверх, а захват- ыми элементами готового изделия - низ, затем перемещает захватное устрой- (fTBo на готовые изделия, расположенные и параллельных гнездах пресс-формы, Ис- ioчники 19 разрежения через пневмош- /)анги 18 отсасывают воздух, и готовые изделия захватываются. Далее манипулятор, поворачивая захватное устройство.
риентирует его заготовкой вниз, а гото- ыми изделиями - вверх. Подается воз- ,ух в правую полость пневмопривода , шток которого, втягиваясь, поворачивает валы 2, 3 и 6, Захватные элементы 4 заготовки поднимаются, и заготовка отпу- 4 ckaercp. При этом шатуны 8 смещаются влево, и упоры 20 поворачивают основания 13
с -захватными элементами 17, удерживающими готовые изделия. Далее изделия переносятся к устройству обработки и по одному укладываются в гнезда. Для увеличения угла поворота ослабляются винты 10 и кривошипно-рычажные механизмы с упором 20 смещаются в сторону оси 12 вращения основания. Для уменьшения угла поворота механизмы смещаются в противо положном направлении. Исходный угол ориентации устанавливается смещением упоров 20 вдоль шатунов 8.
Формула изобретения Захватное устройство, содержащее корпус, на котором смонтированы захватные элементы для заготовки, привод перемещения захватных элементов для заготовки и захватные элементы для готового изделия, установленные относительно захватных элементов для заготовки с противоположной стороны корпуса, отличающееся тем, что, с целью расширения функциональных возможностей и повышения производительности, оно снабжено валами, установленными на корпусе параллельно друг другу, кривошипно-шатунными механизмами с упорами, а также основаниями с пазами, установленными на корпусе с возможностью вращения относительно него, при этом захватные элементы для готового изделия закреплены на основаниях, захватные элементы для заготовки установлены на валах, валы соединены кривошипно-шатунными механизмами, упоры установлены на шатунах последних с возможностью регулировочного перемещения и возможностью взаимодействия с основаниями по их пазам: причем кривошипно-рычажные механизмы смонтированы с возможностью регулировочного перемещения относительно валов.
1613226
208
Фиг. 1
13 П
7 д
Фиг. 2
/ч N
. У ХХ У
| Захватное устройство промышленного робота | 1983 |
|
SU1110059A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
