ел
ю
1 .
Изобретелше касается строительны наиин и может быть испопьзпнано при создании сваебойного оборудования большой мощности, а именно подводных гидромолотов рПДЯ сооружения сваных оснований морских буровых raiar формо
Цель изобретения повышение эффективности и надежности работы молота.
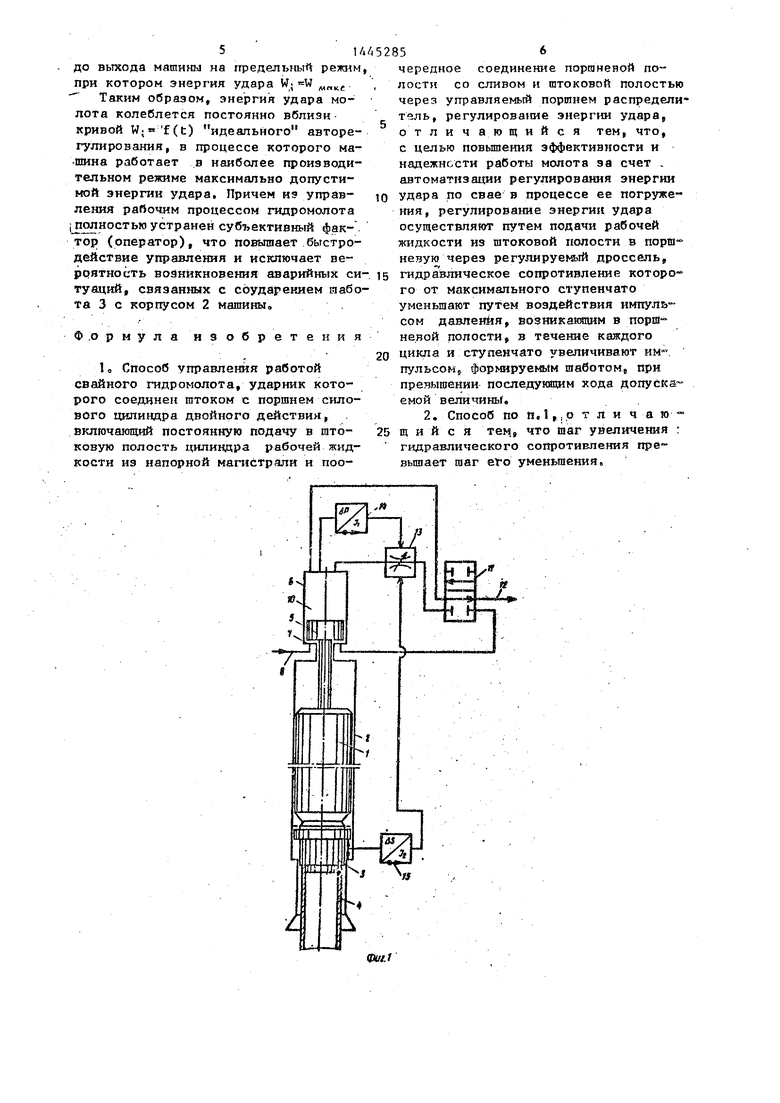
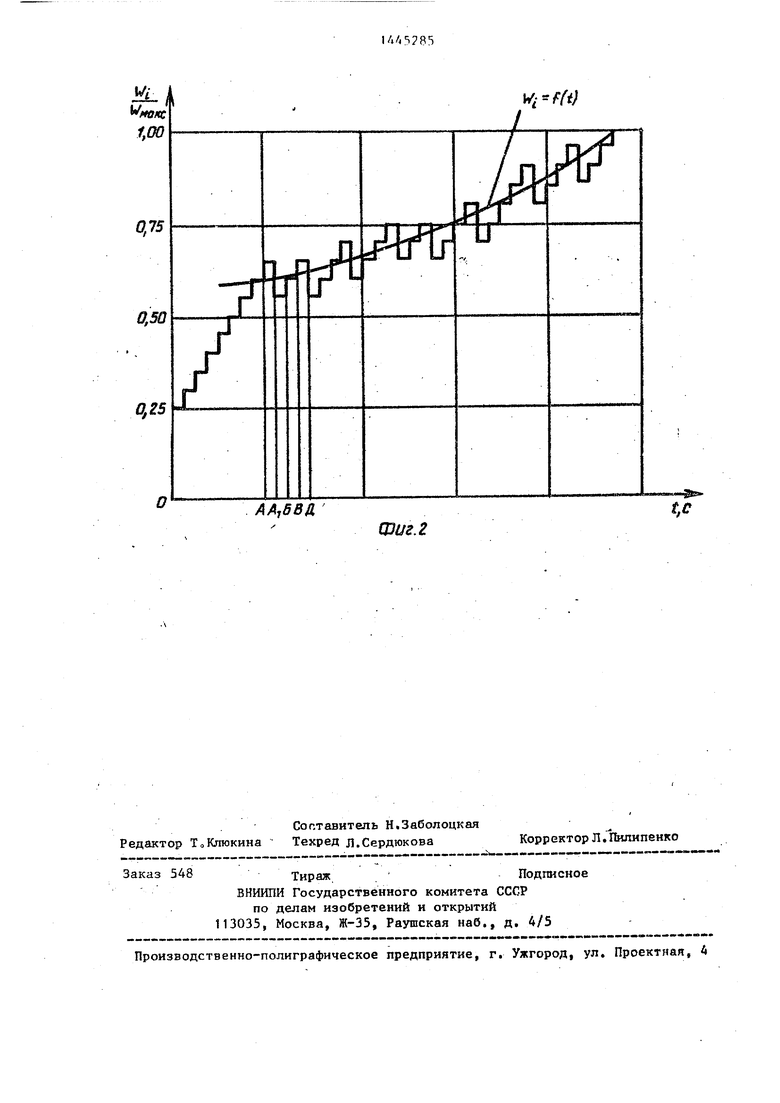
На фиг,1 изображена принципиапь- ная схема иллюстрирукщая предлагаемый способ управления работой моло- та на фиг„2 - диаграмма авторегули рования ударной энергии молота в функции времени,
Способ управления работой свайного гидроиолота осуществляется следующим образом.
Ударник молота, содержащего копус 2, шабот Sf установленный на
свае 4, соединен со шток-порщнем 5 силового цилиндра 6, штоковая-полость 7 которого постоянно сообщена с напорной магистралью 8. Поршневая полость 10 силового цилиндра 6 свя зана через распределитель 11 со што- ковой полостью 7 и со сливным кана лом 12« Установленный на входе в полость 10 упоавляе№ й дроссель 13 сообщен управляющими коммуникациями с источником 14 ci-fflCBoro импульса I,,
формируемого импульсом давления Р в поршневой полости 10 силового 1т,и , линдра и с источником 15 силового импульса I/I, формируемого воздействием шабота 3 в зависимости от его перемеще1шя относительно корпуса 2 молота ,.
Распределитель IV, установленный в нерабочем состоянии молота в положение Долостой ход, разъединяет полости 7 и 10 силового цили}щра 6 и сообщает полость 10 со сливным канапом 12, Дроссель 13 установлен на максимальное гидравлическое сопротивление, при котором обеспечивается функционирование молота в режиме:- минимальной энергии удара. Шток-поршень 5 находится в нижнем полсженни ударьшк 1 опирается на юабот 3«
При пуске мопота рабочая жидкость под давлением Рц поступает из напорной магистрали 8 в полость 7 си- лового цилиндра 6, Под действием давления рабочей жидкости iDTOK-nop- | шень 5 с ударником 1 перемещаются вверх, совершая холостой ход. При
этом рабочая жидкость из полости 10, давление в которой равно давлению Р в спивном канале 12, вытесняется
0
s
5
на слив. При пoдxo l,e шток-поршня 5 к крайнему верхнему положению расп- ределитапь 11 по команде шток-поршня перек1:пючается в положение Рабочий ход, и, таким образом, соединяет между собой рабочие полости 7 и 10 силового цилиндра 6 и отсекает полость 10 от слийного канала 12, Давление в полости 10 возрастает до величины Рц. Таким образом, в поршневой полости реализуется импульс давления ЛР РН -Pt. При этом, поскольку рабочая площадь шток-поршня , 5 в поршневой полости 10 больше,
чем в штоковой полости 7, начинает- 0 «ся процесс торможения шток-поршня 5 результирующей Р, гидростатических сил давления рабочей жидкости в полостях и силой тяжести Р- ударника 1 (см.фиг.2), Этот процесс сопровождается интенсивным сжатием -рабочей жидкости в полости 10 за счет инерции движения шток-поршня 5 совместно с массивным ударником 1. В результате к моменту остановки шток-поршня 5 в крайнем верхнем положении давление в полости 10 возрастает до некоторого значения Р кикс Рн и, таким образом, реализуется еще один импульс давления Р РМОКС РН. Источник 14 силового импульса, функционируюшнй от одного из вышеприведенных импульсов дaвлe tия в полости 10, формирует уп- равлякяций силовой импульс 1, кото- рьй уменьшает гидравлическое сопротивление дросселя 13 на заданный шаг.
В (игедующий момент времени достигший крайнего верхнего положения шток-поршень 5 под действием упомянутых результирующей силы Рд и силы тяжести Р ударника 1 начнет перемещаться вниз, совершая рабочий ход. В конце рабочего хода ударник 1 нане сет удар по шаботу 3, в результате чего шабот со сваей 4 сместятся вниз относительно корпуса 2 молота ка величину проходки за удар. Вслед за шаботом 3 переместится корпус 2, которьй а конце перемещения займет первоначальную позицию, соответствующую его положению на фиг.1. В мо0
5
0
5
0
5
щий удару, шток-поргаень 5 переключит распределитель 11 в положение Холостой ход и, таким обратом, ряссоеди lAA
И г ПОЛПСТИ 7 и 10 и ОД11ОВР«М(ННО
сообгаит полость 10 со слипиым канаом 12, Давление п полости 10 сравняется с данлр.инем слива Гс и п сле- уюинй за упарим Morfei;T яремени шток- поршень 3 с ударником 1 нод действием давления поступаюгцей из напорной магистрали 8 в ттоковут полость 7 рабочей жидкости переметаться вверх, совершая холостой ход,
С этого момента вышеописанный рабочий цикл периодически повторяется. Причем в качестве сигнала на источник 14 силового импульса для регулирования дросселя 13 может быть использован и отрицательный импульс давления н полости 0- ЛР-Р(- -Рц возникаюш1Й при переключении распределителя из положения Рабочий ход в положение Холостой ход. .
Из описанного ясно, что с каждым циклом молота осуществляется автоматическое ступенчатое снижение гидро- сопротив-пения дросселя 13 и, соответственно, увеличение расхода рабочей жидкости в поршневую полость 10 силового цилиндра 6, Это позволяет увеличивать кинетическую энергию ударника 1 и частоту ударов от цикла к циклу без изменения хода ударника, величина которого H const, Так, если в начале работы молота гидросопротивление дроссйля 13 максимально, то при разгоне шток-поршня 5 в процессе рабочего хода ударника 1 из-за малого расхода рабочей жидкости 1ерез дроссель 13 давление в полости 10 интенсивно падает.
По мере роста расхода через дрос - сель 13 давление в полости 10 при разгоне шток-портня 5 с ударником 1 во время рабочего хода падает менее интенсивно.
При полностью выведенном дроссе- ле 13, когда его п 1дросопротивление практически равно нулю, кинетическая энергия ударника 1 максимальна,
Б процессе ступенчатого нарапш- вания кинетической энергии ударника возможны случаи, когда проходка сваи 4 за удар окажется велика настолько, что перемещение шабота 3 относительно корпуса 2 молота превысит допустимое значение на величшту S, По сигналу , в результате силового воздействия шабота, источник 15 сформирует упрарляю1 шй силопой импульс 1 , который ут)еличт{т гидросопрптив3
jicrinc лрогселч 1 на Г1адаи1гый изг. Причем, чтоОы при iiccjH nyKimeM холостом ходе тток-порганл 5 гидросоп- ротиапенне дросселя 13 вновь не уменьшилось до прежнего уровня в результате срабатывания источника 14 силового импульса I.,, шаг наращивания гидросопротивления силовым импульсом I; устанавливается большим шага его по сигналу силового импульса I,.
5
0
5
0
5
0
5
0
5
При зтом процесс авторегулирования согласно диаграмме на фиг.2 протекает следукщим образом, - В начале работы в интервале времеш ОЛ осуществляется процесс автоматической настройки молота на режим путем ступенчатого нарашивания энерг ш удара W,- от минимального значения, например 0,25 некоторой максимально допустимой величины, при которой для конкретных грунтовых условий реализуется наибоаьтая возможная проходка сваи за удар, К моменту времени А величина энергии удара превысит допустимый максимум. Проходка сваи за удар увеличится настолько, что ход шабота 3 относительно корпуса 2 молота превзойдет допустимое значение на величину IS, В результате в момент времени А сра батывает источник 15 силового импульса I ,j, ПадросопротиБление дросселя дискретно возрастает. Причем, так как шаг у зеличения гидросопро- тивления дросселя заведомо больше шага его уменьшения по сигналу источника 14 силового импульса 1, энергия удара W в следующем рабочем цикле молота с тзится настолько, что станет меньше максимально допустимого значения (интервал време)ги А ,Н на фиг. 2), Поэтому в следукядих циклах молота будет работать только источник 14 силового импульса I, , снижающий гидросопротивление дросселя 13, Энергия удара W- начнет ступенчато возрастать (моменты времени Б,В), пока вновь не превысит .максимально допустимьш уровень (интервал БД) ив момент времени Д вновь включится источник 15 импульса 17. Далее процесс авторегулирования э}1ергни удара молота многократно повторяется, сохраняя по мере роста сопротивле1шл спаи погружению тенденцию к возрастанию V- вплоть
У
)
| название | год | авторы | номер документа |
|---|---|---|---|
| Свайный молот | 1991 |
|
SU1794135A3 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ УДАРНЫМ СПОСОБОМ | 2012 |
|
RU2517267C1 |
| МОЛОТ | 1998 |
|
RU2153556C2 |
| СПОСОБ ИСПЫТАНИЯ УСТРОЙСТВ УДАРНОГО ДЕЙСТВИЯ И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2521718C2 |
| МОЛОТ | 1997 |
|
RU2123090C1 |
| ГИДРОМОЛОТ | 1996 |
|
RU2109105C1 |
| Свайный молот | 1988 |
|
SU1548343A1 |
| Гидромолот | 1989 |
|
SU1744198A1 |
| Гидромолот | 1975 |
|
SU739182A1 |
| УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ | 2010 |
|
RU2444623C2 |
Изобретение относятся к строительным машинам, в частности к сваебойному оКорущ}ванкп для сооружения морских буровых платформ, Изоброте ние повышает эффективность и надежность работы молота за счет автомати- зацли процесса регул11рования энергии удара по свае в процессе ее погружения. Для этого рабочую ж$щкость из штоковой полости в поршневую пропускают через регулируемый дроссель, Гидравлическое сопротивление дросселя ступенчатого уменыиагот от исходного максимального воздействием импульса давления, возникающего в поршневой полости, и ступенчато увеличивают силовым импульсом, который формируется ходом шабота ттри превышении им хода допустимой величины, 1 э,п, ф-лы, 2 нл. U S (Л
Шиг.г
| Питательное приспособление к трепальной машине для лубовых растений | 1923 |
|
SU343A1 |
| кп | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
