сд
О5 со
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в вертикально-шпиндельных хлопкоуборочных машинах.
Цель изобретения - повышение эффективности в работе за счет управления частотой вращения шпинделей.
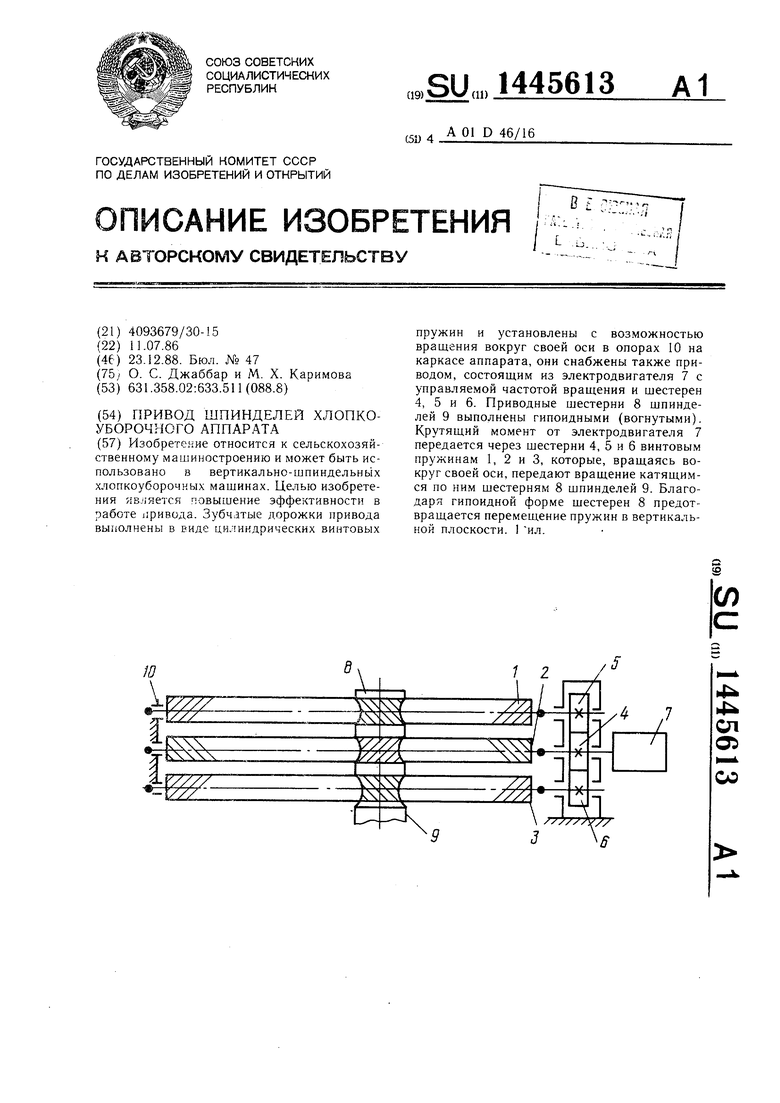
На чертеже изображен предлагаемый привод, вид сбоку.
Привод шпинделей хлопкоуборочного аппарата состоит из зубчатых дорожек в виде цилиндрических винтовых пружин -3, жестко связанных с ними шестерен 4-6, электродвигателя 7 с управляемой частотой вращения, приводных шестерен 8 шпинделей 9. Пружины 1-3 установлены в опорах 10 на каркасе (не показан).
Привод работает следуюш,им образом.
Вращение от электродвигателя 7 передается через находящиеся между собой Е ia- цеплении шестерни 4-6 винтовым пружинам 1-3, крторые, вращаясь вокруг собственной оси, вращают охватываемые ими приводные шестерни 8 шпинделей 9.,При этом шпиндели перемещаются вдоль пружин вместе с барабаном {не показан).Оптимальное количество дорожек-пружин определяется в зависимости от нагрузки и габаритов привода и может быть больше единицы. При этом для обеспечения передачи вращающ.его момента от всех дорожек в
0 одном направлении направление навивки соседних пружин должно быть npOTHBOnOvTOKным.
Гипоидная форма зубьев приводной шестерни 8, а также выполнение пружины, охватывающей эти шестерни, предотвращает колебания пружин в вертикальной плоскости.
За счет изменения направления вращения электродвигателя 7, аналогичные дорожки могут быть использованы и в съемных зонах шпиндельного барабана.
При перегрузках и торможении в зоне реверса шпинделей витки упругих пружин выходят из зацепления с зубьями приводных шестерен 8 и привод работает как фрикционный, предотвращая поломку приводных элементов.
Формула изобретения
Привод шпинделей хлопкоуборочного аппарата, содержащий шпиндели с приводны.ми шестернями, входящими з зацепление с охватывающей их зубчатой дорожкой, отличающийся тем, что, с целью повышения эффективности в работе за счет управления частотой вращения шпинделей, зубчатые дорожки выполнены в виде цилиндрических винтовых пружин, установлены, с возможностью вращения вокруг своей оси и снаб- ) приводом, а приводные шестерни шпинделей выполнены гипоидными.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШПИНДЕЛЬНЫЙ БАРАБАН ВЕРТИКАЛЬНО-ШПИНДЕЛЬНОГО ХЛОПКОУБОРОЧНОГО АППАРАТА | 1971 |
|
SU312574A1 |
| Шпиндель хлопкоуборочного аппарата | 1986 |
|
SU1367905A1 |
| Хлопкоуборочный аппарат | 1981 |
|
SU1025364A1 |
| ФРИКЦИОННЫЙ ПРИВОД ШПИНДЕЛЕЙ ХЛОПКОУБОРОЧНЫХМАШИН | 1971 |
|
SU308707A1 |
| МЕХАНИЗМ ПРИВОДА ШПИНДЕЛЕЙ ВЕРТИКАЛЬНО- ШПИНДЕЛЬНОГО ХЛОПКОУБОРОЧНОГО БАРАБАНА | 1972 |
|
SU339268A1 |
| Привод шпинделей вертикально-шпиндельного хлопкоуборочного барабана | 1987 |
|
SU1708181A1 |
| Приводной ролик шпинделя хлопкоуборочного аппарата | 1975 |
|
SU548230A1 |
| Привод шпинделей хлопкоуборочного аппарата | 1990 |
|
SU1787359A1 |
| Привод шпинделей вертикально-шпиндельного хлопкоуборочного барабана | 1977 |
|
SU654212A1 |
| Шпиндельный барабан хлопкоуборочного аппарата | 1985 |
|
SU1279560A1 |
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в вертикально-шпиндельнь 1х хлопкоуборочных машинах. Целью изобретения KBJiHercR повышение эффективности в работе jjpHBOAa. Зубчатые дорожки привода выполнены в Еиде цилиндрических винтовых пружин и установлены с возможностью вращения вокруг своей оси в опорах 10 на каркасе аппарата, они снабжены также приводом, состоящим из электродвигателя 7 с управляемой частотой вращения и щестерен 4, 5 и 6. Приводные шестерни 8 шпинделей 9 выполнены гипоидными (вогнутыми). Крутящий момент от электродвигателя 7 передается через шестерни 4, 5 и 6 винтовым пружинам 1, 2 и 3, которые, вращаясь вокруг своей оси, передают вращение катящимся по ним шестерням 8 шпинделей 9. Благодаря гипоидной форме щестерен 8 предотвращается перемещение пружин в вертикальной плоскости. 1 ил.