00 00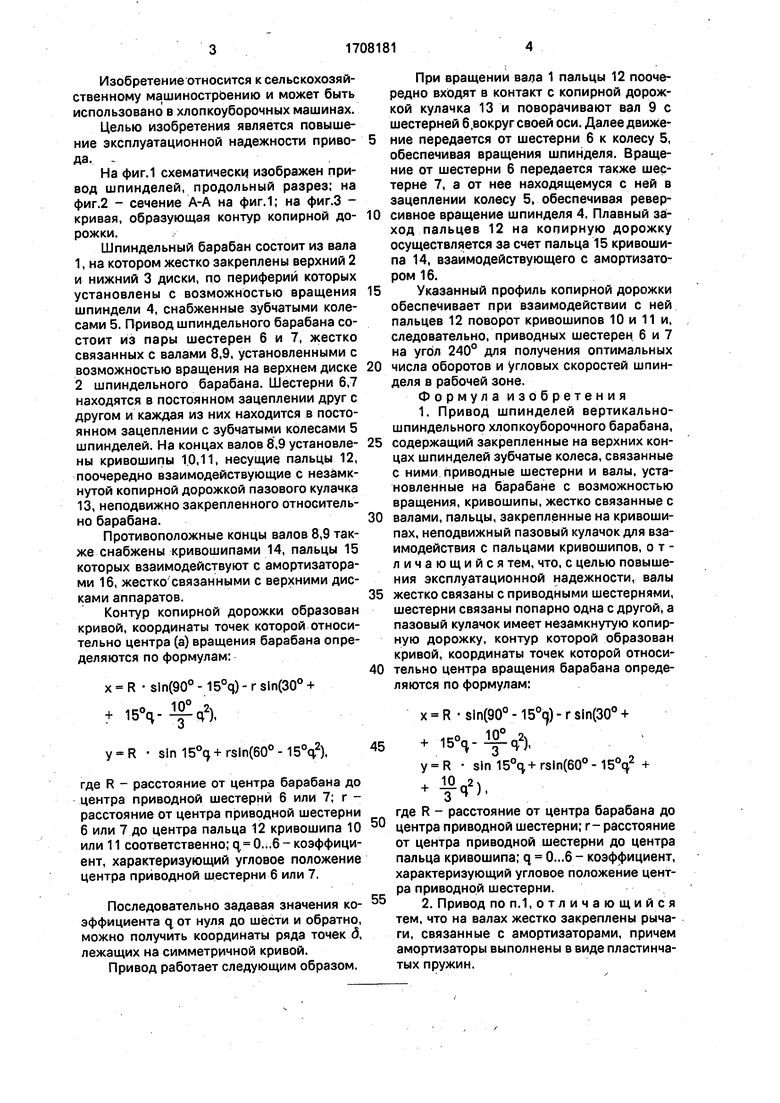
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм привода шпинделей хлопкоуборочного барабана | 1986 |
|
SU1697617A1 |
| Привод шпинделей хлопкоуборочного барабана | 1980 |
|
SU902690A1 |
| Привод шпинделей вертикально-шпиндельного хлопкоуборочного барабана | 1977 |
|
SU654212A1 |
| Жесткий привод к шпинделю хлопкоуборочной машины | 1956 |
|
SU109068A1 |
| Привод шпинделей хлопкоуборочного барабана | 1988 |
|
SU1789113A1 |
| МЕХАНИЗМ ПРИВОДА ШПИНДЕЛЕЙ ХЛОПКОУБОРОЧНЫХ МАШИН | 1965 |
|
SU214224A1 |
| ПРИВОД ШПИНДЕЛЕЙ ХЛОПКОУБОРОЧНОГО АППАРАТА | 1971 |
|
SU294578A1 |
| Механизм поворота шпиндельного барабана многошпиндельного токарного автомата | 1977 |
|
SU665989A1 |
| Привод шпинделей вертикально-шпиндельного хлопкоуборочного барабана | 1990 |
|
SU1794383A1 |
| РАЗДВИЖНАЯ ИЛИ ПОВОРОТНО-РАЗДВИЖНАЯ ДВЕРЬ (ВАРИАНТЫ) | 2005 |
|
RU2372462C2 |

Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в конструкциях п|эивода шпинделей хлопкоуборочных аппаратов. Целью изобретения является повышениеэксплуатационной надежности привода. Привод состоит из установленных на верхнем диске шестерен 6 и 7, находящихся в зацеплении друг с другом, установленных на валах 8 и 9 с возможностью вращения вокруг своих осей. Шестерни 6 и 7 также находятся в постоянном зацеплении с зубчатыми колесами 5 шпинделей. На валах 8 и 9 установлены кривошипы 10,11 с пальцами 12. Также привод содержит кулак 13, незамкнутая дорожка которого поочередно взаимодействует с пальцами 12. Привод работает следующим образом. При вращении шпиндельного барабана пальцы 12 поочередно взаимодействуют с копйрной дорожкой кулака 13, поворачивая шестерню 6 и вращая шпиндель 4. При повороте шестерни 6 она вращает шестерню 7 и через зубчатое колесо 5 реверсирует шпиндель 4. .1 з.п. ф-лы, 3 ил.•ч^Ё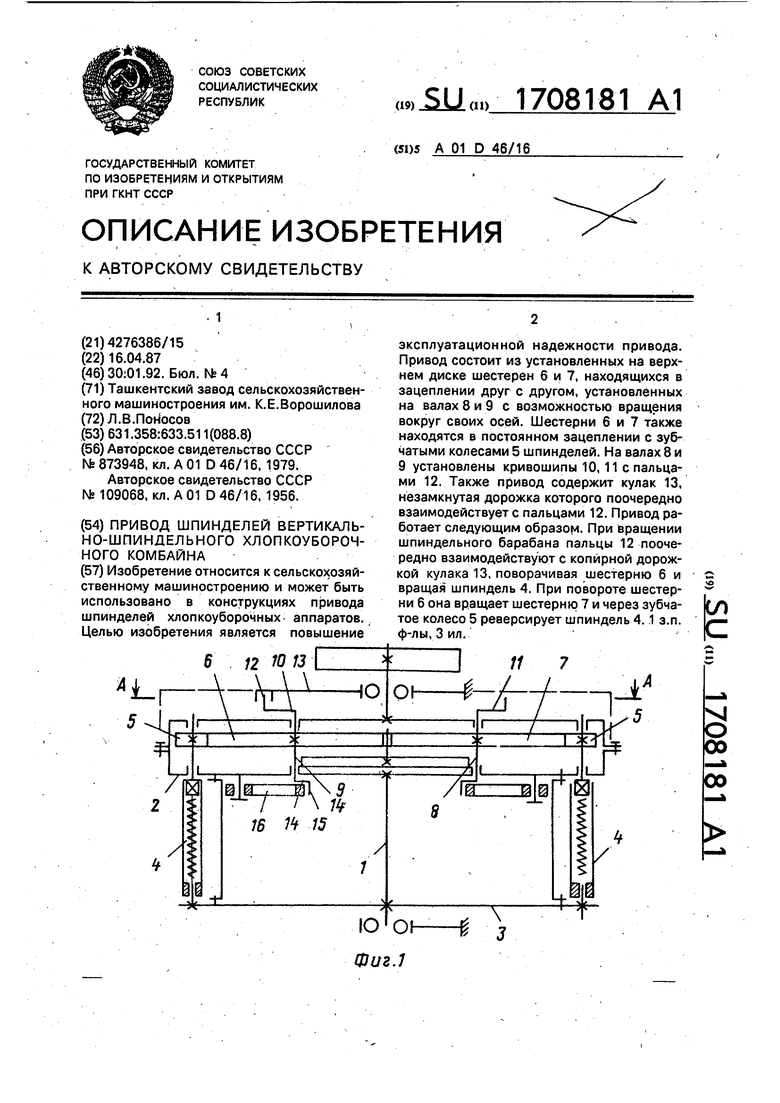
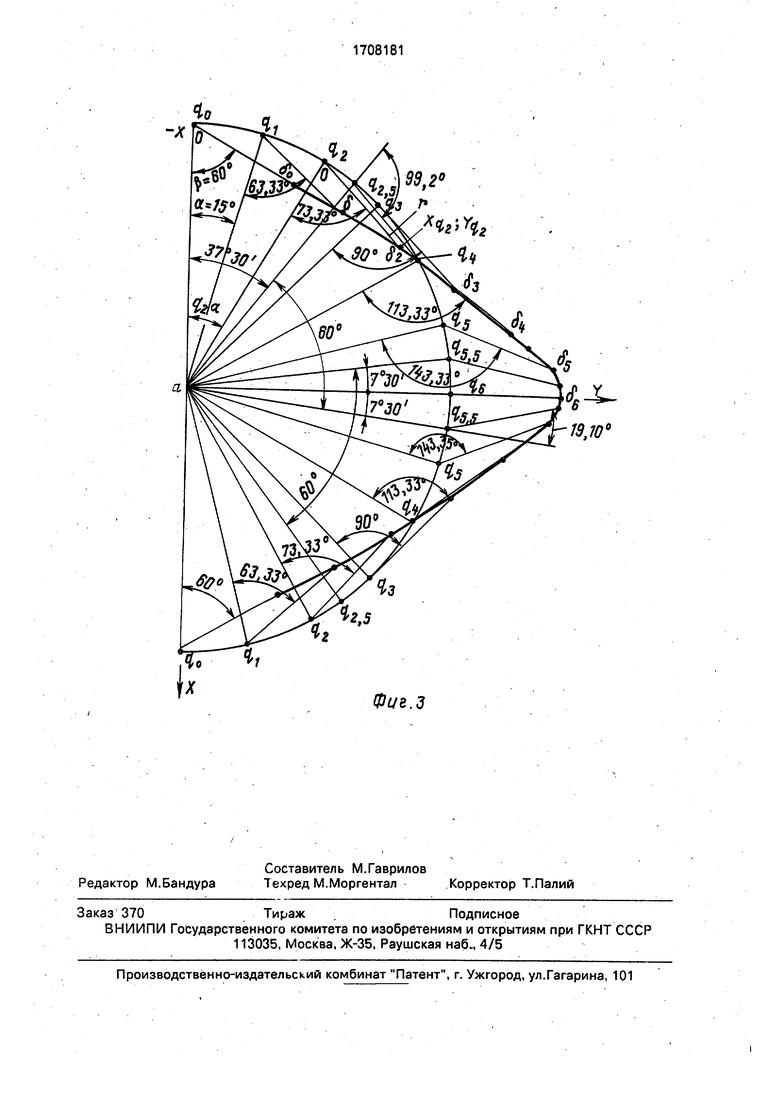
Фиг.1 Изобретение относится к сельскохозяйственному машинострЬению и может быть использовано в хлопкоуборочных машинах. Целью изобретения является повышение зксплуатационной надежности привода. На фиг.1 схематически изображен привод шпинделей, продольный разрез; на фиг.2 - сечение А-А на фиг.1,- на фиг.З кривая, образующая контур копирной дорожки.: Шпиндельный барабан состоит из вала 1, на котором жестко закреплены верхний 2 и нижний 3 диски, по периферий которых установлены с возможностью вращения шпиндели 4, снабженные зубчатыми колесами 5. Привод шпиндельного барабана состоит из пары шестерен 6 и 7, жестко связанных с валами 8.9, установленными с возможностью вращения на верхнем диске 2 шпиндельного барабана. Шестерни 6,7 находятся в постоянном зацеплении друг с другом и каждая из них находится в постоянном зацеплении с зубчатыми колесами 5 шпинделей. На концах валов 8,9 установлены кривошипы 1.0,11, несущие пальцы 12, поочередно взаимодействующие с нездмкнутой копирной дорожкой пазового кулачка 13, неподвижно закрепленного относительно барабана. Противоположные концы валов 8,9 также снабжены кривошипами 14, пальцы 15 которых взаимодействуют с амортизаторами 16, жестко связанными с верхними дисками аппаратов. Контур копирной дорожки образован кривой, координаты точек которой относительно центра (а) вращения барабана определяются по формулам: X R sin(90° - 15°q) - г sin(30° + + 15°, у R sin 15°9 + rsin(60° - 15V). где R - расстояние от центра барабана до центра приводной шестерни 6 или 7; г расстояние от центра п|риводной шестерни 6 или 7 до центра пальца 12 кривошипа 10 или 11 соответственно; q, O.i.6 - коэффициент, характеризующий угловое положение центра приводной шестерни 6 или 7, Последовательно задавая значения коэффициента q от нуля до шести и обратно, можно получить координаты ряда точек (5, лежащих на симметричной кривой. Привод работает следующим образом. При вращении 1 пальцы 12 поочередно входят в контакт с копирной дорожкой кулачка 13 и поворачивают вал 9 с шестерней б.вокруг своей оси. Далее движение передается от шестерни 6 к колесу 5, обеспечивая вращения шпинделя. Вращение от шестерни 6 передается также шестерне 7, а от нее находящемуся с ней в зацеплении колесу 5, обеспечивая реверсивное вращение шпинделя 4. Плавный заход пальцев 12 на копирную дорожку осуществляется за счет пальца 15 кривошипа 14, взаимодействующего с амортизатором 16. Указанный профиль копирной дорожки обеспечивает при взаимодействии с ней пальцев 12 поворот кривошипов 10 и 11 и, следовательно, приводных шестерен 6 и 7 на угол 240° для получения оптимальных числа оборотов и угловых скоростей шпинделя в рабочей зоне. Формула изобретения 1. Привод шпинделей вертикальношпиндельного хлопкоуборочного барабана, содержащий закрепленные на верхних концах шпинделей зубчатые колеса, связанные с ними приводные шестерни и валы, установленные на барабане с возможностью вращения, кривошипы, жестко связанные с валами, пальцы, закрепленные на кривошипах, неподвижный пазовый кулачок для взаимодействия с пальцами кривошипов, отличающийся тем, что, с целью повышения эксплуатационной надежности, валы жестко связаны с приводными шестернями, шестерни связаны попарно одна с другой, а пазовый кулачок имеет незамкнутую копирную дорожку, контур которой образован кривой, координаты точек которой относительно центра вращения барабана определяются по формулам: x R sln(90°-15°9)-rsin(30 y R sin 15%+rsin(60°-15V + f о), где R - расстояние от центра барабана до центра приводной шестерни; г- расстояние от центра приводной шестерни до центра пальца кривошипа; q 0...6 - коэффициент, характеризующий угловое положение центра приводной шестерни. 2. Привод по П.1, отличающийся тем, что на валах жестко закреплены рычаги, связанные с амортизаторами, причем амортизаторы выполнены в виде пластинчатых пружин.
W,W
Фиг.З
| Привод шпинделей вертикальношпиндельного хлопкоуборочного барабана | 1979 |
|
SU873948A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
