i
С/)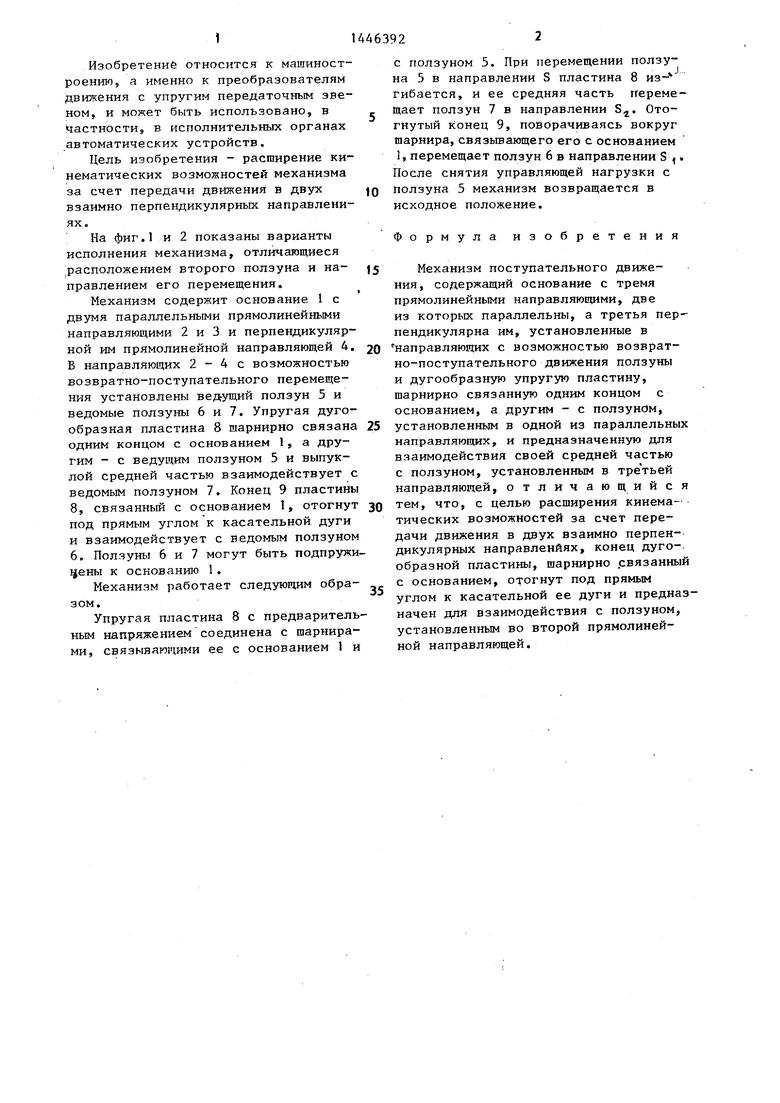
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм преобразования поступательного движения | 1980 |
|
SU1113606A1 |
| ФРИКЦИОННЫЙ ВАРИАТОР ТАДЕВОСЯНА Д.О. | 1990 |
|
RU2025620C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2008 |
|
RU2390406C1 |
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ | 2001 |
|
RU2211344C1 |
| Механизм поступательного движения | 1979 |
|
SU868197A1 |
| ВИНТОШАРОВОЙ ЧЕТЫРЕХТАКТНЫЙ ДВИГАТЕЛЬ | 2007 |
|
RU2347088C1 |
| РУЧНАЯ МАШИНА | 2008 |
|
RU2481178C2 |
| ЗЕНИТНАЯ УСТАНОВКА | 2005 |
|
RU2290587C1 |
| ДВЕРНОЙ ЗАМОК | 2023 |
|
RU2829835C1 |
| Устройство для перемещения по дуге при стереофотосъемке | 1988 |
|
SU1597851A1 |
Изобретение относится к преобразователям дв ижения с упругим передаточным звеном и найдет применение. в частности, в исполнительных орга.- нах автоматических устройств. Цель изобретения - расширение кинематических возможностей за счет передачи движения в двух взаимно перпендикулярных направлениях. При перемеще нии ползуна 5 упругая пластина 8 изгибается и средней частью перемещает ползун 7, а отогнутый конец 9 - ползун 6. При снятии управляющей нагрузки с ползуна 5 механизм возвращается в исходное положение. 2 ил.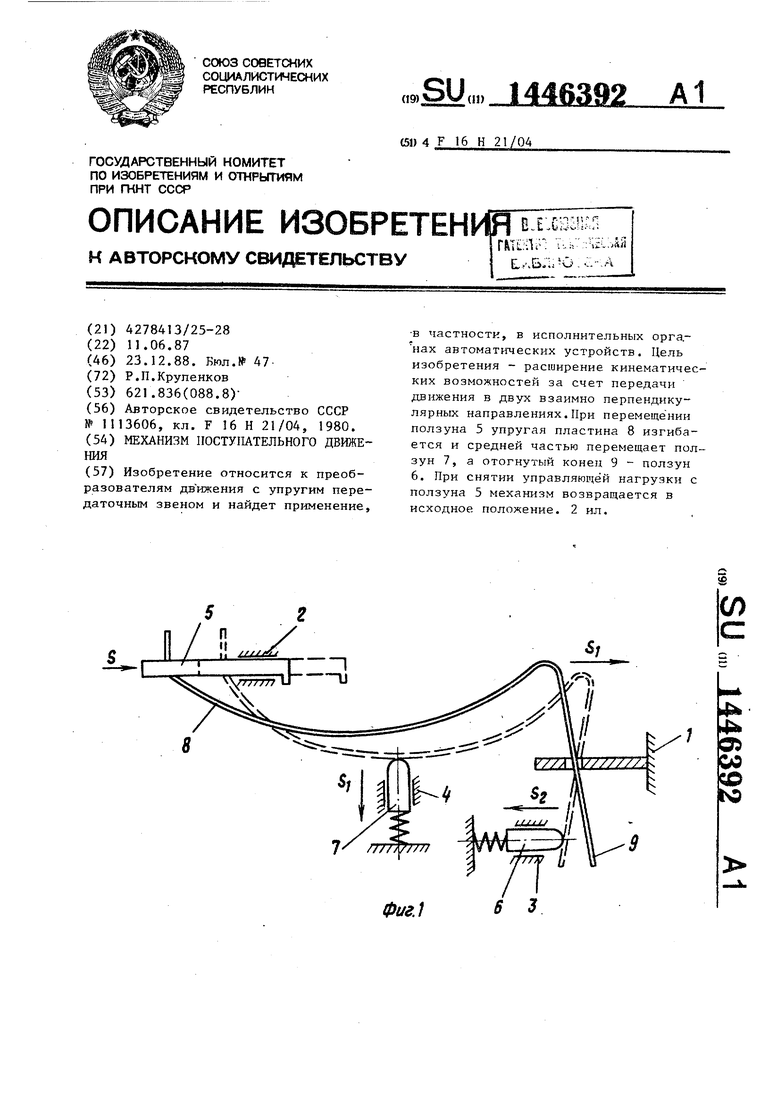
Vс,
фиг.
6 3
Изобретение относится к машиностроению, а именно к преобразователям движения с упругим передаточным эвеном, и может быть использовано, в частности, в исполнительных органах автоматических устройств.
Цель изобретения - расширение кинематических возможностей механизма за счет передачи движения в двух взаимно перпендикулярных направлениях.
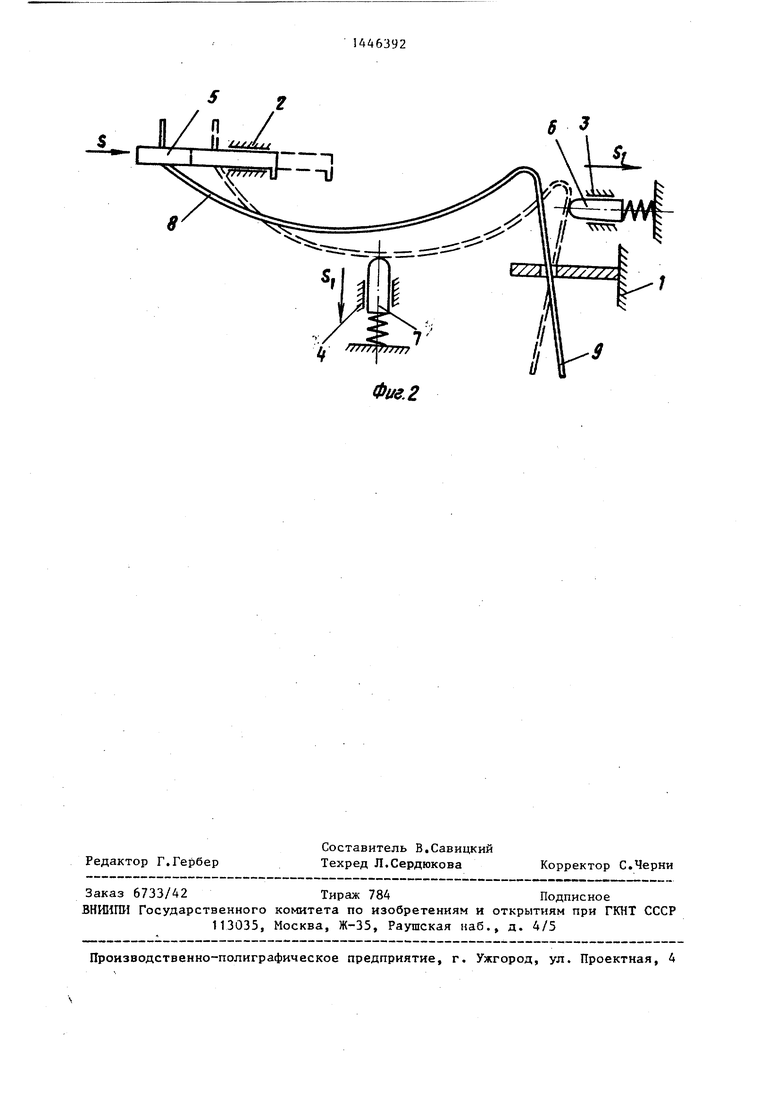
На фиг.1 и 2 показаны варианты исполнения механизма, отличающиеся расположением второго ползуна и на- правлением его перемещения.
Механизм содержит основание 1 с параллельными прямолинейными направляющими 2 и 3 и перпендикулярной им прямолинейной направляющей 4. В направляющих 2 - 4 с возможностью возвратно-поступательного перемещения установлены ведущий ползун 5 и ведомые ползуны 6 и 7. Упругая дугообразная пластина 8 шарнирно связана одним концом с основанием 1, а другим - с ведущим ползуном 5 и выпуклой средней частью взаимодействует с ведомым ползуном 7. Конец 9 пластины 8, связанный с основанием 1, отогнут под прямым углом к касательной дуги и взаимодействует с ведомым ползуном 6. Ползуны 6 и 7 могут быть подпружи цены к основанию 1.
Механизм работает следующим образом.
Упругая пластина 8 с предварительным напряжением соединена с шарнирами, связывающими ее с основанием 1 и
Q
5
0 5 о
5
с ползуном 5. При перемещении ползуна 5 в направлении S пластина 8 гибается, и ее средняя часть перемещает ползун 7 в направлении S. Отогнутый конец 9, поворачиваясь вокруг шарнира, связьшающего его с основанием 1, перемещает ползун 6 в направлении S . После снятия управляющей нагрузки с ползуна 5 механизм возвращается в исходное положение.
Формула изобретения
Механизм поступательного движения, содержащий основание с тремя прямолинейными направляющими, две из которых параллельны, а третья перпендикулярна им, установленные в направляющих с возможностью возвратно-поступательного движения ползуны и дугообразную упругую пластину, щарнирно связанную одним концом с основанием, а другим - с ползуном, установленным в одной из параллельных направляющих, и предназначенную для взаимодействия своей средней частью с ползуном, установленным в тре тьей направляющей, отличающийся тем, что, с целью расширения кинема-- тических возможностей за счет передачи движения в двух взаимно перпендикулярных направлениях, конец дуго-. образной пластины, шарнирно .связанный с основанием, отогнут под прямым углом к касательной ее дуги и предназначен для взаимодействия с ползуном, установленным во второй прямолинейной направляющей.
5 У
3
