Предлагаемое изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, применяемым для выполнения вспомогательных операций при обслуживании технологических машин и устройств различного назначения. Такие манипуляционные механизмы, имитируя определенные движения рук человека, обеспечивают «схват» изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис.а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами в линиях высокой производительности.
Известно также устройство типа «рука» для передачи изделий, выполненное в виде комбинированного механизма, содержащего передаточный механизм с ведущим звеном, исполнительный механизм с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий, и привод (патент №2193963 РФ, опубл. в БИПМ, 2002. - №34 - прототип). Данное устройство является средством того же назначения, что и предлагаемое изобретение.
Основным недостатком прототипа являются, во-первых, то, что на границах ходов, т.е. есть в позициях «схват» изделия и «выдача» изделия, выходные звенья с губками совершают лишь «мгновенные» (кратковременные) выстои, связанные с изменением направления скорости движения выходного звена передаточного механизма; во-вторых, то, что траектория движения выходных звеньев с губками не является прямолинейной в интервалах ходов.
«Мгновенные» выстой на границах ходов снижают качество выполнения операции «схват» изделия, что в свою очередь снижает точность реализации последующих операций, таких как: удерживание, перенос, освобождение и выдача изделия. Для исключения такого негатива можно уменьшить скорость выходного звена передаточного механизма, но это не всегда допустимо, поскольку приводит к снижению частоты повторения рабочих циклов и уменьшению производительности устройства.
Движение выходных звеньев с губками по дугообразной траектории нередко оказывается менее предпочтительным и даже неприемлемым по сравнению с прямолинейным движением из условий компоновки (размещения) устройства между машинами технологической линии.
Задачей настоящего изобретения является повышение точности работы и производительности манипулятора.
Решение поставленной задачи достигается тем, что в манипуляторе для передачи изделий, выполненном в виде комбинированного механизма, содержащего передаточный механизм, исполнительный механизм с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий, и привод, передаточный механизм выполнен в виде зубчато-рычажного механизма, который включает ведущее и ведомое зубчатые колеса и кинематически связанное с ними выходное звено, зубчатые колеса выполнены равновеликими, имеют некруглую форму, при этом в положениях сопряжения колес по минимальному радиусу-вектору ведущего колеса и максимальному радиусу-вектору ведомого выходное звено занимает соответствующее крайнее положение, а ведущее звено исполнительного механизма выполнено в виде ползуна, подвижно сопряженного с выходным звеном передаточного механизма и шарнирно связанного с выходными звеньями исполнительного механизма.
Зубчатые колеса передаточного механизма выполнены овальными.
Ведущее звено исполнительного механизма смонтировано в неподвижных прямолинейных направляющих.
Сопряжение ведущего звена исполнительного механизма с выходным звеном передаточного механизма содержит укрепленный на ведущем звене палец и ролик, смонтированный на пальце, а в выходном звене выполнен паз для сопряжения с роликом.
Выполнение передаточного механизма манипулятора в виде зубчато-рычажного многозвенника имеет следующее преимущество. Выходное звено передаточного механизма, кинематически связанное с ведущим и ведомым некруглыми зубчатыми колесами, на границах прямого и обратного ходов, т.е. дважды в периоде кинематического цикла, совершает замедленное движение. Поскольку движением выходного звена передаточного механизма генерируется поступательное движение ведущего и выходных звеньев исполнительного механизма, то следует, что на границах ходов движение выходных звеньев с губками будет замедленным и более благоприятным для выполнения операций «схват» изделия и «выдача» изделия. Для обеспечения этого необходимо, чтобы крайние положения выходного звена передаточного механизма совпадали во времени с положениями зубчатых колес, соответствующими сопряжениям колес при минимальном радиусе векторе ведущего колеса и максимальном радиусе векторе ведомого. Для равновеликих зубчатых колес это обеспечивается при равенстве времени на совершение прямого и обратного ходов выходного звена. Выполнение ведущего звена исполнительного механизма в виде ползуна, сопряженного с выходным звеном передаточного механизма и шарнирно связанного с выходными звеньями исполнительного механизма, позволяет выходным звеньям с губками для захвата изделий совершать поступательное движение в интервалах их прямого (с изделием) и обратного (без изделия) ходов при отсутствии звена (шатуна) между выходным звеном передаточного механизма, совершающим поворотные движения, и ползуном, совершающим прямолинейные движения. Это упрощает кинематическую связь передаточного и исполнительного механизмов.
Выполнение ведущего и ведомого некруглых зубчатых колес передаточного механизма овальными позволяет, в отличие, например, от эллептических зубчатых колес, обеспечивать большее время нахождения выходных звеньев с губками при малых скоростях движения на границах ходов. Это способствует точности выполнения операций «схват» и «выдача» изделия.
Выполнение ведущего звена - ползуна исполнительного механизма в прямолинейных направляющих оказывается во многих случаях предпочтительным для движения выходных звеньев с губками при передаче изделий от машины к машине или из одной позиции в другую. Это особенно ощутимо в технологических линиях, например в линиях рыбоконсервного и пресервного производств.
Сопряжение двух звеньев (ползуна с выходным звеном) посредством пальца на ползуне и паза в выходном звене позволяет исключить из кинематической связи передаточного и исполнительного механизмов одно звено (шатун) и две низшие кинематические пары. Сопряжение ползуна и выходного звена посредством пальца с роликом, укрепленного на ползуне, и паза в теле выходного звена является наиболее простым и технологичным решением.
Заявляемый манипулятор отличается от прототипа конструктивными элементами, связью между элементами, формой выполнения взаимного расположения элементов. Эти отличия способствуют повышению точности работы и производительности манипулятора.
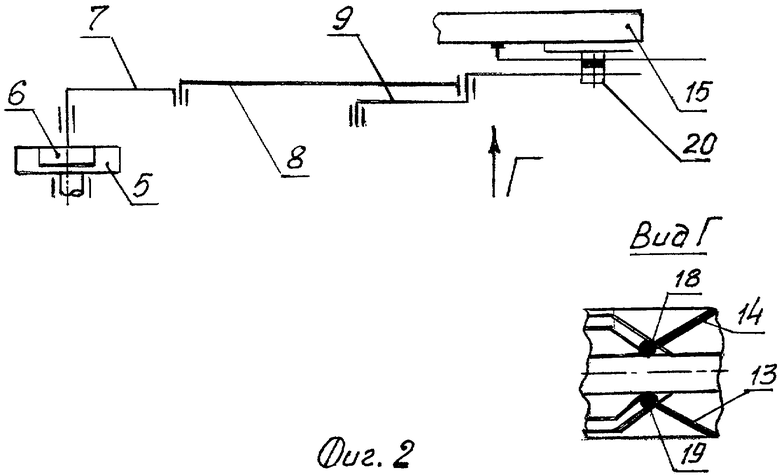
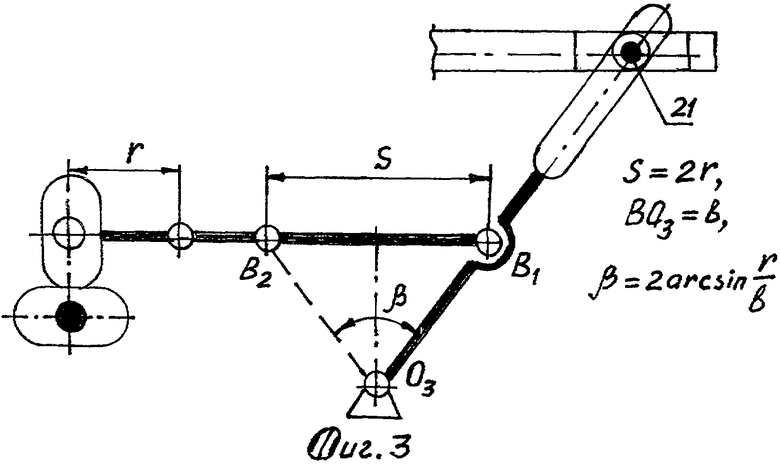
Предлагаемый манипулятор поясняется чертежами. На фиг.1 представлена кинематическая схема манипулятора; на фиг.2 - вид А на фиг.1; на фиг.3 - схема передаточного механизма в крайних положениях выходного звена.
Манипулятор для передачи изделий содержит передаточный механизм 1, исполнительный механизм 2 с губками 3 для захвата изделий и привод 4.
Передаточный механизм 1 выполнен в виде зубчато-рычажного многозвенника, он включает ведущее зубчатое колесо 5, укрепленное на валу привода 4, ведомое зубчатое колесо 6, сопряженное с колесом 5 и шарнирно связанное со стойкой, звенья 7, 8 и 9, выполненные в виде шарнирно связанных стержней, при этом звено 7 жестко укреплено на оси зубчатого колеса 6, звено 9 шарнирно связано со стойкой, оно является выходным звеном передаточного механизма. В концевой части звена 9 выполнен паз 10 для кинематической связи с исполнительным механизмом 2.
Исполнительный механизм 2 включает ведущее звено 11, выполненное в виде ползуна, смонтированного в неподвижных прямолинейных направляющих 12, выходные звенья 13 и 14, шарнирно связанные с ползуном, и неподвижный кулачок-копир 15 с фигурными пазами 16 и 17 для взаимодействия с роликами 18 и 19, смонтированными на свободных концах выходных звеньев 13 и 14. На ползуне 11 укреплен палец 20 с роликом 21 для взаимодействия с пазом 10 выходного звена передаточного механизма. Губки 3 для захвата изделий выполнены по форме передаваемых изделий и закреплены на выходных звеньях 13 и 14 жестко, но разъемно.
Передаточный механизм манипулятора соответствует структурной формуле кинематической цепи - формуле Чебышева
W=3·n-2p5-p4=3·4-2·5-1=1,
где W - степень подвижности механизма, W=1;
n - число подвижных звеньев, n=4;
p5 - число низших кинематических пар, p5=5;
p4 - число высших кинематических пар, p4=1.
Исполнительный механизм манипулятора соответствует структурной формуле кинематической цепи:
W=3·n-2p5-p4=3·2-2·2-1=1,
где n=2 - подвижные звенья: ползун и выходное звено;
p5=2 - низшие пары: ползун-направляющая, выходное звено-ползун;
p4=1 - высшая пара в виде сопряжения ролика выходного звена с фигурным пазом копира.
Кинематическая цепь манипулятора в целом соответствует формуле Чебышева
W=3·n-2p5-p4=3·6-2·7-3=1,
Зубчатые колеса 5 и 6 выполнены равновеликими, имеют овальную форму. Звено 7 укреплено на оси ведомого зубчатого колеса 6 под прямым углом относительно максимального радиуса вектора колеса, выходное звено 9 выполнено двуплечим. Предлагаемое схемное и размерное выполнение элементов передаточного механизма таково, что длины звеньев 7, 8 и 9, расстояние от оси колеса 6 до стойки O3 и длина плеча BO3 звена 9 обеспечивают положение выходного звена механизма на границах его ходов (фиг.3). Варьируя абсолютные длины звеньев механизма, без изменения их относительных длин, можно получить работоспособный передаточный механизм с предпочтительными для условий эксплуатации размерами. При конструктивно выбранных абсолютных размерах звеньев механизм должен удовлетворять условию
S=B1B2=2r,
где S - расстояние между шарниром B в крайних положениях выходного звена;
r - длина звена 7 в схеме механизма.
Манипулятор для передачи изделий работает следующим образом.
При работе привода 4 ведущее зубчатое колесо 5 передаточного механизма, закрепленное на валу привода, совершает вращательное движение с постоянной скоростью. При этом ведомое зубчатое колесо 6, сопряженное с ведущим колесом, совершает вращательное движение с переменной скоростью. Синхронно с колесом 6 вращается укрепленное на его оси звено 7, которое генерирует возвратно-поворотное движение выходного звена 9. Скорость выходного звена на участках границ ходов оказывается минимальной, поскольку крайние положения выходного звена соответствуют сопряжениям колес при минимальном радиусе-векторе колеса 5 и максимальном радиусе-векторе колеса 6.
При поворотном движении звена 9 его паз 10 взаимодействует с роликом 21 пальца 20, укрепленного на ползуне 11, в результате ползун, перемещаясь в направляющих 12, совершает поступательное движение. При этом выходные звенья 13 и 14 с губками 3 совершают сложное движение: поступательное вместе с ползуном 11 и поворотное движение относительно ползуна с выстоями определенной продолжительности. Поворотное движение выходных звеньев генерируется в результате взаимодействия роликов 18 и 19 с фигурными пазами 16 и 17 в теле копира 15. Губки 3 имитируют движение выходных звеньев, при этом на границах ходов выходных звеньев они занимают разжатое положение, в интервалах прямого и обратного ходов выходных звеньев губки занимают сжатое положение.
В позиции «схват» изделия, т.е. при минимальной скорости звеньев 13 и 14, в разжатые губки подается объект манипулирования. В начале рабочего хода губки сжимаются, охватывая изделие по большей части его периметра, и переносят изделие из одной позиции в другую. По достижении позиции «выдача» изделия губки разжимаются, освобождая изделие, и оно выводится из манипулятора. При обратном ходе (без изделия) губки также занимают сжатое положение, поскольку ролики выходных звеньев взаимодействуют с теми же фигурными пазами в теле копира, что и при прямом ходе.
Манипулятор может быть использован для передачи штучных изделий массой до 5 кг и в случаях, когда необходима высокая точность выполнения операций (схват, удерживание, перенос, освобождение и выдача изделия), составляющих процесс передачи штучных изделий из позиции в позицию.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333828C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333829C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438857C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2344031C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2012 |
|
RU2521933C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333827C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2346804C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265509C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2331506C2 |
Манипулятор относится к устройствам, которые применяются при обслуживании машин, станков, прессов и другого оборудования. Манипулятор содержит передаточный механизм, исполнительный механизм с губками для захвата изделий и привод. Передаточный механизм выполнен в виде зубчато-рычажного механизма, который включает ведущее и ведомое равновеликие овальные зубчатые колеса и кинематически связанное с ними выходное звено. Причем в положениях сопряжения колес по минимальному радиусу-вектору ведущего колеса и максимальному радиусу-вектору ведомого колеса выходное звено занимает соответствующее крайнее положение. Исполнительный механизм содержит ведущее и выходные звенья, при этом ведущее звено исполнительного механизма выполнено в виде ползуна, который подвижно сопряжен с выходным звеном передаточного механизма и шарнирно связан с выходными звеньями исполнительного механизма. Изобретение позволяет повысить производительность и точностью работы манипулятора. 3 з.п. ф-лы, 3 ил.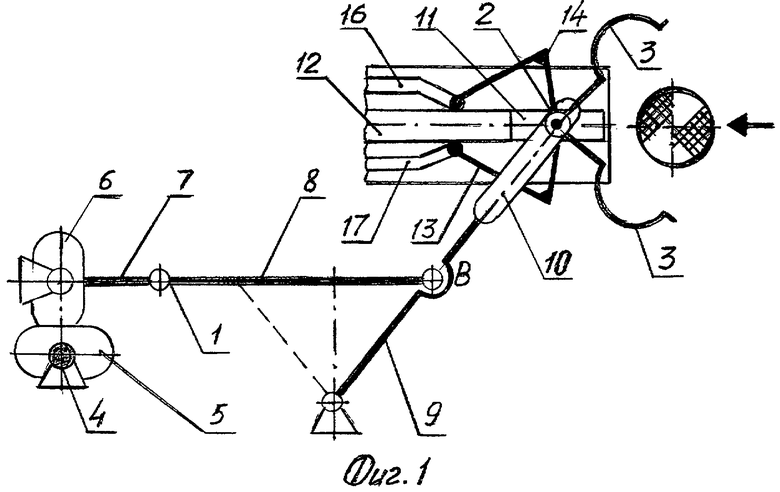
1. Манипулятор для передачи изделий, выполненный в виде комбинированного механизма, содержащего передаточный механизм, исполнительный механизм с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий, и привод, отличающийся тем, что передаточный механизм выполнен в виде зубчато-рычажного механизма, который включает ведущее и ведомое зубчатые колеса и кинематически связанное с ними выходное звено, при этом зубчатые колеса выполнены равновеликими и имеют некруглую форму, причем в положениях сопряжения колес по минимальному радиусу-вектору ведущего колеса и максимальному радиусу-вектору ведомого колеса выходное звено занимает соответствующее крайнее положение, а ведущее звено исполнительного механизма выполнено в виде ползуна, который подвижно сопряжен с выходным звеном передаточного механизма и шарнирно связан с выходными звеньями исполнительного механизма.
2. Манипулятор по п.1, отличающийся тем, что зубчатые колеса передаточного механизма выполнены овальными.
3. Манипулятор по п.1, отличающийся тем, что ведущее звено исполнительного механизма смонтировано в неподвижных прямолинейных направляющих.
4. Манипулятор по п.1, отличающийся тем, что сопряжение ведущего звена исполнительного механизма с выходным звеном передаточного механизма содержит укрепленный на ведущем звене палец и ролик, смонтированный на пальце, а в выходном звене выполнен паз для сопряжения с роликом.
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333828C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2276009C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2193963C1 |
| US 5885052 A, 23.03.1999. | |||

