00
о
Изобретение относится к машиностроению и может быть использовано 5 в частности, в исполнительных органах автоматических устройств.
Известен механизм преобразования поступательного движения ведущего звена Б пост шательное движение ведомого звена,, в котором передаточное звено вьтолнено в виде изогнутой с предварительным натягом упругой гшастины ГГ1„
Недостаткам-и этого механизма являются наличие только одного ведомого звена и невозможность преобразояания движения ведущего в другие виды, кроме поступательного.
Наиболее бли;жим к изобретению по технической суггцюсти является механизм преобразования движения, содержащий осно1занне с прямолинейными направляю1цими 5 размещенный в направляющих с возможностью возврат но-п ос туп ат (in ь ног о перемещения ползун, шарнирно соединенную одним концом с ползуном, а другим - с основанием и изогнутую но синусоиде пластину, и размещенные в основании с шагом,, равным длине полуволны синусо;ады, и с возмояашстью взаимно противоположного возвратно-поступательного двкжения ведомые звенья в виде штоков, подпружиненны со стороны осно1зания и взаимодейст3 Ton jix с вг адин1зй каждой полуволны синусоиды 2.
Однако известный механизм, имея большее количество ведомых звеньевj также не позволяет преобразовывать движение ведущего звена в другие виды, кроме поступательного.
Цель изобретения - расширениефункциональных возможностей механизма за счет преобразования возвратнопосту,пательного движения ведущего звена в сложное движение ведомых звеньев,г одной из состаапяющих которого является вращательное движение .
Указан.ная цепь достигается тем что в механизме преобразования пост тательного дв жения, содержащем основание с прямолинейными направляюгшми5 размещенный в направляющих с возможностью возвратно-поступательного перемещения ползун, шарнирно связанную одним концом с ползуном, а другим - с основанием и изогнутую по син-усонде упругую пластину
и размеще) в основании с щагом, равными длине полуволны синусоиды, и с возможностьк взаимно противоположного возвратно-поступательного движения ведомые звенья в виде щтоков, подпружиненных со стороны основания и взаимодействующих с впадиной каждой полуволны синусоиды, в основании выполнены дополнительные прямолиней ;ые направляюпше , соосные ОСНОВНЫМ; л л;ехя)изм сяабжен папфами с пойодкамИ;, };:естко закрепленными на упругой пластине в точках сопряжения полуволн синусоиды и
5 размещенными в дополнительных направляющих.
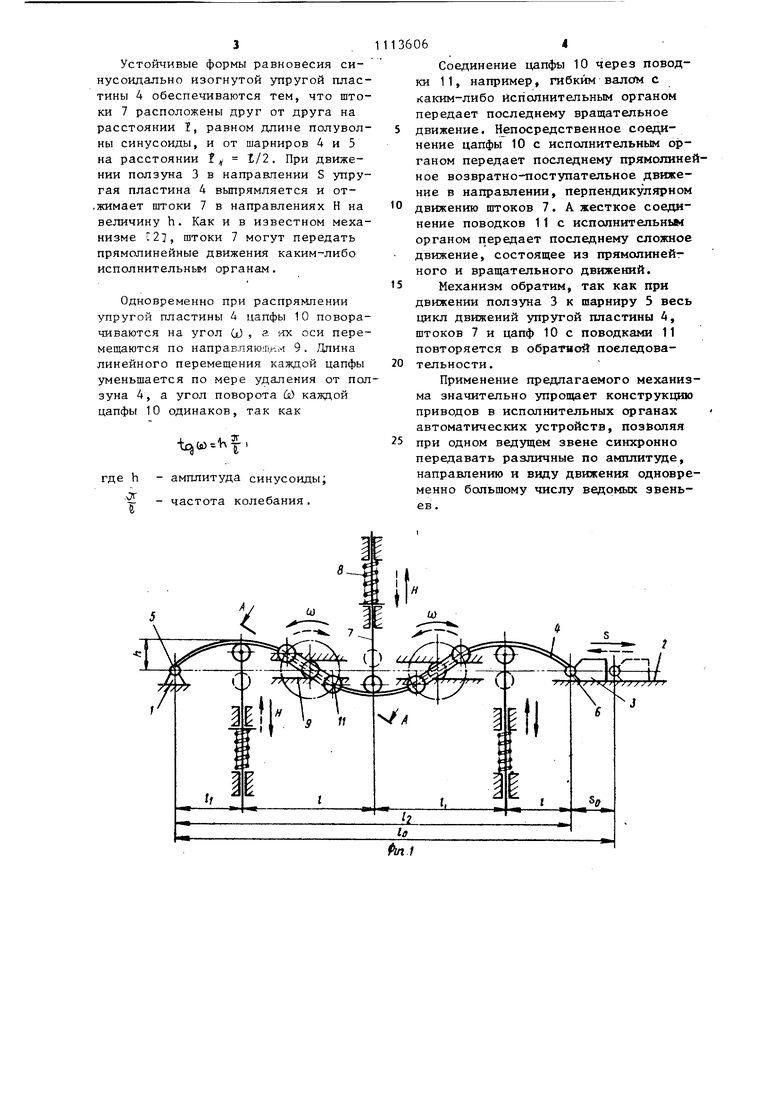
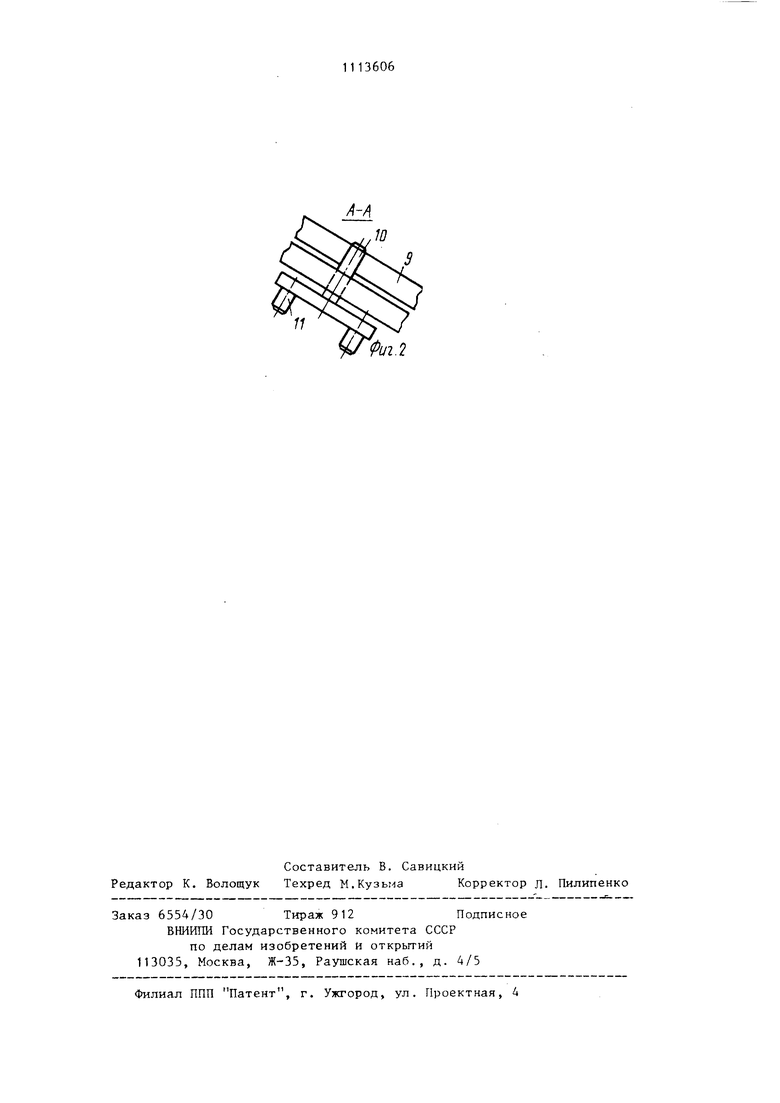
На фиг. 1 изображена кинематическая схема механизма; на фиг. 2 - разрез А-Л на фиг. 1.
0
Механизм содержит основание 1 с направляющими 2, ползун 3, упругую ленту 4, соед,иненную с основанием 1 шарниром 5 и с патзуном 3 шарниром 6, штоки 7, установленные в основании
5 1 противоположно друг другу во впадине каждой папувапны упругой ленты 4 и подпружиненные со стороны осн,ования 1 пружинами 8, В основании 1 имеются дополнительные прямолинейные направляюшие 9s ось которых совпадает с осью направляющих 2, проходящей,, в свою очередь, через оси шарниров 5 и 6. В направляющих 9 размещены цапфы Ю снабженные поводками 11 и жестко соединенные (например пайкой) с упругой лентой 4 так, что ось каждой цапфы 10 проходит через точку сопряжения соответствующих пштуволн синусоиды,, по которой изогнута упругая ш: астина 4 ,
Механизм работает следующим
В исходном положении ползуна 3 его шарнир 6 находится на минимальном расстоянии 1 от шарнира 3 основания 1, Упругая пластина 4 под воздействием подпружиненных штоков 7 изогнута по синусоиде, для которой число полуволн п определяется критической силой FI,D по условию устойчивости Эйлера
с и
где 1(5 -щлина упругой пластины 4
в свободном состоянии, ЕЗ - жесткость пластины; п - число полуволн синусоидаль-1 ной формы.
3.
Устойчивые формы равновесия синусоидально изогнутой упругой пластины 4 обеспечиваются тем, что штоки 7 расположены друг от друга на расстоянии 1, равном длине полуволны синусоиды, и от шарниров 4 и 5 на расстоянии t 1/2. При движении ползуна 3 в направлении S упругая пластина 4 вьтрямляется и от.жимает штоки 7 в направлениях Н на величину h. Как и в известном механизме С27, штоки 7 могут передать прямолинейные движения каким-либо исполнительным органам.
Одновременно при распрямлении упругой пластины 4 цапфы 10 поворачиваются на угол (jt) 5 а шс оси перемещаются по направляю;дим 9. Цлина линейного перемещения кажд,ой цапфы уменьшается по мере удаления от ползуна 4, а угол поворота 6г) каждой цапфы 10 одинаков, так как
Ц (
где h - амплитуда синусоиды; - частота колебания.
а
136064
Соединение цапфы 10 через поводки 1 1 , например, гибким валсгм с каким-либо исполнительным органом передает последнему вращательное
5 движение. Непосредственное соединение цапфы 10 с исполнительным органом передает последнему прямолинейное возвратно-поступательное движение в направлении, перпендикулярном
О движению штоков 7. А жесткое соединение поводков 11 с исполнительньм органом передает последнему сложное движение, состоящее из прямолинейного и вращательного движений.
15Механизм обратим, так как при
движении ползуна 3 к шарниру 5 весь цикл движений упругой пластины А, штоков 7 и цапф 10 с поводками 11 повторяется в обратной поеледова20 тельности.
Применение предлагаемого механизма значительно упрощает конструкцию приводов в исполнительных органах автоматических устройств, позволяя
25 при одном ведущем звене синхронно передавать различные по амплитуде, направлению и виду движения одновременно большому числу ведомых звеньев .
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм поступательного движения | 1979 |
|
SU868197A1 |
| Механизм поступательного движения | 1987 |
|
SU1446392A1 |
| Электромеханический привод | 1989 |
|
SU1695451A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| Пространственный шарнирно-рычажный механизм | 1985 |
|
SU1421921A1 |
| Кривошипно-ползунный механизм с регулируемой остановкой | 1988 |
|
SU1594331A1 |
| Направляющий механизм Савицкого | 1988 |
|
SU1576749A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2002 |
|
RU2237175C2 |
| Цепная передача для преобразованияВРАщАТЕльНОгО дВижЕНия B ВОзВРАТНО-пОСТупАТЕльНОЕ | 1979 |
|
SU815363A1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ, содержащий основание с прямолинейными направляющими, размещенный в направляющих с возможностью возвратно-пос- , тупательного перемещения ползун, шарнирно соединенную одним концом с ползуном, а другим - с основанием и изогнутую по синусоиде упругую пластину, и размещенные в основании с шагом, равным длине полуволны синусоиды, и с возможностью взаимно противоположного возвратно-поступательного движения ведомые звенья в виде штоков, подпружиненных со стороны основания и взаимодействующих с впадиной каждой полуволны синусоиды, отличающийся тем, что, с целью расширения функциональных возможностей, в основании выполнены дополнительные прямолинейные направляющие, соосные основным, а механизм снабжен цапфами i с поводками, жестко закрепленными на упругой пластине в точках сопря(Л жения полуволн синусоиды и размещенными в дополнительных направляющих.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механизм поступательного движения | 1978 |
|
SU693082A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Механизм поступательного движения | 1979 |
|
SU868197A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
