(54) МЕХАНИЗМ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм преобразования поступательного движения | 1980 |
|
SU1113606A1 |
| Механизм поступательного движения | 1978 |
|
SU693082A1 |
| ЗАЩИТНЫЙ БУФЕР ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2538827C1 |
| ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО | 2003 |
|
RU2247273C2 |
| КАРНИЗ КРЫШИ ЗДАНИЯ | 2012 |
|
RU2519029C1 |
| Механизм привода транспортера кормораздатчика | 1989 |
|
SU1644844A1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| ПРИВОД ПОРШНЕЙ ДВИГАТЕЛЯ СТИРЛИНГА | 2015 |
|
RU2627760C2 |
| ЭКСЦЕНТРИКОВЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ ИЛИ КОЛЕБАТЕЛЬНОЕ | 2007 |
|
RU2352839C1 |
| Механизм поступательного движения | 1986 |
|
SU1379531A2 |
1
Изобретение относится к машиностроению и может быть использовано, например, в исполнительных органах автоматических устройств.
Известен механизм поступательного движения, содержащий неподвижную стойку, ползун, ведомое звено/взаимодействующее с ним передаточное звено, шарнирно связан.ное с ползуном и неподвижной стойкой
Недостатком известного механизма является относительная сложность, большое число шарнирных соединений, увеличивающих свободный ход из-зa наличия в них зазоров, при наличии лишь одного ведомого звена.
Наиболее близким по технической, сущности к предлагаемому является механизм поступательного движения,,содержащий неподвижную стойку, ведущее звено в виде ползуна, упругую, пластину, шарнирно связывающую пол-, эун со стойкой, и взаимодействующее с пластиной ведомое звено 123.
Недостатком известного механизма являются ограниченные эксплуатационные возможности в передаче движений, обусловленные наличием всего лишь одного ведомого звена и невозможностью обеспечения синхронных движений
звеньев в противоположных направлениях, объясняемой формой упругой пластины.
Цель изобретения - расширение эксплуатационных возможностей путем передачи синхронных движений в противоположных направлениях.
Указанная цель достигается тем, что в механизме поступательного дви10жения, содержащем неподвижную стойку, ведущее звено в виде ползуна, упругую пластину,шарнирно связывающую ползун со стойкой, и взаимодействующее с пластиной ведомое звено, плас15тина выполнена изогнутой предварительным натягом по синусоидальной кривой, а механизм снабжен дополнительными ведомыми звеньями в виде подпружиненных в направлении пластины толкате20лей, взаимодействующих с ней со стороны впадин.
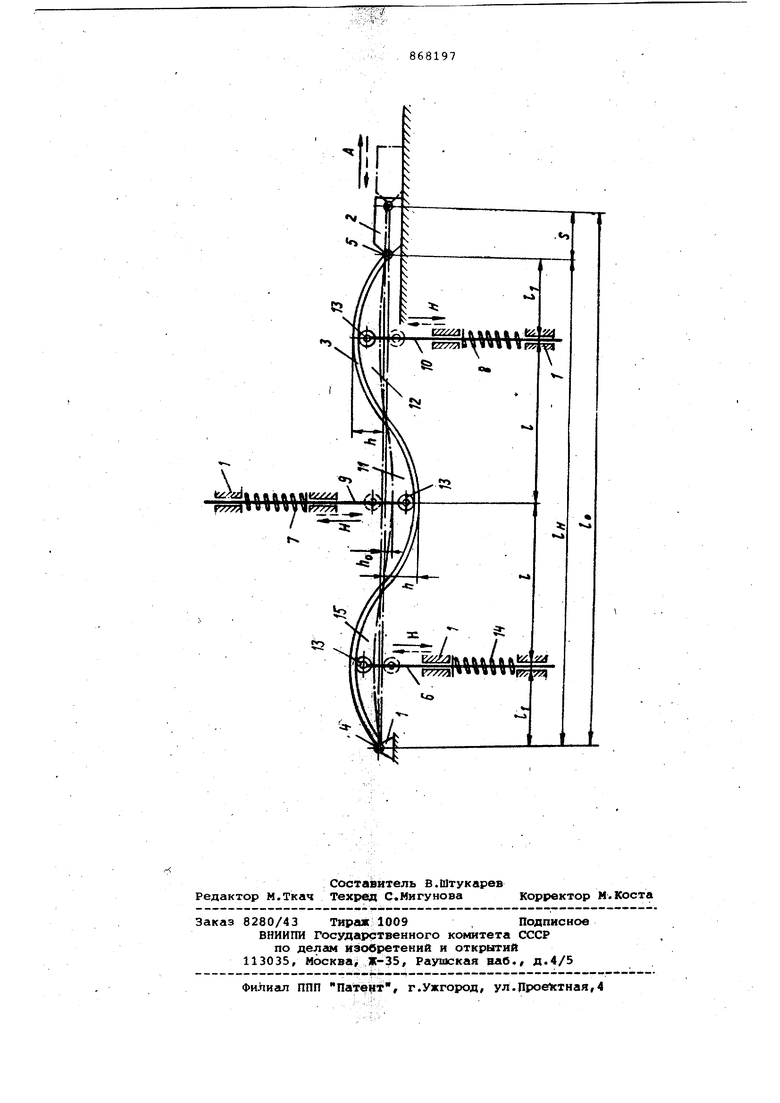
На чертеже изображен предлагаемый механизм в исходном и конечном, изображенном штрих-пунктирными линиями
25 положении, общий вид.
Механизм содерж.ит неподвижную . стойку 1, ведущее звено в виде ползуна 2, упругую пластину 3, шарнирно связывеиощую ползун 2 со стойкой 1 с помощью шарниров 4 и 5, и взаимодей30ствующее с п. астиной 3 ведомое звено в вид$ толкателя 6. Пластина 3 выполнена изогнутой предварительным натягом по синусоидальной,кривой, а механизм снабжен дополнительными ведомыми звеньями в виде подпружиненны с помощью упругих элементов 7 и 8 толкателей 9 и 10 соответственно, взаимодействующих с пластиной 3 со стороны впадин 11 и 12. На концах толкателей 6,9 и 10 установлены ролики 13. Ведомое звено в виде толкателя б подпружинено с помощью упругого элемента 14 в направлении пластины 3 и взаимодействует с ней со стороны впадины 15; Чи ело полуволн п синусоидальной форнЬл определяется критической силой по Лз условию устойчивости Эйлера F о где Во - длина пластины в свободном состоянии; FHP- критическая сила; ЕЗ - жесткость пластины; п - число полуволн синусоидаль ной формы. Устойчивые формы равновесия синусоидгшьно изогнутой пластины 3 обес печивают противоположно установленные толкатели 6,9 и 10 на расстоянии f друг от друга, равном длине полуволны синусоиды и на расстоянии Ъ -t/2 от шарниров 4 и 5. Сила упругих элементов 7,8 и 14 толкателей 6,9 и 10 обеспечивает предварительный про гиб пластины 3 по синусоиде с ампли тудой h в конечном положении ползу на 2 . Высота полуволны h синусоиды с вы сокой точностью определяется из изве стного соотношения между длиной дуг окружности Ед и длиной хорды I , на которую эта дуга опирается 1 TehiT + - , : За ход S ползуна 2 длина хорды равна . в S to- S I. ед - п - -VПодставляя значение t я 9 в уравнен(1в 11), определим высоту полувол ы, равную ходу ведомых звеньев 5(2 to- S) Механизм работает следующим образом. При движении ползуна 2 в направлении по стрелке А упругая пластина 3 выпрямляется и отжимает толкатели 6,9 и 10 в направлении по стрелке Н на величину h . Распо южение толкателей 6 , 9 и 10 во впадингис 11,. 12 и 15 синусоидально изогнутой пластины 3 обеспечивает их одновременное движение в противоположных направлениях. Остаточный прогиб по пластины 3 создает устойчивое положение синусоидального изгиба и исключает затраты механической энергии на сравнительно небольшой ход спрямления пластины 3., Механизм обратим. При ходе ползуна 2 в направлении к стойке 1 пластина 3, изгибаясь при сжатии, -отпускает толкатели 6, 9 и 10 навстречу друг другу. Ролики 13 обеспечивёцот трение качения в контакте с движущейся пластиной. Предлагаемый механизм обеспечивает передачу синхронных движений ведомых звеньев в противоположных направлениях. Формула изобретения Механизм поступательного движения, содержащий неподвижную стойку, ведущее звено в виде ползуна, упругую пластину, шарнирно связывающую ползун со стойкой, и взгшмодействующее с пластиной ведомое звено, о т л и ч аю щ и и с я тем, что, с целью расширения эксплуатационных возможностей путем передачи синхронных движений в противоположных направлениях, пластина выполнена изогнутой предварительным натягом по синусоидальной кривой, а механизм снабжен дополнительными ведомыг ш звеньями в виде подпружиненных в направлении пластины толкателей, взаимодействующих с ней со стороны впадин. Источники информации, принятые во внимание при экспертизе 1.Кожевников С.Н., Бмнеи.ко Я.И., Раскин Я.М. Механизмы. М.., Машиностроение, 1976, с.79, рис.2,68. 2.Авторское свидетельство СССР 693082, кл.Р 16 Н 21/04, 1979 (прототип).
