О 00
«Mf
Изобретение относится к измерительной технике и может быть использовано при измерении пространственного положения объекта в авиационной промыш- ленности, в машиностроении и робототехнике .
Целью изобретения является расширение функциональных возможностей путем измерения наряду с линейными nepe мещениями также и угла скручивания объекта.
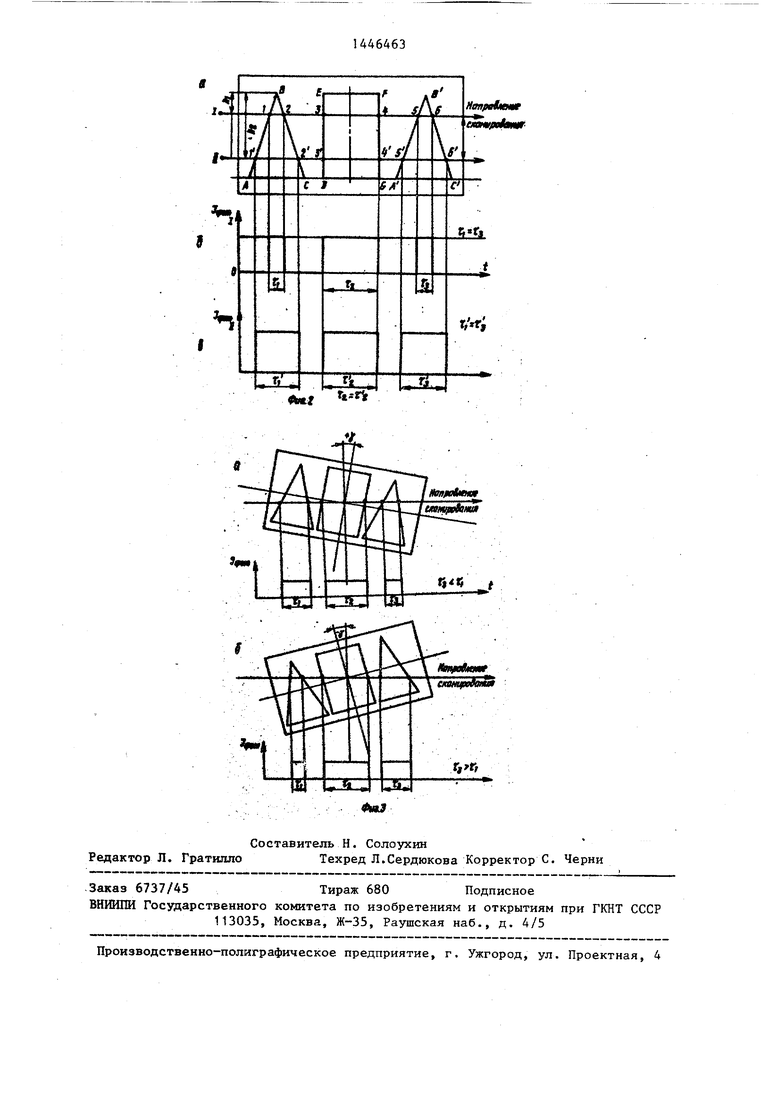
На фиг.1 приведена принципиальная схема устройства; на фиг. 2 - геометрческая схема трехэлементного фотоприемника и эпюры тока фотоприемника при различных взаимных положениях плоскости сканирования и фотоприемника; на фиг. 3 - геометрическая схема трехэлементного фотоприемника при раз- личных углах разворота фотоприемника относительно плоскости сканирования вокруг оси, перпендикулярной плоскости фотоприемника.
Устройство содержит источник 1 излучения, например лазер, коллима- тОр 2, зеркало 3, привод 4 вращения зеркала, фотоприемншс 5, выполиен- ный из трех чувствительных площадок, две из которых треугольного профиля а одна из них - прямоугольного, ры- числительный блок 6 и блок 7 индикации.
Зеркало 3 расположено под углом t к оси излучеиия источника 1 и оптически связывает его с фотоприемником 5.
Зеркала 3 вращается приводом 4 с постоянной угловой скоростью. Диаметр пучка излучения много меньше высоты площадок фотоприемника.
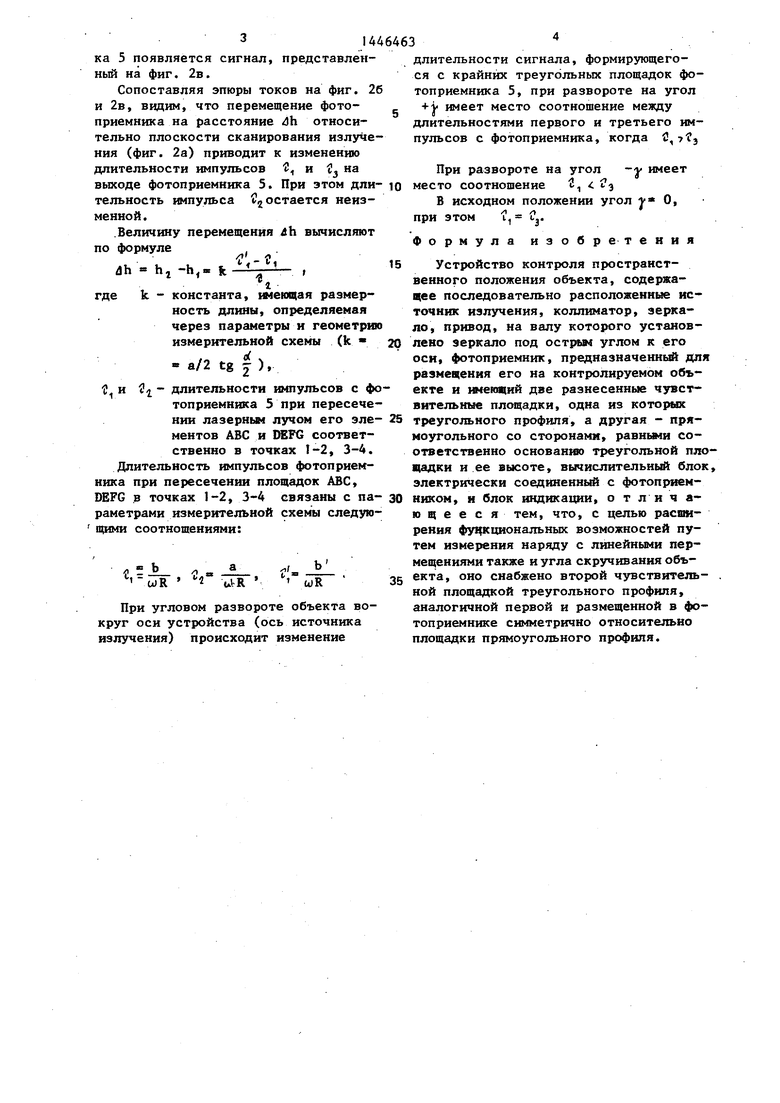
Фотоприемник 5 (фиг. 2) состоит из трех плоских фигур ABC, и DEFG и А В С. ЛАВС и ЛА В С - равные равнобедренные треугольники, DEFG - прямоугольник. При этом вьлолняется условие: АС А С DG а, высота треугольников и ABC и ДА В С равны DE, основаиия указанных треугольников и сторона DG прямоугольника DEFG лежат на одной прямой; треугольники ABC и А В С расположе- ны по обе стороны прямоугольника DEFG симметрично относительно оси, проходящей через середины его сторон EF и DG.
На фиг. 2 обозначены:
В - отрезок между точками 1 и 2; В - отрезок между точками 1 и 2 h, - высота треугольника- 1 В 2; hj - высота треугольника 1 В 2;
, 0 - угол i ABC;
R - расстояние от центра зеркала
до плоскости фотоприемника; U} - угловая скорость вращения зеркала;V - линейная скорость движения луч.а по фотоприемнику, 4h h-i-hi - перемещение фотоприемника относительно плоскости сканирования}
- длительность импульса фотопри- приемника при пересечении элемента ABC лазерным лучом в точках Г - 2 .
На фиг. 3 обозначены ±т угловой разворот объекта (угол сканирования) относительно оси устройства.
Устройство работает следующим образом.
Луч света, генерируемый лазером 1 проходит через коллиматор 2, попадает на вращающееся зеркало 3 и разворачивается им в плоскости со скоростью п об/мин. При своем движении по поверхности объекта, пространствен - ное положение которого контролируется, луч лазера последовательно пересекает элементы фотоприёмника 5, установленного на объекте. Электрический сигнал с фотоприемника 5 поступает на вход вычислительного блока 6, в котором происходит сравнение временных интервалов, а информация в пространственном положении объекта, содержащаяся в длительности сигналов с элементов фотоприемника (фиг.2), рбрабатьтается и поступает в блок 7 индикации.
Формирование сигнала на выходе фотоприемника 5 зависит от расположения фотЬприемника относительно плоскости сканирования.
Лазерный луч перемещают по фотоприемнику, в результате чего он последовательно пересекает его площадки ABC, DEFG, А В С соответственно в точках 1-2, 3-4, 5-6 (фиг. 2а). На выходе фотоприемника 5 формируется сигнал, показанный на фиг. 25.
При перемещении контролируемого объекта в плоскости, перпендикулярной плоскости сканирования излучения источника 1, площадки фотоприемника 5 перемещаются на одинаковые расстояния. Это приводит к тому, что ла- зерньй луч пересекает теперь площадки фотоприемника 5 в точках 1 -2 , 3-4, 5-6. На выходе фотоприемника 5 появляется сигнал, представленный на фиг. 2в.
Сопоставляя эпюры токов на фиг. 26 и 2в, видим, что перемещение фотоприемника на расстояние 4h относительно плоскости сканирования излучения (фиг. 2а) приводит к изменению длительности импульсов 1, и на выходе фотоприемника 5. При этом дли-
место соотношение
длительности сигнала, формирующегося с крайних треугольных площадок фотоприемника 5, при развороте на угол
+V имеет место соотношение между длительностями первого и третьего импульсов с фотоприемника, когда fl,
При развороте на угол -v имеет 57з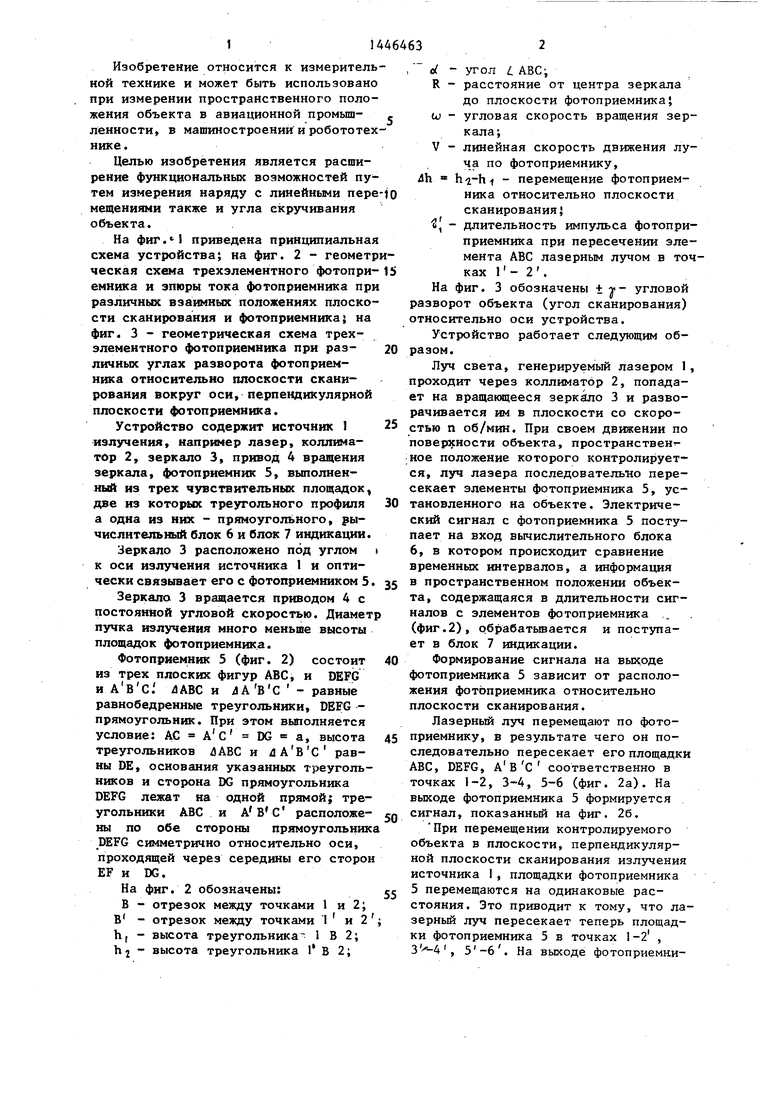
| название | год | авторы | номер документа |
|---|---|---|---|
| Сканирующий оптико-электронный датчик угла | 1988 |
|
SU1504503A1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2009 |
|
RU2408840C1 |
| Система импульсной лазерной локации | 2017 |
|
RU2660390C1 |
| Система импульсной лазерной локации | 2015 |
|
RU2612874C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТА С ПОМОЩЬЮ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМЫ И УГОЛКОВОГО ОТРАЖАТЕЛЯ | 2014 |
|
RU2556282C1 |
| СПОСОБ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ВЗАИМНЫХ ПЕРЕМЕЩЕНИЙ ТРЕХ ОБЪЕКТОВ В ТРЕХ УГЛОВЫХ КООРДИНАТАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2079103C1 |
| СПОСОБ ПОСТРОЕНИЯ ПРОФИЛЕЙ ТРЕХМЕРНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2091710C1 |
| ПРИБОР ДЛЯ ДНЕВНОГО И НОЧНОГО НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2006 |
|
RU2310219C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1990 |
|
RU2023238C1 |
Изобретение позволяет контролировать пространственное положение объекта. Цель изобретения расширение функциональных возможностей путем измерения также угла скручивания. Направляют излучение источника 1 на зеркало 3, вращаемое с постоянной угловой скоростью приводом 4. Отраженный от зеркала 3 пучок излучения, развертываемой им в горизонтальной плоскости, последовательно пересекает три светочувствительные площадки фотоприемника 5, центральная из которых имеет прямоугольную , две другие, с1В4метрично расположенные относительно нее, - треугольную . В вычислительном блоке 6 определяют длительность сигнала прохождения развертываемого излучения последовательно через все три площадки фотоприемника. По отношению длительности со всех трех площадок фотоприемника определяют линейное перемещение объекта-в плоскости, перпендикулярной плоскости сканирования, и угловой разворот объекта вокруг оси источника излучения (угол скручивания). Результаты вычисления вьшодят на блок индикации 7. 3 нп. (О с
остается неизтельность импульса менной.
.Величину перемещения лЬ вычисляют по формуле
dh hj k
i
- ti
-г.
k - константа, 1«епцая размерность длины, определяемая через параметры и геометрию измерительной схемы (k 20
- а/2 tg ).
и
1длительности импульсов с фотоприемника 5 при пересечеНИИ лазерню лучом его эле- 25 треугольного профиля, а другая - пряментов ABC и DEFG соответственно в точках 1-2, 3-А. Длительность импульсов фотоприемника при пересечении площадок ABC,
моугольного со сторонами, равнм и соответственно основанию треугольной пло цадки и ее высоте, вычислительный блок электрически соединенный с фотоприемDEFG в точках 1-2, 3-4 связаны с па- ЗО ником, я блок индикации, о т
раметрами измерительной схемы следующими соотношениями:
ю щ е е с я тем, что, с цель рения функциональных возможно тем измерения наряду с линейн мещениями также и угла скручива екта, оно снабжено второй чув ной площадкой треугольного пр аналогичной первой и размещен топриемнике симметрично относ площадки прямоугольного профи
.
uVR
Ъ
ыК
При угловом развороте объекта вокруг оси устройства (ось источника излучения) происходит изменение
В исходном положении угол ) О,
J ж
при этом 1 Формула
3- изобретения
Устройство контроля пространственного положения объекта, содержащее последовательно расположенные источник излучения, коллиматор, зеркало, привод, на валу которого установлено эеркало под острьм углом к его оси, фотоприемник, предназначенный для размещения его на контролируемом объекте и нмеющий две разнесенные чзпвст- вительные площадки, одна из которых
моугольного со сторонами, равнм и соответственно основанию треугольной пло- цадки и ее высоте, вычислительный блок, электрически соединенный с фотоприемником, я блок индикации, о т
л и ч аю щ е е с я тем, что, с целью расширения функциональных возможностей путем измерения наряду с линейньми пер- мещениями также и угла скручивания объекта, оно снабжено второй чувствительной площадкой треугольного профиля, аналогичной первой и размещенной в фотоприемнике симметрично относительно площадки прямоугольного профиля.
| Technocrat, 7,11, 1974, с | |||
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
