Изобретение относится к контрольно-измерительной и локационной технике, а точнее к дистанционному определению пространственной ориентации объекта, и может быть использовано в устройствах ввода информации, робототехнике, системах позиционирования, навигации и стыковки.
Один из способов дистанционного определения ориентации объекта в пространстве описан в патенте US 7312862 B2, от 25.12.2007, G01B 11/26. В нем с помощью измерительной системы определяют шесть степеней свободы объекта по жестко закрепленному на нем блоку, содержащему уголковый отражатель. Три степени свободы, задающие положение объекта в пространстве, находят как расстояние до вершины уголкового отражателя и два угла направления на нее. Эти величины измеряют при помощи лазерного трекера или другого функционально аналогичного ему устройства. Три оставшиеся степени свободы, определяющие ориентацию объекта в пространстве, задают двумя коллимационными углами и углом скручивания. Для их измерения в блоке уголкового отражателя располагают матричное фотоприемное устройство (МФПУ), а вершину уголкового отражателя выполняют в виде апертуры, пропускающей излучение параллельно падающему на нее световому потоку. Регистрация МФПУ пропущенного апертурой излучения позволяет определить коллимационные углы разворота объекта; для измерения угла скручивания уголковый отражатель снабжают меткой или используют дополнительный источник света, излучение которого также фиксируется МФПУ.
Недостатками такого решения являются низкая надежность системы и ограниченный диапазон допустимых условий ее эксплуатации.
Наиболее близким по технической сущности к изобретению является способ определения пространственного положения объекта с помощью оптико-электронной системы (ОЭС) и уголкового отражателя, описанный в патенте US 7800758 B1, от 21.09.2010, G01B 9/02, и выбранный в качестве прототипа. В известном способе ориентация объекта в пространстве задается тремя сферическими координатами, которыми являются расстояние до уголкового отражателя и два угла направления на него. Определяются эти величины с помощью лазерного трекера. Тремя степенями свободы, определяющими ориентацию объекта в пространстве, являются углы последовательного разворота уголкового отражателя вокруг трех взаимно перпендикулярных осей. Для определения данных углов используют уголковый отражатель, который жестко закрепляют на объекте, затем освещают направленным вдоль линии визирования лазерным (световым) лучом, выходящим из сканирующего модуля, оптически связанного с неподвижным источником излучения оптико-волоконным жгутом, при этом часть светового потока, возвращаемого уголковым отражателем, направляют в оптическую систему с постоянным увеличением, формирующую на расположенном за ней МФПУ распределение интенсивности светового потока в районе вершины уголкового отражателя. Из-за погрешностей изготовления грани уголкового отражателя имеют меньшую отражательную способность в районе ребер, где они образуют стыки. При необходимости этот эффект может быть дополнительно усилен, например, с помощью увеличения толщины стыков или их затемнения. Поэтому изображение уголкового отражателя, сформированное в результате проецирования светового потока на поверхность светочувствительных элементов МФПУ, имеет вид трех темных линий, соответствующих его ребрам. По полученному изображению, а точнее по наклонам темных линий, в результате решения системы уравнений определяют величины углов последовательного разворота уголкового отражателя вокруг трех взаимно перпендикулярных осей, задающие пространственную ориентацию объекта. Само по себе распределение света на МФПУ не позволяет установить взаимно однозначное соответствие между темными линиями и ребрами уголкового отражателя. Это соответствие может быть установлено с помощью дополнительных мер, например, закрепления на уголковом отражателе метки. В противном случае ориентация объекта в пространстве определяется с точностью до угла скручивания, равного 120°.
Недостатком прототипа является ограничение функциональных возможностей по определению пространственной ориентации объектов, расположенных в широком диапазоне расстояний, в силу направления части светового потока, возвращаемого уголковым отражателем в оптическую систему с постоянным увеличением, кроме того, использование оптической системы с постоянным увеличением требует ее фокусировки в процессе измерения, что значительно усложняет данный способ определения ориентации.
Задачей, на решение которой направлено заявляемое изобретение, является совершенствование дистанционного измерения степеней свободы объекта, определяющих его ориентацию в пространстве, с помощью ОЭС и уголкового отражателя.
Данная задача решается за счет того, что в известном способе уголковый отражатель жестко закрепляют на объекте, его входную грань освещают световым лучом вдоль линии визирования, отраженный световой луч с помощью объектива ОЭС проецируют на фоточувствительный слой МФПУ для формирования изображения уголкового отражателя, по которому определяют пространственную ориентацию объекта в виде углов последовательного разворота уголкового отражателя относительно трех взаимно перпендикулярных осей, при этом входную грань уголкового отражателя освещают световым лучом, проходящим через ограничивающую пропускание входной грани диафрагму, периметр которой не переходит в себя при развороте на угол 180°, отраженный световой луч с помощью объектива ОЭС проецируют на фоточувствительный слой МФПУ полностью, а пространственную ориентацию объекта определяют по форме периметра изображения уголкового отражателя.
Технический результат, обеспечиваемый приведенной совокупностью признаков, заключается в расширении функциональных возможностей определения пространственной ориентации объектов, расположенных в широком диапазоне расстояний.
Сущность изобретения поясняется следующими чертежами:
на фиг.1 изображено устройство реализации заявленного способа;
на фиг.2 дана схема устройства измерения ориентации;
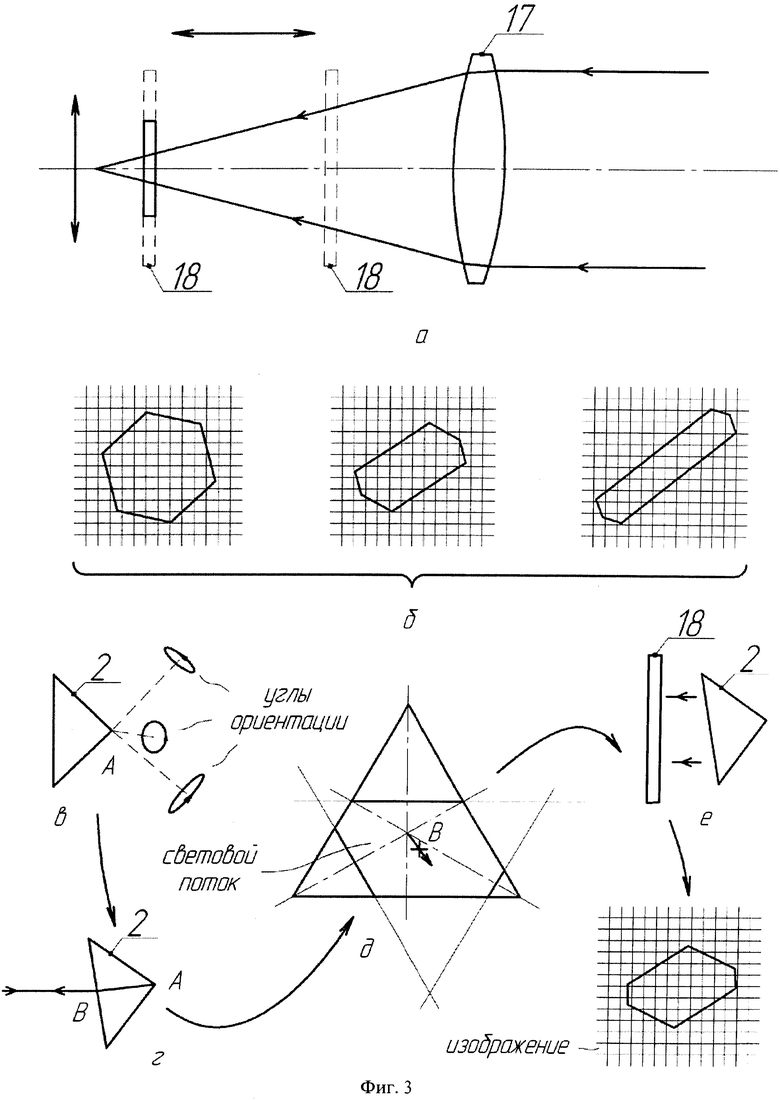
на фиг.3а представлена схема формирования пучка лучей в плоскости приемника;
на фиг.3б приведены примеры изображений с указанием пикселей фотоприемника;
на фиг.3в-3е проиллюстрировано формирование изображения уголкового отражателя на МФПУ;
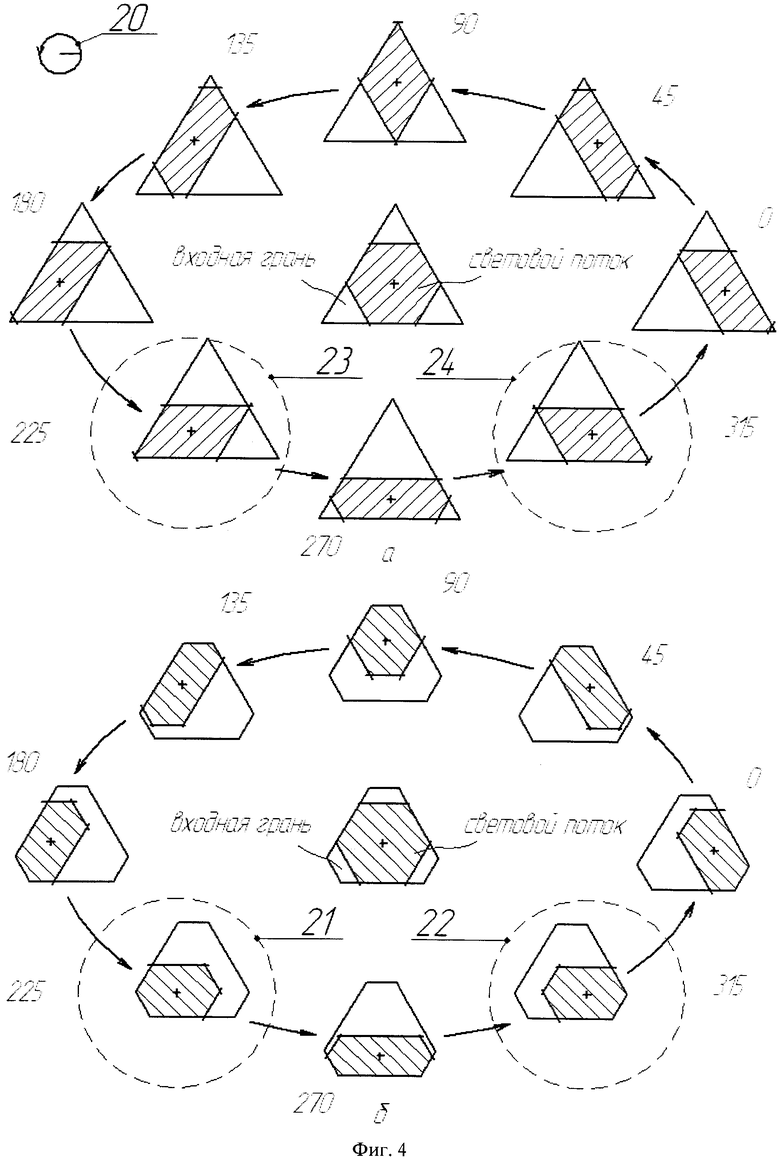
на фиг.4а продемонстрировано соответствие формы поперечного сечения светового пучка, падающего на входную грань уголкового отражателя, каждому набору углов его ориентации;
на фиг.4б показано изменение форм поперечного сечения светового пучка при различных углах ориентации уголкового отражателя;
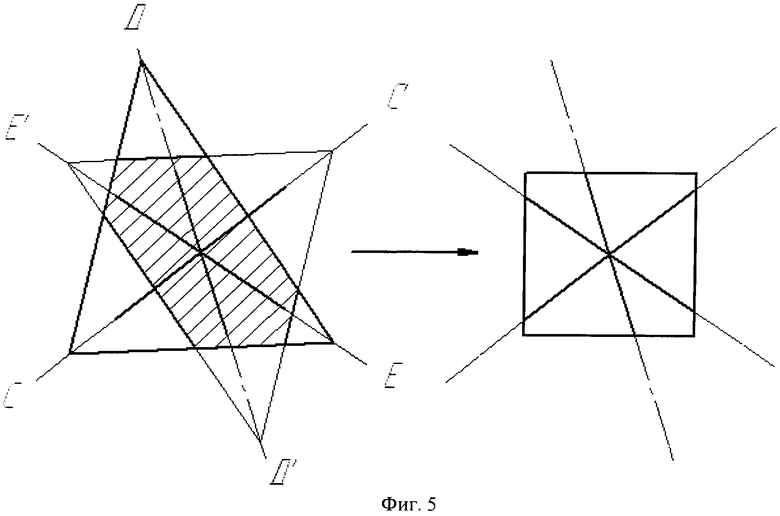
на фиг.5 пояснен способ восстановления углов разворота уголкового отражателя по его изображению на МФПУ.
Заявленный способ определения пространственной ориентации объекта (см. фиг.1) реализован устройством 1, представляющим собой ОЭС, предназначенную для работы с уголковым отражателем 2, жестко закрепленным на объекте. Это устройство позволяет измерять вплоть до шести степеней свободы в собственной системе координат XYZ. Уголковый отражатель 2 выполнен, например, в виде правильной трехгранной пирамиды, боковые грани которой имеют форму треугольника с углом при вершине пирамиды 90°, с нанесенной на ее основание диафрагмой (на чертеже не показана), периметр которой не переходит в себя при развороте на угол 180° (например, такая диафрагма может иметь форму треугольника). В качестве объекта 3 изображен джойстик, который разворачивается на некоторые углы (углы ориентации) вокруг трех взаимно перпендикулярных осей, проходящих через вершину A отражателя 2, при этом сама вершина A отражателя 2 может перемещаться в пространстве как A→А' по траектории Б. Устройство 1 включает блок ориентации 4 и может включать блок измерения дальности 5, светоделители 6, 7 и блок позиционирования 8, управляющий сканирующим зеркалом 9, отрабатывающим углы рассогласования линии визирования (ЛВ) с помощью приводов, снабженных азимутальным 10 и угломестным 11 датчиками «угол-код», управляемых блоком позиционирования 8, вырабатывающим сигнал отработки угла рассогласования ЛВ.
На фиг.2 приведена схема блока ориентации 4, состоящего из блока излучателя 12, содержащего источник излучения 13 и коллиматор 14, светоделителя 15, блока приемника излучения 16, включающего оптическую систему 17, фокусирующую падающий на нее параллельный пучок лучей, и МФПУ 18, а также блок управления и обработки 19, вычисляющий углы ориентации объекта 3, соединенный входом с выходом блока приемника излучения 16, а выходом - с исполнительным устройством.
Принцип формирования изображения в блоке ориентации 4 (фиг.3) и определения по форме периметра изображения уголкового отражателя пространственной ориентации объекта (фиг.4а, б) будет описан ниже.
Заявленный способ функционирует следующим образом.
Блок 4 определяет ориентацию объекта 3. Выходящий из блока 4 параллельный световой пучок, сформированный источником излучения 13 (светодиодом или лазерным диодом), коллиматором 14 и отраженный светоделителем 15, проходит через светоделитель 6, после чего, смешиваясь с пучком, выходящим из блока измерения дальности 5, пропускается светоделителем 7, попадает на сканирующее зеркало 9, отражается от его поверхности и проходит через входное окно устройства 1 в направлении уголкового отражателя 2. По достижении последнего световой пучок отражается в обратном направлении, проникает через входное окно устройства 1 и, отразившись от сканирующего зеркала 9, попадает на светоделитель 7, где разделяется на две составляющие - прошедший пучок и отразившийся, поступающий в блок позиционирования 8. В блоке позиционирования 8 по смещению изображения светового пучка, возвращенного уголковым отражателем, относительно положения пучка, испускаемого блоком 5, вырабатывается сигнал рассогласования ЛВ для угломестного и азимутального приводов, на валах которых установлены соответствующие датчики «угол-код» 11 и 10. С помощью приводов осуществляют позиционирование сканирующего зеркала 9 так, что ЛВ устройства 1, совмещенную с излучаемым пучком, направляют точно на вершину уголкового отражателя 2. Таким образом, блок позиционирования позволяет отслеживать перемещение вершины А→А′ уголкового отражателя 2 в пространстве по траектории Б и определять углы направления ЛВ на его вершину А. Возвращенный световой пучок, прошедший светоделитель 7, попадает на светоделитель 6, где разделяется на прошедший и отраженный пучки. Последний из них направляется в блок измерения дальности 5, определяющий расстояние до вершины А уголкового отражателя 2 одним из способов, описанных в известных источниках (см., например, патент US 7800758 B1 и содержащиеся в нем ссылки).
Таким образом, с помощью найденных углов направления на вершину А уголкового отражателя и дальности до нее определяют положение вершины А в пространстве. Ориентацию объекта в пространстве определяют по изображению уголкового отражателя 2, формируемого в блоке ориентации 4 возвращенным световым пучком, прошедшим светоделитель 6.
Принцип формирования изображения уголкового отражателя 2 на матричном фотоприемнике 18 блока 16 ОЭС 1 представлен на фиг.3. Блок приемника излучения 16 устроен таким образом, что его оптическая система 17 фокусирует попадающий в нее возвращенный параллельный пучок лучей, прошедший светоделитель 15, в плоскость, не совпадающую с плоскостью светочувствительной поверхности матричного приемника излучения. Из соображений уменьшения габаритов приемника предпочтительно, чтобы этот пучок фокусировался за плоскость приемника, как это показано на фиг.3а. Расстояние между плоскостью фокусировки и плоскостью приемника определяет размер изображения уголкового отражателя. Также как размер самого приемника 18 это расстояние может изменяться в широких пределах в зависимости от требований к точности измерений и мощности источника излучения.
Диаметр D входного зрачка блока 16 ОЭС 1 выбирается из условия D≥l, где l - максимальное расстояние между двумя точками периметра диафрагмы входной грани уголкового отражателя, заметим, что если применять заявленный способ для расходящихся пучков лучей:
- световой поток блока излучателя 12, отраженный от светоделителя 15;
- возвращенный световой поток, прошедший светоделитель 6;
- прямой световой поток, прошедший светоделитель 6,
то данное условие переходит в условие D≥2·l. При таком выборе входного зрачка изображение уголкового отражателя на матричном фотоприемнике меняется в зависимости от углов его разворота, примеры изображений с указанием пикселей фотоприемника приведены на фиг.3б. Расстояние между плоскостью фокусировки и плоскостью фотоприемника устанавливается таким образом, чтобы обеспечить возможность распознавания формы изображения для любых углов разворота уголкового отражателя. Как правило, для этого достаточно, чтобы максимальное расстояние между различными точками изображения было не менее 10-15 пикселей. При увеличении этого расстояния точность распознавания формы изображения и, следовательно, всего способа увеличивается.
Фиг.3в-е поясняют, как формируется изображение уголкового отражателя 2 в результате проецирования с помощью ОЭС отраженного от него светового пучка на матричном фотоприемнике 18. Пусть уголковый отражатель, входная грань которого имеет форму равностороннего треугольника, последовательно разворачивается на некоторые углы вокруг трех взаимно перпендикулярных осей (фиг.3в). При этом пересечение оси луча, попадающего в вершину уголкового отражателя, переходит из ортоцентра входной грани в некоторую точку B, смотри фиг.3г, д. Расположение точки В на входной грани зависит от углов разворота уголкового отражателя и его исполнения. Форма светового потока, возвращаемого уголковым отражателем, в плоскости его входной грани определяется точкой B следующим образом. Необходимо развернуть равносторонний треугольник, ограничивающий пропускание входной грани, на 180°, а затем переместить полученный развернутый треугольник так, чтобы его ортоцентр занял положение, симметричное исходному относительно точки В, смотри фиг.3д. Световой поток, возвращаемый уголковым отражателем, в плоскости входной грани имеет форму пересечения развернутого и перемещенного равностороннего треугольника с исходным. Плоскость входной грани уголкового отражателя при его развороте имеет некоторый наклон относительно плоскости приемника излучения, фиг.3е. Поэтому окончательное изображение уголкового отражателя определяется путем проекции формы светового потока, найденной так, как это показано на фиг.3д, на плоскость матричного приемника излучения 18 с последующим масштабированием до нужного размера.
Для работы заявленного способа необходимо, чтобы периметр диафрагмы, ограничивающей входную грань уголкового отражателя, не переходил в себя при развороте на 180°. Из всего многообразия диафрагм, отвечающих данному условию, целесообразно выделить, с одной стороны, наиболее технологичные для изготовления и применения и, с другой стороны, наиболее простые с точки зрения распознавания. Две такие диафрагмы показаны на фиг.4. Первая из них имеет форму равностороннего треугольника. Именно такую форму имеет входная грань уголкового отражателя, изготовленного в чистом виде без каких-либо доработок, направленных на уменьшение его габаритов. Фиг.4а показывает, каким образом меняется форма возвращаемого светового потока в плоскости входной грани уголкового отражателя, имеющей форму равностороннего треугольника. В центре фиг.4а изображена сама входная грань (равносторонний треугольник) и форма возвращаемого светового потока через нее (заштрихованный шестиугольник) при отсутствии углов разворота уголкового отражателя. Вокруг центрального изображения расположены формы возвращаемого светового потока для углов разворота уголкового отражателя, схематично представленных схемой 20 в левом верхнем углу фиг.4. Радиус окружности, показанной на схеме 20, задает величину смещения при данных углах разворота точки пересечения луча, попадающего в вершину уголкового отражателя, со входной гранью. Направление отрезка задает направление смещения для изображения 0, расположенного на фиг.4а справа от центрального. Остальные изображения соответствуют повороту отрезка на схеме 20 против часовой стрелки с дискретностью 45° на углы 45°, 90°,…, 315° соответственно. Фиг.4а демонстрирует, что каждому набору углов ориентации уголкового отражателя соответствует своя форма возвращаемого светового потока через его входную грань и, следовательно, свое изображение на матричном фотоприемнике 18. Таким образом, углы ориентации уголкового отражателя могут быть восстановлены по его изображению. Заметим, что углы ориентации восстанавливаются с точностью до угла скручивания 120°.
Фиг.4б демонстрирует изменение форм возвращаемого светового потока при различных углах ориентации уголкового отражателя, пропускание входной грани которого ограничено шестиугольником, получающимся из равностороннего треугольника, путем усечения его вершин. Периметр такой диафрагмы также не переходит в себя при развороте на 180° и получается естественным образом, если использовать усеченные части равностороннего треугольника для крепления уголкового отражателя. Расположение изображений на фиг.4б такое же, как на фиг.4а. Фиг.4б показывает, что чем сильнее усекаются вершины равностороннего треугольника, тем уже диапазон определяемых углов ориентации. Так, например, изображения 21 и 22 на фиг.4б, соответствующие положениям 225° и 315° на схеме 20, визуально практически неразличимы. В то же время, изображения 23 и 24 на фиг.4а, соответствующие тем же положениям 225° и 315° на схеме 20, хорошо различимы даже на глаз. Заметим, что данное ограничение по диапазону определяемых углов, также как и ограничение, состоящее в том, что заявленный способ определяет ориентацию объекта с точностью до угла скручивания 120°, могут быть устранены введением в блок уголкового отражателя дополнительных меток, что известно в общедоступных источниках, например патентах US 7312862 B2 и US 7800758 B1.
Восстановление углов ориентации уголкового отражателя по его изображению на МФПУ производят, например, как это показано на фиг.5. Сначала детектируются все ребра изображения, составляющие его периметр. Затем эти ребра разбиваются на две группы, таким образом, чтобы ребра, входящие в каждую из групп, не имели общих точек. По пересечениям прямых, задаваемых ребрами каждой группы, находят соответственно точки С, Д, Е и С', Д', Е'. При этом линии СС', ДД', ЕЕ' образуют в районе точки их пересечения точно такую же конфигурацию, как линии, по которым определяется ориентация уголкового отражателя в патенте US 7800758 B1. Зависимость наклонов линий СС', ДД', ЕЕ' от углов ориентации уголкового отражателя определяется системой уравнений, приведенной в US 7800758 B1. Решая данную систему, находят углы ориентации уголкового отражателя 2 и объекта 3 в пространстве.
Дополняя данные блока 4 об ориентации объекта в пространстве данными о дальности блока 5 и данными об углах направления блока 8, находят вплоть до шести степеней свободы объекта, на котором закреплен уголковый отражатель. Предлагаемое изобретение позволяет определять ориентацию объекта более простым способом, в более сложных условиях эксплуатации, в значительно более широком диапазоне расстояний.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ОБЪЕКТА С ПОМОЩЬЮ ОПТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2638876C1 |
| УГЛОИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2013 |
|
RU2554599C1 |
| УГЛОИЗМЕРИТЕЛЬНЫЙ ЗВЕЗДНЫЙ ПРИБОР | 2009 |
|
RU2399871C1 |
| Углоизмерительный прибор | 2018 |
|
RU2682842C1 |
| ДАТЧИК УГЛА ПОВОРОТА | 2024 |
|
RU2829832C1 |
| ДАТЧИК УГЛА ПОВОРОТА | 2017 |
|
RU2644994C1 |
| УГЛОИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2013 |
|
RU2525652C1 |
| СПОСОБ ИНТЕРФЕРЕНЦИОННОЙ МИКРОСКОПИИ | 2013 |
|
RU2536764C1 |
| Устройство для измерения угловых перемещений | 1982 |
|
SU1024707A1 |
| Датчик угла скручивания | 1990 |
|
SU1776989A1 |

Изобретение относится к дистанционному определению пространственной ориентации объекта. В способе определения пространственной ориентации объекта с помощью оптико-электронной системы уголковый отражатель жестко закрепляют на объекте, его входную грань освещают световым лучом вдоль линии визирования. При этом отраженный световой луч с помощью объектива ОЭС проецируют на фоточувствительный слой МФПУ для формирования изображения уголкового отражателя, по которому определяют пространственную ориентацию объекта в виде углов последовательного разворота уголкового отражателя относительно трех взаимно перпендикулярных осей. Кроме того, входную грань уголкового отражателя освещают световым лучом, проходящим через ограничивающую пропускание входной грани диафрагму, периметр которой не переходит в себя при развороте на угол 180°, отраженный световой луч с помощью объектива ОЭС проецируют на фоточувствительный слой МФПУ полностью, а пространственную ориентацию объекта определяют по форме периметра изображения уголкового отражателя. Технический результат - расширение функциональных возможностей определения пространственной ориентации объектов, расположенных в широком диапазоне расстояний. 5 ил.
Способ определения пространственной ориентации объекта с помощью оптико-электронной системы (ОЭС) и уголкового отражателя, заключающийся в том, что:
- уголковый отражатель жестко закрепляют на объекте,
- входную грань уголкового отражателя освещают вдоль линии визирования,
- отраженный световой луч с помощью объектива ОЭС проецируют на фоточувствительный слой многоплощадочного фотоприемного устройства (МФПУ) для формирования изображения уголкового отражателя,
пространственную ориентацию объекта в виде углов последовательного разворота уголкового отражателя относительно трех взаимно перпендикулярных осей определяют по изображению уголкового отражателя на МФПУ, отличающийся тем, что
- входную грань уголкового отражателя освещают таким образом, чтобы в световой луч полностью попала ограничивающая пропускание входной грани диафрагма, периметр которой не переходит в себя при развороте на угол 180°,
- отраженный световой луч с помощью объектива ОЭС проецируют на фоточувствительный слой МФПУ полностью,
- а пространственную ориентацию объекта в виде углов разворота уголкового отражателя определяют по форме периметра изображения уголкового отражателя.
| RU 2002131433 A, 27.05.2004 | |||
| US 20130155386 A1, 20.05.2003 | |||
| WO 2012112388 A1, 23.08.2012 | |||
| DE 4136300 C1, 25.02.1993 |

