О)
а
о
Изобретеиме отиоентся к области систег автома-ги-ческого регулирова- ты с бескоитактпыш двигателяюг
t.
постоянного тока н нелипей шми кор- ре1хтиру1ощнмн устройствакя и .может быть использовано ь следяи(нк эдек- трснривсдак станков с ЧПУ и промг цг- лантйш: роботов,, .
11,е,пью кзобретешуг является :;jc:iJi:i-- mejme динаг-ишеской точности.
Па фиг, показана функциональная схема cJie.iT.quiero электропривода; гга, ШКГ.2 - фазовый портрет системы; иа фиГеЗ перскодн ые процессы в следк-- щем электроярявсде.
Следящ.нн электропривод Bi;juo4aei в себя HswepnTGJih 1 рассогласопапи., 1феднарителы1г в1 успн ткпь 2., псч вьп .л-1техгь 3 5 сумг- атор , широт-тго- пмпул}и;11Ь Й ;oдyл.nop (HiiiMJ 5, бес-- коитакп кй двигатель 6 л стоянного тока ()з редукчор 7, т:врвым i-paБторой вьпгрпмитель 10, фаяоо1;срс- ,fi фильтр 1 ,, pt;jie 12 pe : ica, первьм блок 13 умг1оже 1ил, циатор tj iiepijbtn ролейгплй эл;;--: --т 15 HTOiJon олок в ум голсепн51, о, .но-- полярное р1;лс:; 17., третл.й блок ic лчг ыожения лсрвья -сллитель 19, .:;А О;Н);
1 ход JV IIIT 6 Па второй фазовый вход БД;Г.Г Ь через НМЛ 5 поступает управ- ляющее напрг. жение Ujj. Oj которое форгч1ируется па вькоде сумматора 4j на первый вход сумматора 4 поступает напр.шкение Uy с выхода выпря1 ителя 3 к. Па второй вход сзт-гматора 4 через второй выпрямитель 10 поступает выходное напряжещ .е интегратрра 9, ко™ торый с помощью nepooi o срашшваю- щег о элемента 8 первого усилителя 19 и третьегчо блока 18 умножения ох- ватываетея отрицательной обратной связью, коммутируемо} но нелинейному затгону, который формируется с помощью одног1О 1Я1МЮ1 о реле 17. блока 16 ум- 1юл;еи 1я, други; i;e;iejiHbix элементов 15 и 21, в7. ус теите„-ш 20 и priro срал 11пва1 71цего э.лемента 22,
(лел,яи1т злект) (фиг,) яв.1)яется огстемой с перемен;юй струк турой, В качестве осей фазов.ых коор- выберем к Up t у - - U.; ;
X (фиг,2)„ ди амика
3 л е .;.; j. p оприв од а о л не ыв а е т ся нели ней пой С 1C темой дчффе.ренциальш;.1х уравне-
(1)
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Следящая система | 1986 |
|
SU1352451A1 |
| Следящая система | 1987 |
|
SU1425595A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2013 |
|
RU2522858C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2013 |
|
RU2522857C1 |
| Самонастраивающийся электропривод робота | 1988 |
|
SU1618643A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523187C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2396586C1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ | 2010 |
|
RU2453891C1 |

Изобретение относится к системам автоматического регулирования с бесконтактными двигателями постояй- иого тока и нелинейными корректирую- щими устройствами и может быть использовано в следящих электроприводах станков с ЧПУ и промьшшенных роботов. Целью изобретения является повышение динамической точности. Сущность изобретения состоит в форп мировйшш нелинейного закона коммутации отрицательной обратной связи, через усилитель 19 охватывающей интегратор 9. Коммутация данной обратной связи осуществляется при противоположных знаках сигналов на выходах интегратора 9 и сравнивающего элемента 22. Тем самым формируется дополнительная плоскость переключения., Выпрямленный сигнал интегратора подключается к контуру cиcтe ы без дополнительных коммутаций, 3 ил. (Л
т 21 и BTOpoii сравни;;акаций ;л:тсг- т 22,
11ри :л .|.Ч: следующие .я;
. 9 в:кo,нoй и Бькодной ут ль) 1 рйссоглассватлхе мажд:у
ЗЛУП-
и,, вьжоднсе .;i ejuin
лредва лгтельиого ycjfjiiv- и fba.3Ooricce;KajU Fhi4: ф.
IJ; - 13з:од ое и выходиое ряжстгил плтегратора.|
и,1. - з апряжение ла входе
1МРОТ1 О ИМПУЛЬСНОГ О
кодугятора ,
e
u,,.
11змери7 ель 1 ра.ссогзтз.с.овання определяет величину рассогласонания 6 8;™ GO кежду ЗлОД1яъ;м и йьсюддым углами усгпишаемую ПУ 2, БЬ ходлое напряжение U которого через фазсг- опере ка1ж ий фшхьтр 11 и реле 12 верса определяет знак напряжения. поступагогцего на ггервый управляющий
k-M,., n
4y
)
л1,
5
k
M,
где Т
™ козф ф11П,нент nepe.natjH интегратора 9;
коэффициент ус тения кон- т зфа комг-гутируемой обратит пой связи, охватывакщей интегратор 9;
-электрокеханичес:кая постоянная времени БДПТ 6|
-обоц-ш коэффициент передачи электропривода; - .
коэффициент передачи по
моменту нагрузки - момент нагрузки.
I т V - к
(2)
, постоя;1иая времени фазо- опережающего ф}шьтра 11,
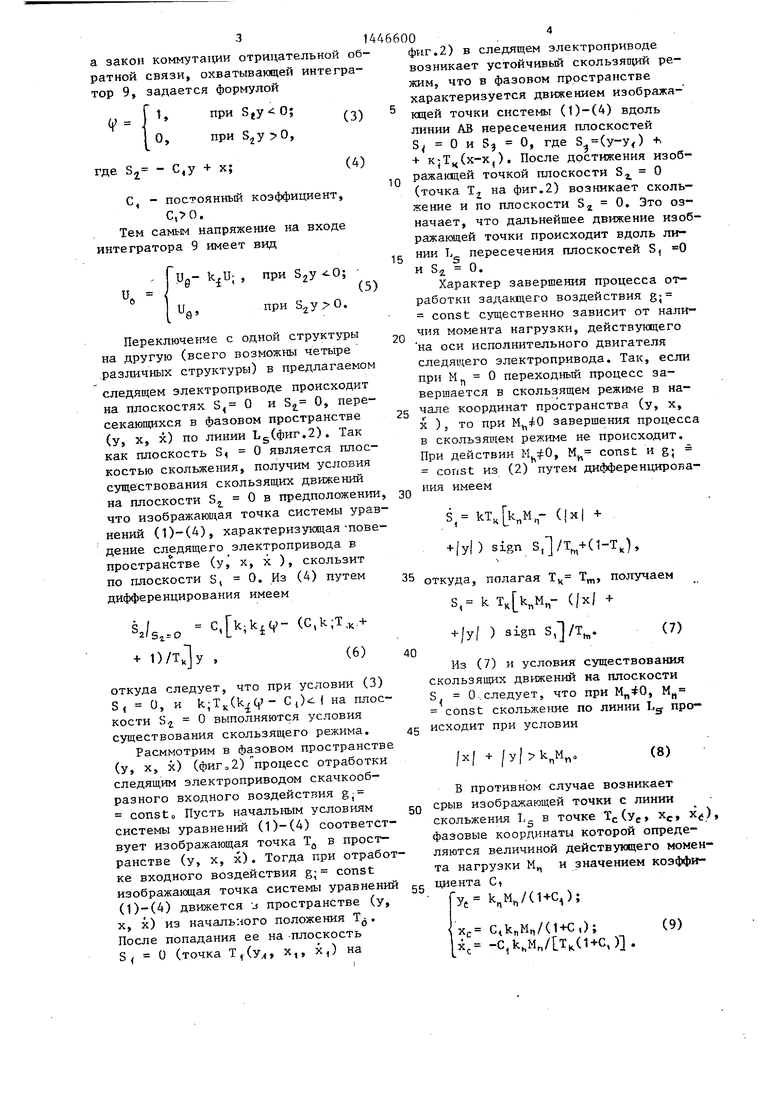
а закон коммутации отрицательной обратной связи, охватывающей интегратор 9, задается формулой
t, О,
при Sjy О; при 0,
где S - С,у + х;(4)
С, - постоянньй коэффициент,
С,0.
Тем самым напряжение на входе интегратора 9 имеет вид
U0- ,
и„.
при 52У при .
Переключение с одной структуры на другую (всего возможны четыре .различ№1Х структуры) в предлагаемом следящем электроприводе происходит на плоскостях S, О и Sg О, пересекающихся в фазовом пространстве (у, X, х) по линии Ъ5(фиг,2). Так как плоскость S, О является плоскостью скольжения, получим условия существования скользящих движений на плоскости S О в предположении что изобража1ш;ая точка системы уравнений (1)-(4), характеризукщая-поведение следящего электропривода в пространстве (у, х, х ), скользит по плоскости S, 0. Из (4) путем дифференцирования имеем
2/5.0 C, (C,k;T,X
+ 1) ,(6)
откуда следует, что при условии (3) S, О, и k;T(k.{,;- С,)| на плоскости S. О выполняются условия существования скользящего режима.
Расммотрим в фазовом пространств (у, X, х) (фиго 2) процесс отработки следящим электроприводом скачкообразного входного воздействия gj const о Пусть начальным условиям системы уравнений (1)-(4) соответствует изображающая точка Т в пространстве (у, X, х). Тогда при отрабоке входного воздействия g; const изображающая точка системы уравнени (1)-(4) движется -j пространстве (у, X, х) из начального положения Т. После попадания ее на -плоскость S( О (точка Т,(у, X,, х,) на
оба3)
(4)
(5)
10
20
ы мом ит реек осияй нии, зо равоветм
фиг.2) в следящем электроприводе возникает устойчивый скользяпу й режим, что в фазовом пространстве характеризуется движением изобража- ющей точки системы (1)-(4) вдоль линии АВ пересечения плоскостей 5 О и S, О, где S (y-y) -к + к;Т(х-х,), После достижения изоб- ражакщей точкой плоскости S О (точка Tj на фиг.2) возникает скольжение и по плоскости S 0. Это означает, что дальнейшее движение изоб- ражакмдей точки происходит вдоль НИИ L пересечения плоскостей S, 0 и Sj. 0.
Характер завершения процесса отработки задакщего воздействия g- const существенно зависит от наличия момента нагрузки, действующего на оси исполнительного двигателя следящего электропривода. Так, если при М О переходный процесс завершается в скользящем режиме в на25 чале координат пространства (у, х, X ), то при М, завершения процесса в скользящем режиме не происходит. При действии М,,0, М const и g; const из (2) путем дифференцирования имеем
S, kT, (JH| +
+ |у|) sign S,(1-TJ,
откуда, полагая Тц Т„, получаем S, k T, (|х/ +
+ |у ) sign S,/T. (7)
Из (7) и условия существования скользяир х движений на плоскости S О .следует, что при , M const скольжение по линии Ь„ про-
45 исходит при условии
|х| + /yj
(8)
В противном случае возникает срыв изображающей точки с линии скольжения Lg в точке , х, х,), фазовые координаты которой определяются величиной действующего момента нагрузки М и значением коэффициента С
);
Хс СЛ„Мп/(1-К:,);
х, -C,k,M,/lT(H-C,).
(9)
Дальнейшее двгашние изображагсщей точки системы (1)-(4) в общем случае осуществляется по некоторому предельному, циклу, расположенному вблизи точки Тф(ур, О, 0), соответствхтацей положению компенсации интегратором действия постоянного момента нагрузки. Амплитуда подобных автоколебаний при параметрах электропривода - Т 0,1 м; k,- 10 с ; Ц 2; k 160j С 0,001j Тц 0,05 с - приводит к ошибке слежения, не превьпиающей 0,02 рад., при Ц Мп/Мо 0,1, где MO - пусковой момент БДПТ, а при .,. может быть полностью скомпенсирована.
На фиг.З изображены соответствующие кривые переходных процессов при скачкообразном и линейно изменяющем- ся входных воздействиях,
Достигнутьй результат не сопровождается существенным техническим усложнением системы и может быть достаточно просто реализован на основе с&временных электронных средств,
В результате использования предлагаемой нелинейной коррекции удается значительно снизить (или вообще устранить) перерегулирование, т.е. увеличить динамическую точность сле дящего электропривода
Фор мул а изобретения
Следящий электропривод, содержащий измеритель рассогласования, выход которого соединен с входом предварительного усилителя, подключенного через первый выпрямитель к первому входу сумматора, выход которого через широтно-импульсньй модулятор подключен к управляющему входу бесконтактного двигателя постоянного тока, соединенного через редуктор с первым входом измерителя рассог™
5
о
5
0
5
ласования, а таюке первый сравниванг- щий элемент, первьй вход которого соединен с выходом предварительного усилителя, а выход - с входом интегратора, выход которого подклю ген к входу второго выпрямителя и к первому входу третьего блока умножения, выход которого подключен через первьй усилитель к второму входу первого сравнивакядего элемента, второй вход измерителя рассогласования через дифференциатор соединен с первым входом первого блока умножения, выход которого подключен к второму входу сумматора, третий вход су1-1матора соединен с выходом второго выпрямителя , выход предварительного усилителя через последовательно соединенные фазоопережающий фильтр и реле соединен с вторы.г) входом первого блока умножения.и с входом фазового управления бесконтактного двигателя постоянного тока, кроме того, первьй релейньй элемент, второй блок умножения и однополяриое реле, выход которого соединен с вторым входом третьего блока умножения, а вход - с выходом второго блока умножения, первьй вход которого подключен к выходу первого релейного элемента, отл и, чающийся тем, что, с целью повышения динамической точности, в него введены второй усилитель, второй релейньй элемент и второй сравнивающий элемент, первьй вход которого подключен к выходу предварительного усилителя, выход через второй релейный элемент соединен с вторым входом второго блока умножения, выход интегратора подключен к входам первого релейного элемента и второго усилителя, выход которого подключен к второму входу второго сравнивающего элемента.
ФигЗ
| Следящая система | 1979 |
|
SU900255A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Теория систем с переменной структурой | |||
| /Под ред | |||
| С.В.Емельянова | |||
| М,: Наука, 1970, с.32-43,62 | |||
| Устройство для вычисления значений функции от функции | 1960 |
|
SU135243A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
