Изобретение относится к системам автоматического регулирования и может быть использовано при создани манипуляционньк роботов.
Цель изобретения - повышение динамической точности следящей системы.
На фиг. 1 представлена функциональная схема следящей системы; на фиг. 2 - ее фазовый портрет.
Следящая система содержит первый сумматор 1, первый усилитель 2 первый выпрямитель 3, второй сумма тор А, широтно-импульсный модуля- тор 5, бесконтактный двигатель 6 постоянного тока,реле 7 реверса, фазоопережающий фильтр 8, редуктор 9, первый блок 10 умножения; дифференциатор 11, второй выпрямитель 12, интегратор 13, третий сумматор 1А, второй усилитель 1, второй блок
16 умножения, релейный элемент 17, однополярное реле 18, третий блок 19 умножения.
Следящая система работает следующим образом.
В сумматоре 1 определяется величина рассогласования между входны и выходным углами, которая затем усиливается в усилителе 2. Выходное напряжение усилителя 2 через фазоопережающий фильтр 8 и реле 7 реверса определяет знак управляющего напряжения, поступающего на дви гатель 6, амплитуда которого определяется выходнь; м напряжением сумматора 4.
На входы сумматора 4 поступают сигналы, пропорциональные модулю си нала рассогласования, модулю интеграла от сигнала рассогласования и производной от входного воздействи
Дифференциатор 11 и блок 10 умножения реализуют инвариантный по от ношению к задающему воздействию канал системы, который улучшает качество отработки линейно изменяющихся входных воздействий.
Напряжение на входе интегратора 13 формируется по линейному закон вида
при sign
и
о
Q
при sign Ug signU,,55
TJ + X,
(4)
где Тц - постоянная времени блока 8. где Kgg - коэффициент передачи контура Фазовое, пространство (у, х,х) отрицательной обратной связи, для.предлагаемой следящей системы
охватывающей интегратор 13. Динамика работы следящей системы характеризуется следующей системой дифференциальных уравненений:
х,)
(1)
(2)
Jx| +/yf)
(3)
де X и KM f (х,х)
и„
х, и.
8 У U K коэффициент передачи интегратора 13;
при {sign X /
sign xj; при о (sign sign х);
Т к.
а
Кц - коэффициент передачи ПУ 2; К - общий коэффициент передачи
ШИМ 3, БДПТ 6, Р 9 и ПУ 2;
электромеханическая постоянная времени БДПТ 6;
-коэффициент передачи
от выхода ПУ 2 до выхода выпрямителя 3;
-скорость линейной заводки б; at.
Как следует из фиг. 1 и уравнений (О - (3),предлагаемая следящая система является системой с переменной структурой,причем переключение с одной структуры на-другую определяется соотношением между значениями sign X и sign XK (всего возможны четыре различных структуры).
В качестве фазовых координат системы выберем g, X их. Тогда переключение с одной структуры на другую будет происходить на плоскостях этого фазового пространства.Скользящие движения в системе возможны только при t О поэтому сформируем поверхность переключения S в виде
TJ + X,
(4)
изображено на фиг. 2. При входном воздействии в виде единичного скачка 1 (t) движение в системе начинается с точки Мд(0, X , 0) и в дальнейшем происходит по фазовой траектории до попадания на плоскость скольжения S (точка К,), после чего движение протекает в скользящем
режиме (участок М,К, фазовой траекто-ю рез редуктор - с вторым входом перч
рии). Положение изображений точки фазового пространства, соответствующее завершению в системе переходного процесса, существенно зависит от наличия на валу двигателя 6 момента нагрузки.Если момент нагрузки,приведенный к валу двигателя 6, равен нулю (ки 0), то после завершения переходного процесса изображающая точка будет находиться в начале координат фазового пространства. Когда К„ О, после завершения переходного процесса изображающая точка будет находиться на оси О, что означает, что напряжение, занесенное интегратором 13, компенсирует влияние момента нагрузки и ошибка в системе при постоянном моменте нагрузки на валу двигателя 6 будет равна нулю. Указанным двум случаям (М, 0 и MH 7 0) на фиг. 2 соответствуют участки MjO и , фазовых траекторий.
Таким образом, использование интегратора, охваченного нелинейной о.братной связью, позволяет существенно снизить перерегулирование и тем самым повысить динамическую точность системы.
Формула изобретения Следящая система, содержащая первый сумматор,выход которого соединен с входом первого усилителя, вывого сумматора, выход первого усилителя через первый выпрямитель соединен с первым входом второго сумматора, второй вход которого соединен 15 с выходом первого блЬка умножения, первый вход которого соединен с выходом реле реверса, отличающаяся тем,что,с целью повышения динамической точности,дополнительно 20 введены дифференциатор,третий сумматор, второй усилитель, второй выпрямитель, второй и третий блоки умножения, релейный элемент и однополяр- ное реле, вход дифференциатора сое- 25 динен с первым входом первого
сумматора, а выход - с вторым входом первого блока умножения, выход первого усилителя соединен с первым входом третьего сумматора и входом 30 релейного элемента, выход которого соединен с первым входом второго бло ка умножения, второй вход которого соединен с выходом реле реверса, а выход - с входом однополярного реле 2g выход которого соединен с первым
входом третьего блока умножения, вто рой вход которого соединен с выходом интегратора и входом второго выпрями теля, выход которого соединен с трет до им входом второго сумматора,выход т ретьего блока умножения через второй усилитель соещ1нен с вторым вхо дом третьего сумматора,выход которого соединен с входом интегратора
тьм
1352451
ход которого соединен с последовательно соединенными фазоопережающим фильтром и реле реверса, выход кото. рого соединен с первым входом бесконтактного двигателя постоянного тока, второй вход которого через широтно- импульеный модулятор соединен.с выходом второго сумматора, а выход чевого сумматора, выход первого усилителя через первый выпрямитель соединен с первым входом второго сумматора, второй вход которого соединен с выходом первого блЬка умножения, первый вход которого соединен с выходом реле реверса, отличающаяся тем,что,с целью повышения динамической точности,дополнительно введены дифференциатор,третий сумматор, второй усилитель, второй выпрямитель, второй и третий блоки умножения, релейный элемент и однополяр- ное реле, вход дифференциатора сое- динен с первым входом первого
сумматора, а выход - с вторым входом первого блока умножения, выход первого усилителя соединен с первым входом третьего сумматора и входом релейного элемента, выход которого соединен с первым входом второго блока умножения, второй вход которого соединен с выходом реле реверса, а выход - с входом однополярного реле, выход которого соединен с первым
входом третьего блока умножения, второй вход которого соединен с выходом интегратора и входом второго выпрямителя, выход которого соединен с треть- им входом второго сумматора,выход т ретьего блока умножения через второй усилитель соещ1нен с вторым входом третьего сумматора,выход которого соединен с входом интегратора.
(pue.Z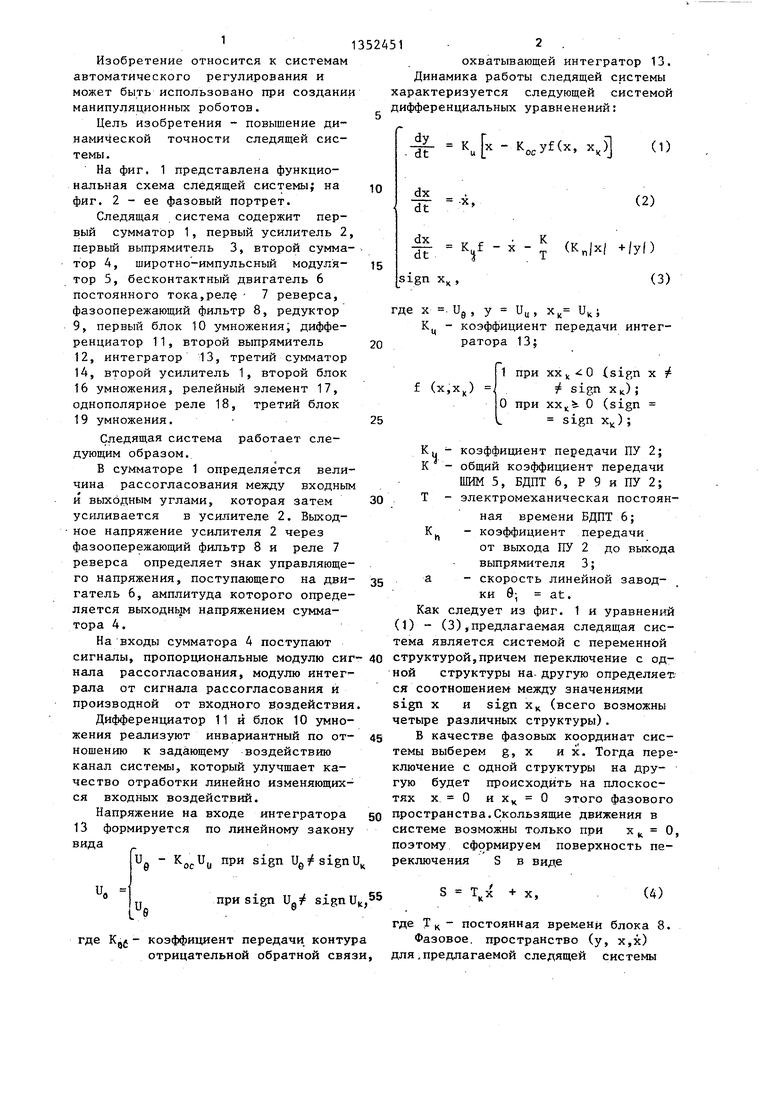

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1987 |
|
SU1425595A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Следящая система | 1979 |
|
SU900255A1 |
| Следящий электропривод | 1987 |
|
SU1446600A1 |
| Следящая система | 1979 |
|
SU847275A1 |
| Релейная следящая система с нелинейной коррекцией | 1984 |
|
SU1223205A1 |
| Следящая система | 1978 |
|
SU763851A1 |
| СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1992 |
|
RU2034695C1 |
| Следящая система | 1975 |
|
SU550617A1 |
| Псевдолинейное корректирующее устройство | 1979 |
|
SU851332A1 |
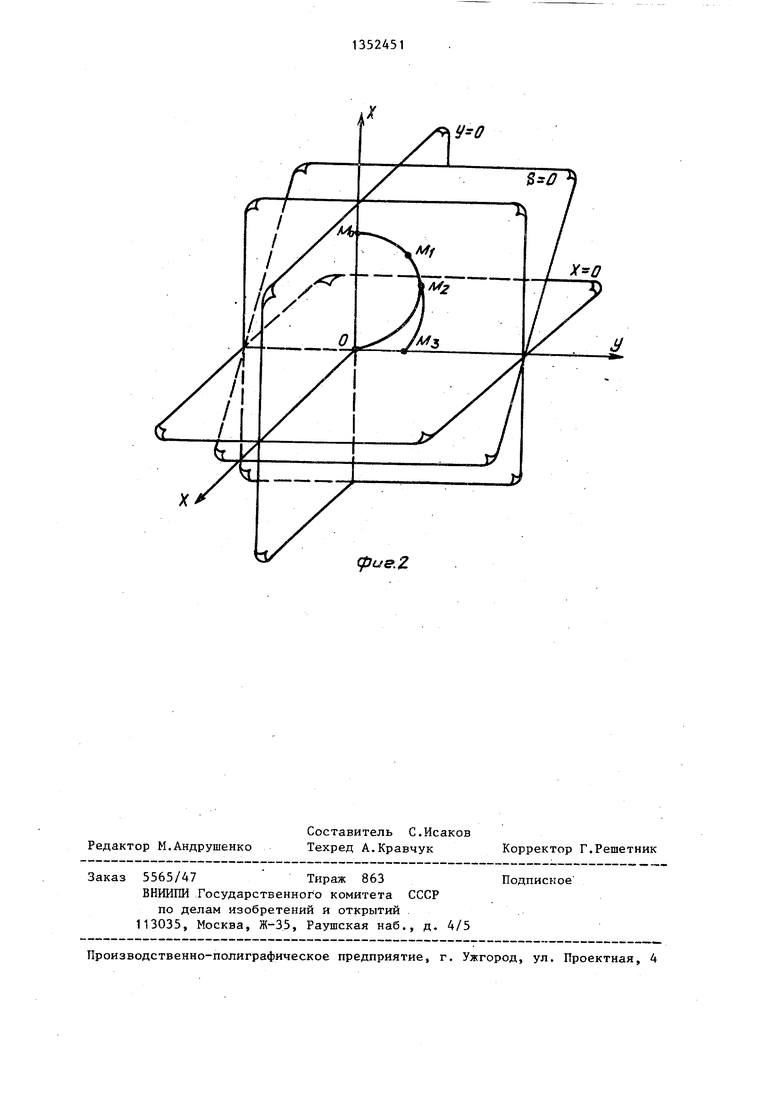
Изобретение относится к следящим системам с бесконтактными двигателями постоянного тока. С целью Повьппения динамической точности интегратор охватывается через усилитель коммутируемой отрицательной обратной связью, которая включается когда знаки сигнала рассогласования и сигнала на выходе фазоопережаю- щего фильтра противоположны. Выпрямленный сигнал интегратора подключается к контуру системы без дополнительных коммутаций.Следящая система содержит сумматоры .1,4 и 14, усилители 2 и 15, выпрямители 3 и 12, широтно-импульсный модулятор 5, бесконтактный двигатель 6 постоянного тока,реле 7 реверса,фазоопережа- ющий фильтр 8, резистор 9, блоки 10,16 и 19 умножения, дифференциатор 11, интегратор 13, релейный, элемент 17, однополярное реле 18. 2 ил. (Л ф1/9. f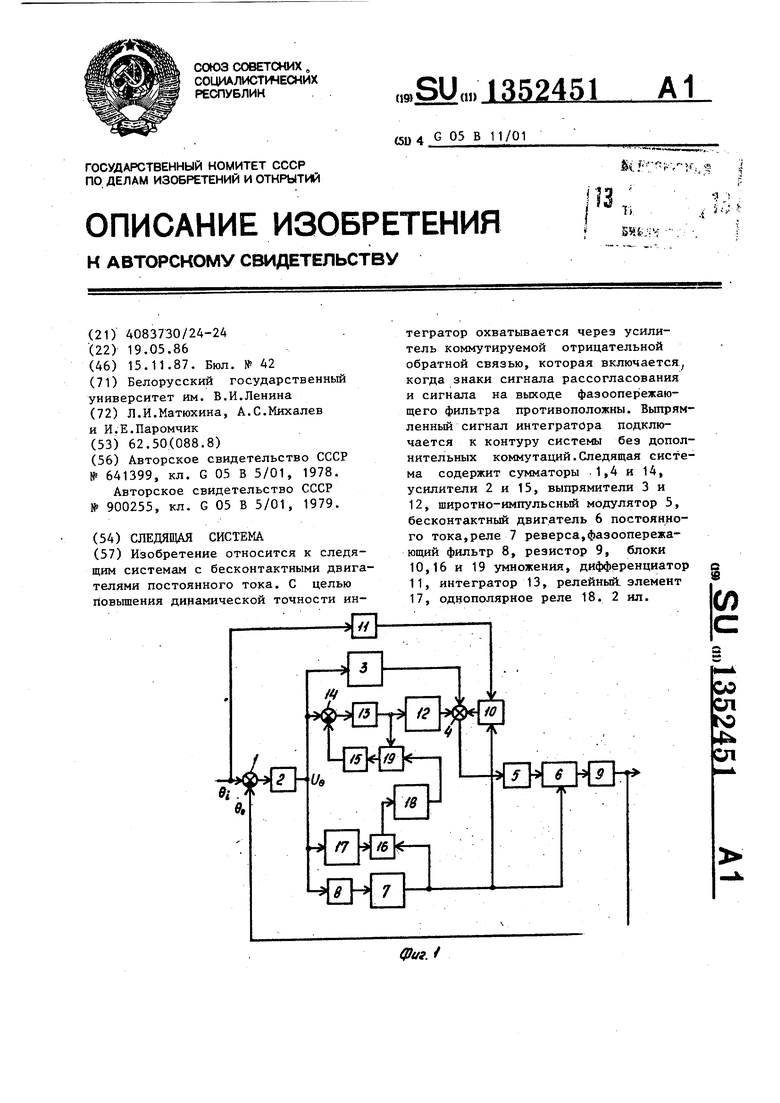
Редактор М.Андрушенко
Составитель С.Исаков Техред А.Кравчук
Заказ 5565/47 Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Г.Решетник
| Следящая система | 1976 |
|
SU641399A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящая система | 1979 |
|
SU900255A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
