Изобретение относится к следкш.им системам с бесконтактны ш двигателями постоянного тока и нелинейныг.к корректирующими устройствами и може быть использовано для их упрощения и повышения устойчивости.
Известны бесконтактные следям-,т;тсистемы постоянного тока с не-Г7Т:;з::ными корректирующими звеньями; .-: с;.- став которых входят интегратор i; ;voгические блоки, содержащие тахогенераторы, выпрямители, блоки умножения, сумматоры и сравнившощие элементы 1 .
Наиболее близкой к предлагаемой системе является следящая система;. содержащая блок умножения, последовательно соединенные выпрямительсумматор, широтно-импульсный г:сшулятор, бесконтактный двигатель постоянного тока, редуктор, измерятапь рассогласования, усилитель, фазооггережающий фильтр и реле реверса, выход которого соединен со вторым входом бесконтактного двигателя постоянного тока, выход усилителя соединен со входами выпрямителя и интегратора, а выход блока соединен со вторым входом сумматора 2,
Иег1остат;;г ятей системтл состоят 3 сложнссхк, оО слозленной пспользовакиеь з его ;;огическо1.: блоке конструктивно сложного электромеханичес кого элз;.;ен1Б - тахогекератора, а п-. и ск.ионвостп к автоколебаниям 1; pejKHiJC ; ь:::1укдеппы;: движений.
п oOpe гeния на,,, ;.3л;косги ;; устойчиво :, и ..-2л„
Sia цель ;iooi.i-rccTc;i ---м, что в следящей cиcтe :e перв1хй в.од блока умножения соединен с выходом интегратора, а второй - с выходом реле реверса.
15
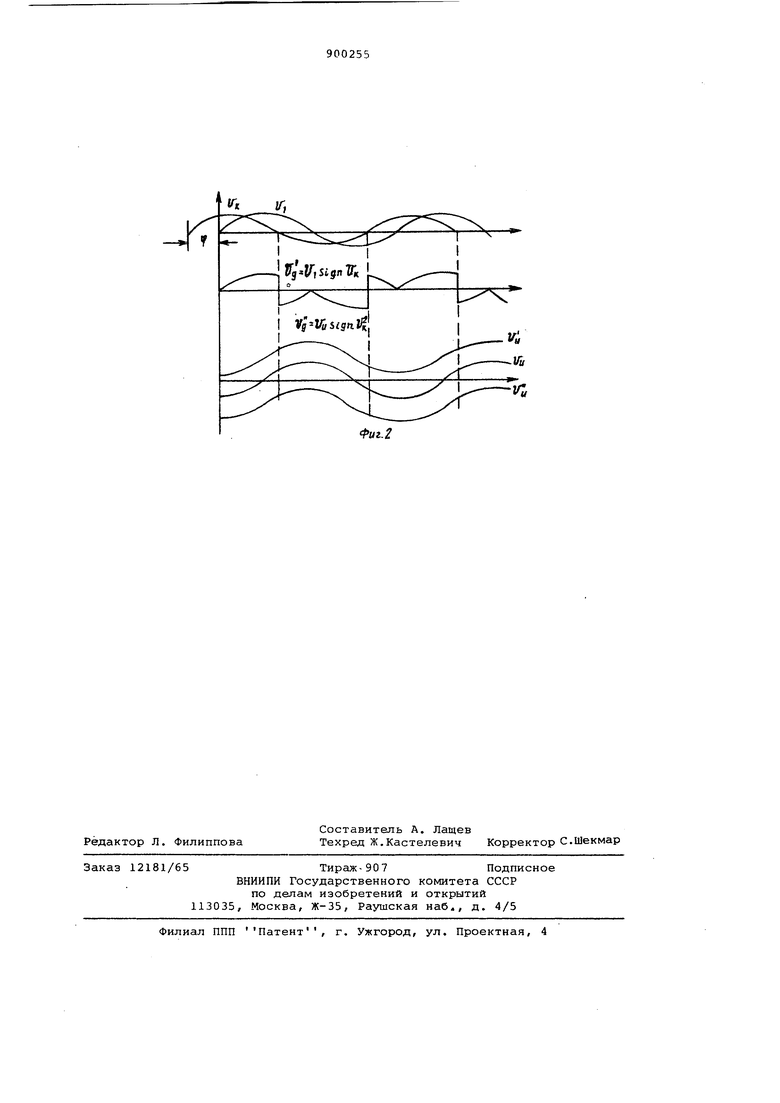
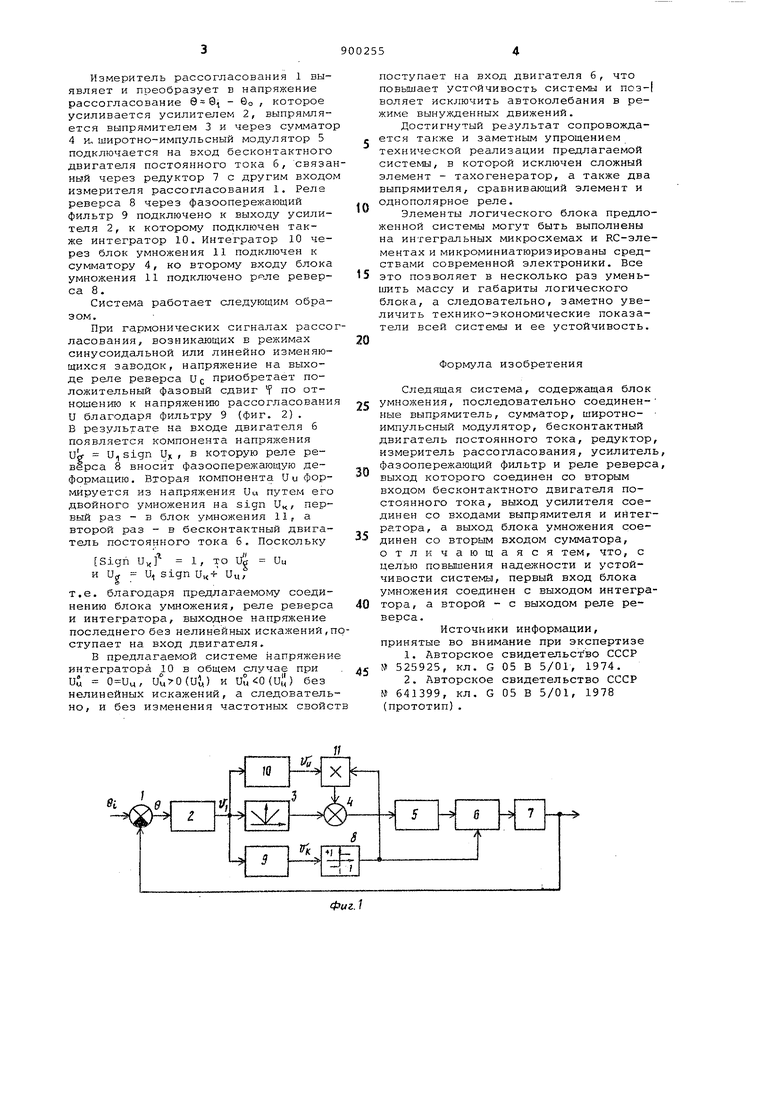
На фпг, I представлена структурная схема следящей системы; на фиг, 2 - згпо: ы зе основных сигналов yfj пои гармоническом сигнале рассоглассвагпя«
прин я ты еле душащие
На фиг, 1 ; обозначения;
W,(P} передаточная функция фазоопережающего фильтра;
25 в ОА QO рассогласование, входной и выходной углы системы; и ,Ut - напряжения на выходах
усилителя и интегратора; и.;,- - напряжение на входе
30 двигателя. Измеритель рассогласования 1 выявляет и преобразует в напряжение рассогласование ®о которое усиливается усилитеУ1ем 2, выпрямляется выпрямителем 3 и через суммато 4 и, широтно-импульсный модулятор 5 подключается на вход бесконтактного двигателя постоя1 ного тока б, связа ный через редуктор 7 с другим входо измерителя рассогласования 1. Реле реверса 8 через фазоопережающий фильтр 9 подключено к выходу усилителя 2, к которому подключен также интегратор 10. Интегратор 10 через блок умножения 11 подключен к сумматору 4, ко второму входу блока умножения 11 подключено рчле реверса 8. Система работает следующим образом. При гармонических сигналах рассо ласования, возникгиощих в режимах синусоидальной или линейно изменяющихся заводок, напряжение на выходе репе реверса и с приобретает положительный фазовый сдвиг Y по отношению к напряжению рассогласовани и благодаря фильтру 9 (фиг. 2). В результате на входе двигателя б появляется компонента напряжения Ug- и, sign у , в которую реле реверса 8 вносит фазоопережающую деформацию. Вторая компонента Uи формируется из напряжения Uu путем его двойного умножения на sign UK/ первый раз - в блок умножения 11, а второй раз - в бесконтактный двигатель постоянного тока 6. Поскольку Sign U.f 1, то Uo Ui, и U -- Ц sign U,+ Ui,, т.е. благодаря предлагаемому соединению блока умножения, реле реверса и интегратора, выходное напряжение последнего без нелинейных искажений , п ступает на вход двигателя. В предлагаемой системе напряжени интегратора Q в общем случае при Uu , (ul,) и (u|J) без нелинейных искажений, а следователь но, и без изменения частотных свойс поступает на вход двигателя 6, что повышает устойчивость системы и позволяет исключить автоколебания в режиме вынужденных движений. Достигнутый результат сопровождается также и заметным упрощением технической реализации предлагаемой системы, в которой исключен сложный элемент - тахогенератор, а также два выпрямителя, сравнивающий элемент и однополярное реле. Элементы логического блока предложенной системы могут быть выполнены на интегральных микросхемах и КС-элементах и микроминиатюризированы средствами современной электроники. Все это позволяет в несколько раз уменьшить массу и габариты логического блока, а следовательно, заметно увеличить технико-экономические показатели всей системы и ее устойчивость. Формула изобретения Следящая система, содержащая блок умножения, последовательно соединенные выпрямитель, сумматор, широтно- импульсный модулятор, бесконтактный двигатель постоянного тока, редуктор, измеритель рассогласования, усилитель, фазоопережающий фильтр и реле реверса, выход которого соединен со вторым входом бесконтактного двигателя постоянного тока, выход усилителя соединен со входами выпрямителя и интегратора, а выход блока умножения соединен со вторым входом сумматора, отличающаяся тем, что, с целью повьиения надежности и устойчивости системы, первый вход блока умножения соединен с выходом интегратора, а второй - с выходом реле реверса. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР S 525925, кл. G 05 В 5/01, 1974. 2.Авторское свидетельство СССР 641399, кл. G 05 В 5/01, 1978 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1986 |
|
SU1352451A1 |
| Следящая система | 1987 |
|
SU1425595A1 |
| Следящая система | 1979 |
|
SU862114A1 |
| Следящая система | 1978 |
|
SU763851A1 |
| Следящая система | 1978 |
|
SU697969A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Следящий электропривод | 1987 |
|
SU1446600A1 |
| Следящая система | 1986 |
|
SU1472871A1 |
| Следящая система | 1979 |
|
SU788076A1 |
| Следящая система | 1975 |
|
SU545969A1 |