Изобретение относится к системам автоматического регулирования с бесконтактными двигaтeля ш посто5шного тока и может быть использовано в следящих системах промышленных роботов.
Цель изобретения - повышение динамической точности следящих систем с бесконтактными двигателями постоянного тока.
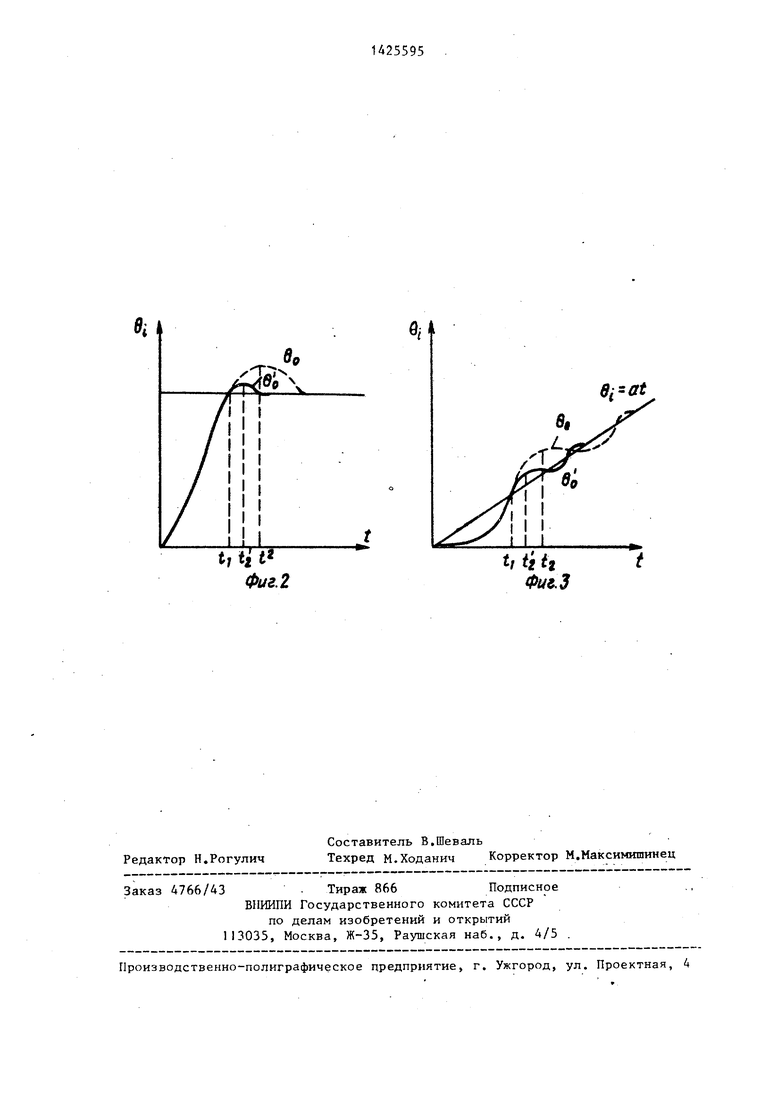
На фиг.1 представлена функциональ ;ная схема следящей сиетемыJ на фиг„2 и 3 - переходные процессы характери- ;зующие работу предлагаемой следящей jсистемы.
Приняты следующие условные обо-эна- чения и сокращения: 8; s 0o - - . входной и выходной углы .системы и рассогласование между ними| Ug, U, ;U; - выходные сигналы первого усили™ :теля5 фазоопережающего фильтра и ин гегратора- U - напряжение на входе :интегратораj U - напряжение на вхо |де двигателя.
Следящая система состоит из пер- ;вого сумматора 1, первого усилителя 2j фазоопережаивдего фильтра (ФФ) 3,, реле 4 реверса, бесконтактного дви- |гателя 5 постоянного тока (БДПТ), ;широтно-импульсного модулятора (ИИМ) 16, второго сз мматора 7, редуктора 8,, :первого и второго выпрямителей 9 и ;10j интегратора Т1 третьего суммато ура 12, второго усилителя 13 первого ;блока 14 умножения однополярнсго реле 15, второго блока 16 умножения |И релейного элемента 17 ; Система работает следующим образом,
В сумматоре 1 определяется величина рассогласования между входным к выходным углами 9 б о s которая затем усиливается усилителем 2, выходное напряжение которого через ФФ 3 и реле 4 реверса определяет знак поступающего на первьй вжщ БДПТ 5 управляклдего напряжения амплитуда которого определяется величиной ходного напряжения сумматора 7, че™ рез ШИМ 6 соединенного с вторым вхо дом БДПТ 5 о На первый вход сумматора 7 через первый выпрямитель 9 по ступает сигнал,, пропорциональный модулю сигнала рассогласования, на второй вход сумматора 7 через второй
выпрямитель 10 сигнал, пропорциональный модулю интеграла от сигнала рассогласояания.
Напряжение на входе интегратора 11 формируется по нелинейному закону с помощью Фф 3, реле 4 реверса, сумматора 12, усилителя 13, блоков 14 и 16 умножения, однополярного реле 15 и релейного элемента 17 в соответствии с фиг,1 и mieeT следующий вид:
to у jUg-KocU;. при sign Г, signU о 1 Ug при sign U signU,
(О
где Кд - коэффициент усиления усилителя 13, Тем самым на интервалах времени когда знаки сигналов U; и и противоположны, интегратор 11 через второй усилитель 13 и третий сумматор 12 охватывается отрицательной обратной связью.
Как следует из фиг,1 и формул (1)j предлагаемая следящая система является системой с переменной структурой, где в качестве фазовых координат выбраны X Ug, у и, и X 0. Переключения с одной структуры на другую (всего возможны четьфе структуры) происходят на плоскостях у О и ТцХ + X О, где Т - постоянная времени ФФ 3. Режим скользящих движений в системе возможен только на плоскости переключения
S T,,i -f X,
(2)
35
которая должна удовлетворять условию суй(ествования скользящего режима в системах с переменной структурой
SS 0.
(3)
С учетом уравнений динамики предлагаемой следящей системы:
- К;х - (y,S);
II - /()
И Л а-Лх-Si|LK.L(Kj HyOsignS,
где К; - коэффициент передачи интегратора 11,
f( S) Ри sign у signS; О при sign у signS,
К - коэффициент усиления перво, го усилителя 2 Т - электромеханическая постоянная времени БДПТ 5,
к - коэффициент передачи
S
К. а
БДПТ 5}
- коэффициент передачи редук тора 8j
коэффициент передачи от выхода усилителя 2 до выхода йьтрямителя 9; скорость линейной заводки 9i at.
Из формулы (2) путем дифференцироания получают
S bliia + (1 -2|)х - I
(5)
KjxJ + |y/)signS,
Так как при , ормулы (5) следует
ТиХ -X, то из
S/C
20 ствляется только за счет сигнала
S.O B/x/signS-C/y|signS,(6) рассогласования х вплоть до смены
знака напряжения U,, При этом нап14255954
следящей системе может возникнуть перерегулирование из-за инерционных свойств интегратора. В известной с системе при , происходит отключение отрицательной обратной связи через усилитель 13 и сумматор 12, охватьтающей интегратор 11, вплоть до момента времени t t, переклго- 10 чения реле 4- реверса за счет смены знака сигнала на выходе ФФ 3. тому
случаю соответствует кривая б на фиг,2. Аналогичным об зазом извест- ,ная система работает и при лилейной
15 .заводке. Как видно из фиг.З в этом случае отрицательная обратная связь также отключается при . Тем самым при возникновении перерегулирований разряд интегратора 11 осутце20 ствляется только за счет сигнала
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1986 |
|
SU1352451A1 |
| Следящий электропривод | 1987 |
|
SU1446600A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Следящая система | 1979 |
|
SU900255A1 |
| Следящая система | 1975 |
|
SU545969A1 |
| Бесконтактная следящая система постоянного тока | 1975 |
|
SU525925A1 |
| Следящая система | 1978 |
|
SU746405A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ АСТАТИЧЕСКОГО ОБЪЕКТА | 1996 |
|
RU2103714C1 |
| Цифровая следящая система | 1987 |
|
SU1730610A1 |
| Следящая система | 1978 |
|
SU763851A1 |

Изобретение относится к системам автоматического регулирования с бес- , контактными двигателями постоянного тока и может быть использовано в следующих системах промышленных роботов. Цель изобретения - повышение динамической точности следящих систем с бесконтактными двигателями постоян- ного тока. Следящая система является системой с переменной структурой с четьфьмя возможными структурами. Согласование входной и выходной осей системы происходит в следящем режиме. После первого согласования отрицательная обратная связь, обхваты шо- щая интегратор коррекции, не отключается. Отключение происходит лишь при несовпадении знаков сигналов с выхода интегратора и выхода фазоопережяющего звена коррекции. Выпрямленный сигнал интегратора вводится в контур следящей системы без дополнительных коммутаций, В результате уменьшается величина перерегулирования, 3 шт. (Л
где А
В
Т - Тк. ТТк KjiKpK KcTj
т
/ -if;-
Из формулы (6) , и для скользящего режима ся условие:
. ()
С.О,
что дает достаточные условия существования скользящего режима , С О при . Последаие соотношения действительно имеют мес- то, поскольку В, С - положительны по своей физической сущности при , В этом случае условие существования скользящего режима (7) выпол
ТГ fTI
няется для всех .
Поскольку в положении равновесия системы , то в соответствии с третьим из уравнений (4) имеют - -KvTk
Уд , поэтому при
почти вся поверхность S является поверхностью скольжения.
При подаче скачкообразного входно- .го сигнала в системе возникает скользящий режим, при котором происходит первое согласование входной и выходной осей системы. В момент времени t( первого согласования осей в
25
30
35
с
-
40
45
50
55
ряжение U;, запасенное интегратором 11, не используется для увеличения напряжения U на входе интегратора 11 для уменьшения перерегулирования и ускорения разряда интегратора 11. В предлагаемой системе за счет подключения выхода интегратора 11 к входу релейного элемента 17 удается существенно улучшить динамическую точность следящей системы. Действительно, после первого согласования входной и выходной осей и возникновения перерегулирования (при ) отрицательная обратная связь через усилитель 13 и сумматор 12, охватьшающая интегратор 11, не отключается до момента времени t t jtt, когда происходит переключение реле 4 реверса, В этом случае на выходе интегратора 11 присутствует сигнал X - КОР у, имеющий противоположный знак накопленному интегратору 11 напряжению П;, причем |х - КосУ/ |х|, так как Bignx eigny,, Это уменьшает величину перерегулиро вания, физически необходимую для разряда интегратора 11 увеличивает быстродействие и динамическую точность следящей системы.
Формула изобретения
Следящая система, содержащая первый сумматор, выход которого соединен с входом первого усилителя, выход которого через, первый выпрямитель соединен с первым входом второго сумматора, а также с последовательно соединенными фазоопережающим фильтром и реле реверса, выход которого соЕДинен с первым входом бесконтакт- ного двигателя постоянного тока, второй вход которого через широтно- импульсный модулятор соединен с вы- |ходом второго сумматора, а выход сое- |динен через редуктор с вторым входом первого сумматора, второй вход второ- 1го сумматора соединен с выходом вто- iporo выпрямителяJ входом соединенного |с выходом интегратора, вход которого
|связан с выходом третьего сумматора, 15 релейного элемента.
к входам которого подключены соответственно выходы первого и второго усилителей, вход второго усилителя сое- динен с выходом первого блока умножения, к входам которого подключены выходы интегратора и однополярного реле, вход которого соединен с выходом второго блока умножения, к входам которого пoдклюtгeны выходы реле реверса и релейного элемента, отличающаяся тем, что, с целью повышения динамической точности, выход интегратора подключен к входу
м
t, tg it Фиг.3
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Теория систем с переменной структурой, / Под ред | |||
| С.В.Емельянова, - М,: Наука, 1979, Авторское свидетельство СССР по заявке № 4083730/24-24, кл, G 05 В 11/01, 1986, | |||
