Предложенное моделирующее устройство для расчета шатунно-кулачковых механизмов содержит модель шарнирного четырехзвепиика с регулируемыми параметрами, подвижну;о бумажную ленту и два стержня, расположенных над лентой и перемещающихся в направлении, перпендикулярном ее . Модель шарнирного четырехзвенника состоит из кривошипа, шатуна, имеющего паз по форме профиля кулачка, коромысла и шатуна.
Ведущий валик подвижной ленты кинематически связан с кривошипом.
Стержни несут пишущие штифты для раздельного вычерчивания графиков пути и угла передачи ведомого звена. Один из стерл ней имеет на конце ролик, входящий в паз шатуна и несущий на своей оси свободно надетое зубчатое колесо с пальцем, скользящим в пазу шатуна, а другой стержень представляет собой зубчатую рейку, находящуюся в зацеплении с этим колесом.
С помощью предлагаемого устройства можно по заданному четырехзвеннику и профилю кулачка определить закон движения и угол передачи ведомого звена.
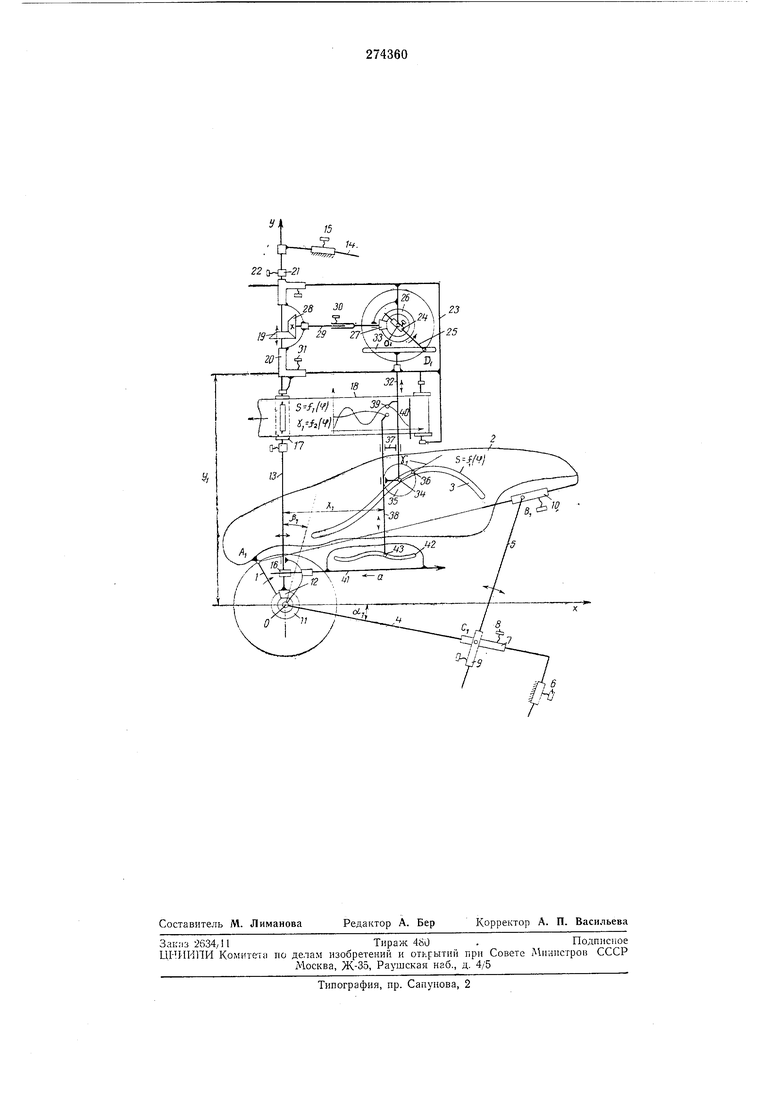
На чертеже показана кинематическая схема устройства.
щего на оси О, шатуна 2, связанного с кривошипом в точке AI, имеющего паз 3 по профилю кулачка, поводка 4 и коромысла 5- Положение поводка 4 в системе координат XY устаиавливается по углу .«i и фиксируется винтом 6. На поводке установлен ползун 7, закрепляемый винтом 8.
На коромысле 5 помещен ползун 9, связанный шарнирно в точке Ci с ползуном 7. В точке BI коромысла закреплен ползун 10.
На ось О посажена зубчатая коническая шестерня 11, которая посредством эторой конической шестерни 12 соединяется с валом 13, иолол ение которого в системе координат XY
устанавливается ио углу Pi при помощи направляющей 14 и фиксируется винтом 15.
На валу 13 укреплено зубчатое колесо 16, ведущий транспортирующий валик 17 подвижной бумажной ленты l8 и коническая зубчатая
шестерня 19, иолзун 20 и втулка 21. После установки иараметра Fj втулка 21 жестко фиксируется винтом 22.
В направляющих иолзуна 20 иомещена рама 23, в которой смонтирован синусный механизм и самопишушее устройство.
В точке Oi рамы 23 свободно вращается втулка 24, через которую проходит кривошип 25. Втулка 24 закрепляется винтом, и с ней жестко скреплена зубчатая коническая шесшестерен 27 и 2S и промежуточного валика 29 соединена с конической шестерней 19.
Валик 29 состоит из двух частей, скрепляемых винтом 30.
Положение рамы 23 относительно ползуна 20 устанавливается по параметру Х и фиксируется винтом 31.
В раме 23 установлено ведомое звено - стержень 32 с горизонтальным пазом 33, в который входит палец -Di кривошипа 25.
На конце стержня 32 закреплен ролик 34, ВХОДЯШ.ИЙ в паз 3 шатуна 2. Кроме того, этот стержень несет свободно надетое зубчатое колесо 35 с пальцем 36, скользяш;им в пазу 3 шатуна 2.. .В направляющих связи 57 свободно установлен второй стержень 38, параллельный стержню 32. Стержень 38 представляет собой зубчатую рейку, входящую в зацепление с зубчатым колесом 35.
Стержни 32 и 38 расположены над бумал ной лентой 18 и несут пишущие штифты 39 и 40 для раздельного вычерчивания на ленте графиков пути и угла передачи ведомого звена при своем перемещении в направлении, перпендикулярном к движению ленты.
Для подбора профиля шатуна-кулачка и размеров шариириого четырехзвенного механизма по заданному закону движения ведомого звена и угла передачи между ведомым звеном и профилем шатуна к - предлагаемому устройству добавляются вспомогательная рейка 41, входящая в зацепление с зубчатым колесом 16 и перемещающаяся по стрелке а. Рейка 41 связана с шатуном, имеющим профильный паз 42, в который входит ролик 43, располол ённый на ;конце стержня Ж
Для определения закона двилсения ведомого звена и угла передачи задаются параметрами иь |3i, diDi, Ji, У I. Фиксируют длины шатуна 2 и коромысла .
При вращении кривошипа 1 шатун 2 совершает плоско-параллельное движение и через ролик 5 сообщает движение стержню 32 с пишущим щтифтом 59. При перемещении пальца 36 в ц азу 5 зубчатое колесо 55 приводится во
вращение, и стержень 5Sc пишущим штифтом 40 также приводится в действие.
Пишущий штифт 40 фиксирует изменение угла передачи YI между подвижным профилем
шатуна 2.
Для определения профиля шат на-кулачка и угла передачи фиксируют по заданным параметрам все размеры звеньев. По максимальному перемешению определяют длину
кривошипа 25. Палец DI кривошипа устанавливают в паз 55 ведомого звена, т. е. соединяют валик 29 с синусным механизмом. При этом палец 36 снимают с зубчатого колеса 55. При вращении кривошипа 1 на подвижной
плоскости шатуна 2 вычерчивается теоретический профиль шатуна-кулачка, т. е. кривая 5 Г1(ф).
Далее при закреплении пальца 36 с зубчатым колесом 55 и при врашении кривошипа /
пишушие штифты 39 и 40 вычертят по ленте 18 функциональные кривые 5 /|(ф) и.у1
/2(ф).
Предмет изобретения
Моделирующее устройство для расчета шатунно-кулачковых механизмов, отличающееся тем, что, с целью механизации построения функциональных кривых перемешеиия и углов
передачи ведомого звена, оно содержит модель шарнирного четырехзвенника с регулируемыми параметрами, состоящего из кривошипа, шатуна, имеюшего паз по форме профиля кулачка, коромысла и шатуна, подвижную бумажную лепту, ведущий валик которой кинематически связан с кривошипом, и два расположенных над лентой и перемешаюшихся в направлении, перпендикуляриом ее движению, стерлсня с пишущими штифтами для раздельного вычерчивания графика пути и угла передачи, при этом один из стержней имеет на конце ролик, входящий в паз шатуна и несущий на своей оси свободно надетое зубчатое колесо с пальцем, скользящим в пазу шатуна, а
другой стержень представляет собой зубчатую рейку, находяшуюся в зацеплении с этим колесом.
15
гз