Предлагаемое моделирующее устройство для синтеза и анализа мальтийских механизмов механизирует нроцесс вычерчивания кинематических кривых. Оно содерл ит модуль кулисного механизма с изменяемыми параметрами, состоящего из кривошипа, кулисы с пазом и поводка с продольным пазом, перпендикулярного кулисе и связанного с ней зубчато-реечной передачей. В месте пересечения пазов поводка и кулисы установлен ролик. С кривошином кинематически связан ведущий транспортирующий валик подвижной бумажной ленты. Над лентой расположены два стержня, перемещающиеся в нанравлении, перпендикулярном ее движению, которые несут пишущие штифты для раздельного вычерчивания на ленте графиков пути и скорости. При этом стержень с нишушим штифтом для вычерчивания графика скорости связан трособлочной передачей с роликом, а стержень с пишущим штифтом для вычерчивания графика пути связап с кулисой зубчато-реечной передачей.
На оси кулисы смонтирован крестообразный пантограф для установления функциональной зависимости между радиусом и углом поворота мальтийского мехапизма.
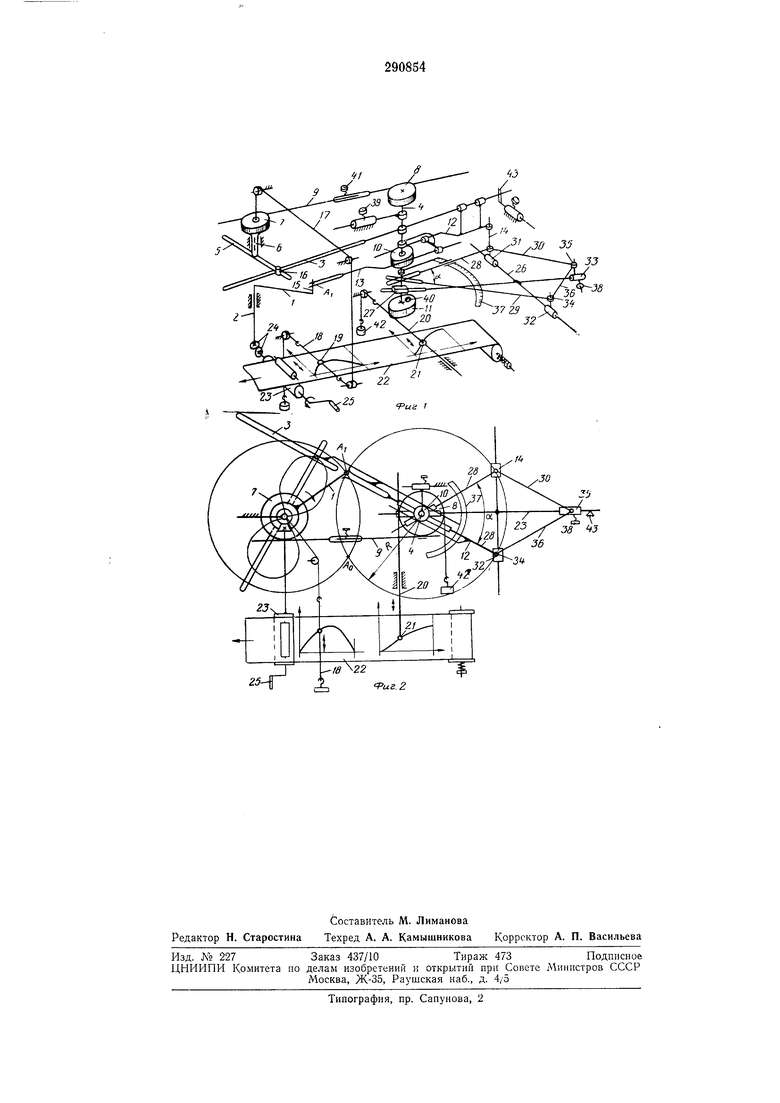
Устройство содержит модель кулисного механизма с изменяемыми параметрами, состоящего из кривошипа /, жестко связанного со свободно вращающимся валом 2, кулисы 3 с
продольным пазом, л естко сидящей на валу 4, и поводка 5 с продольным пазом, перпендикулярного кулисе. Поводок жестко связан со свободно вращающейся в корпусе прибора втулкой 6, центр вращения которой совпадает
с осью вращения кривошипа. На валах 2 и 4 помещены зубчатые шестерни 7 и 8, кинематически связанные при помощи рейки 9, состоящей из двух частей, соединенных винтом. Кроме того, на валу 4 помещены шестернп W
н //, с которыми сцеплены две параллельные рейки 72 и }3. Рейка 12 шарнирно соединена с осью 14 и посредством направляющих втулок насажена на конец кулисы 3. Конец рейки 13 представляет собой кулпсу, с которой
зацеплен в точке А палец 15 кривошипа /. Направление паза кулисы рейки 13 совпадает с направлением кулисы 3. Кривошип /, рейки 12 и 13 расположены в одной плоскости.
В пересечении пазов поводка 5 и кулисы 3 установлен ролик 16, который с помощью трособлочной передачи 17 кинематически связан со стержнем 18, несупи(м шипущпй штифт 19 для вычерчивания графика скорости ведоС шестерней 11 входит в зацепление стержень 20 с пишущим штифтом 21 для вычерчивания графика скорости ведомого звена. Стержни 18 и 20 расположены параллельно один другому над подвижной бумажной лентой 22, ведуший транспортируюш,ий валик 23 которой кинематически связан с кривошипом посредством конической передачи 24. Валик 23 приводится во враш,ение рукояткой 25.
Устройство снабжено крестообразным пантографом, звено 26 которого закреплено в направляюш,ей 27, свободно установленной на валу 4. На остальных звеньях 28, 29 и 30 свободно помещены ползуны 31, 32 и 33. Ползун 33 жестко закреплен на отводке звена 26, и, кроме того, с ползунами 31, 32 и 33 жестко связаны оси 14, 34 и 35. С осью 35 шарнирно соединены звенья 30 и 56, свободные концы которых шарнирно связаны с осями 14 и 34. Длина этих звеньев должна быть одинаковой.
На осях 14 и 34 шарнирно насал ены звенья
28и 29, свободные концы которых через продольные пазы кинематически связаны с валом 4. Направление одного из звеньев 28 или
29совпадает с направлением кулисы 3. Для установки и определения угла а, между
звеньями 28 и 29 имеется шкала 37, шарнирно связанная с валом 4, а со звеном 28 - при помощи поступательной пары. Перемещением ползуна 33 устанавливается размер между осями 34 и 14, фиксируемый винтом 38.
Устройство работает следующим образом. В зависимости от холостого и рабочего угла поворота ведомого звена определяют расстояние AI-Ло. Ползун 33 перемещают так, чтобы расстояние между осями 14 и 34 было бы равно , и винтом 55 закрепляют это положение. Далее устанавливают расстояние между валами 2 и 4 VL фиксируют положение винтом 39. По заданному количеству остановок мальтийского креста определяют угол а.
Крестообразный пантограф перемещают в направляющей 27 так, чтобы угол между звеньями 28 и 29 был бы равен углу а, отсчитываемому по шкале 57. Угол фиксируют винтом 40. Одновременно определяют радиус R мальтийского креста, равный расстоянию между валом 4 и осью 14 или валом 4 и точлОЙ Л.
Кулису 5 устанавливают в крайнее исходное ноложение и перпендикулярно к ней устанавливают поводок 5. Рейку 9 фиксируют винтом 41.
При вращении рукоятки 25 приводят все механизмы в движение. В начальный момент работы палец 15 кривощипа зацепляется с пазом рейки /5 и поворачивает ее на угол а. В точке Ло палец 15 выходит из паза рейки
13, и вся система, связанная с кулисой 5, посредством груза 42 и реечной передачи, составляемой стержнем 20 и шестерней 11, перемещается в противоположном направлении до ограничителя 43.
Колебательное движение кулисы вокруг вала 4 при помощи зубчатой передачи, включающей шестерни 7, S и рейку 9, передается поводку 5. Ролик 16 передает движение через трособлочную передачу 17 стержню 18. Пишущий штифт 19 вычерчивает на движушейся ленте 22 график скорости ведомого звена.
График пути ведомого звена вычерчивается пишущим штифтом 21.
Предмет изобретения
Моделирующее устройство для синтеза и анализа мальтийских механизмов, отличающееся тем, что, с целью механизации процесса вычерчивания кинематических кривах, оно
содержит модель кулисного механизма с изменяемыми параметрами, состояшего из кривошипа, кулисы и поводка с продольным пазом, перпендикулярного кулисе и связанного с ней зубчато-реечной передачей, ролик, установленный в месте пересечения пазов поводка и кулисы, подвижную бумажную ленту, ведущий транспортирующий валик которой кинематически связан с кривошипом, двух, расположенных над лентой и перемещаемых в
направлении, перпендикулярном ее движению, стержней с пишущими штифта.ми для раздельного вычерчивания на ленте графиков пути и скорости, и крестообразный пантограф, смонтированный на оси кулисы, при этом
стержень с пишущим штифтом для вычерчивання графика скорости связан трособлочной передачей с роликом, а стержень с пишущим штифтом для вычерчивания графика пути связан зубчато-реечной передачей с кулисой.
fus.2