Изобретение относится к сервоприводам, которые могут быть использованы для измерения полупроводниковых иластин диаметром до 150 мм на устройствах для испытания полупроводниковых пластин, при этом полупроводниковая пластина может иметь разную толщину.
Известен сервопривод по авт. св. № 930771.
Однако известное устройство не обеспечивает точности позиционирования . ,
Цель изобретения - повышение точности позиционирования.
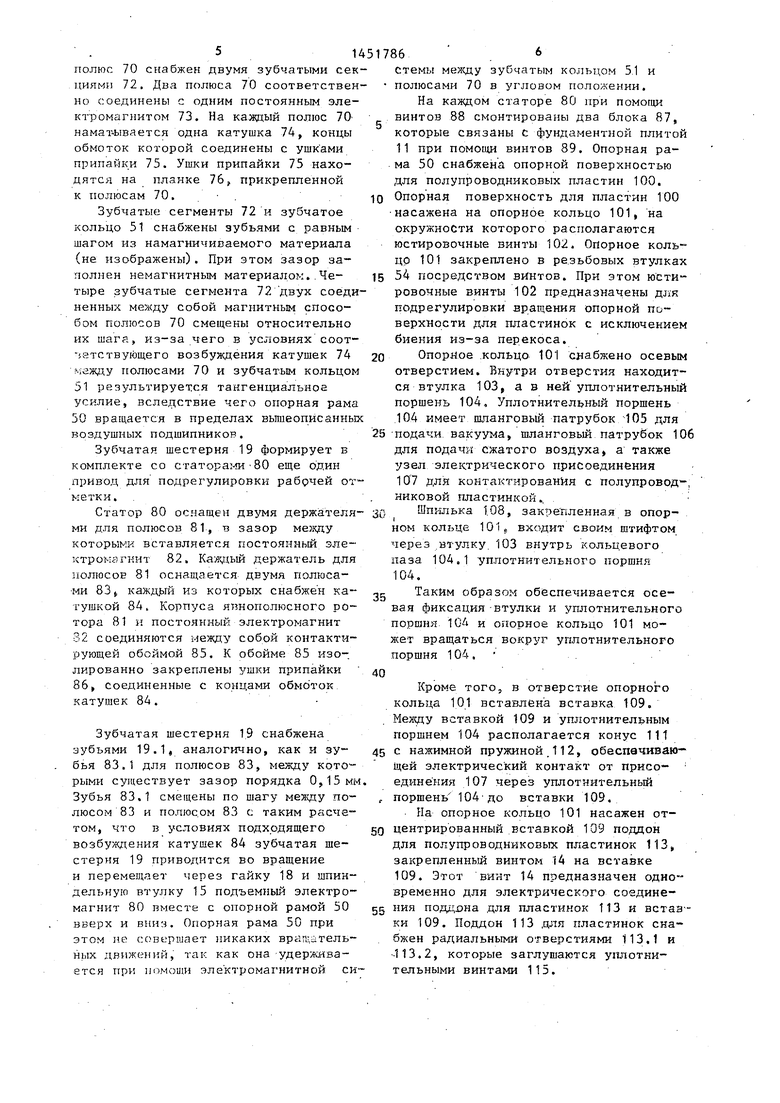
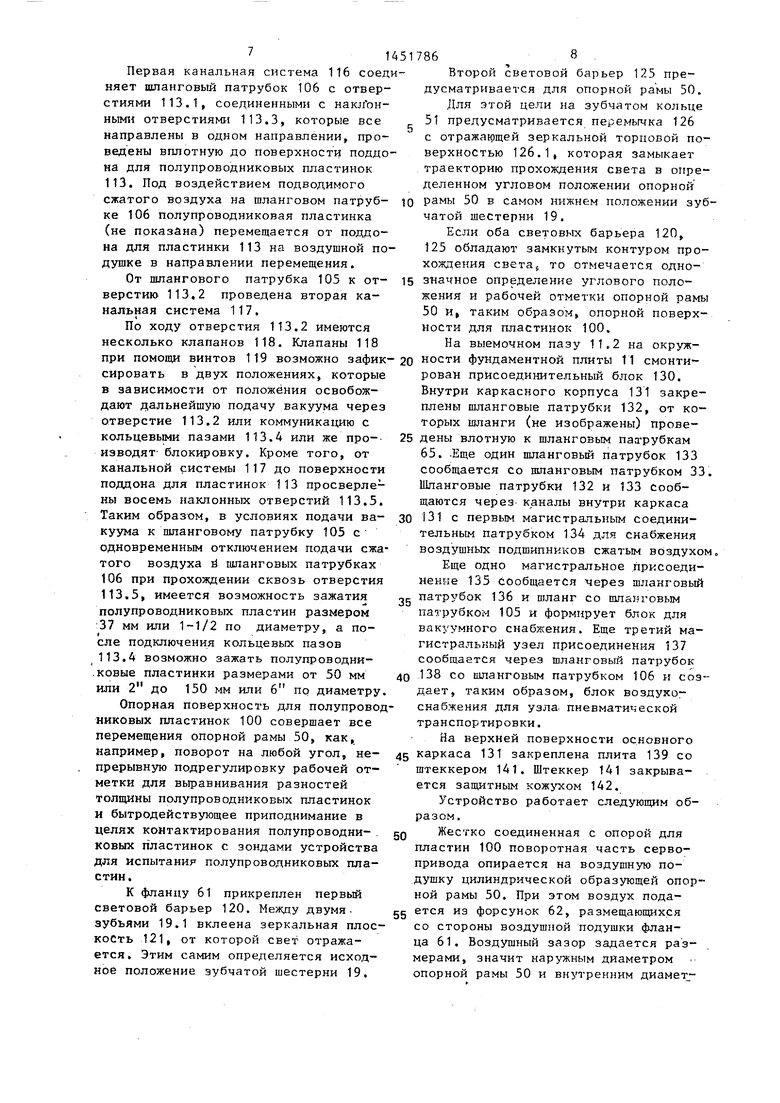
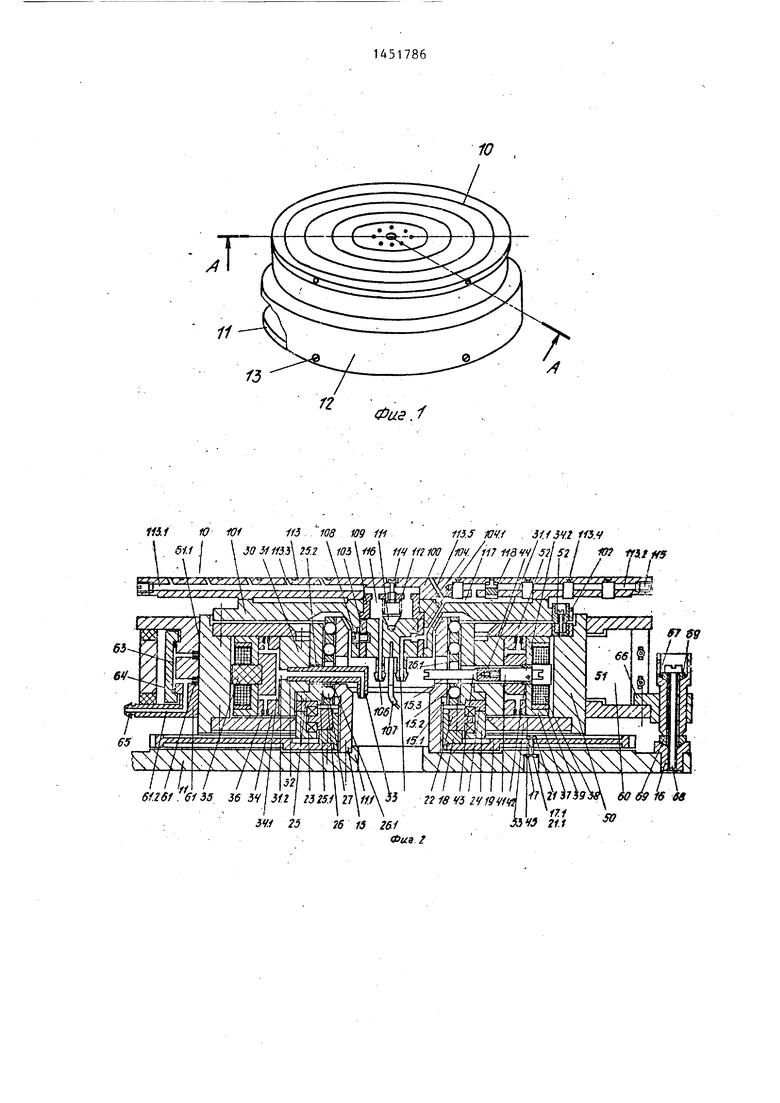
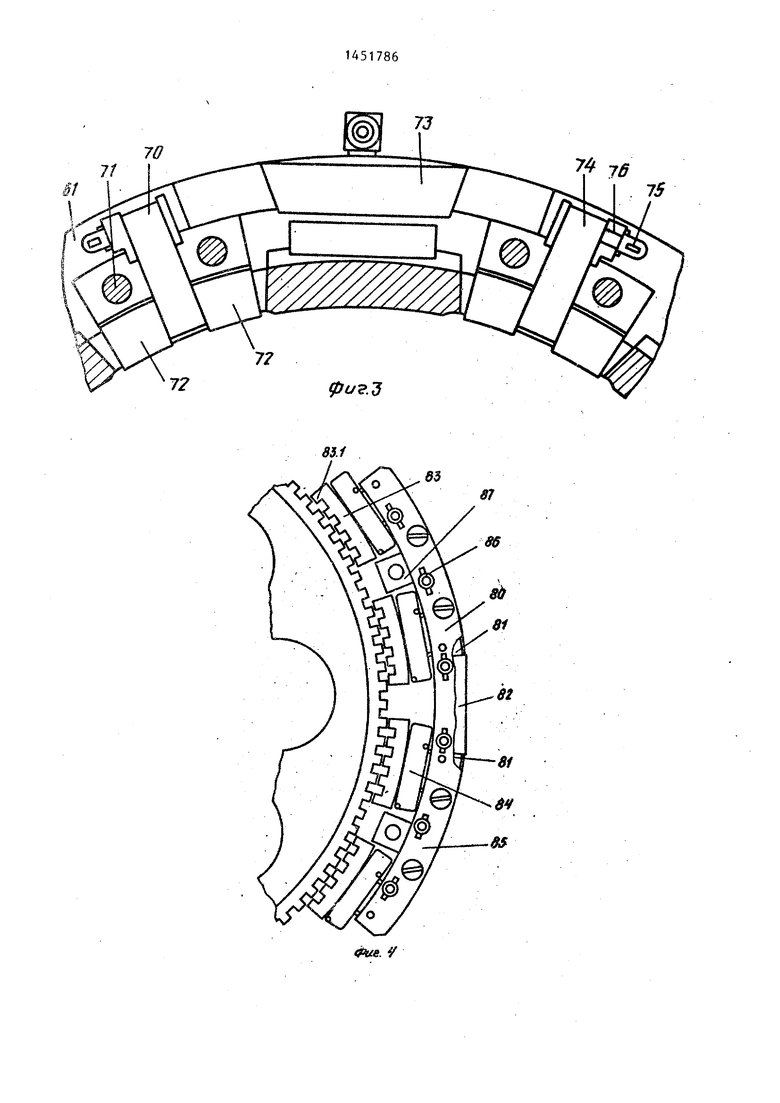
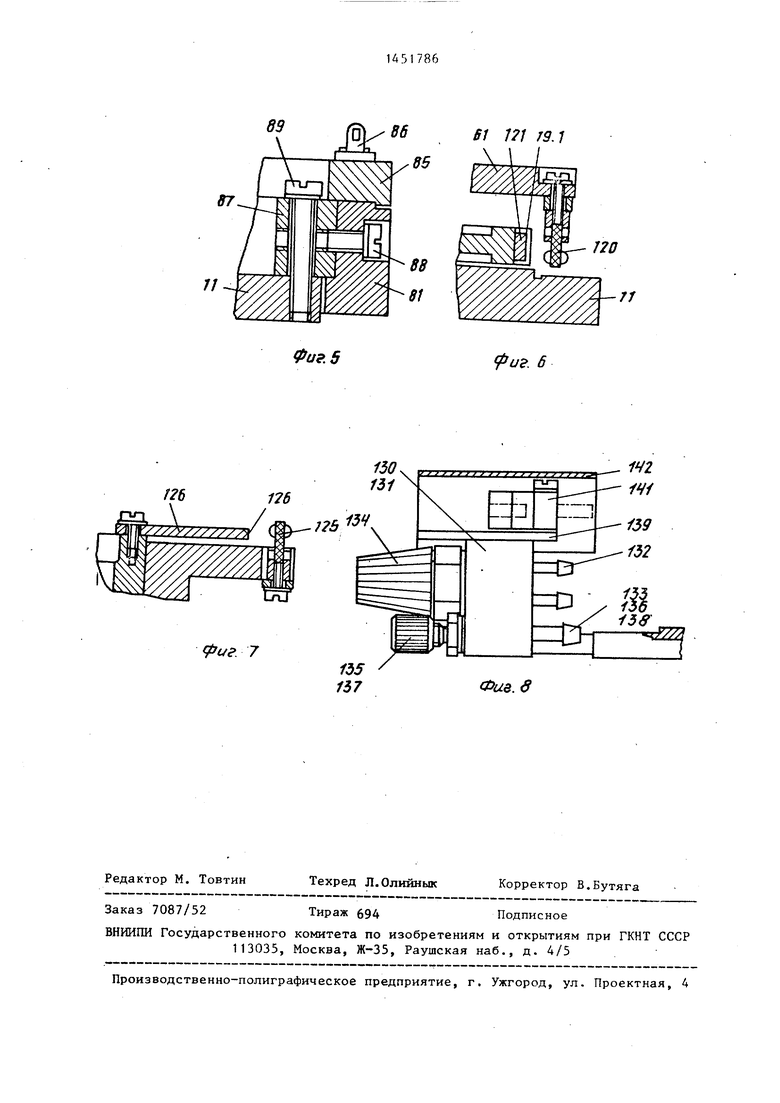
На фиг. 1 дан сервопривод, общий вид; на фиг. 2 - разрез А-А на фиг.1 на фиг. 3 - изображение двух, полюсов уложенных в кольцо подшипника; на фиг. 4 - статор привода для подрегулировки рабочей отметки; на фиг. 5 узел крепления статора для подрегулировки рабочей отметки; на фиг. 6 - первый световой барьер; на фиг, 7 - второй световой барьер; на фиг. 8 - блок присоединения. ..
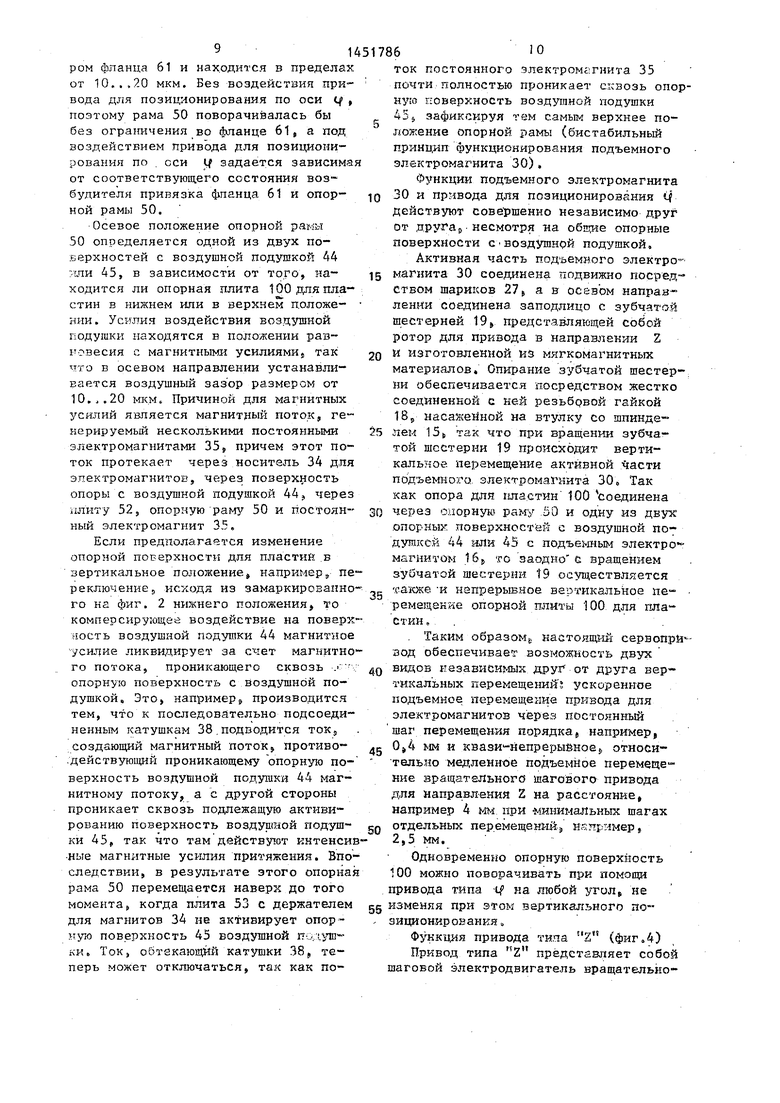
Сервопривод 10 смонтирован на фундаментной плите 11. Он закрыт кожухом 12J закрепленным при помощи винтов 13 на фундаментной плите 11, Фундаментная плита t1 снабжена просверленным центральным отверстием, окаймленным центрирующим буртиком 11.1, Втулка шпинделя 15 насажена на центрирующий буртик 11.1 и прикреплена посредством винтов к фундаментной шште 11. Кроме того, фундаментная плита 11 оснащена резьбовыми втулками 16, предназначенными для закрепления конструктивных элементов, а также первым упорным винтом 17, упорный штифт которого 17.1 выходит за пределы уровня фундаментной плиты 11. Резьбовая втулка 15 снабжена в нижней части наружной резьбой 15,1, в то время как верхняя часть образовывает цилиндрическую опорную поверхность 15.2. Дополнительно к этому верхняя часть просверлена несколькими вертикально располоххенными продольными отверстиями 15.3,
К наружной резьбе 15.1 подогнана гайка 18, к которой прикреплена зубчатая шестерня 19 из магнитомягкого железа. Второй упорный винт 21 прикреплен к зубчатой .шестерне 19 с таким расчетом, чтобы его упорный штифт 21.1 оказывал в условиях дви0
5
0
5
0
5
0
5
0
5
женин вниз зубчатой шестерни 19 через гайку 18 относительно шпиндельной втулки 15 согласованное действие с упорным штифтом 17.1 с тем, чтобы предотвращать дальнейшее вращение.
Гайка 18 снабжена заплечиком, на котором смонтировано кольцо подшипника 22. Кольцо подшипника 22 имеет .верхнюю и нижнюю опорную поверхность, на каждой из которых расположено по одному шаровому кольцу 23. Верхний и нижний соединенные между собой вкладыши подшипников 24 формируют в комплекте с кольцом подшипника 22 к шаровыми кольцами 23 осевой подшипник. На верхний вкладыш подшипника 24 насажена втулка 25, внутреннее отверстие которой вьшолнено в качестве опорной поверхности -25,1.
Между опорными поверхностями 15,2 и 25.1 смонтирован сепаратор шарикоподшипника 26 с шариками 27. Втулка 25, кроме того, снабжена отверстиями 25.2 и сепаратор шарикоподшипника 26 снабжен продольными отверстиями 26,1 согласованными с продольнь1ми отвер стиями 15,3, которые проходят сквозь описываемые в дальнейшем электрические и пневматические проводки.
На заплечик втулки 25 насаживается подъемный электромагнит 30, При этом внутреннее кольцо 31 подъемного электромагнита 30 закрепляется посредством винтов заплечиком на втулке 25 к верхнему вкладышу подшипника 24 (винты показаны условно штрих- пунктирНой линией), Внутреннее кольцо 31 содержит на отметке отверстий 25.2 соответствующие им отверстия 31.8, а также отверстие 31,2 с внутренней резьбой.
В отверстие 31,2 ввинчивается соединительный патрубок 32, проходящий внутрь каждого из отверстий 25.2 и продольных отверстий 26,1 и 15,3 внутрь шпиндельной втулки 15, где закреплен штуцер 33 для шланга. Снаружи внутреннее кольцо 31 обводится магнитодержателем 34, оснащенным постоянным электромагнитом 35,
Магнитодержатель 34 оснащен кэ нальной системой 34.1, соединяющей отверстие 31,2 с концентрически распределенными соплами 36, причем сопла 36 оканчиваются с верхней и нижней стороны магнитодержателя 34, Маг- ниГодержатель 34 ограждается двумя наружными кольцами 37. Внутри форми ;
руемого по одному нар)ужному кольцу 37 н системой постоянных электромагнитов 35 пространства размещается по одной катушке 38 и изолирующему кольцу 39. При этом катушки 38 изолированы подходяпшм образом. Четьфе конца обмоток двух катушек 38 соединены с тремя ушками припайки 41, соответственно вклеенными посредством |Втулок 42 в отверстия 34.2. Входящая внутрь отверстий 31.1 часть ушек припайки 41 снабжается резьбой, на которую навинчивается адаптер 43, входящий во внутреннее пространство шпиндельной втулки 15.
Внутреннее кольцо 31, магнитодер- жатель 34 и соответственно по одному наружному кольцу образовывают верхнюю и нижнюю поверхности 44, 45 воздушного подшипника.
Конфигурация подъемного электромагнита 30 вращательно-симметричная и электромагнит ограждается опорной рамой 50, которая также имеет враща- тельно-симметричную конфигурацию. Опорная рама 50 состоит из зубчатого кольца 51, к которому прикреплены верхняя и нижняя плита 52, 53 в виде опорного кольца. Кроме того, верхняя плита 52 снабжена резьбовьши втулками 54.
Между зубчатым кольцом 50 и постоянными электромагнитами 35 существует воздушный зазор порядка 0,2 ММ., Кроме того, плиты 52, 53 снабжены вентиляционными отверстия- ми (не показаны).
Расстояние плит 52, 53 опорной рамы 50 превышает на 0,4 мм расстояние поверхностей воздушных подшипников 44, 45, из-за чего в результате согласованного действия с постоянными электромагнитами 33 получаются два стойчивых положения опорной рамы 50 о отношению к подъемному электромагиту 30, а именно, верхнее и нижнее оложения. За счет импульсов, подааемых на катушки 38, производится ереключение опорной рамы 50 между боими положениями.
При подаче сжатого воздуха на ланговые штуцера 38 в зависимости
К фланцу 61 прикреплены четыре ножки 66, в которые ввинчиваются по одной втулке 67. При этом отметка ввинчивания кольца подшипника 60 мо жет быть отрегулирована при помощи втулок 67 с фиксацией положения. По 50 еле центровки кольца подшипника 60 при помощи воздушных подшипников кольцо подшипника 60 считается привинченным посредством втулок 67 при помощи винтов 67 и прокладок в виде
от выбранного устойчивого положения шаровидных сегментов 69 к резьбовым между поверхностью 44 воздушного под- втулкам 16. шипника м плитой 52 или между поверхностью 45 воздушного подшипника и плитой 53 при помопд сопла 36 образо В проемных фасках фланца 61 размещаются полюсы 70, закрепленные штифтами 71 во фланце 61. Каждый
нывается воздушный подшипник с зазором 10-20 мкм.
При переключении катушек 38 опор- ная рама 50 переходит из одного положения в другое, образовываю1дийся воздушный подшипник действует в качестве амортизатора, вследствие чего переключение осуществляется при малых ю вибрациях или безвибрационно.
Опорная рама 50 образовывает в комбинации с зубчатым кольцом 51 электродвигатель, смонтированньп « в кольце подшипника 60. Один фланец 15 .61 кольца подшипника 60 охватывает зубчатое кольцо 51.Фланец 61 снабжей по периферийной окружности восемью фасками, после чего сохраняются 8 поверхностей 61.1. Между фланцем 20 61 и зубчатым кольцом 51 существует зазор порядка 10-20 мк для воздушного подшипника. На поверхностях 61.1 расположены сопла 62, соединяющие зазор с распределительной камерой 63 . 25 Распределительная камера 63 уплотняется при помощи плиты 64. Для каждой из восьми распределительных камер предусматривается во фланце 61 канальная система 61.2, соединенная 0 со шланговым штуцером 65.
На основании вращательно-симмет- ричного выполнения опорной рамы 50 опорная рама 50 может вращаться вокруг подъемного электромагнита 30, jg причем опорная рама 50 удерживается в восьми воздушных подшипниках между зубчатым кольцом 51 и поверхностями 61.1 радиально, а в осевом положении, соответственно, в одном возд тином Q подшипнике между поверхностью воздушного подшипника 44 и плитой 52 или поверхностью воздушного подшипника 45 и плитой 53.
К фланцу 61 прикреплены четыре ножки 66, в которые ввинчиваются по одной втулке 67. При этом отметка ввинчивания кольца подшипника 60 может быть отрегулирована при помощи втулок 67 с фиксацией положения. По- 0 еле центровки кольца подшипника 60 при помощи воздушных подшипников кольцо подшипника 60 считается привинченным посредством втулок 67 при помощи винтов 67 и прокладок в виде
5
шаровидных сегментов 69 к резьбовым втулкам 16.
шаровидных сегментов 69 к резьбовым втулкам 16.
В проемных фасках фланца 61 размещаются полюсы 70, закрепленные штифтами 71 во фланце 61. Каждый
51451786 6
полюс 70 снабжен двумя зубчатыми сек- стемы между зубчатым кольцом 5.1 и циямп 72. Два полюса 70 соответствен- полюсами 70 в угловом положении.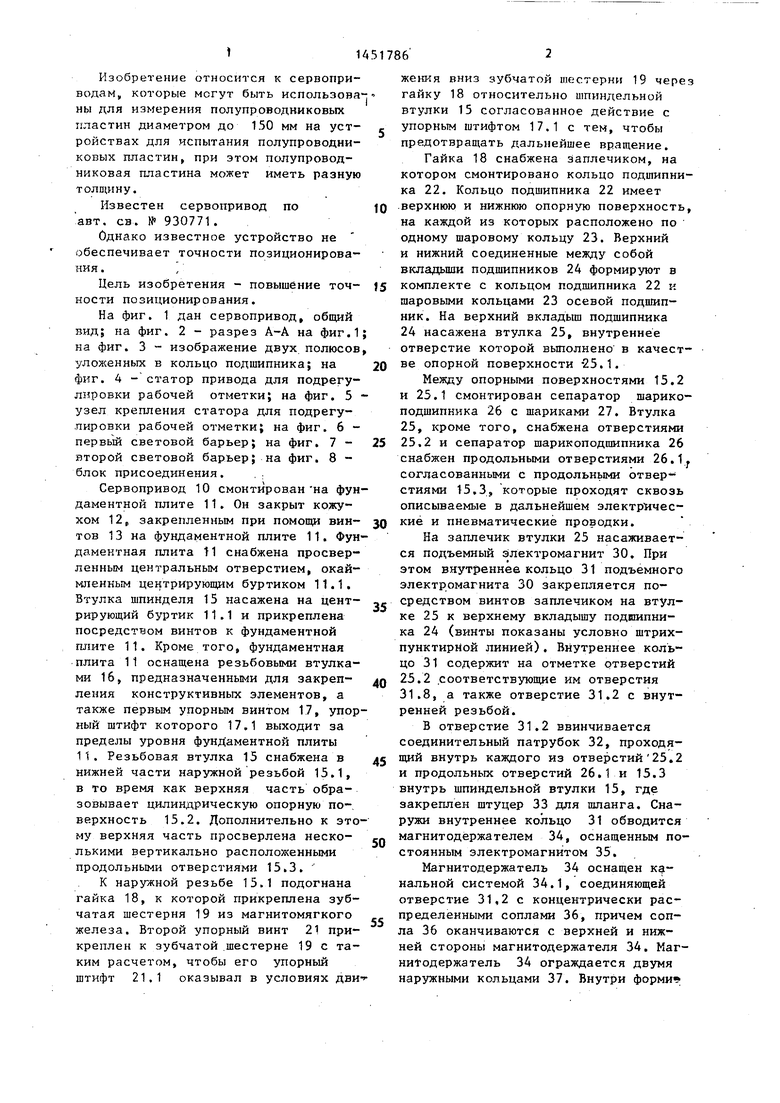


| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2415780C1 |
| НЕСУЩИЙ ВИНТ | 2005 |
|
RU2296697C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВУМЯ ВОЗДУШНЫМИ ВИНТАМИ ПРОТИВОПОЛОЖНОГО ВРАЩЕНИЯ НА ВЕРТИКАЛЬНОЙ ОСИ | 2009 |
|
RU2520263C2 |
| Приспособление для углового графления печатных валов ситцепечатных машин | 1937 |
|
SU54460A1 |
| Электрическая пишущая машина | 1929 |
|
SU23994A1 |
| СПОСОБ И ПРИБОР ДЛЯ МАССОВОЙ ПРОВЕРКИ ШАГА ХОДОВЫХ ВИНТОВ | 1928 |
|
SU18402A1 |
| Система активного контроля | 1986 |
|
SU1414592A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО НАРУЖНОЙ ПОВЕРХНОСТИ ТРУБОПРОВОДА | 1992 |
|
RU2061612C1 |
| АДРЕСОПЕЧАТАЮЩАЯ МАШИНА | 1926 |
|
SU7357A1 |
| Устройство для укладки короткозамкнутых витков в пазы магнитопровода электрических машин | 1983 |
|
SU1169089A2 |
Изобретение относится к области электроники и может быть использовано для испытания полупроводниковых . пластин. Сервопривод имеет планшайбу, установленную на шпиндельной втулке, имеющей цилиндрическую опорную по верхность и наружную резьбу, к которой подогнана гайка, скрепленная с зубчатой шестерней. На заплечике гайки смонтировано подшипниковое кольцо с цилиндрическим корпусом и размещенным внутри него подъемным электромагнитом. Опорная рама вместе с зубчатым колесом образует электродвигатель, смонтированньй в кольце подшипника, на фланце которого по периферийной окружности имеются восемь фасок, в которые вставлены полюсы с двумя зубчатыми секциями; Подъемный электромагнит и постоянный электромагнит ограждены опорной рамой, имеющей верхнюю и нижнюю плиты соответственно. Имеющийся воздушный зазор при вращении опорной рамы за счет переключения катушек электромагнита образует воздушный подшипник, действующий в качестве амортизатора, вследствие чего переключение осуществляется при малых вибрациях или безвибрационно. Зубчатая шестерня формирует в комплекте со статором еще один привод для подрегулировки рабочей отметки. Она имеет зубья, аналогичные зубьям, размещенным на полюсах статора, которые смещены между собой по шагу с таким расчетом, что в условиях подходящего возбуждения катушек статора зубчатой шестерни приводится во вращение и перемещает через гайку и шпиндельную втулку подъемный электромагнит статора вместе с опорной плитой вверх и вниз. При этом опорная плита не совершает никаких вращательных движений, так как она удерживается при помощи электромагнитной системы между зубчатым колесом и двумя полюсами фланца. Сервопривод имеет повышенную точность позицирования. 10 з.п.ф-лы, 8 ил. о tm СП 00
но соединены с одним постоянным электромагнитом 73. На кадцый полюс 70 намат-ывается одна катушка 74, концы обмоток которой соединены с ушк ами припайки 75. Ушки припайки 75 находятся на планке 76, прикрепленной к полюсам 70. .
Зубчатые сегменты 72 и зубчатое кольцо 51 снабжены зубьями с равным шагом из намагничиваемого материала (не изображены). При этом зазор заполнен немагнитным материалом..Четыре зубчатые сегмента 72 двух соединенных между собой магнитным способом полюсов 70 смещены относительно их шага, из-за чего в условиях соот- }етствующего возбуж,цения катушек 74 мгжду полюсами 70 и зубчатым кольцом 51 результируется тангенциальное усилие, вследствие чего опорная рама 50 вращается в пределах вышеописанны воздушных подшипников.
Зубчатая шестерня 19 формирует в комплекте со статора;-1и 80 еще о дин привод для подрегулировки рабочей отметки.
Статор 80 оснащен двумя держателями для полюсов 81, в зазор между которыми вставляется постоянный электромагнит 82. держатель для иолюсоЕ 81 оснащается двумя полюса- ми 83 (, кажд)1й из которых снабжен катушкой 84. Корпуса явнополюсного ротора 81 и постоянный электромагнит 32 соединяются между собой контактирующей обоймой 85. К обойме 85 изолированно закреплены ушки припайки 86, соединенные с концами обмо ток. катушек 84.
Зубчатая шестерня 19 снабжена зубьями 19.1, аналогично, как и зубья 83,1 для полюсов 83, между которыми существует зазор порядка 0,15мм Зубья 83.1 смещены по шагу между полюсом 83 и полюс.ом 83 с таким расчетом, что в условиях подходящего возбуждения катушек 84 зубчатая ще- стерня 19 приводится во вращение и перемещает через гайку 18 и шпиндельную втулку 15 подъемный электромагнит 80 вместе с опорной рамой 50 вверх и вниз. Опорная рама 50 при этом не совершает никаких врап-,атель- ных движений, так как она удерживается при И1:)мощи электромагнитной си
На каждом статоре 80 при помогци винтов 88 смонтированы два блока 87, которые связаны с фундаментной плитой 11 при ПОМО1ДИ винтов 89. Опорная рама 50 снабжена опорной поверхностью для полупроводниковых пластин 100.
Опорная поверхность для пластин 100 насажена на опорное кольцо 101, на окружности которого располагаются юстировочные винты 102. Опорное кольцо 101 закреплено в резьбовых втулках
54 посредством винтов. При этом юстировочные винты 102 предназначены для подрегулировки вращения опорной поверхности для пластинок с исключением биения из-за перекоса.
Опорное .кольцо 101 снабжено осевым отверстием. Внутри отверстия находится втулка 103, а в ней уплотнительный поршень 104, Уплотнительный поршень .104 имеет шланговый патрубок -105 для
подачи вакуума, шланговый патрубок 106 для подачи сжатого воздуха, а также узел электрического присоединения 107 для контактирования с полупровод-, никовой пластинкой.. .
Шпилька 1.08, закре пленная в опор- . ном кольце 10 К входит своим штифтом через .втулку.103 внутрь кольцевого паза 104.1 уплотнительного поршня
.1 rv у
I ,
Таким образом обеспечивается осевая фиксация-втулки и уплотнительного поршня. 104 и опорное кольцо 101 может вращаться вокруг уплотнительного поршня 104,
Кроме того, в отверстие опорного кольца 101 вставлена вставка 109, Между вставкой 109 и ушютнительным поршнем 104 располагается конус 111
с нажимной пружиной.112, обеспечивающей электричес кий контакт от присо- единения 107 через уплотнительный поршень 104-до вставки 109.
На опорное кольцо 101 насажен отцентрир ованный вставкой 109 поддон для полупроводниковых пластинок 113, закрепленньй винтом 14 на вставке 109. Этот винт 14 предназначен одновременно для электрического соединения подддна для пластинок 113 и встааки 109. Поддон 113 для пластинок сна- бжен радиальными отверстиями 113,1 и -113,2, которые заглушаются унлотни- тельными винтами 115,
Первая канальная система 116 соедняет шланговый патрубок 106 с отверстиями 113.1, соединеннымн с наклЪн- ными отверстиями 113.3, которые все направлены в одном направлении, проведены вплотную до поверхности поддона для полупроводниковых пластинок 113. Под воздействием подводимого сжатого воздуха на шланговом патрубке 106 полупроводниковая пластинка (не показана) перемещается от поддона для пластинки 113 на воздушной подушке в направлении перемещения.
От шлангового патрубка 105 к отверстию 113,2 проведена вторая канальная система 117,
По ходу отверстия 113.2 имеются несколько клапанов 118. Клапаны 118
при помощи винтов 119 возможно зафик- 20 ности фундаментной плиты 11 смонтисировать в двух положениях, которые в зависимости от положения освобождают дальнейшую подачу вакуума через отверстие 113.2 или коммуникацию с кольцевьми пазами 113.4 или же производят блокировку. Кроме того, от канальной системы 117 до поверхности поддона для пластинок 113 просверлены восемь наклонных отверстий 113.5. Таким образом, в условиях подачи вакуума к шланговому патрубку 105 с одновременным отключением подачи сжатого воздуха и пшанговых патрубках 106 при прохождении сквозь отверстия 113.5, имеется возможность зажатия полупроводниковых пластин размером мм или 1-1/2 по диаметру, а после подключения кольцевых пазов 113.4 возможно зажать полупроводни- .ковые пластинки размерами от 50 мм или 2 до 150 мм или 6 по диаметру.
Опорная поверхность для полупроводниковых пластинок 100 совершает все перемещения опорной рамы 50, как.
например, поворот на любой угол, не- 45 каркаса 131 закреплена плита 139 со
прерывную подрегулировку рабочей отметки для выравнивания разностей толщины полупроводниковых пластинок и бытродействующее приподнимание в целях контактирования полупроводни- . ковых пластинок с зондами устройства для испытания полупроводниковых пластин.
К фланцу 61 прикреплен первый световой барьер 120. Между двумя- зубьями 19.1 вклеена зеркальная плоскость 121, от которой свет отражается. Этим самим определяется исходное положение зубчатой шестерни 19.
штеккером 141. Штеккер 141 закрывается защитным 142.
Устройство работает следующим образом.
5Q Жестко соединенная с опорой для пластин 100 поворотная часть сервопривода опирается на воздушную подушку цилиндрической образующей опор ной рамы 50. При этом воздух пода55 ется из форсунок 62, размещающихся со стороны воздушной подушки фланца 61. Воздушный зазор задается размерами, значит наружным диаметром опорной рамы 50 и внутренним диаметВторой световой барьер 125 предусматривается для опорной рамы 50. Для этой цели на зубчатом кольце 51 предусматривается перемычка 126 с отражак)щей зеркальной торцовой поверхностью 126.1, которая замыкает траекторию прохождения света в определенном угловом положении опорной рамы 50 в самом нижнем положении зубчатой шестерни 19.
Если оба световых барьера 120, 125 обладают замкнутым контуром прохождения света,; то отмечается одно- злачное определение углового положения и рабочей отметки опорной рамы 50 и, таким образом, опорной поверхности для пластинок 100.
На выемочном пазу 11.2 на окружрован присоединительный блок 130. Внутри каркасного корпуса 131 закреплены шланговые патрубки 132, от которых шланги (не изображены) проведены влотную к шланговым патрубкам 65. .Еще один шланговый патрубок 133 сообщается со пшанговым патрубком 33. Шланговые патрубки 132 и 133 сообщаются через каналы внутри каркаса
131 с первым магистральным соединительным патрубком 134 для снабжения воздушных подшипников сжатым воздухом.
Еще одно магистральное присоединение 135 сообщается через шланговый
патрубок 136 и шланг со шланговым патрубком 105 и формирует блок для вакуумного снабжения. Еще третий магистральный узел присоединения 137 сообщается через шланговый патрубок
138 со шланговым патрубком 106 и созает, таким образом, блок воздуко- набжения для узла пневматической ранспортировки.
На верхней поверхности основного
штеккером 141. Штеккер 141 закрывается защитным 142.
Устройство работает следующим образом.
5Q Жестко соединенная с опорой для пластин 100 поворотная часть сервопривода опирается на воздушную подушку цилиндрической образующей опорной рамы 50. При этом воздух пода55 ется из форсунок 62, размещающихся со стороны воздушной подушки фланца 61. Воздушный зазор задается размерами, значит наружным диаметром опорной рамы 50 и внутренним диаметром фланца 61 и находится в пределах от 10...20 мкм. Без воздействия привода для позиционирования по оси Cf , поэтому рама 50 поворачивалась бы без ограничения во фланце 61, а под воздействием привода для позиционирования по . оси 1 задается зависима от соответствующего состояния возбудителя привязка фпанца 61 и опорной рамы 50.
- Осевое положение опорной рамы 50 определяется одной из двух поверхностей с воздушной подзплкой 44 /ши 45, в зависимости от того, находится ли опорная плита 1бОдляпла- стин в нижнем или в верхнем положе- НИИ. Усилия воздействия воздушной подушки находятся в положении равновесия с магнитными усилиями так что в осевом направлении устанавливается воздушный зазор размером от 10...20 мкм. Причиной для магнитных усиотий является магнитный поток, ге- керируемьй несколькими постоянными электромагнитами 35, причем этот поток протекает через носитель 34 для электромагнитов, через поверхность опоры с воздушной подушкой 44, через плиту 52, опорную рамз 50 и постоянный электромагнит 35,
Если предполагается изменение опорной поверхности для пластин .в зертикальное положение например пе реключенивд исходя из замаркировапно го на фиг. 2 нижнего положения, то комперсирушщее воздействие на поверхность воздушной подутаки 44 магнитное усш1ие ликвидирует за счет магнитного потока, проникающего сквозь . опорную поверхность с воздушной подушкой. Это, например5 производится тем, что к последовательно подсоединенным катушкам 38,подводится TOKj создающий магнитный поток противо- .действующий проникающему опорную поверхность воздушной подушки 44 магнитному потоку, а с другой стороны проникает сквозь подлежащую активированию поверхность воэду111ной подуш ки 45, так что там действуют кнтенсив ные магнитные усилия притяжения. Впоследствии, в результате этого опорная рама 50 перемещается наверх до того
Одновременно опорную поверхност 100 можно поворачивать при помощи привода типа -Lf ка любой угол не
моментаJ когда плита 53 с держателем gg изменяя при этом вертикального подля магнитов 34 не активирует опор кую поверхность 45 воздушной ки. Ток, обтекающий катушки 38,, теперь может отключаться, так как позициониройанкя„
Функ цмя привода типа Z (фиг.4) Привод типа Z представляет соб
шаговой электродвигатель вращательк
ток постоянного электромс гнита 35 почти полностью проникает сквозь опор- нуш поверхность воздушной подушки 455 зафикскруя гем самьп г верхнее положение опорной рамы (бистабильный принцип функционирования подъемного электромагнита 30),
Функции подъемного электромагнита
30 и привода для позиционирования Ц действуют сове ршенно независимо друг от друга S, несмотря v.a общие опорные поверхности С воздушной подушкой. ; Активная часть подъемного электромагнита 30 соединена подвижно посред- ством шариков 27 а в осевом направлении соединена заподлицо с зубчатой шестерней 19, представляющей собой ротор для привода в направлении Z
И изготовленной из мягкомагнитных
материалов, Опирание зубчатой шестер- йи обеспечивается посредством жестко соединенной с ней резьбовой гайкой 185, насажейной на втулку со шпинделеи iSfe так что при вращении зубчатой шестерни 19 происходит вертикальное, перемещение активной . части подъемного, электромагнита 30. Так как опора для гша.стин 100 соединена
через опорную раму .50 и одну из двух опорных поверхностей с воздушной по- душксй 44 ш1й 45 с пoдъeIvшьм электро - магнитом 16} то заодно с вращением зубчатой шестерни t9 осуществляется
т-аюке -и напрерывное вертикальное пе- . ремещенне опорной плиты 100. для пластин .
. Таким образоМ(; настоящ1-1й сервопри -- зод обеспечивает возможность двух
видов иезависимых дру.т от друга вертикальных перемещений ; ускоренн-ое подъемное перемещение привода для электромагнитов через постоянный шаг перемещения порядка, например,
квази -непрерыйное относи тельно медленное подъемное перемещение вращательного шагового привода для направления Z на расстояние, например 4 мм. при минимальных шагах
отдельных перемещений-э Нйг ример, 2,5 мм.
Одновременно опорную поверхность 100 можно поворачивать при помощи ривода типа -Lf ка любой угол не
зменяя при этом вертикального позициониройанкя„
Функ цмя привода типа Z (фиг.4) Привод типа Z представляет собой
шаговой электродвигатель вращателько1
го ТИпа. На образующей дискообразного ротора 19 размещаются зубья. Статор 80 оснащен четырьмя полюсами 83 из магнитно-мягкого железа, каждый- из которых оснащен катушкой 84 и отделенные от ротора 19 зазором от приблизительно 0,1-0,2 мм. Полюса из магнитно-мягкого железа также снабжены зубьями 83.1 с шагом зацепления Т ротора 19, причем зубья четырех полюсов однако смещены относительней друг друга на шаг примерно 0,25 Т, Oj5 Т и 0,75Т. Постоянный электро- магниг 82 создает электромагнитный поток, поступающий через два полюса и зазор в ротор 19, протекает там приблизительно тангенциально до остальных двух полюсов, а через них снова поступает в постоянный эле ктромагнит 82.
За счет токов в катушках 83 . которые могут воспринимать значения «1, Of -1, зубья ротора перемещаются
1
в определенное положение относительно 25 имеют такой же шаг между зубьями, статорных зубьев. Так, например, для иллюстрированного на фиг. 4 положе- ния зубьев для обоих верхних полюсов может приниматься катушечный ток
it 12 Оц ДЛЯ катушки 84 - ток i ,
+1 и для катушки нижнего полюса - ток id- -1. Если теперь токовая нагрузка четырех катушек измегшется
что и опорная рама, и аналогично, как для привода Z согласно фиг.4. между поверхностями полюсов имеетс разное смещение шага между зубьями
30 В осевом направлении поверхность р стра шага опорной рамы превышает д ну сегментов с зубьями 72 на велич ну перемещения в направлении оси Z для того, чтобы обеспечивать одина вый эффект усилия для всех положен Z.
от
ib
i.f
О, i , О, -1, i .+1,
13 +1,
i3 О,
- -1
- 5
О,
то ротор перемещается на 0,25 Т шага (в фиг. 4 это будет в направлении наверх) , т.е. теперь зубья ротора будут находиться в диаметрально противоположном положении относительно зубьев второго полюса. Еще одно изменение токовой нагрузки в
i 1 О, i - О, i 3 -1, i 4 1 вызывает дополнительное вращение ротора в направлении наверх на. шаг 0,25 Т.
Функция электромагнитного привода выбрасывателя.
Электромагнитный привод действует как бистабильная система привода и требует для управления не статический сигнал, а только электрические импульсы, полярность которых совпадает с нужным направлением перемещения. Преимуществом является отсутствие энергопотребления в обоих ста- бильных положениях покоя.
Конструктивно опорные поверхности под воздушной подушкой выполнены так
45178612
что в конце перемещения за счет сжатия воздуха между поверхностями имеет место зффективное заторможение перемещения, а также подавление вредных вибраций отскока.
Функция привода для направления Lf. Функциональный принцип привода t/ по принципу в максимально возможной
10 степени соответствует принципу, описанному для привода типа Z. Показанная в фиг. 3 конструкция показывает постоянный электромагнит 73, поток которого в обе стороны разби15 вается на 2 сегмента с зубьями 72. Опорная рама 51 представляет собой ротор, изготовленный из магнитно- мягкого материала и который на цилиндрической образующей имеет тон20 кое зацепление с щагом примерно
0,6 мм (не показано). Пазы между зубьями -заполнены не намагничиваемым термореактивным материалом. Сегменты с зубьями 72 поверхностей полюсов
имеют такой же шаг между зубьями,
что и опорная рама, и аналогично, как для привода Z согласно фиг.4. между поверхностями полюсов имеется разное смещение шага между зубьями.
В осевом направлении поверхность растра шага опорной рамы превышает длину сегментов с зубьями 72 на величину перемещения в направлении оси Z для того, чтобы обеспечивать одинаковый эффект усилия для всех положений Z.
За счет благоустроенного управления протека токов в катушках 74 отдельн1 ж полюсов аналогично, как
ДЛЯ привода Z, возможно шаговое
(индексируемое) вращательное движение ротора (опорной рамы 50) относительно полюсов, в отчпичие от привода Z, где для тока в катушках возможны только 3 режима +1, О, -1, для привода М катушечные токи изменя-- ютсй только в очень небольших интервалах. Изменение (подрегулировка) происходит почти непрерывно в положительном и отрицательном диапазоне предельных токов.
Формула изобретения
ханизмы подъема и поворота планшайбы с электромагнитными элементами, ферромагнитными гребенками, воздушны демпфирующим подшипником и диском, отличающийся тем, что, с целью повышения точности позицио- кирования, он снабжен подшипниковым кольцом с выемками и с расположенным внутри него цилиндрическим корпусом с верхней и нижней опорными плитами и подъемным электромагнитом, размещенным внутри корпуса, при этом электромагнитные элементы механизма вращения планшайбы размещены в выемках подшипникового кольца, а одна из ферромагнитных гребенок размещена на поверхности корпуса с возможностью взаимодействия с электромагнитными элементами механизма вращения, причем электромагнитные элементы механизма вертикального перемещения планшайбы размещены на основании, а вторая ферромагнитная гребейка выполнена на цилиндрической поверхности диска, уста- новленного на птиндельной втулке с возможностью вращения и кинематически связанного с подъемным электррмагни- том.
, Сервопривод по п, 1, отличающийся тем, что подъемный электромагнит выполнен с верхней м нижней опорными поверхностями, на которых на равномерно распределенных расстояниях выполнены воздушные сопла для соединения с системой подачи воздуха, причем подъемный электромагнит установлен с возможностью взаимодействия с верхне- и нижней опорными плитами корпуса,
А. Сервопривод по п. 1, отличающийся тем, что диск с ферромагнитной гребенкой снабжен гай
м ю 1520- 2& и
30
i
.
35
40
78614
кой, навинченной на наружную резьбу шпиндельной втулки.
//
f3
1Ш to -foi n5 т т mus.j юч.( . 3f/jvf ffs.v
Sl.i JO }i .2 ИЧ iiiiOO j-ff./inUB / l Sllsil «
6U6i . 6i 35 36 54 Ш 23 2S. 27 11 S 22 i8 «3 2419VI
5Ч.1 25 26 15 2&i
Фиа /
Фие .
ffsg
68
SO
70
11
7J
7
76
75
в5
SI
Фи&.
Фи.5
бт
ZZZZZZZ22 ft
fpue. 7
86
иг. 6
Фаз.