Изобретение относится к устройству несущих винтов и средствам управления ими.
Предлагаемый несущий винт может быть использован и строительстве разного рода летательных аппаратов с вертикальным взлетом и посадкой. Несущий винт способен создавать одновременно подъемную силу и тягу, необходимую для осуществления поступательного движения вертолета. С помощью несущего винта осуществляется продольное и поперечное управление вертолетом.
В настоящее время на вертолетах применяются три типа несущих винтов:
а/ несущий винт с шарнирным креплением каждой лопасти к втулке;
б/ несущий винт на кардане;
в/ несущий винт с "жестким" креплением лопастей к втулке.
Несущий винт по пункту /а/ содержит втулку с шарнирным креплением лопастей посредством горизонтального, вертикального и осевого шарнирами.
Несущий винт по пункту /б/ состоит из лопастей, втулки с общим горизонтальным шарниром и осевыми шарнирами лопастей.
Несущий винт по пункту /в/ имеет только осевой шарнир, относительно которого лопасти поворачиваются управляющим гироскопом.
Устройство известных несущих винтов и управление ими опубликованы в справочных пособиях на стр.8, 166, 334 "Словарь-справочник по механизмам" А.Ф.Крайнева, Москва. "Машиностроение", а также см. стр.31-41 "Конструкция вертолетов", Богданов Ю.С. "Машиностроение". Москва. 1990. и Тиняков Г.А. "Пилотирование вертолета". стр.104-106. Воениздат. Москва. 1960 г.
Наиболее простой несущий винт с автоматом переноса включает в себя пустотелый ведомый вал с крестовиной, к которой крепятся лопасти посредством горизонтального, вертикального и осевого шарниров. Каждая лопасть снабжена поводком поворота. На ведомом валу установлено зубчатое колесо, через которое передается вращение на валу. Поводки поворота соединены посредством рычагов и шарниров с крестовиной автомата переноса, которая посредством рычага, установленного внутри вала в шаровом шарнире, совершает продольные и поворотные движения для управления углом поворота у лопастей, в результате этих движений происходит изменение общего шага или циклического шага несущего винта.
Недостатком известных несущих винтов является то, что тягу в циклическом режиме создают не все лопасти, а только те, которые находятся в верхней половине общего круга /диска/, находясь в нижней части круга, лопасти не работают и в большей части своей находятся с минимальным углом поворота. В этом положении лопасти работают с отрицательным эффектом - на торможение. Ветер взаимодействует с площадью лопастей и корпусом вертолета и вертолет сносится ветром. В результате снижается скорость полета, дальность полета и увеличивается расход топлива.
Установлено также, что различие величин тяги на азимутах  и
и  создают кренящий момент относительно продольной оси несущего винта /см. стр.33 "Конструкция вертолетов ". Богданов Ю.С./
создают кренящий момент относительно продольной оси несущего винта /см. стр.33 "Конструкция вертолетов ". Богданов Ю.С./
Для ликвидации этого недостатка было применено шарнирное крепление лопасти к втулке. Это создало возможность махового движения лопасти относительно горизонтального шарнира. Лопасть при маховом движении совершает удар по воздушной среде, при этом испытывает повышенные динамические нагрузки и переменную скорость вращения относительно горизонтального шарнира. Для уменьшения махового движения лопасти относительно горизонтального шарнира применяется регулятор взмаха.
Таким образов, при поступательном движении под действием переменных, аэродинамических и инерционных сил лопасти испытывают изгиб и совершают колебания относительно горизонтальных и вертикальных шарниров, а также относительно осевых шарниров. Все это приводит к повышенным требованиям к изготовлению несущего винта.
Из всего сказанного выше следует то, что использовать циклический режим для изменения углов установки лопастей невыгодно. Лопасти с циклическим шагом подвергаются разного рода динамическим нагрузкам и работают неэффективно.
Для осуществления вертикального и поступательного движения, а также для осуществления продольного и поперечного управления вертолетом и с целью исключения циклического режима несущего винта предлагается устройство несущего винта с качающимися лопастями по вертикальной плоскости, действующие по принципу двухплечего рычага, с автоматической установкой общего угла поворота лопастей.
Изменение направления тяги несущего винта достигается за счет наклона диска окружности лопастей относительно вертикальной оси ведомого вала. Управление наклоном диска лопастей осуществляется автоматом перекоса, действующий на электромагнитном принципе.
Устранение кренящего момента, возникающего на азимуте π/2 относительно азимута 3π/2, достигается за счет того, что лопасти снабжены триммерами, выполненными в виде узкой поперечной лопасти /пластины/, установленными на комлевых обтекателях.
Задачей, на решение которой направлено данное изобретение, является упращение конструкции и повышение тяги несущего винта.
Поставленная задача решается за счет того, что пустотелый ведомый вал крепится к корпусу разъемной головки посредством фланца, выполненного на наружном конце ведомого вала. Лопасти крепятся посредством своих наконечников к наконечникам двуплечих рычагов, имеющим цилиндрическую форму с выполненными кольцеобразными выступами в средней части. Двуплечие рычаги снабжены осевым и горизонтальным шарнирами. Осевым шарниром служит радиально-упорный подшипник, который внутренней обоймой упирается в кольцеобразный выступ, а наружной обоймой закреплен в корпусе подшипника, который служит горизонтальным шарниром, для этой цели корпус снабжен пальцами, расположенными с противоположных сторон корпуса в горизонтальной плоскости, которые взаимодействуют с подшипниками /или вкладышами/, установленными в стенках корпуса головки. На внутренних концах двуплечих рычагов закреплены поводки управления углом поворота этих рычагов, которые в свою очередь, соединены посредством рычагов и шарниров с шаровыми цапфами, выполненными по краям качающейся тарелки, которая содержит в центре сферическую обойму, взаимодействующую с шарообразной цапфой, которая закреплена на конце цилиндрического наконечника, который полым концом взаимодействует с направляющим штифтом, закрепленным на крышке головки, а нижним концом жестко соединен со штангой центробежного регулятора, которая установлена внутри ведомого вала и содержит муфту с кольцевой проточкой, закрепленной в средней части штанги.
Ведомый вал несущего винта закреплен в корпусе вертолета посредством двух радиально-упорных подшипников, разделенных между собой распорной втулкой, жестко соединенной с ведомым залом, внутренний конец которого содержит зубчатое колесо, находящееся в постоянном зацеплении с зубчатым колесом вала редуктора.
Центробежный регулятор содержит два коромысла, установленные шарнирно в проушинах, выполненных с противоположных сторон на распорной втулке. На внешних концах коромысел закреплены грузики, а противоположные концы пропущены через окна, выполненные в стенках распорной втулки и ведомого вала, взаимодействуют с кольцевой проточкой муфты.
Электромагнитный автомат перекоса содержит на каждое направление движения вертолета отдельный электромагнит. Соосно ведомому валу на полу корпуса вертолета закреплен электромагнит, предназначенный для управления несущим винтом для вертикального взлета. Вокруг центрального электромагнита равномерно расположены по окружности несколько /шесть шт./ электромагнитов, предназначенных для осуществления продольного и поперечного управление вертолетом. Все электромагниты взаимодействуют в последовательном порядке с одним постоянным магнитом, закрепленным на конце водила, представляющим собой стержень, который жестко связан с центром тарелки автомата перекоса, которая установлена шарнирно на шаровом шарнире, шаровая цапфа которого закреплена на конце штифта, соосно установленного и жестко связанного с ведомым валом. На внешней окружности упомянутой тарелки выполнено несколько /соответственно числу двуплечих рычаге/ проушин в горизонтальной плоскости, которые соединены посредством шарниров с перекрещивающимся, осями с тягами, установленными внутри ведомого вала. Противоположные концы упомянутых тяг соединены посредством шарниров с проушинами втулок, установленными со свободным вращением на внутренних концах двуплечих рычагов. Противоположные проушины упомянутой втулки соединены посредством рычагов и шарниров с шарообразными цапфами, выполненными по окружности балансирующей тарелки, которая снабжена в центральной части сферической обоймой, взаимодействующей с шаровым шарниром, выполненном на направляющим штифте.
Комлевые обтекатели каждой лопасти снабжены триммерами, выполненными в виде узкой поперечной лопасти /пластины/.
Диаметральная линия, проходящая через центры электромагнитов 40, 39 и 43, должна точно совпадать с продольной осью вертолета и с пультом управления, согласно указанным направлениям.
На фиг.1 показан несущий винт с автоматом перекоса в разрезе.
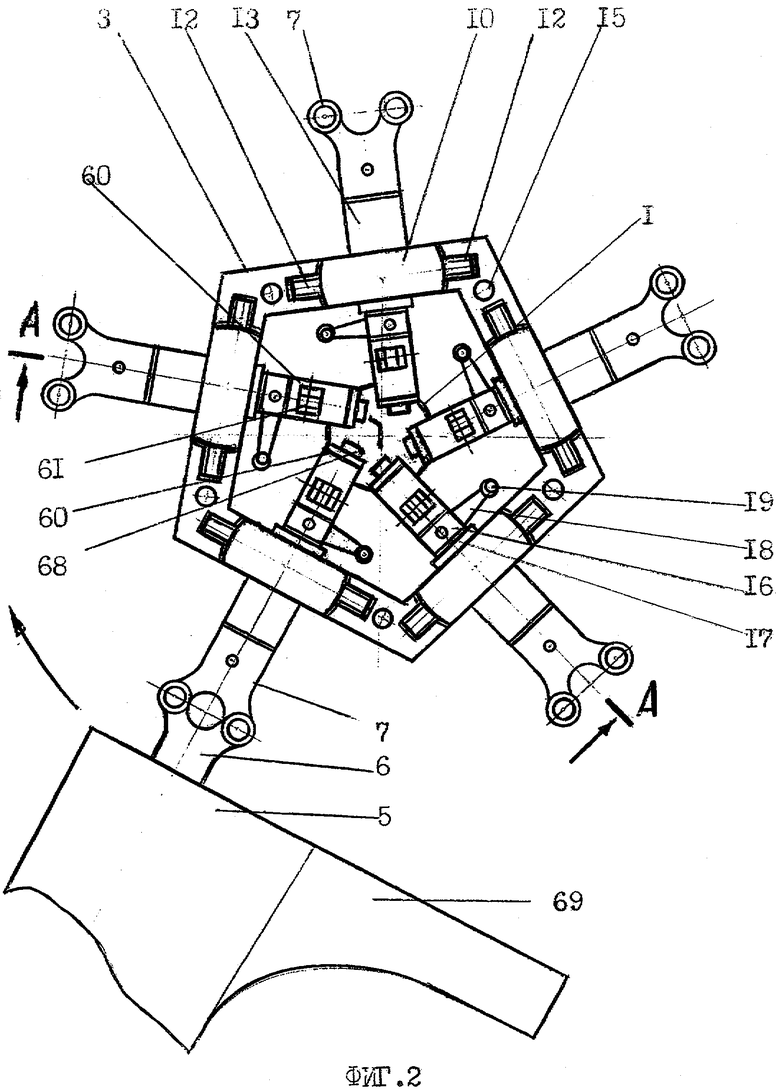
На фиг.2 показан несущий винт сверху со снятой крышкой готовки /качающая и балансирующая тарелки отсутствуют/.
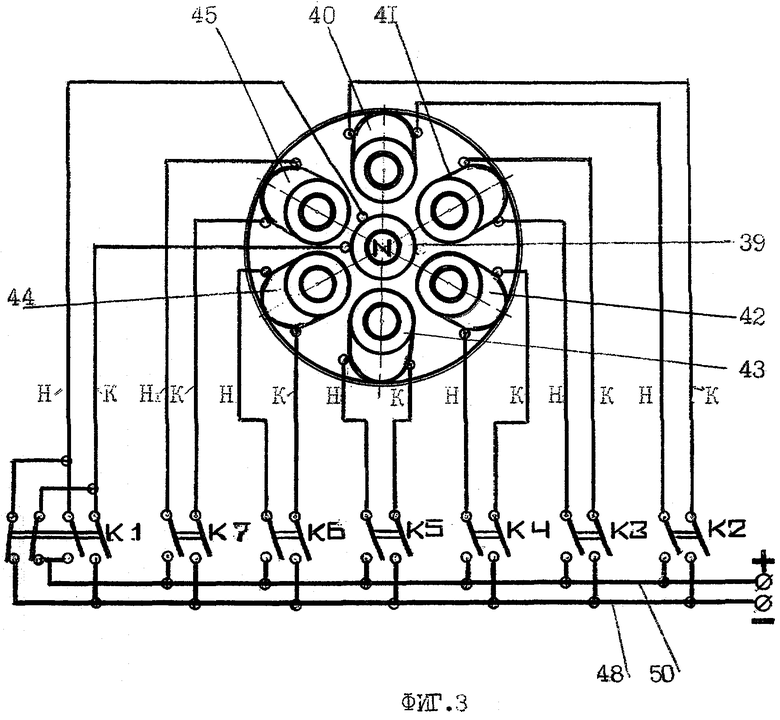
На фиг.3 показана электрическая схема автомата перекоса.
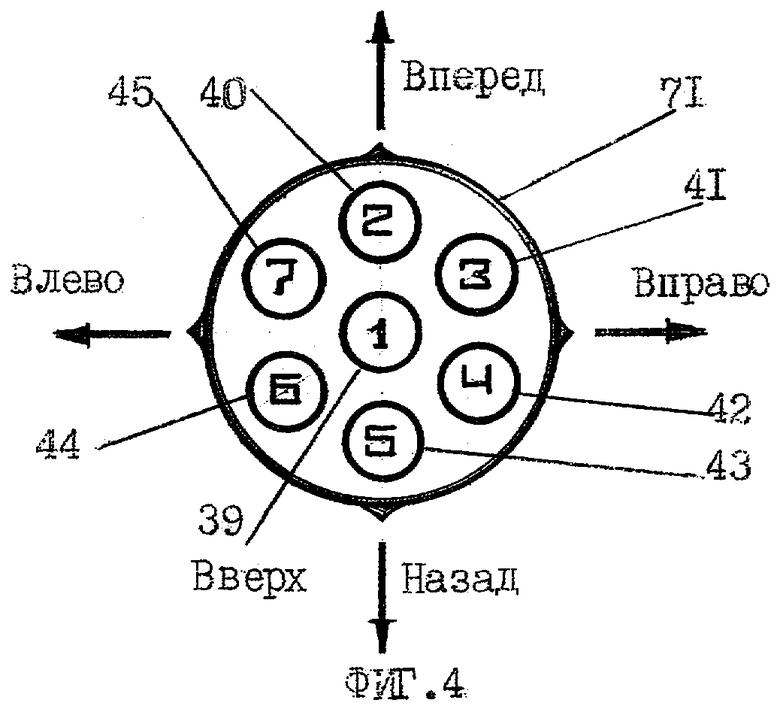
На фиг.4 показан кнопочный пульт управления автомата перекоса.
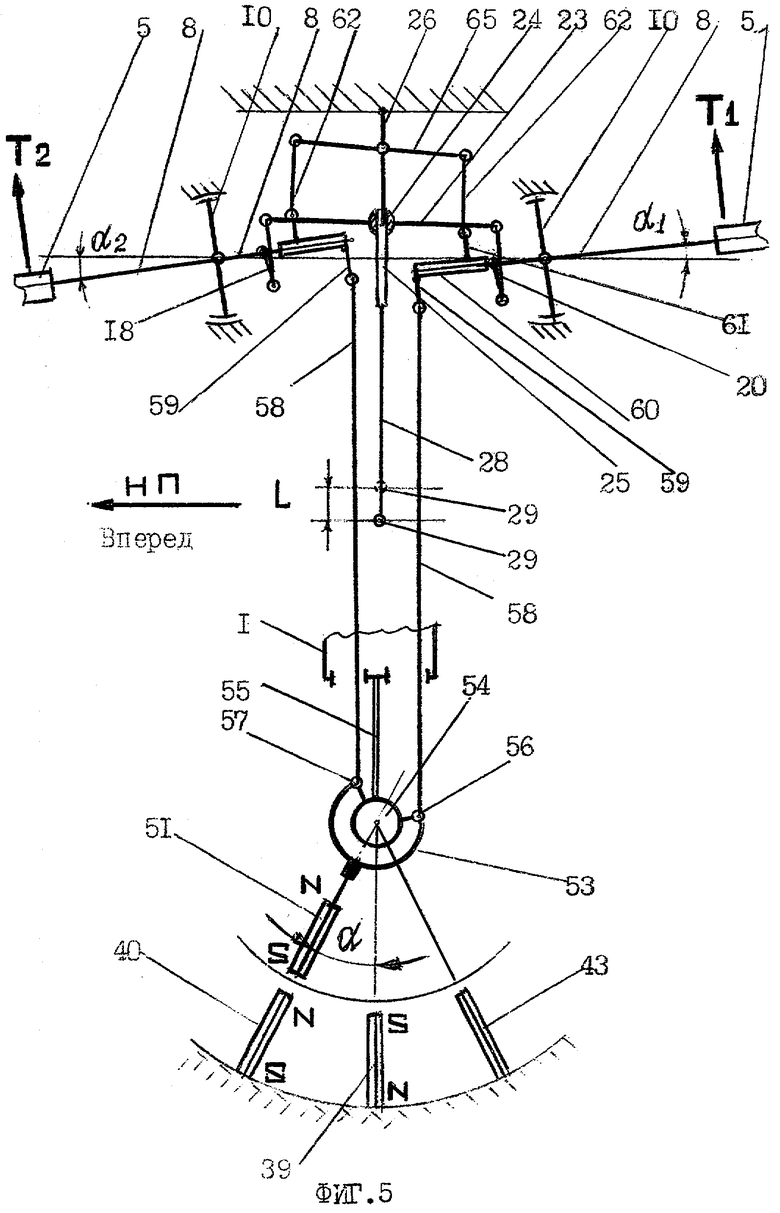
На фиг.5 показано схематически рабочее положение автомата перекоса и взаимодействие тяг, шарниров, тарелок и лопастей между собой.
Описание устройства несущего винта и автомата перекоса.
Несущий винт включает в себя пустотелый ведомый вал 1 с фланцем 2, посредством которого вал крепится к корпусу готовки 3 с крышкой 4. Корпус головки выполнен в виде пятигранника, к каждой стенке которого крепятся лопасти 5 посредством двуплечих рычагов, снабженных горизонтальным и осевым шарнирами. Лопасти 5 жестко соединены своими наконечниками 6 с наконечниками 7 двуплечих рычагов 8, посредством штифтов 9. Горизонтальным шарниром двуплечего рычага служит корпус 10 подшипника 11. Корпус снабжен с боковых противолежащих сторон пальцами 12, расположенными в горизонтальной плоскости и шарнирно установленными в гнездах /в подшипниках/, выполненных в стенках разъемного пятигранного корпуса. С целью повышения герметичности полости корпуса головки поверхности корпусов подшипников выполнены овальной формы и также сопрягающиеся поверхности стенок корпуса головки - с соответствующим овалом. Корпус подшипника 10 снабжен втулкой 13, играющей роль направляющей ступицы, через которую проходит двуплечий рычаг 8 цилиндрической формы с выполненным в средней части выступом 14, кольцеобразной формы. Двуплечий рычаг удерживается от продольных перемещений наконечником 7 и кольцеобразным выступом 14, в который упирается нижняя обойма подшипника 11, наружная обойма радиально-упорного подшипника 11 закреплена в корпусе 10. Радиально-упорный подшипник 11 обеспечивает двуплечему рычагу осевое вращение, допускающееся в пределах установки угла поворота лопастей. Крышка 4 плотно стягивается с корпусом 3 болтами /гнезда 15/.
На внутреннем конце двуплечего рычага закреплена втулка 16 /фиг.2/ штифтом 17, содержащая поводок 18 управления углом поворота двуплечего рычага 8 и вместе с ним, лопастей 5. Поводок 18 соединяется посредством шарового шарнира 19 с рычагом 20, который посредством другого шарового шарнира 21 и 22, выполненного на окружности тарелки 23, которая является балансирной тарелкой, соединятся шаровым шарниром с указанной тарелкой 23. Балансирная тарелка снабжена в центральной части сферической обоймой, которая шарнирно соединяется с шаровые шарниром 24, жестко закрепленным на конце полого наконечника 25, который своей полостью взаимодействует с направляющим штифтом 26, закрепленным пикой 27 на крышке головки 4. Противоположный конец наконечника 25 жестко соединен со штангой 28 центробежного регулятора, установленной внутри ведомого зала. На штанге закреплена муфта 29 с кольцевой проточкой, выполненной на внешней поверхности. Центробежный регулятор содержит два коромысла, симметрично расположенных по обе стороны ведомого вала. Наружные концы коромысел 30 снабжены грузиками 31 и 32. Двуплечие рычаги коромысел шарнирно закреплены в проушинах 33, выполненных на наружных стенках распорной втулки 34, жестко соединенной с ведомым валом. Противоположные концы обоих двуплечих коромысел пропущены через окна 35, выполненные в стенках распорной втулки и стенках ведомого вала и взаимодействуют с кольцевой проточкой муфты 29.
Ведомый вал закреплен в корпусе вертолета посредством двух радиально-упорных подшипников 36 и 37, разделенных между собой распорной втулкой 34. На внутреннем конце ведомого вала 1 установлено зубчатое колесо 38, которое находится в постоянном зацеплении с зубчатым колесом вала редуктора /не показано/.
Электромагнитный автомат перекоса содержит на каждое направление движения вертолета отдельный электромагнит /фиг.1 и 3/ 39, 40, 41, 42, 43, 44, 45. Соосно ведомому валу 1 расположен электромагнит 39, предназначенный для управления несущим винтом при взлете вертолета в вертикальном направлении. Вокруг центрального электромагнита 39 расположены равномерно по окружности шесть других электромагнитов. Электромагнит 40 предназначен для управления вертолетом при поступательном движении "Вперед". Электромагниты 41 и 42 предназначены для управления вертолетом при поворотах "Вправо". Электромагнит 43 предназначен для управления вертолетом в обратном направлении "Назад". Электромагниты 44 и 45 предназначены для управления вертолетом при поворотах "Влево".
Все электромагниты жестко крепятся болтами 46 к полу 47 сердечниками 48. Выводы электромагнитов, конец /К/ и начало /Н/ выведены к пульту управления /фиг.4/ и подключены к кнопочным выключателям.
Кнопка 1 соответствует выключателю К1.
Кнопка 2 соответствует выключателю К2.
Кнопка 3 соответствует выключателю К3.
Кнопка 4 соответствует выключателю К4.
Кнопка 5 соответствует выключателю К5.
Кнопка 6 соответствует выключателю К6.
Кнопка 7 соответствует выключателю К7.
Все указанные выключатели имеют возможность подключаться к общим шинам 49 и 50, которые имеют возможность отключаться общим отключателем /не показано/. Выключатель К1 имеет две пары контактов на одной кнопке 1. Одна пара контактов находится постоянно замкнута, а другая пара - постоянно разомкнута. При нажатии кнопки 1 происходит подключение шин с обратным направлением токов и в этом случае происходит смена полярности у центрального электромагнита 39. Все электромагниты взаимодействуют с постоянным магнитом 51, закрепленным на конце водила 52, представляющего собой стержень, жестко связанный с центром тарелки 53 автомата перекоса. Центр тарелки снабжен сферической обоймой, которая взаимодействует с шарообразной цапфой 54, закрепленной на конце штифта 55, соосно установленным и жестко соединенным с ведомым валом. Штифт имеет направляющую полость, куда входит конец штанги 28. На внешней окружности тарелки перекоса выполнено пять проушин 56 /соответственно числу лопастей/, которые соединены посредством шарниров с перекрещивающимися осями с тягами 57 и 58, установленными внутри ведомого вала. Противоположные концы тяг 58 соединены посредством шарниров 59 с проушинами втулок 60, установленными со свободным вращением на внутренних концах двуплечих рычагов 8. Противоположные проушины данной втулки соединены посредством шарниров 61 и рычагов 62 с обоймами 63, с шарообразными цапфами 64, выполненными по окружности балансирной тарелки 65, которая снабжена сферической обоймой 66 в центре и взаимодействует с шаровым шарниром 67, выполненным на направляющим штифте 26. Втулки 60 удерживаются от продольных перемещений болтами 68 с шайбами, ввернутыми в торцы двухплечих рычагов.
Лопасти снабжены триммерами, выполненными в виде узкой пластины 69, расположенной поперек лопастей и закрепленной на комлевых обтекателях /фиг.2/. 70 - обозначен корпус вертолета. Ось лопастей и двухплечих рычагов не совпадает с осью ведомого вала, она проходит левее центра на некоторый угол /не установлено/, примерно на такой же угол отклоняется ось лопастей у современных вертолетов. Это необходимо для того, чтобы лопасти испытывали меньше кручение на изгиб при раскрутке несущего винта.
Конструкция лопастей остается прежней, без изменения, единственным отличием может быть только укорочение лопастей, так как тяга создается всеми лопастями несущего винта и длинные лопасти не нужны.
Управление несущим винтом.
1. Подъем вертолета вверх.
Предположим, что несущий винт вращается с малыми оборотами. Грузики 31 и 32 центробежного регулятора будут занимать нижнее положение, как показано на фиг.1. Штанга 28 с муфтой 29 в этом случае займет верхнее положение. Наконечник 25 с шаровым шарниров 24 будет удерживать в этом положении балансирную тарелку 23, которая через шарнирные соединения 22 и 21, рычаги 20 и поводки 18 установит угол поворота у всех двуплечих рычагов с лопастями минимальный. Производить, поворачивать, установку лопастей с минимальным углом будут также триммеры 69, так как плоскости триммеров будут стремиться занимать положение параллельно плоскости вращения под действием давления встречного ветра.
Для вертикального взлета вертолета нажимается кнопка 1 на пульте 71 /фиг.4/, при этом контакты К1 переместятся в левую сторону и замкнутся с шинами 49 и 50. Левая пара контактов К1 и все другие контакты /К2÷К7/ отключатся блокировкой /не показано/. При замыкании правой пары контактов К1 с шинами 49 и 50 ток положительной полярности /+/ будет поступать на вход /Н/ катушки электромагнита 39, у которой возникнет магнитное поле по направлению от постоянного магнита 51 в сторону пола /фиг.1/, т.е. электромагнит окажется северным полюсом /N/, расположенным к постоянному магниту 51, который притянется электромагнитом и будет удерживаться в этом положении сколько угодно долго. При соосном положении постоянного магнита и электромагнита тарелка автомата перекоса 53 будет располагаться в горизонтальной плоскости, при этом все шарниры 56 и 57 тарелки будут находиться на одном уровне /как показано на фиг.1/, так как все тяги 58 равны между собой, то двуплечие рычаги и оси тарелки 23 и 65 установятся в горизонтальное положение. Плоскость диска окружности у лопастей будет удерживаться в горизонтальном положении.
Затем несущий винт начинает раскручиваться до максимальных оборотов, грузики 31 и 32 сносятся центробежной силой в верхнее положение на некоторый угол альфа /α/, при этом муфта 29 переместится вниз на расстояние /L/ фиг.5, которая в свою очередь передвинет посредством штанги 28 и наконечника 25 шаровой шарнир 24 вместе с балансирной тарелкой 23 также вниз. Тарелка 23 надавит равномерно через рычаги 20 на поводки 18, которые повернут двухплечие рычаги с лопастями на максимальный угол поворота с общим шагом.
Вертолет взлетит вверх.
Поступательное движения вертолета.
После того как вертолет поднимется в воздух, нажимается кнопка 2 /фиг.4 и 5/, при этом все другие кнопки отключаются блокировкой, а выключатель К1 переключается на другую пару контактов. В этом случае ток будет подаваться на электромагнит 39 в обратное направлении. Электромагнит перемагнитится и его полярность изменится на обратную. Верхний конец электромагнита будет иметь южный полюс /S/. Так как одноименные полюса отталкиваются друг от друга, то постоянный магнит 51 будет вытолкнут магнитным полем из центра и притянется электромагнитом 40, так как данный электромагнит будет иметь на верху северный полюс /N/, выключатель К2 подал на вход /Н/ электромагнита ток со знаком плюс /+/. Постоянный магнит 51 отклонится от соосной линии на угол альфа /фиг.5/, вместе с ним будет удерживаться под таким же углом тарелка 53 автомата перекоса. Водило с магнитом 51 при вращении ведомого вала 1 быстро будет прокручиваться по кругу и притягиваться тем или другим электромагнитом, так как лопасти имеют постоянно максимальный угол поворота, то провал с вертолета в период перехода водила создаваться не будет. При вращении ведомого вала 1 заодно с ним будет вращаться тарелка 53, непрерывно поворачиваясь вокруг шарового шарнира 54 /Вместо шарового шарнира можно использовать известный карданный шарнир, который является более надежным/, удерживая прекос с одним и тем же углом относительно оси ведомого вала. Плоскость шарниров 56 и 57 будет иметь перекос, этот перекос будет передаваться через тяги 58, проушины 59, втулки 60 на внутренние концы двуплечих рычагов 8. При этом лопасти 5 с правой стороны будут подниматься вверх на угол альфа 1 /α1/, а лопасти с левой стороны, наоборот, будут опускаться вниз на угол альфа 2 /α2/. Тяга Т1 и Т2 будут создаваться всеми лопастями в одном направлении и под одним углом перекоса относительно вертикальной оси ведомого вала.
Увеличить наклон диска несущего винта можно за счет укорачивания внутренних плеч двухплечих рычагов 8.
Качающая тарелка 65 предназначена глазным образом для того, чтобы освободить шарниры и тяги 58 от динамических нагрузок, возникающих при порывах ветра, а также возникающих при встречном вращении лопастей движению вертолета и воспринять удары на себя и обеспечивать нивелирование между лопастями.
Точно таким же образом работает балансирная тарелка 23, если угол поворота у лопасти, например, с правой стороны по каким-либо причинам увеличился, то это движение будет передано через балансирную тарелку на лопасти с левой стороны, но с отрицательным знаком, лопасти уменьшат угол поворота, в результате этого уменьшится тяга у этих лопастей, общая сумма тяги сохранится без изменения.
Так как аэродинамические силы зависят от скорости, то по диску несущего винта будет иметь место различие в подъемных силах на лопастях в соответствии с их азимутальным положением. Лопасти движущиеся навстречу движения вертолета будут иметь при одинаковых углах поворота наибольшую подъемную силу, что приводит на практике к завалу вертолета. Во избежании такого эффекта предлагается использовать триммеры увеличенных размеров, которые необходимо устанавливать ближе к несущему валу, так как лопасти совершают вертикальные колебания, то в этих случаях триммеры, находясь закрепленными на комлевом обтекателе, будут испытывать более слабые колебания и более точно будут выполнить свои функции.
При встречном движении триммеры будут взаимодействовать с ветром и будут стремиться повернуть попасть в обратном направлении, уменьшая ей угол поворота. Это поворотное движение будет передаваться через балансирную тарелку противоположным лопастям, у которых будет происходить увеличение угла поворота, т.к. усилия триммера находящихся на встречном потоке будут значительно больше тех усилий, которые будут создавать снасти, находящиеся на попутном потоке. Нивелирование будет происходить за счет того, что доводки лопастей соединены между собой через балансирную тарелку 23 и балансирные движения тарелки никоим образом не влияют на общий угол поворота у лопастей и не мешают работе центробежному регулятору, т.к. колебательные движения тарелки происходят через независимый шаровой шарнир 24, который не может оказывать давление на штангу 28 регулятора, грузики которого будут оказывать противодействие.
3. Движение вертолета назад /фиг.1 и 5/.
При необходимом выборе движения назад вертолета нажимается кнопка 5 на пульте управления 71 /Фиг.4/. При этом выключатель К5 подключает шины 49 и 50 к электромагниту 43, остальные все, кроме центрального электромагнита 39, отключаются блокировкой. Центральный электромагнит в полете постоянно находится одноименным полюсом к постоянному магниту 51, поэтому постоянный магнит будет всякий раз выталкиваться из центра и вращением ведомого вала водило с постоянным магнитом будет перебрасываться к тому электромагниту, который будет подключен к сети.
В данном случае электромагнит 43 своим магнитном полем притянет магнит 51 и будет удерживаться 8 этом положении сколько угодно долго. Тарелка 53 создаст перекос между шарнирами 56 и 57 в противоположном направлении первому варианту /вперед/. Тяги 58 произведут перекос двуплечих рычагов с лопастями и перекосы у тарелок 23 и 65 в обратную сторону. При этом правые лопасти опустятся вниз, а левые допасти, наоборот, поднимутся вверх на угол альфа /α/. Тяга от лопастей также изменит свое направление и будет обращена назад. Все процессы, связанные с тарелками, будут в точности повторяться, как рассматривались в первом варианте, "Вперед".
4. Движение вертолета в левую сторону.
При выборе движения вертолетом в левую сторону нажимается кнопка 6 или кнопка 7 на пульте 71 /фиг.3, 4/, в зависимости от того, как быстро необходимо повернуть в левую сторону от поступательного прямолинейного движения. При нажатии кнопки 7 соединяются контакты К7 с шинами 49 и 50, ток подается на катушку электромагнита 45, все остальные контакты выключателей выключаются блокировкой, кроме электромагнита 39. Магнит 51 с водилом отпускаются прежним электромагнитом и водило вращается по кругу до того положения, когда магнитное поле электромагнита 45 притянет его и будет удерживать водило с магнитом точно под таким же углом альфа, как и в первых случаях. Будет создан перекос тарелкой 53, этот перекос будет передан через тяги 58 двуплечим рычагам 8 и обоим исполнительным тарелкам 23 и 65. Лопасти с правой стороны, относительно продольной оси вертолета, будут подниматься вверх, а лопасти с левой стороны продольной оси будут опускаться вниз. Тяга несущего винта примет направление с наклоном в левую сторону.
5. Движение вертолета в правую сторону.
При выборе вертолетом движения в правую сторону нажимается кнопка 3 или кнопка 4. При нажатии кнопки 3 подключаются контакты К3 к шинам 49 и 50, остальные контакты отключаются блокировкой, кроме контактов К1. Магнит с водилом отпускаются прежним электромагнитом и притягивается электромагнитом 41, при этом происходит перекос тарелки 53, которая задает перекос через тяги 58 исполнительным тарелкам 23 и 65 и перекос двуплечим рычагам с лопастями. Лопасти с левой стороны относительно продольной оси вертолета поднимутся вверх, а лопасти с правой стороны, относительно продольной оси вертолета, опустятся вниз. Тяга несущего винта примет направление с наклоном в правую сторону.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2415780C1 |
| ДВИЖИТЕЛЬ | 2005 |
|
RU2305648C2 |
| ДВИЖИТЕЛЬ | 2001 |
|
RU2232696C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЭЛЕКТРОПРИВОДОМ | 2003 |
|
RU2266236C2 |
| АВТОМАТ ПЕРЕКОСА | 2009 |
|
RU2402457C1 |
| АВТОМАТ ПЕРЕКОСА | 2016 |
|
RU2656737C1 |
| ВИНТОВОЙ ГИДРОДВИГАТЕЛЬ | 2011 |
|
RU2500919C2 |
| ПОРОШКОВАЯ МУФТА СЦЕПЛЕНИЯ С ПРИВОДОМ УПРАВЛЕНИЯ | 2012 |
|
RU2499923C1 |
| Соосный несущий винт винтокрылого летательного аппарата | 2021 |
|
RU2756861C1 |
| АВТОМАТ ПЕРЕКОСА НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 1994 |
|
RU2088479C1 |
Изобретение относится к устройству несущих винтов и средствам управления ими. В несущем винте лопасти крепятся к наконечникам, закрепленным на наружных концах двуплечих рычагов, которые снабжены осевым и горизонтальным шарнирами. В качестве осевых шарниров служат радиально - упорные подшипники, внутренней обоймой которые упираются в кольцеобразный выступ, выполненный в средней части двуплечего рычага, а наружной обоймой закрепляется в корпусе подшипников, который является горизонтальным шарниром, снабженный пальцами с противоположных сторон и расположенный в горизонтальной плоскости, и взаимодействуют с подшипниками, закрепленными в стенках пятигранного корпуса готовки, жестко закрепленного к ведомому валу посредством фланца, выполненного на этом валу. Автомат перекоса выполнен на принципе взаимодействия магнитных полей электромагнитов с магнитом, закрепленным на водиле, жестко связанным с тарелкой автомата перекоса, которая шарнирно установлена на шаровом шарнире, закрепленном на стержне, соосно выполненным и жестко связанным с ведомым валом. По краям тарелки выполнено пять проушин, которые соединены посредством шарниров с перекрещивающимися осями с тягами, установленными внутри ведомого вала. Автомат перекоса включает в себя семь электромагнитов, закрепленных на полу корпуса вертолета. Центральный электромагнит установлен соосно ведомому валу, а шесть других расположены равномерно по окружности вокруг центрального электромагнита. Выводы каждого электромагнита соединены с выключателями, установленными в такой же последовательности, как расположены электромагниты, и расположены в кнопочном пульте управления, причем плоскость, проходящая через центры переднего и заднего направлений, устанавливается строго вдоль продольной оси вертолета, для того чтобы вертолет сохранял прямолинейное движение при полете в прямом направлении. Контакты выключателей подключаются посредством кнопок к шинам источника постоянного тока. Техническим результатом изобретения является упрощение конструкции и повышение тяги несущего винта. 1 з.п. ф-лы, 5 ил.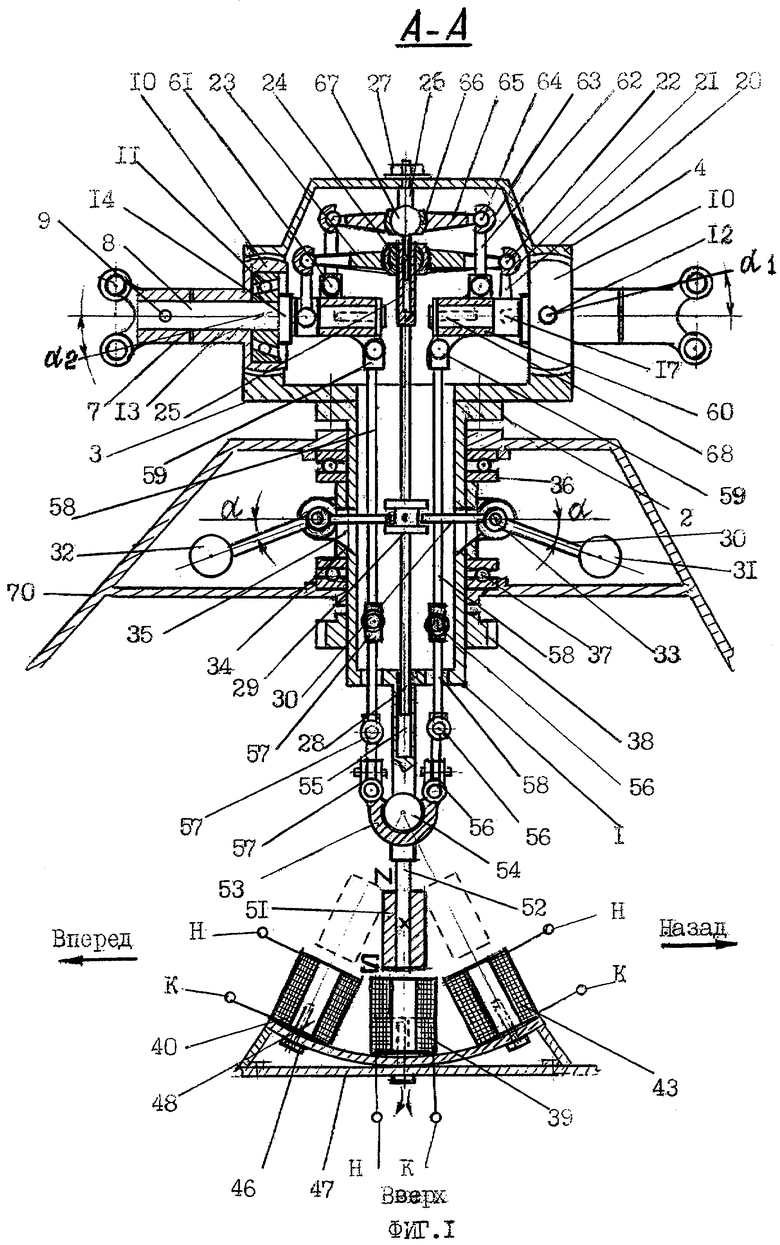
| ДАНИЛОВ В.А., Вертолет Ми-8, Устройство и техническое обслуживание, М., «Транспорт», 1988 | |||
| ЛОПАСТНОЙ ПОДУЗЕЛ НЕСУЩЕГО ВИНТА БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2125952C1 |
| US 6050778 А, 18.04.2004. | |||

