Фигл
10, а другой Д 6 - дополнительно с запирагаищм входом ячейки 10. Выполнены ИЭ -4 и 5 в виде смонтированных а одной оси барабанов с ведомыми рычагами, установленными с возможностью взаимодействия с ведущими рычагами, которые размещены яа валу механизма управления НЭ 4 и 5. При удлинении ТП 2 сигнал с Д 6 |1одается на один из входов блока, КОТОРЫЙ воздействует на механизм 9, ведущий рычаг механизма 9 воздействует на ведомый рычаг ТП 2 и
поворачивает барабан в сторону натяжения ТП 2 до момента прекращения поступления сигнала с Д 6. При одновременном удлинении ТП 2 и 3 на оба входа ячейки 10 подаются сиг калы с обоих Д 6 и 7. Яч-ейка 10 запрещает прохождение сигнала с Д 7, а с Д 6 сигнал проходит на блок 8 и ТП 2 регулируется в первую очередь После этого запрещающий сигнал снимается с ячейки 10 и регулируется ТП 3. 1 з.п. ф-лы, 2 ил.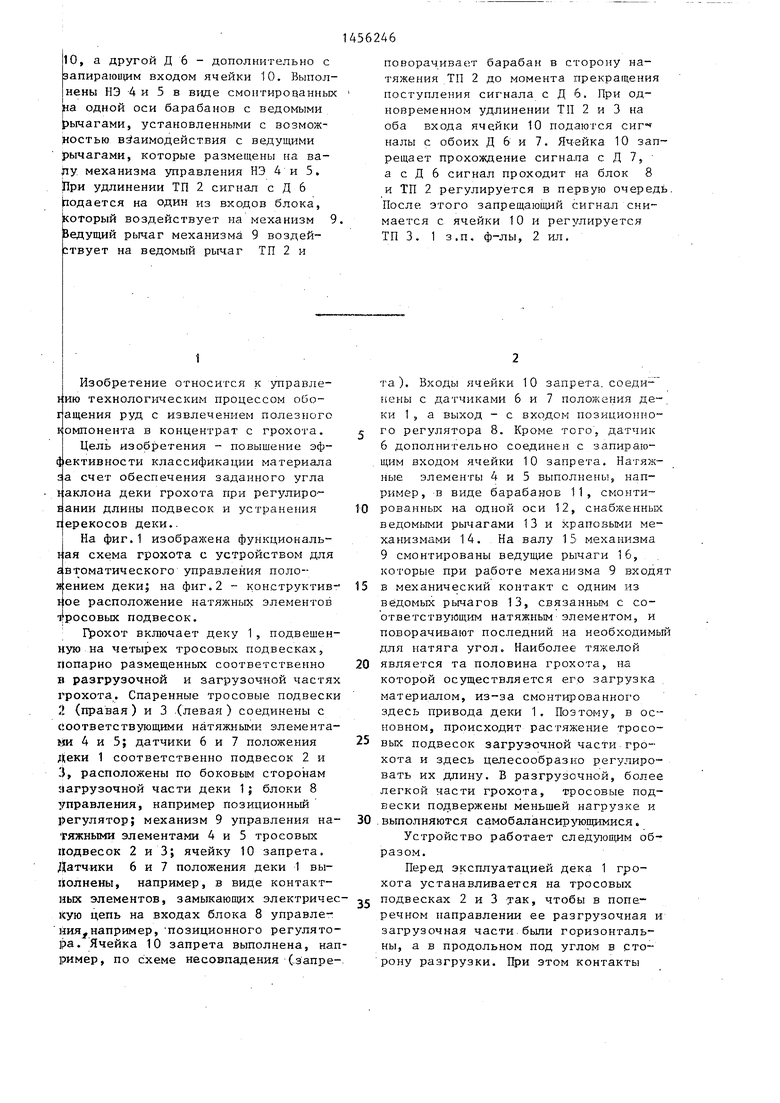

| название | год | авторы | номер документа |
|---|---|---|---|
| Грохот | 1990 |
|
SU1750739A1 |
| Устройство для автоматического контроля работы грохота | 1989 |
|
SU1701399A1 |
| Способ управления процессом извлечения асбестовых концентратов на пневматической установке с воздухоприемником грохота | 1984 |
|
SU1199305A1 |
| Способ управления процессом грохочения и вибрационный грохот | 1987 |
|
SU1419756A1 |
| СПОСОБ УПРАВЛЕНИЯ И ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2021654C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765390C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765389C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765316C1 |
| ГРОХОТ ИНЕРЦИОННЫЙ | 2008 |
|
RU2383397C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765583C1 |
I
1Изобретение относится к управлению технолог}гческим процессом обогащения руд с извлечением полезного компонента в концентрат с грохота.
Цель изобретения - повышение эффективности классификации материала sa счет обеспечения заданного угла наклона деки грохота при регулировании длины подвесок и устранения Еерекосов деки..
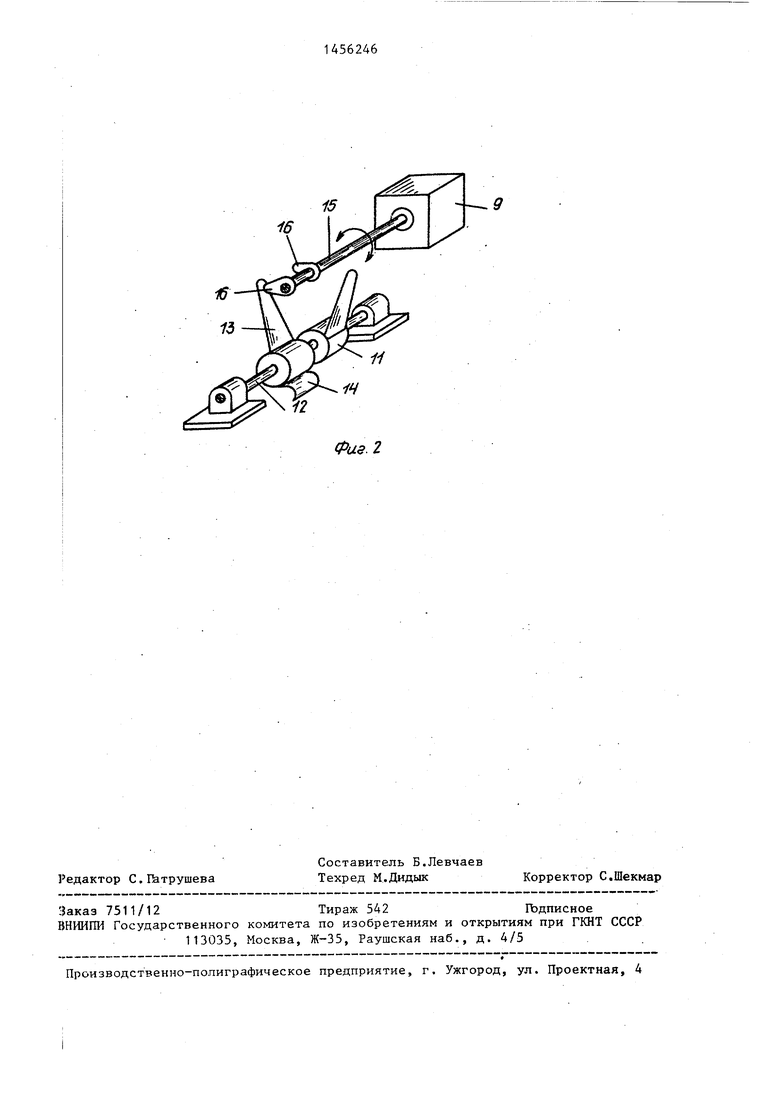
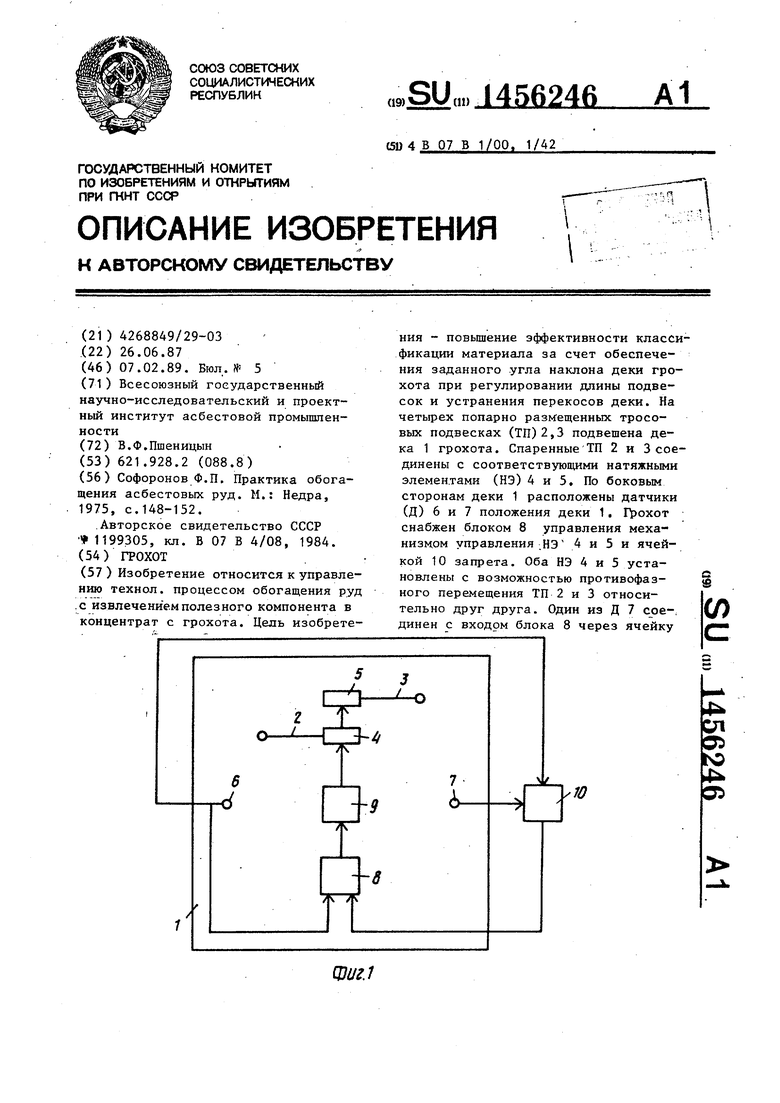
На фиг.1 изображена функциональ- taH схема грохота с устройством д.ля автоматического управления поло- я:ением деки; на фиг. 2 - конструктив- 1-:ое расположение натяжных элементов ч росовых подвесок.
Прохот включает деку 1, подвешенную на четырех тросовых подвесках, попарно размещенных соответственно в разгрузочной и загрузочной частях грохота. Спаренные тросовые подвески
2(правая ) и 3 .(левая ) соединены с соответствующими натяжными элемента- 1Ш 4 и 5; датчики 6 и 7 положения Деки 1 соответственно подвесок 2 и 3, расположены по боковьм сторонам :1агрузочной части деки 1; блоки 8 управления, например позиционный регулятор; механизм 9 управления натяжными элементами 4 и 5 тросовых подвесок 2 и 3; ячейку 10 запрета, Датчики 6 и 7 положения деки 1 вы- «олнены, например, в виде контактных элементов, замыкающих электрическую цепь на входах блока 8 управле йия,например, позиционного регулятора. Ячейка 10 запрета выполнена, например, по схеме несовпадения (.запрета). Входы ячейки 10 запрета, соединены с датчиками 6 и 7 положения де-. ки 1, а выход - с входом позиционного регулятора 8. Кроме того, датчик 6 дополнительно соединен с запирающим входом ячейки 10 запрета. Натяжные элементы 4 и 5 выполнены, например, в виде барабанов 11, смонтированньк на одной оси 12, снабженных ведомыми рычагами 13 и храповыми механизмами 14. На валу 15 механизма 9 смонтированы ведущие рычаги 16, которые при работе механизма 9 входят
в механический контакт с одним из ведомых рычагов 13, связанным с соответствующим натяжным элементом, и поворачивают последний на необходимьй для натяга угол. Наиболее тяжелой
является та половина грохота, на которой осуществляется его загрузка материалом, из-за смонтированного здесь привода деки 1 . Поэтому, в основном, происходит растяжение тросовых подвесок загрузочной части грохота и здесь целесообразно регулировать их длину. В разгрузочной, более легкой части грохота, тросовые подвески подвержены меньшей нагрузке и
.выполняются самобалансирующимися.
Устройство работает следующим об разом.
Перед эксплуатацией дека 1 грохота устанавливается на тросовых
подвесках 2 и 3 так, чтобы в поперечном направлении ее разгрузочная и загрузочная части были горизонтальны, а в продольном под углом в сторону разгрузки. При этом контакты
датчиков 6 и 7 положения деки 1 разомкнуты, например, на 3-5 мм. Натяжные элементы 4 и 5 установлены в начальное положение (фиг.2). Ведомые рычаги 13 натяжных элементов 4 и 5 находятся почти в вертикальном положении и между ними расположен ведущий рычаг 16 исполнительного механизма 9.
В процессе грохочения материала тросовые подвески 2 и 3 вытягиваютс неравномерно. При удлинении в разгрузочной части деки 1, например правой по ходу грохотимого материала тросовой подвески 2, контакт датчика 6 положения деки 1 состояния тросовой подвески 2 замыкается. Сигнал с датчика 6 подается на один из входов позиционного регулятора 8 В регуляторе 8 срабатывает соответствующий позиционный элемент, через который подается напряжение определенной фазы на вход механизма 9. При этом ведущий рычаг 15 вала механизма 9 воздействует на ведомый ры- чаг 13 удлиненной тросовой подвески 2 и поворачивает барабан 11 на оси 12 в сторону натяжения тросовой подвески 2 до момента прекращения поступления сигнала с датчика 6, контак которого при этом размыкается. После прекращения поступления сигнала с датчика 6 состояния правой по ходу грохотимого материала тросовой подвески 2 позиционный регулятор 8 обесточивает механизм 9. Механизм управления прекращает вращение натяжного элемента 4 и последний стопорится храповым механизмом 14.
При удлинении,например,левой по х:оду грохотимого материала тросовой подвески 3, замыкается контакт датчика 7 состояния данной подвески. Сигнал с датчика 7 левосторонней тросовой подвески 3 на позицйонньм регулятор 8 поступает через ячейку 10 запрета. Ячейка 10 запрета открыта для сигнала при отсутствии на ее входе сигнала от противоположного в паре датчика 6, поэтому сигнал от левого по ходу грохотимого материала датчика 7 проходит на позиционный регулятор 8 и с обратной фазой подается напряжение на механизм 9 управления, который воздействует на ведомый рычаг 13 левой тросовой подвески 3 до момента прекращения пос .
456246
тупления
сигнала с соответствующего датчика 7 до восстановления длины подвески.
одновременном удлинении в паре обеих тросовых подвесок 2 и 3 на оба входа ячейки 10 запре га подаются сигналы с обоих датчиков 6 и 7. Ячейка 10 запрета запрещает прохож1Q дение сигнала с левого по.ходу грохотимого материала датчика 7 на позиционный регулятор 8, в то время как сигнал с датчика 6 проходит на регулятор 8 и данная тросовая подвес15 ка регулируется (натягивается) в первую очередь. После этого запрещающий сигнал снимается с ячейки 10 запрета и в действие вступает натяжной элемент 5 левой по ходу грохотимого материала тросовой подвески 3.
20
5
0
5
0
5
0
5
Формула изобретения
2, Грохот поп.1,отличаю- щ и и с я тем, что он снабжен ведущими рычагами, установленными на валу механизма управления натяжными элементами, а натяжные элементы вьшолне- ны в виде смонтированных на одной оси барабанов с ведомыми рычагами, установленными с возможностью взаимодействия с ведущими рычагами механизма управления.
15
16
Фаз. 2
| Софоронов Ф.П, Практика обогащения асбестовых руд | |||
| М.: Недра, 1975, с.148-152 | |||
| Способ управления процессом извлечения асбестовых концентратов на пневматической установке с воздухоприемником грохота | 1984 |
|
SU1199305A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
