Изобретение относится к области управления технологическим процессом обогащения асбестовых руд, а именно к управлению процессом извлечения асбестовых концентратов из дробленой асбестовой руды воздухоприемником с грохота.
Цель изобретения - повышение оперативности управления процессом извлечения. . Способ включает следующие операции:
измерение разности разрежения в двух точках воздухоприемника по его боковым стор,онам;
сравнение полученного сигнала со значением, соответствующим заданному распределению материала по ширине деки срохота;
регулирование распределения материала по ширине деки грохота при отклонении разности разрежений от значения, соответствующего заданному распределению материала, путем изменения положения деки грохота.
На чертеже изображено устройство, реализующее способ управления процессом извлечения асбестовых койцентратов, общий вид.
Устройство содержит грохот 1, подвещенн.ый на тросовых нерегулируемых подвесках 2 и регулируемой подвеске 3, воздухоприемник 4, снабженный схемой управления, включающей дифференциальный тягомер 5 (например, типа ДТ-2), соединенный импульсными трубками 6 и 7 с узлами отбора пневматических импульсов 8 и 9 (соответствующих разрежению в точках отбора), выполненных в виде трубок со щтуцерами и установленных в двух точках воздухоприемника по его боковым сторонам, электронный регулятор 10 (например, типа РП-2)с задатчиком 11 распределения слоя материала, исполнительный механизм 12, на валу которого закреплен барабан 13, служащий для намотки тросовой подвески 3.
Способ осуществляЕот следующим образом.
Перед эксплуатацией схема управления настраивается на оптимальный режим извлечения асбестового концентрата из дробленой руды. Для этого измеряют разрежение в узлах отбора пневматических импульсов 8 и 9, размещенных в двух точках воздухоприемника по его боковым сторонам. Устанавливают величину сигнала задатчика 11 распределения слоя материала, равную величине сигнала дифференциального тягомера 5, соответствующей разности разрежения в узлах отбора пневматических импульсов 8 и 9 при оптимальном распределении надрешетного материала по ширине грохота. Схема управления готова к работе.
В процессе грохочения материала при образовании разновысртного (5 мм и более).
слоя материала по Ц1ирине грохота pa3pej жение в узлах отбора пневматических им-. пульсов 8 и 9, размещенных в двух точках воздухоприемника 4 по его боковым сТоро- нам, будет различным. Пневматический сигнал от узлов отбора импульсов 8 и 9 подается по импульсным трубкам 6 и 7 на дифференциальный тягомер 5. С дифференциального тягомера 5 снимается электрический сигнал, соответствующий разности
0 разрежений в узлах отбора пневматических импульсов 8 и 9 и имеющий, определенную полярность. Полярность сигнала дифференциального тягомера 5, зависит от направления наклона слоя материала на деке грохота. При правостороннем (по отношению
к регулируемой подвеске 3) наклоне слоя надрешетного материала с дифференциального тягомера снимается сигнал «положительной полярности и подается на вход электронного регулятора 10, где сравнивается с величиной задатчика 1 1 распределения слоя материала. На выходе электронного регулятора 10 появляется сигнал, полярность которого соответствует полярности сигнала дифференциального тягомера 5 (в данном случае -положи5 тельный). С выхода электронного регулятора 10 сигнал «положительной полярности подается на вход исполнительного механизма 12, который с помощью барабана 13 и регулируемой подвески 3 изменяет положение деки грохота - поднимает ее на
высоту, соответствующую длительности выходного сигнала регулятора- 10, зависящую от времени прохождения материала от загрузочного устройства до воздухоприемника 4. При изменении положения деки грохота 1 диагональное перемещение частиц надрешетного материала меняется на продольное и слой выравнивается. Величина сигнала дифференциального тягомера 5 становится равной величине сигнаяа задатчика И, соответствующей равномерному распределению материала по ширине деки грохота. Процесс извлечения протекает в заданном оптимальном режиме.
При левостороннем (по отношению к рес гулируемой подвеске 3) наклоне слоя надрешетного материала с выхода дифференциального тягомера 5 снимается сигнал «отрицательной полярности и подается на вход электронного регулятора 10, где сравнивается с величиной сигнала задатчика Прас0 пределения слоя материала. С выхода электронного регулятора 10 сигнал «отрицательной полярности подается на вход исполнительного механизма 12, который с помощью барабана 13 и тросовой подвески 3 опускает деку грохота, слой надрещетного 5 материала выравнивается. Величина сигнала дифференциального тягомера 5 становится равной величине сигнала задатчика II,
соответствующей равномерному распреде-Использование предлагаемого изобрелеиию материала по ширине деки грохота.тения позволяет увеличить выход готовой
Процесс извлечения протекает в заданномпродукции более высокого качества, уменьоптимальном режиме.шить потери волокна в сходе.
1199305
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом извлечения полезного компонента в концентрат с грохота | 1987 |
|
SU1430119A1 |
| Устройство для грохочения асбестовых руд | 1989 |
|
SU1694242A1 |
| Воздухоприемник для отсасывания материала с грохота | 1989 |
|
SU1669592A1 |
| Способ управления процессом обработки сыпучих материалов на параллельно работающих аппаратах | 1978 |
|
SU753465A1 |
| ГРОХОТ ИНЕРЦИОННЫЙ | 2008 |
|
RU2383397C1 |
| Грохот | 1987 |
|
SU1456246A1 |
| Способ грохочения | 1990 |
|
SU1761304A1 |
| Способ управления процессом обогащения асбестовой руды | 1975 |
|
SU543406A1 |
| Устройство для автоматического управления процессом извлечения асбестовых концентратов | 1979 |
|
SU896360A1 |
| Многоярусный грохот с отсасывающими соплами для пневматического обогащения асбестовых руд | 1961 |
|
SU150443A1 |
СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ИЗВЛЕЧЕНИЯ АСБЕСТОВЫХ КОНЦЕНТРАТОВ НА ПНЕВМАТИЧЕСКОЙ УСТАНОВКЕ С ВОЗДУХОПРИЕМНИКОМ ГРОХОТА, основанный на изменении распределения концентратов по ширине деки грохота путем изменения положения ее при отклонении распределения от заданного, отличающийся тем, что, с целью повышения оперативности управления процессом извлечения, измеряют разность разрежений в двух точках воздухоприемника по его боковым сторонам и положение деки корректируют пропорционально измеренной величине. :о :о со о СП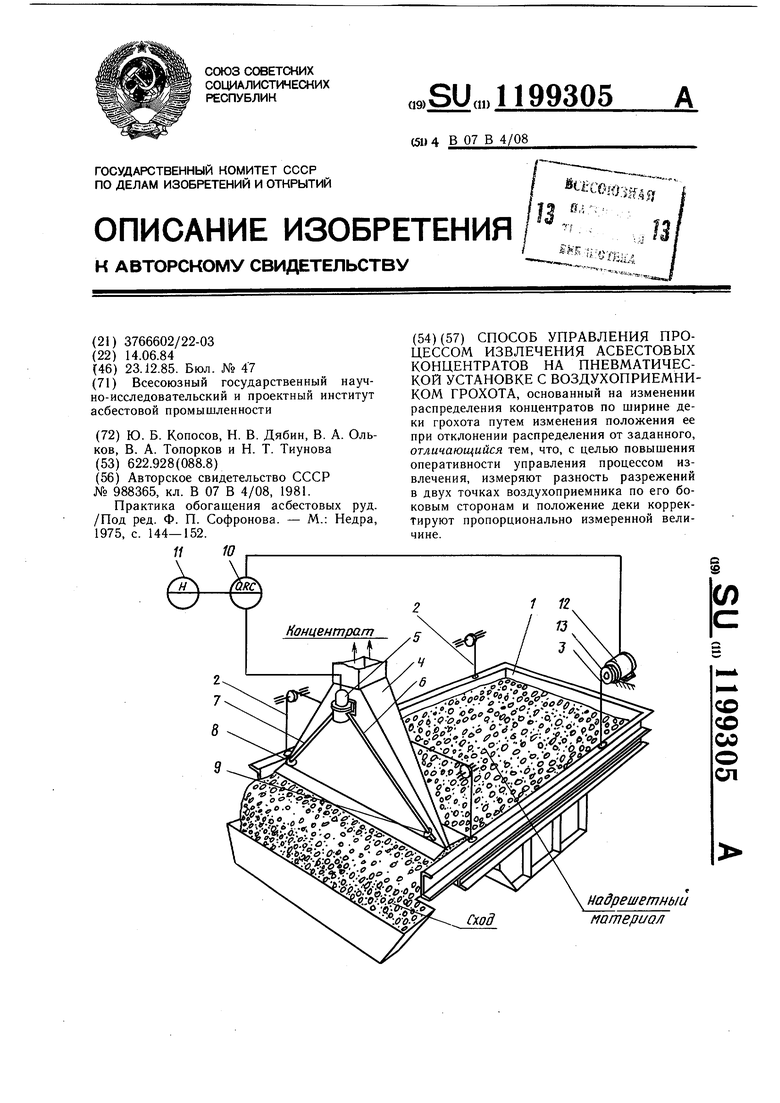
| Способ управления процессом извлечения асбестовых концентратов на пневматической установке | 1981 |
|
SU988365A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Практика обогащения асбестовых руд | |||
| /Под ред | |||
| Ф | |||
| П | |||
| Софронова | |||
| - М.: Недра, 1975, с | |||
| Аппарат для электрической передачи изображений без проводов | 1920 |
|
SU144A1 |
| // ш | |||
