Изобретение относится к электротехнике, а именно к линейному электроприводу, и может быть использовано в качестве привода технологического оборудования, а также для подачи пруткового материала.
Цель изобретения - повьпиение надежности путем исключения перемещения штока при обесточенном электроприводе под действием внешних усилий.
На фиг. 1 изображен линейный электропривод, продольный, разрез; на фиг. 2 - эпюры работы электропривода без фазосдвигающих конденсаторов; на фиг. 3 - то же, с фазосдвигающими конденсаторами.
Линейный электропривод содержит корпус 1 объединенных вибраторов, служащий общим основанием двигателя и магнитопроводом обоих вибраторов, катушку 2 вибратора правого направления, катушку 3 вибратора левого направления, якорь 4 вибратора правого йаправления, якорь 5 вибратора левого направления, корпус 6 муфты правого направления, корпус 7 муфты левого направления, пружины 8 и 9 вибраторов, ведущие шарики 10 муфты правого направления, ведущие шарики 1 1 муфты левого направления , управляющие электромагниты муфт правого и левого направлений, состоящие из магнитопровода 12, катушки 13 и пружины 14, конические поверхности 15 корпуса 6 кинематически взаимодействующие с щариками Ю, конические поверхности 16 корпуса 7, взаимодействующие с шариками 11, стопорные механизмы муфт правого и левого направлений, состояпще из стопорящих шариков 17 и 18, пружин 19 и 20, конических поверхностей 21 и 22, взаимодействующих с шариками 17 или 18.
Внутренняя часть корпуса 1 вибратора имеет торцовые поверхности 23, взаимодействующие со стопорящими шариками 17и18, ав отключенном состоянии -отстоящие от них на расстоянии д . На торцах корпусов 6 и 7 муфт закреплены нажимные подпружиненные втулки 24, торцы 25 которых кинематически взаимодействуют с ведущими шариками 10 и 11. Центральное отверстие корпуса 1 покрыто, например, фторопластовой пленкой 26 с липким односторонним слоем и через него проходит шток 27, являющийся
х
4571062
движителем и передающий рабочее усилие .
Схема управления двигателем содержит автотрансформатор 28, ключ 29 выбора направления движения, под- строечный резистор 30 в цепи вибратора правого направления, подстроеч- ный резистор 31 в цепи вибратора ле-.
to вого направления, фазосдвигающие конденсаторы 32.
Электропривод работает следующим образом.
Посольку двигатель состоит из двух
15 симметричных частей и все элементы этих частей работают аналогично, рассмотрим работу двигателя при движении штока 27 вправо. Цока двигатель не подключен к источнику питания,
20 все шарики, задвигаемые своими пружинами в конусы, образованные коническими поверхностями и наружной поверхностью штока 27, заклинивают шток. При переводе из нейтрали влево ключ
25 29 подключает к автотрансформатору
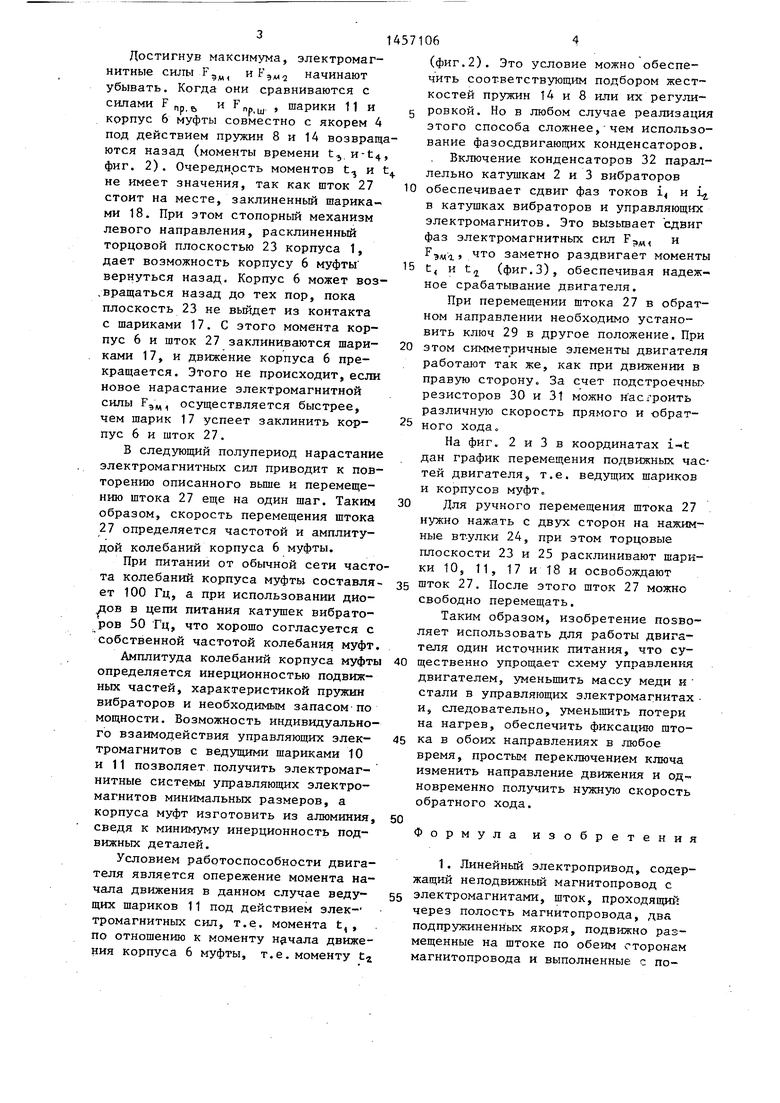
28 катушку 2 и включенные с ней по- следовательно управляющие электромагниты ведущих шариков 11. Переменный магнитный поток катушки 2, замы30 каясь через магнитопровод корпуса 1 . и якорь 4, создает пульсирующую электромагнитную силу РЗД, (фиг.2), приложенную к якорю 4. Одновременно переменный магнитный поток, наводимый
35 катушкой 13 в магнитопроводе 12, создает пульсирующую электромагнитную силу F,j,j , приложенную к шарику 11.
Электромагнитным силам и F-SM2 противодействуют усилия
40 8 РП„ „ и 14 Г„„. . Когда эти усипр. в пр. Ы
ЛИЯ сравниваются, начинается движение шариков 11 и якоря 4, а вместе с t
ним корпуса 6 муфты (моменты t, и
45
50
55
, фиг. 1). Шарики 11 расклинивают щток 27 и подготавливают его к перемещению, в месте .с тем шарики 10 оставляют его заклиненньм с корпусом 6 муфты, следовательно, шток 27 перемещается вместе с корпусом 6 муфты.
С началом движения корпуса 6 муфты совместно со штоком 27 после преодоления зазора Л ,3 мм шарики 17 вступают в контакт с торцовой плоскостью 23, расклинивая стопорящий механизм левого направления. Когда якорь 4 полностью притянется, шток 27 захватывается стопоряш м механизмом правого направления, а именно щариками 18,
Достигнув максимума, электромагнитные силы F,, HF,,, начинают убывать. Когда они сравниваются с силами F „р и . , шарики 11 и корпус 6 муфты совместно с якорем 4 под действием пружин 8 и 14 возвращются назад (моменты времени t, и-t4 фиг. 2). Очередность моментов t и не имеет значения, так как шток 27 стоит на месте, заклиненный шариками 18. При этом стопорный механизм левого направления, расклиненный торцовой плоскостью 23 корпуса 1, дает возможность корпусу 6 муфты вернуться назад. Корпус 6 может воз .вращаться назад до тех пор, пока плоскость 23 не выйдет из контакта с шариками 17. С этого момента корпус 6 и шток 27 заклиниваются шариками 17, и движение корпуса 6 прекращается. Этого не происходит, если новое нарастание электромагнитной силы Р,ц,, осуществляется быстрее, чем шарик 17 успеет заклинить корпус 6 и шток 27.
В следующий полупериод нарастание электромагнитных сил приводит к повторению описанного вьш1е и перемещению штока 27 еще на один шаг. Таким образом, скорость перемещения штока 27 определяется частотой и амплитудой колебаний корпуса 6 муфты.
При питании от обычной сети частота колебаний корпуса муфты составляет 100 Гц, а при использовании диодов в цепи питания катушек вибраторов 50 Гц, что хорошо согласуется с собственной частотой колебания муфт. Амплитуда колебаний корпуса муфты определяется инерционностью подвижных частей, характеристикой пружин вибраторов и необходимым запасом по мощности. Возможность индивидуального взаимодействия управляющих электромагнитов с ведущими шариками 10 и 11 позволяет получить электромаг- нитные системы управляющих электромагнитов минимальных размеров, а корпуса муфт изготовить из алюминия, сведя к минимуму инерционность подвижных деталей.
Условием работоспособности двигателя является опережение момента начала движения в данном случае ведущих шариков 11 под действием электромагнитных сил, т.е. момента t,, по отношению к моменту начала движения корпуса 6 муфты, т.е. моменту t
(фиг.2). Это условие можно обеспечить соответствующим подбором жест- костей пружин 14 и 8 или их регули5 РОБКОЙ. Но в любом случае реализация этого способа сложнее, чем использование фазосдвигающих конденсаторов.
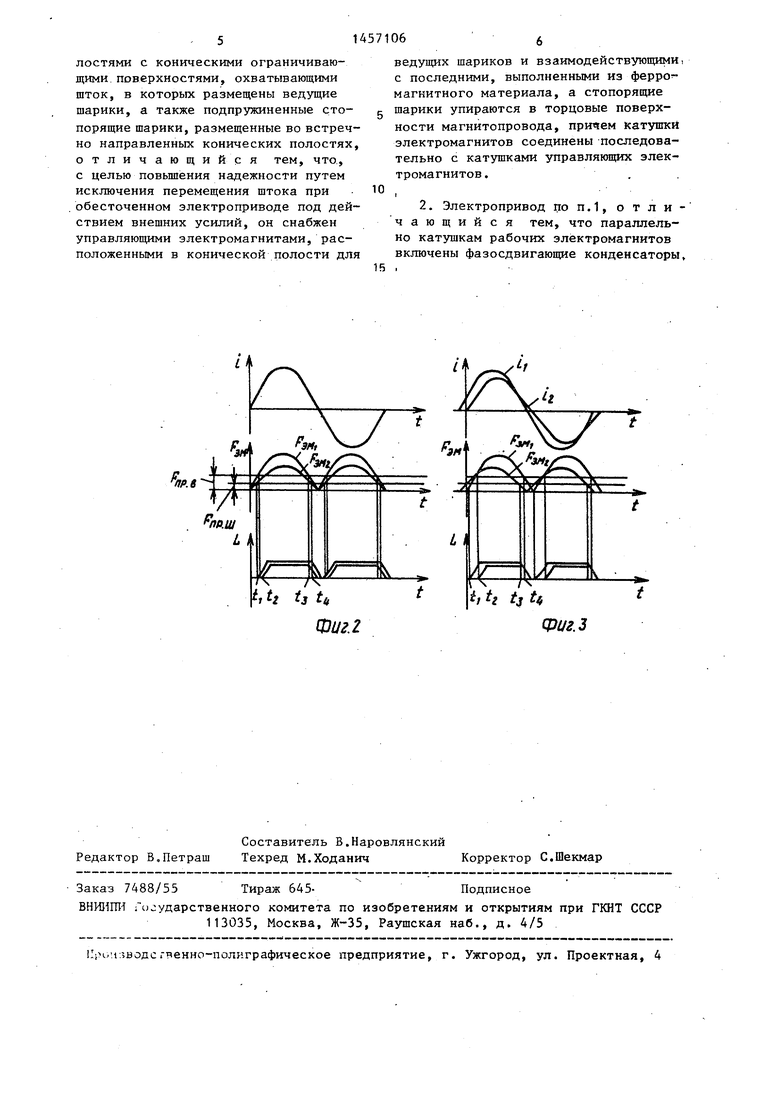
Включение конденсаторов 32 параллельно катушкам 2 и 3 вибраторов
10 обеспечивает сдвиг фаз токов i и ij в катушках вибраторов и управляющих электромагнитов. Это вызьшает сдвиг
фаз
F
электромагнитных сил F
М1
15
эмг что заметно раздвигает моменты t и t (фиг.З), обеспечивая надеж20
30
ное срабатывание двигателя.
При перемещении штока 27 в обратном направлении необходимо установить ключ 29 в другое положение. При этом симметричные элементы двигателя работают так же, как при движении в правую сторону. За счет подстроечньп резисторов 30 и 31 можно настроить различную скорость прямого и -обрат- 5 ного хода.
На фиг. 2 и 3 в координатах i-t дан график перемещения подвижных частей двигателя, т.е. ведущих шариков и корпусов муфт„
Для ручного перемещения штока 27 нужно нажать с двух сторон на нажимные вт.улки 24, при этом торцовые плоскости 23 и 25 расклинивают шарики 10, 11, 17 и18 и освобождают шток 27. После этого шток 27 можно свободно перемещать.
Таким образом, изобретение позволяет использовать для работы двигателя один источник питания, что существенно упрощает схему управлен1гя двигателем, уменьшить массу меди и стали в управляющих электромагнитах - и, следовательно, уменьшить потери на нагрев, обеспечить фиксацию штока в обоих направлениях в любое время, простым переключением ключа изменить направление движения и одновременно получить нужную скорость обратного хода.
5
0
5
50
Формула изобретения
1. Линейный электропривод, содержащий неподвижный магнитопровод с 55 электромагнитами, шток, проходящий через полость магнитопровода, два подпружиненнььх якоря, подвижно размещенные на штоке по обеим с-торонам магнитопровода и выполненные с полостями с коническими ограничивающими, поверхностями, охватывающими шток, в которых размещены ведущие шарики, а также подпружиненные QTO- порящие шарики, размещенные во встречно направленных конических полостях, отличающийся тем, что., с целью повышения надежности путем исключения перемещения штока при обесточенном электроприводе под действием внешних усилий, он снабжен управляющими электромагнитами, расположенными в конической полости для
ведущих шариков и взаимодействующими с последними, выполненными из ферро - магнитного материала, а стопорящие шарики упираются в торцовые поверхности магнитопровода, причем катушки электромагнитов соединены последовательно с катушками управляющих электромагнитов .. .
г
2. Электропривод поп.1, отличающийся тем, что параллельно катушкам рабочих электромагнитов включены фазосдвигающие конденсаторы.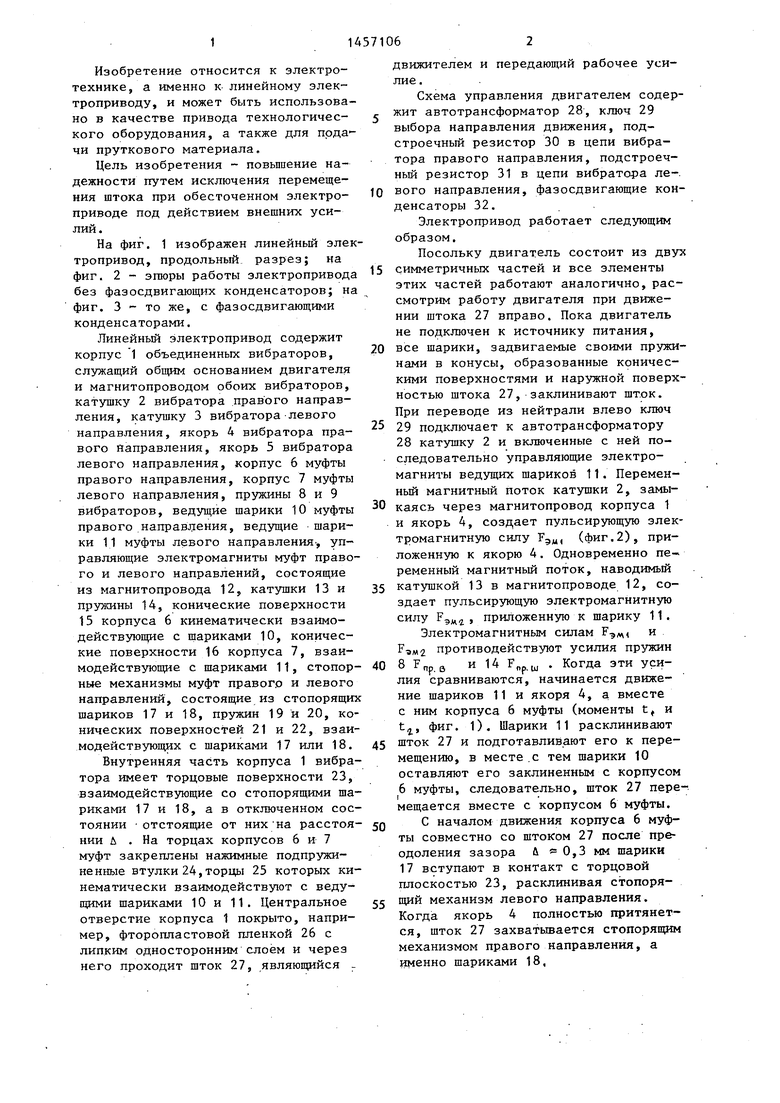
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНЫЙ ДВИГАТЕЛЬ | 1969 |
|
SU243026A1 |
| Линейный шаговый двигатель | 1981 |
|
SU1047358A1 |
| Вибрационный электродвигатель | 1986 |
|
SU1418861A1 |
| Линейный шаговый электродвигатель | 1981 |
|
SU985893A1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1992 |
|
RU2021909C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД РЕЗОНАНСНОГО ВИБРАТОРА | 1998 |
|
RU2146412C1 |
| Устройство для введения препаратов | 1985 |
|
SU1452525A1 |
| ЭЛЕКТРОМАГНИТНАЯ ФРИКЦИОННАЯ МУФТА-ТОРМОЗ | 1988 |
|
RU2027087C1 |
| Линейный двигатель | 1981 |
|
SU970017A1 |
| ПРИВОД К МНОГОКОНТАКТНОМУ СТРЕЛОЧНОМУ И МАРШРУТНО-СИГНАЛЬНОМУ КОММУТАТОРУ АППАРАТА ЭЛЕКТРИЧЕСКОЙ ЦЕНТРАЛИЗАЦИИ | 1937 |
|
SU57393A1 |
Изобретение откосится к электротехнике, к приводам линейных перемещений, и может быть использовано в различном технологическом оборудовании, а также в качестве механизма подачи пруткового материала. Цель состоит в повышении надежности путем исключения перемещения штока при обесточенном электроприводе под 4 2« . 79 21 77 f7 действием внешнего усилия. Устройство выполнено в виде 2 симметричных частей, объединенных общим корпусом .1 электромагнитов, при этом каждая из частей содержит катушки вибраторов 2 или 3, подпружиненные якоря 4 или 5, соединенные с корпусами муфт 6 или 7. Каждая муфта содержит группу ведущих шариков 10 или 11 и группу стопорящих шариков 17 или 18, взаимодействующих каждая со своей конической поверхностью и штоком. Ведущие шарики 10 и 11 индивидуально взз имодействуют с управляющими электромагнитами. Катушки вибраторов 2 и 3 одной части соединены электрически последовательно с катушками управляющих электромагнитов другой части и запитаны от одного источника. 1 а.п. ф-лы, 3 ил. С SS ii сл «ч 
.з
| ЛИНЕЙНЫЙ ДВИГАТЕЛЬ | 0 |
|
SU243026A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Линейный шаговый двигатель | 1981 |
|
SU1047358A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
