fS
12 И // 10 / /
16
i
(Л
СХ) 00 05
Ь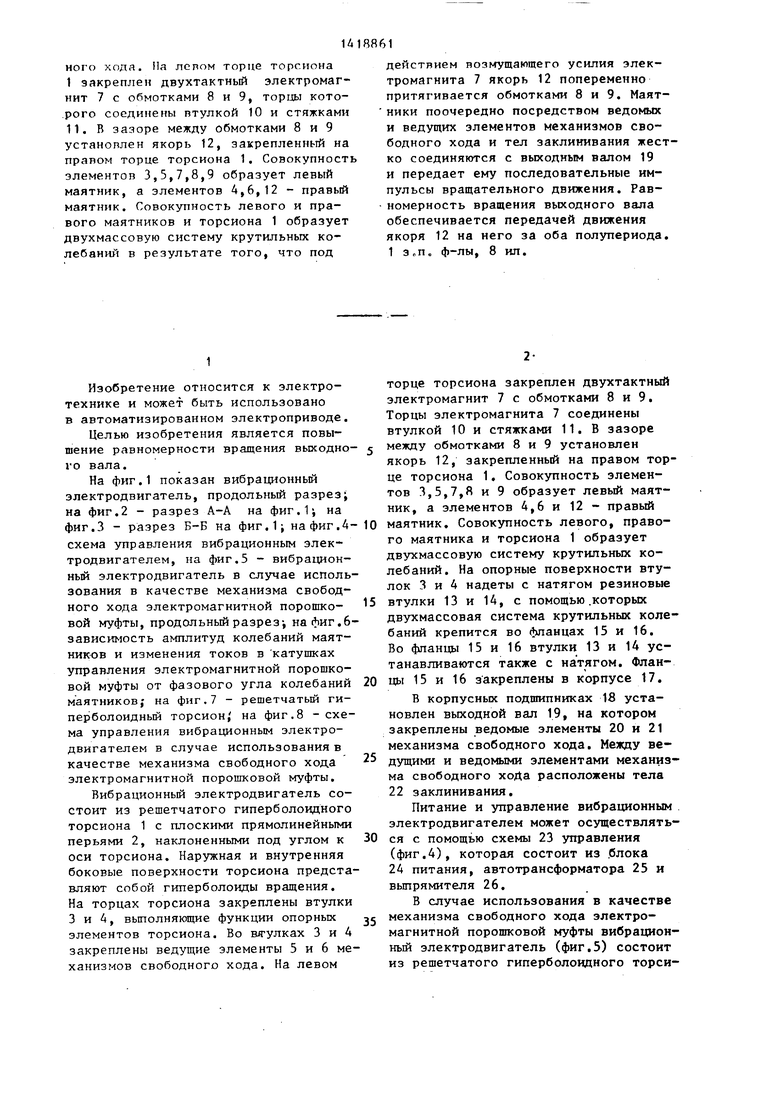
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибрационная машина для обработки в контейнере деталей | 1977 |
|
SU707781A1 |
| Вибрационный бункерный питатель | 1974 |
|
SU897657A1 |
| Вибрационная машина для обработки деталей в контейнере | 1977 |
|
SU680863A1 |
| Стенд для испытаний рулевых механизмов | 1988 |
|
SU1548693A1 |
| Фрикционная электромагнитная муфта | 1985 |
|
SU1305463A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ИЗДЕЛИЙ НА СОВМЕСТНОЕ ВОЗДЕЙСТВИЕ ВИБРАЦИОННЫХ И ЛИНЕЙНЫХ УСКОРЕНИЙ | 2009 |
|
RU2396531C1 |
| Инерционный стенд для испытания фрикционных тормозов | 1981 |
|
SU1083087A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2017 |
|
RU2643903C1 |
| ВИБРАЦИОННАЯ ЩЕКОВАЯ ДРОБИЛКА | 2012 |
|
RU2492931C1 |
| Тяговый привод локомотива | 1977 |
|
SU725928A1 |
Изобретение относится к электротехнике и может быть использовано в автоматизированном электроприводе, Цель состоит в повышении равномерности вращения выходного вала. Устройство состоит из решетчатого гипербо- лоидного торсиона 1 с плоскими прямолинейными перьями 2, Во втулках 3 и 4, выполняющих функции опорных элементов торсиона 1, закреплены ведущие элементы 5 и 6 механизмов свобод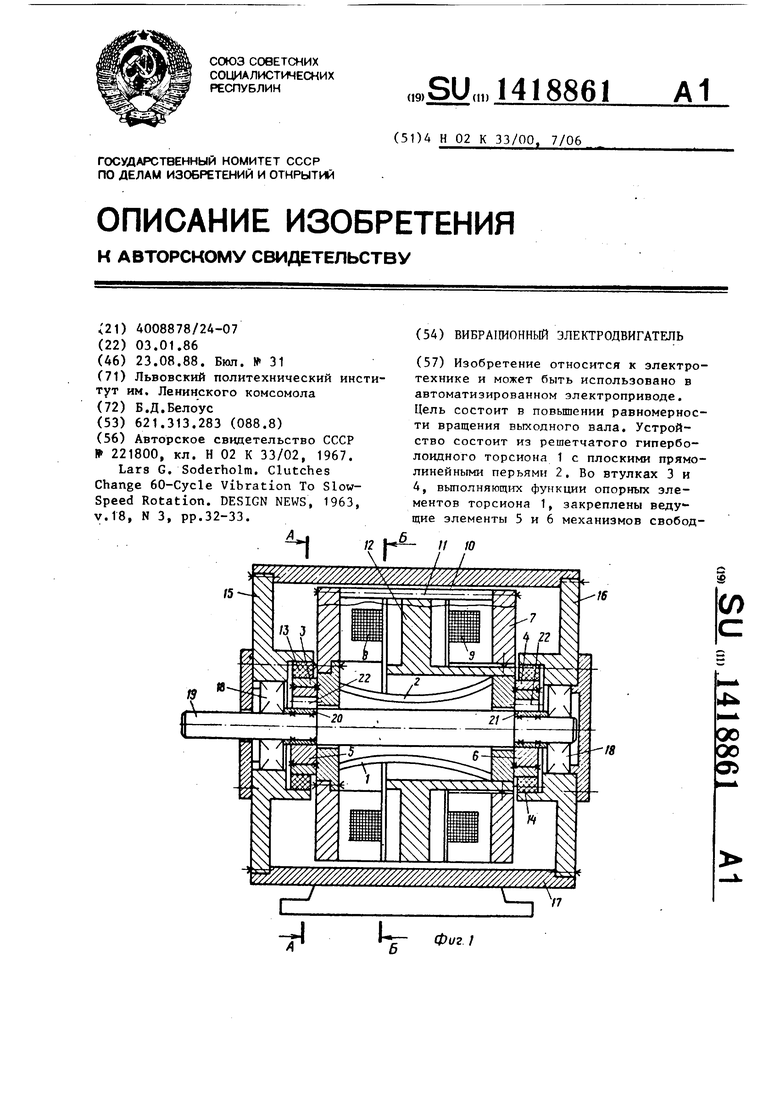
фиг t
ного хода. На лспом торце торсиона 1 закреплен двухтактный электромагнит 7 с обмотками 8 и 9, торцы кото- .рого соединены втулкой 10 и стяжками 11. В зазоре между обмотками 8 и 9 установлен якорь 12, закрепленный на правом торце торсиона 1. Совокупност элементов 3,5,7,8,9 образует левый маятник, а элементов 4,6,12 - правый маятник. Совокупность левого и правого маятников и торсиона 1 образует двухмассовую систему крутильных колебаний в результате того, что под
1
Изобретение относится к электротехнике и может быть использовано в автоматизированном электроприводе.
Целью изобретения является повышение равномерности вращения выходного вала.
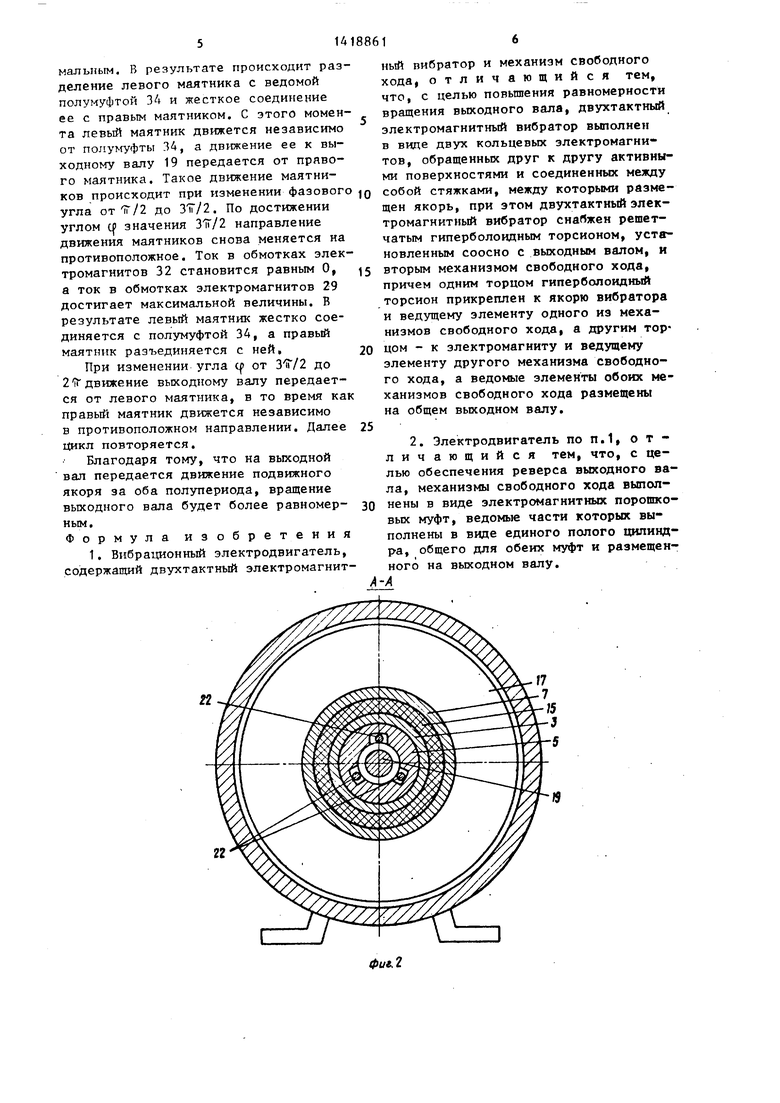
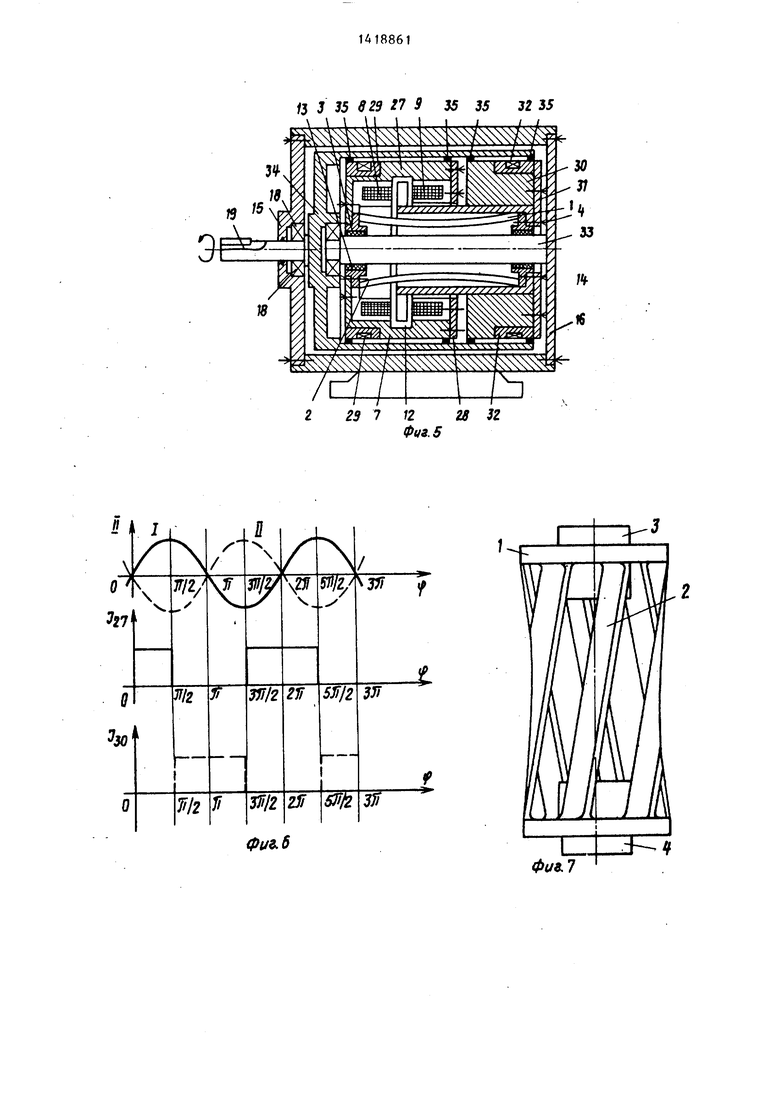
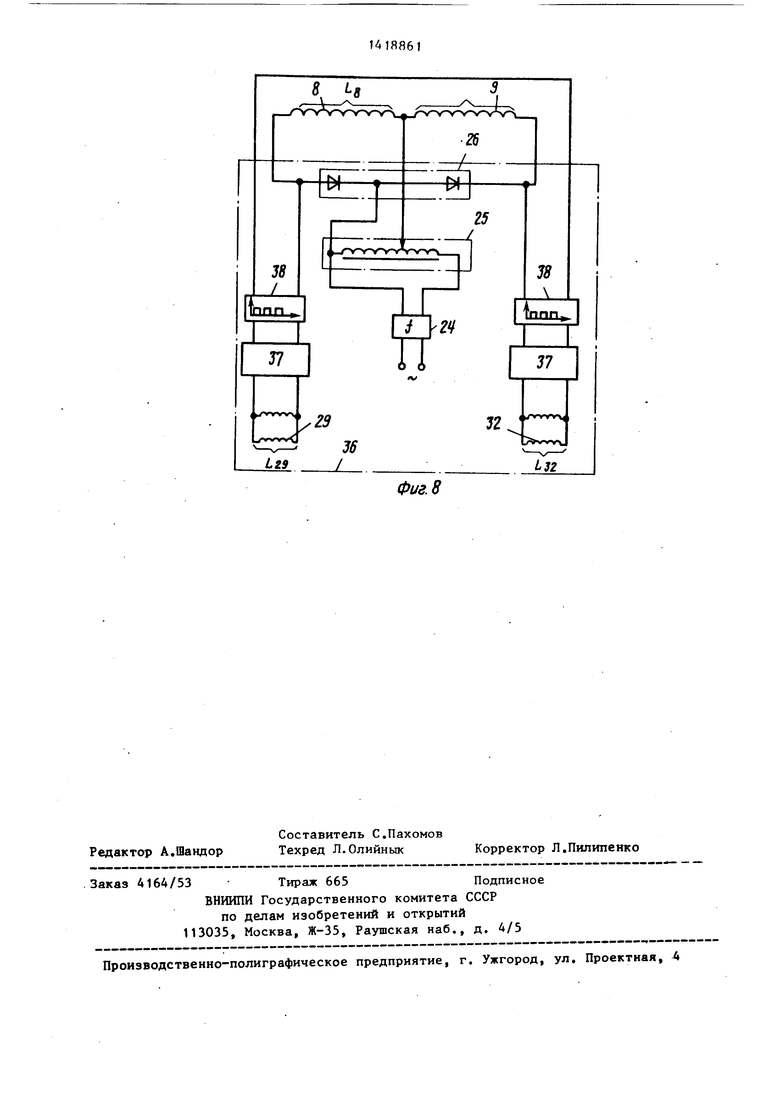
На фиг.1 показан вибрационный электродвигатель, продольный разрез; на фиг.2 - разрез А-А на фиг.1j на фиг.З - разрез Б-Б на фиг.1; на фиг.А- схема управления вибрационным электродвигателем, на фиг.З - вибрацион- ньй электродвигатель в случае использования в качестве механизма свободного хода электромагнитной порошковой муфты, продольный разрез-, на фиг.6- зависимость амплитуд колебаний маятников и изменения токов в катущках управления электромагнитной порошковой муфты от фазового угла колебаний маятников; на фиг.7 - решетчатый ги- перболоидный торсион, на фиг.8 - схема управления вибрационным электродвигателем в случае использования в качестве механизма свободного хода электромагнитной порошковой муфты.
Вибрационный электродвигатель состоит из решетчатого гиперболоидного торсиона 1 с плоскими прямолинейными перьями 2, наклоненными под углом к оси торсиона. Наружная и внутренняя боковые поверхности торсиона представляют собой гиперболоиды вращения. На торцах торсиона закреплены втулки 3 и 4, выполняющие функции опорных элементов торсиона. Во влгулках 3 и 4 закреплены ведущие элементы 5 и 6 механизмов свободного хода. На левом
действием возмущающего усилия электромагнита 7 якорь 12 попеременно притягивается обмотками 8 и 9. Маят- НИКИ поочередно посредством ведомых и ведущих элементов механизмов свободного хода и тел заклинивания жестко соединяются с выходным валом 19 и передает ему последовательные импульсы вращательного движения. Равномерность вращения вькодного вала обеспечивается передачей движения якоря 12 на него за оба полупериода. 1 ЗсП, ф-лы, В ил.
торце торсиона закреплен двухтактный электромагнит 7 с обмотками 8 и 9. Торцы электромагнита 7 соединены втулкой 10 и стяжками 11. В зазоре
между обмотками 8 и 9 установлен
якорь 12, закрепленный на правом торце торсиона 1. Совокупность элементов 3,5,7,8 и 9 образует левый маятник, а элементов 4,6 и 12 - правый
маятник. Совокупность левого, правого маятника и торсиона 1 образует двухмассовую систему крутильных колебаний. На опорные поверхности втулок 3 и 4 надеты с натягом резиновые
втулки 13 и 14, с помощью.которых двухмассовая система крутильных колебаний крепится во фланцах 15 и 16. Во фланцы 15 и 16 втулки 13 и 14 устанавливаются также с натягом. Фланцы 15 и 16 закреплены в корпусе 17.
В корпусных подшипниках 18 установлен выходной вал 19, на котором закреплены ведомые элементы 20 и 21 механизма свободного хода. Между ве
дущими и ведомыми элементами механизма свободного хоДа расположены тела 22 заклинивания.
Питание и управление вибрационным электродвигателем может осуществляться с помощью схемы 23 управления (фиг.4), которая состоит из .блока 24 питания, автотрансформатора 25 и выпрямителя 26.
В случае использования в качестве
механизма свободного хода электромагнитной порошковой муфты вибрационный электродвигатель (фиг.З) состоит из рещетчатого гиперболоидного торсиона 1, на левом торце которого закреплен двухтактный электромагнит 7, включающий обмотки 8 и 9, соединенны посредством вставки 27 и фланца 28. На вставке 27 закреплен электромагни .29 управления электромагнитной порошковой муфтой, В зазоре между обмотками 8 и 9 установлен якорь 12, закрепленный на правом торце торсиона 1. На Зтом же торце закреплена втулка 30, которая крепится к торсиону посредством фланца 31. На втулке 30 закреплен электромагнит 32 управления электромагнитной порошковой муфтой.
Совокупность элементов 3,7,8,9, 27,28 и 29 образует левый маятник, а совокупность 12,30,31 и 32 - правый маятник. Маятники выполняют функции ведущих полумуфт электромагнитной порошковой муфты. Совокупность левого, правого маятников и торсиона 1 образует двухмассовую систему крутильных колебаний, которая посредством втулок 3 и 4 через резиновые втулки 13 и 14 крепится на стержне
во фланце 16. В корпусных подшипниках 18 установлен выходной вал 19, на котором закреплена ведомая полумуфта
Схема 36 управления (фиг.8) вибрационным электродвигателем в случае использования электромагнитной порошковой муфты конструктивно объединена со схтемой управления электромагнитной порошковой муфтой и состоит из блока 24 питания, автотрансформатора 25, вьшрямителя 26, фазорегулирующего устройства 37 и блоков 38 для формирования прямоугольных импульсов тока управления электромагнитной порошковой муфтой.
Вибрационный электродвигатель работает следующим образом.
После подачи на двигатель питания под действием возмущающего усилия электромагнита якорь 12 попеременно притягивается обмотками 8 и 9. В результате этого в двухмассовой системе крутильных колебаний, состоящей из торсиона 1, левого и правого маятников, возникают крутильные колебания. Левый и правый маятники при этом колеблются в противофазе, а колебания
их носят синусоидальный характер. Начав колебаться, маятники поочередно, посредством ведомых и ведущих элементов механизмов свободного хода и тел заклинивания, жестко соединяются с выходным валом 19 и передают ему последовательные и тульсы вращательног движения. Таким образом происходит непрерывное вращение вала 19. Регулирование скорости вращения вьгходно- го вала 19 осуществляется путем изменения напряжения, питающего обмотки 8 и 9, с помощью автотрансформатора 25 или с помощью изменения частоты питающего обмотки 8 и 9 напряжения. Изменение частоты питакнцего эти обмотки напряжения осуществляется с помощью блока 24.
В случае использования в качестве механизма свободного хода электромагнитной порошковой муфты вибради- онньй электродвигатель (фиг.5) работает следующим образом,
После подачи на двигатель питания начинает работать электромагнит 7, под действием возмущающего усилия которого в двухмассовой системе крутильных колебаний возникают крутипь- ные колебания, которые происходят в противофазе и носят синусоидальньй характер. Зависимость амплитуды колебаний маятников от фазрвого угла приведена на фиг.6, где кривая I относится к левому маятнику, а кривая II - к правому. Допустим, что в момент ср 0 левый маятник движется против хода часовой стрелки (фиг.6), т.е. по направлению, в котором необходимо вращать выходной вал. В это же время правый маятник движется в противоположную сторону. В этот момент -сигнал управления, предварительно пройдя через блоки 37 и 38 (фиг.8), поступает на обмотки электромагнитов 29. В результате происходит жесткое соединение левого маятника и ведомой полумуфты 34. С этого момента движение маятника передается выходному
валу 19. I
Совместное движение маятника и
выходного вала продолжается до момента достижения углом ср значения, равного . В этот момент времени направление движения маятников меняется на противоположное. Ток управления в катушках электромагнитов 29 становится равным О, а ток в катушках электромагнитов 32 становится макСимальным. В результате происходит разделение левого маятника с ведомой полумуфтой 34 и жесткое соединение ее с правым маятником. С этого момента левый маятник движется независимо от пo:Iy гyфты 34, а движение ее к выходному валу 19 передается от правого маятника. Такое движение маятников происходит при изменении фазовог угла от ЧГ/2 до ЗТ/2. По достижении углом {О значения 31Т/2 направление движения маятников снова меняется на противоположное. Ток в обмотках электромагнитов 32 становится равным О, а ток в обмотках электромагнитов 29 достигает максимальной величины. В результате левый маятник жестко соединяется с полумуфтой 34, а правый маятник разъединяется с ней,
При изменении угла (f от 3 ir/2 до 2 i движение выходному валу передается от левого маятника, в то время как правый маятник движется независимо в противоположном направлении. Далее цикл повторяется.
Благодаря тому, что на выходной вал передается движение подвижного якоря за оба полупериода, вращение выходного вала будет более равномер-
НЬП4.
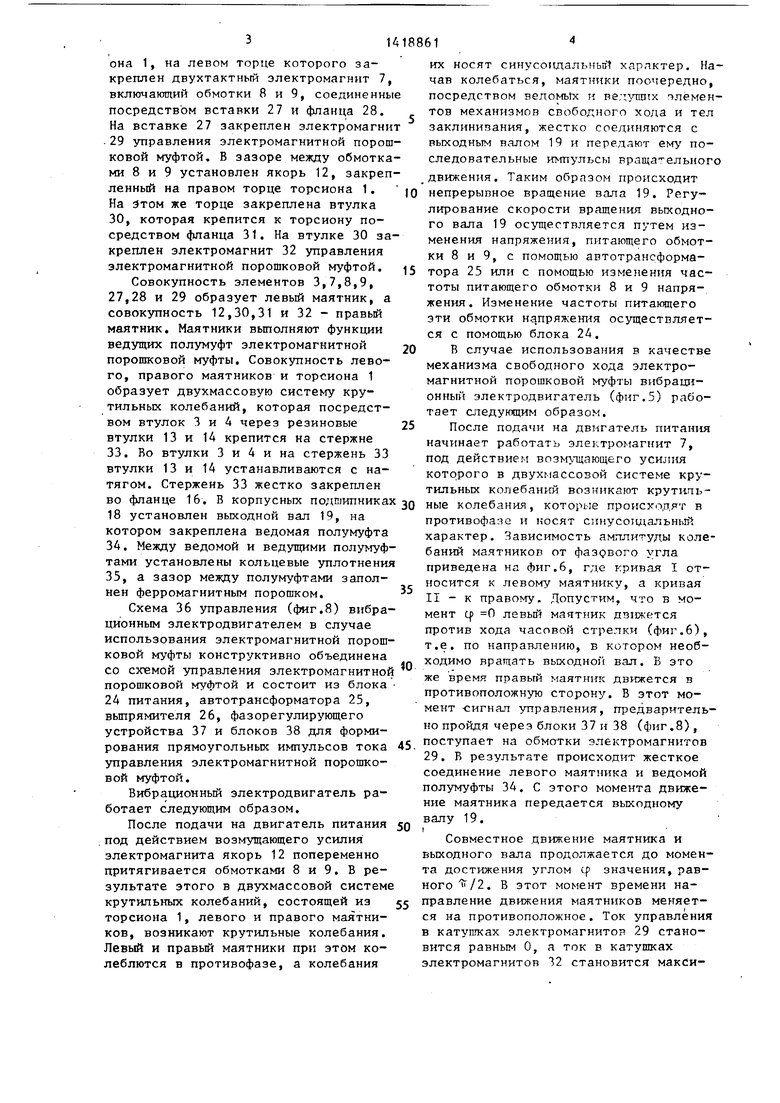
Формула изобретения 1. Вибрационный электродвигатель, содержащий двухтактный электромагнит22
ный вибратор и механизм свободного хода, отличающийся тем, что, с целью повышения равномерности вращения выходного вала, двухтактный электромагнитный вибратор выполнен в виде двух кольцевых электромагнитов, обращенных друг к другу активными поверхностями и соединенных между собой стяжками, между которыми размещен якорь, при этом двухтактный электромагнитный вибратор снабжен решетчатым гиперболоидным торсионом, установленным соосно с выходным валом, и вторым механизмом свободного хода, причем одним торцом гиперболоидный торсион прикреплен к якорю вибратора и ведущему элементу одного из механизмов свободного хода, а другим торцом - к электромагниту и ведущему элементу другого механизма свободного хода, а ведомые элементы обоих механизмов свободного хода размещены на общем выходном валу.
ю
17
Фиг.З
f3 J к 829 27 9 35 35 32 35
Фиг. 6
Фиг,
LZ9
in
Фиг. В
| 0 |
|
SU221800A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Lara G | |||
| Soderholm | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| DESIGN NEWS, 1963, V.18, N 3, pp.32-33. | |||
