1
Изобретение относится к электротехнике, а именно к частотно-регулируемым электроприводам, построенным на основе асинхронного двигателя и . преоб|)азователя частоты с автономным инвертором напряжения и реверсивным рыпрямителем, и может быть использовано для механизмов общепромышленного назначения.
Целью изобретения является повьше- ние надежности, работы при , частотном торможении с высокой частоты.
На фиг. 1 представлена функциональная схема устройства для частот- ного управления асинхронным двигателем; на фиг. 2 - схема системы управления реверсивным выпрямителем; на фиг. 3 - нелинейный блок, реализую- щнй зависимость амплитуды напряжения статора от частоты; на фиг. 4 - за- датчик интенсивности.
Устройство для частотного управления асинхронным двигателем 1 (фиг. I) содержит автономный инвертор 2 напря- жения, предназначенный для подключения к двигателю 1, реверсивный выпрямитель 3, подключенный выходом через датчик 4 тока и ЬС-фильтр 5 к входу автономного инвертора 2 напряжения, систему 6 управления автономным инвертором напряжения, систему 7 управления с входом 8 по фазе, вхсЗдом 9 для сигнала тока, входом 10 для задания направления тока и тремя выходами, два из которых соединены с .управляющим входом реверсивного выпрямителя 3, последовательно соединенные- блок 11 задания, управляемый ключ 12, задатчик 13 интенсивности и нелинейный блок 14, реализующий зависимость амплитуды напряжения статора от частоты и выполненный с управляющим входом и выходом уставки ограничения, регулятор 15 напряжения, подключенный одним входом к выходу нелинейного блока 14, а выходом - к одному из входов регулятора 16 тока, соединенного выходом с входом 8. управления по фазе системы 7 управления ревер- . сивным выпрямителем.
Устройство содержит также датчик 17 напряжения, установленный на входе автономного инвертора 2 напряжения и подключенный вькодом к другому входу .регулятора 15 напряжения, элемент НЕ 18, подключенный входом к третьему выходу системы 7 управления, и командоаппарат 19.
Выход датчика 4 тока подключен к входу 9 для сигнала тока системы 7 управления выпрямителем и к другому входу регулятора 16 тока. Выход за- датчика 13 интенсивности подключен к входу системы 6 управления автономным инвертором напряжения, а выход регулятора 15 напряжения - к входу 10 дпя
задания направления тока системы 7 управления выпрямителем.
В устройство введены элемент ИЛИ 20, элемент И 21 и компаратор 22, один.вход которого подключен к выходу датчика 17 напряжения, другой вход соединен с выходом уставки ограничения нелинейного блока 14, а выход
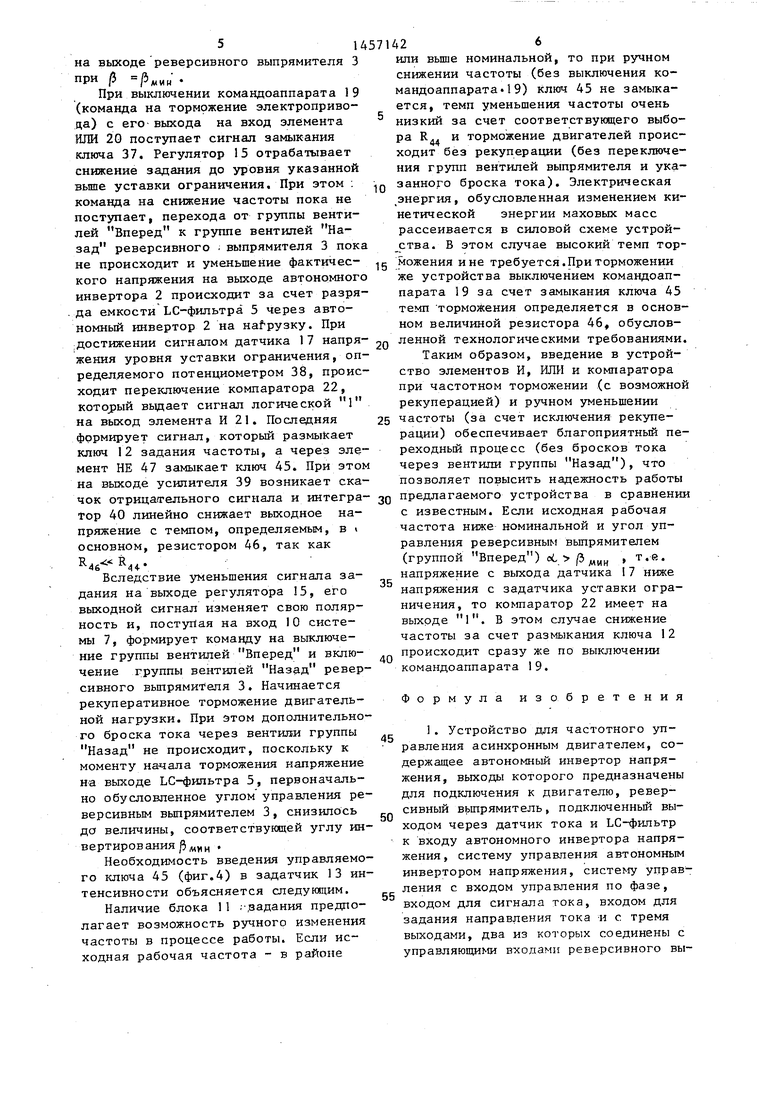
выходу элемента НЕ 47, выход которого образует управляющий вход задатчи- ка 13 интенсивности, подключенный к выходу элемента И 21.
Устройство для частотного управления асинхронным двигателем работает следующим образом.
Пусть в исходном состоянии коман
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1986 |
|
SU1378003A1 |
| Реверсивный тиристорный преобразователь частоты | 1975 |
|
SU680123A1 |
| Устройство для торможения асинхронного электродвигателя | 1985 |
|
SU1343529A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
| Устройство для автоматического управления асинхронным электродвигателем в режиме рекуперативного торможения | 1990 |
|
SU1782332A3 |
| Устройство для управления электроприводом переменного тока | 1987 |
|
SU1432712A1 |
| Устройство для торможения асинхронного электродвигателя | 1985 |
|
SU1343530A1 |
| Электропривод | 1987 |
|
SU1427542A1 |
| Реверсивный вентильный электродви-гАТЕль | 1979 |
|
SU813608A1 |
| Устройство для управления электроприводом | 1978 |
|
SU783917A1 |

Изобретение относится к электротехнике и может быть использовано в механизмах общепромьшшенного назначения. Целью изобретения является по- вьшение надежности работы при частотном торможении с высокой .рабочей частотой. Устройство для частотного управления асинхронным двигателем снабжено элементом ИЛИ 20, элементом И 21 и компаратором 22. Один вход компаратора 22 соединен с выходом датчика I7 напряжения автономного инвертора 2 напряжения; другой вход компаратора 22 соединен с выходом уставки ограничения тока нелинейного блока 14, реализующего зависимость амплитуды напряжения статора от частоты. Выход компаратора 22 соединен с первым входом элемента И 21, второй вход которого объединен с вторым входом элемента ИЛИ 20 и подключен к выходу командоаппарата 19. Элемент ИЛИ 20 по первому входу и выходу включен между выходом элемента НЕ 18 и управi (Л
подключен к одному из входов элёмен- IQ доаппарат 19 включен, управляемый
та И 21, соединенного выходом с управляющим выводом управляемого ключа 12.
Один из входов элемента ИЛИ 20 подключен к выходу :элемента НЕ 18, другой вход элемента ИЛИ 20 объединен; с другим входом элемента И 21 и подключен к выходу командоаппарата 19, а выход элемента ИЛИ 20 соединен с управляющим входом нелинейного блока 14.
Система 7 управления реверсивным выпрямителем содержит блок фазового управления 23 (фиг.2), ключи 24 и 25
ключ 12 замкнут, блок 11 задания ч рез задатчик 13 интенсивности зада частоту питания двигателя 1 вьше н минальной. При этом на выходе усил
15 теля 39 (фиг.4) сигнал равен нулю. Работает группа вентилей Вперед прямителя 3. Рекуперативное тормож ние Двигательной нагрузки при сниж нии частоты обеспечивается автомат
2Q ческим переводом реверсивного вьшр мителя 3 в режим инвертора, ведомо сетью, путем запирания группы вент лей Вперед и отпирания группы ве тилей На зад. При этом, если мини
управления группами вентилей соответ- 25 мальный угол управления группой вен- ственно Вперед и Назад и переклю- тилей Вперед о мим миншчаль- чатель 26 групп вентилей, входы ко- ный угол управления группой вентилей торого образуют вход 9 для сигнала Назад (угол инвертирования), без- тока и вход 10 для задания направле- опасный с точки зрения коммутацион- ния тока. Выход блока 23 фазового уп- зо ой устойчивости инвертора, ведомого
равления подключен к входам ключей сетью, (3„,н 20-30 эл.град. Это озна- 24 и 25 управления. Управляющие выво. ды указанных ключей подключены к выходам переключателя 26 групп вентилей, один из выходов которого и выходы ключей 24 и 25 образуют выходы системы 6 управления реверсивным выпрямителем.
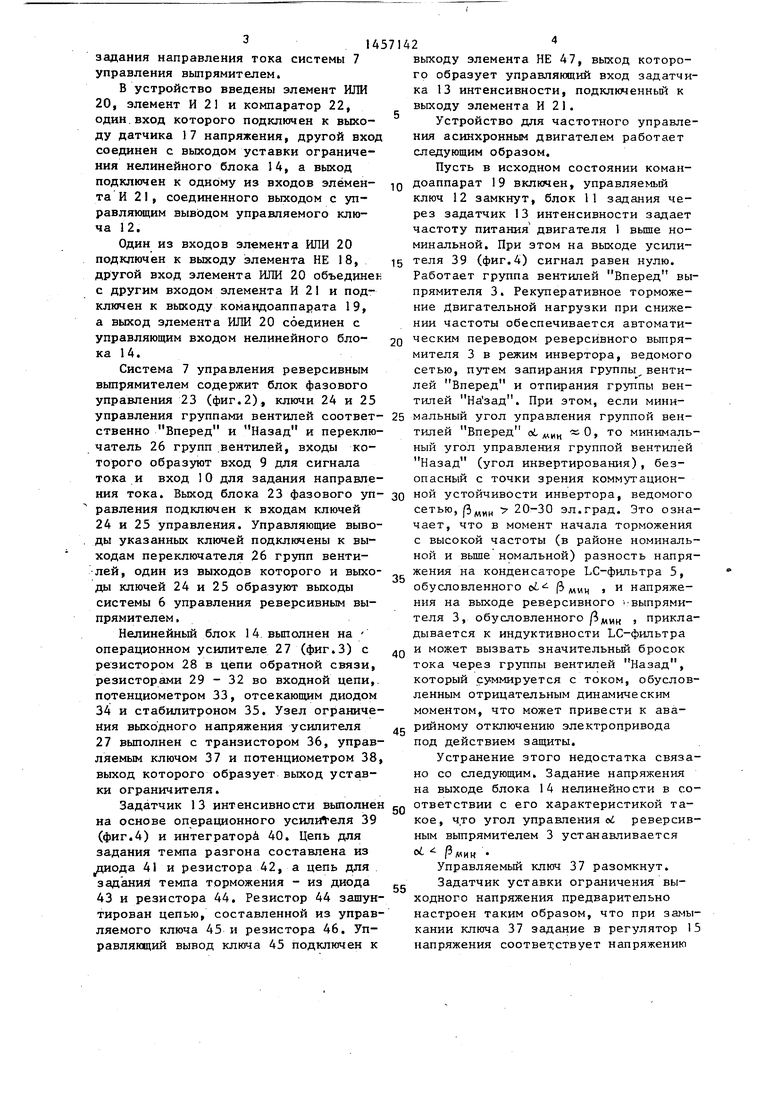
Нелинейный блок 14. выполнен на операционном усипителе 27 (фиг.3) с резистором 28 в цепи обратной связи, резисторами 29 - 32 во входной цепи,, потенциометром 33, отсекающим диодом
35
40
чает, что в момент начала торможения с высокой частоты (в районе номинальной и выше номальной) разность напряжения на конденсаторе LC-фильтра 5, обусловленного oL Эмми s и напряжения на выходе реверсивного выпрямителя 3, обусловленного прикладывается к индуктивности LC-фильтра и может вызвать значительньй бросок тока через группы вентилей Назад, который суммируется с током, обусловленным отрицательным динамическим моментом, что может привести к авачает, что в момент начала торможен с высокой частоты (в районе номина ной и выше номальной) разность нап жения на конденсаторе LC-фильтра 5 обусловленного oL Эмми s и напряж ния на выходе реверсивного выпрям теля 3, обусловленного прик дывается к индуктивности LC-фильтр и может вызвать значительньй бросо тока через группы вентилей Назад который суммируется с током, обусл ленным отрицательным динамическим моментом, что может привести к ав
34 и стабилитроном 35. Узел ограничения выходного напряжения усипителя g рийному отключению электропривода 27 выполнен с транзистором 36, управ- под действием защиты.
ляемым ключом 37 и потенциометром 38, выход которого образует выход уставки ограничителя.
Задатчик 13 интенсивности выполнен на основе операционного усилШ еля 39 (фиг.4) и интегратор 40. Цепь для задания темпа разгона составлена из ода 41 и резистора 42, а цепь для задания темпа торможения - из диода 43 и резистора 44. Резистор 44 зашун- тирован цепью, составленной из управляемого ключа 45 и резистора 46. Управляющий вывод ключа 45 подключен к
доаппарат 19 включен, управляемый
ключ 12 замкнут, блок 11 задания через задатчик 13 интенсивности задает частоту питания двигателя 1 вьше номинальной. При этом на выходе усилителя 39 (фиг.4) сигнал равен нулю. Работает группа вентилей Вперед выпрямителя 3. Рекуперативное торможение Двигательной нагрузки при снижении частоты обеспечивается автоматическим переводом реверсивного вьшря- мителя 3 в режим инвертора, ведомого сетью, путем запирания группы вентилей Вперед и отпирания группы вентилей На зад. При этом, если мини сетью, (3„,н 20-30 эл.град. Это озна-
35
40
чает, что в момент начала торможения с высокой частоты (в районе номинальной и выше номальной) разность напряжения на конденсаторе LC-фильтра 5, обусловленного oL Эмми s и напряжения на выходе реверсивного выпрямителя 3, обусловленного прикладывается к индуктивности LC-фильтра и может вызвать значительньй бросок тока через группы вентилей Назад, который суммируется с током, обусловленным отрицательным динамическим моментом, что может привести к рийному отключению электропривода под действием защиты.
0
5
Устранение этого недостатка связано со следующим. Задание напряжения на выходе блока 14 нелинейности в соответствии с его характеристикой такое, 4JO угол управления oi реверсивным выпрямителем 3 устанавливается
0
Управляемый ключ 37 разомкнут.
Задатчик уставки ограничения выходного напряжения предварительно настроен таким образом, что при замыкании ключа 37 задание в регулятор 15 напряжения соответствует напряжению
5 14571426
на выходе реверсивного выпрямителя 3или выше номинальной, то при ручном
ппч А -А снижении частоты (без выключения коПри p-pvHH л п 1C
При выключении командоаппарата 19мандоаппарата-19) ключ 45 не замыка- (команда на торможение электроприво-ется, темп уменьшения частоты очень да) с его- выхода на вход элемента низкий за счет соответствующего выбо- ИЛИ 20 поступает сигнал замыканияра R и торможение двигателей проис- ключа 37. Регулятор 15 отрабатываетходит без рекуперации (без переключе- снижение задания до уровня указаннойния групп вентилей выпрямителя и ука- выше уставки ограничения. При этом . Qзанного броска тока). Электрическая команда на снижение частоты пока не энергия, обусловленная изменением ки- поступает, перехода от группы венти-нетической энергии маховых масс лей Вперед к группе вентилей На-рассеивается в силовой схеме устрой- зад реверсивного / выпрямителя 3 пока ства. В этом случае высокий темп торне происходит и уменьшение фактичес- д можения ине требуется.При торможении кого напряжения на вькоде автономногоже устройства выключением командоап- инвертора 2 происходит за счет разря-парата 19 за счет замыкания ключа 45 .да емкости LC-фильтра 5 через авто-темп торможения определяется в основ- номный инвертор 2 на Hafpy3Ky. Прином величиной резистора 46, обуслов- достижении сигналом датчика 17 напря-jg ленной технологическими требованиями, жения уровня уставки ограничения, оп-Таким образом, введение в устрой- ределяемого потенциометром 38, проис-ство элементов И, ИЛИ и компаратора ходит переключение компаратора 22,при частотном торможении (с возможной который выдает сигнал логической 1 рекуперацией) и ручном уменьшении на выход элемента И 21. Последняя25 частоты (за счет исключения рекупе- фррмирует сигнал, который размыкаетрации) обеспечивает благоприятньй пе- ключ 12 задания частоты, а через эле-реходный процесс (без бросков тока мент НЕ 47 замыкает ключ 45. При этомчерез вентили группы Назад), что на выходе усилителя 39 возникает ска-позволяет повысить надежность работы чок отрицательного сигнала и интегра-зо предлагаемого устройства в сравнении тор 40 линейно снижает выходное на-с известным. Если исходная рабочая пряжение с темпом, определяемым, в .частота ниже номинальной и угол уп- основном, резистором 46, так какравления реверсивным выпрямителем .ф-(группой Вперед) оС /3,„„ ,т.е.
Вследствие уменьшения сигнала за-напряжение с выхода датчика 17 ниже
Дания на выходе регулятора 5, егонапряжения с задатчика уставки огравыходной сигнал изменяет свою поляр-ничения, то компаратор 22 имеет на
ность и, поступая на вход 10 систе-выходе 1. В этом случае снижение
мы 7, формирует команду на выключе-частоты за счет размыкания ключа 12
ние группы вентилей Вперед и вклю- происходит сразу же по выключении
чение группы вентилей Назад ревер-командоаппарата 19. сивного выпрямителя 3. Начинается
рекуперативное торможение двигатель-Формула изобретения ной нагрузки. При этом дополнительного броска тока через вентили группы К Устройство для частотного уп- Назад не происходит, поскольку к равления асинхронным двигателем, со- моменту начала торможения напряжениедержащее автономный инвертор напря- на выходе LC-фильтра 5, первоначаль-жения, выходы которого предназначены но обусловленное углом управления ре-для подключения к двигателю, ревер- версивным выпрямителем 3, снизипось сивный вьшрямитель, подключенный вы- да величины, соответствующей углу ин-ходом через датчик тока и LC-фильтр вертированияВ«,„ . автономного инвертора напря- Необходимость введения управляемо-жения, систему управления автономным го ключа 45 (фиг.4) в задатчик 13 ин-инвертором напряжения, систему управ- тенсивности объясняется следующим.ления с входом управления по фазе.
Наличие блока 11 .-.задания предпо-входом для сигнала тока, входом для
лагает возможность ручного изменениязадания направления тока и с тремя
частоты в процессе работы. Если ис-вькодами, два из которых соединены с
ходная рабочая частота - в районеуправляющими входами реверсивного выФи.
| Альтшулер И.А., Шевченко А,С | |||
| Асинхронный тиристорный электропривод рольгангов | |||
| - Промышленная энергетика, 1977, К 9, с | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1378003A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
