О
о
со
VJ CJ
4
Изобретение относится к электротехнике, а именно к устройствам для управления частотно-регулируемыми асинхронными электроприводами на основе преобразователей частоты с автономными инверторами тока, и может быть использовано в механизмах; требующих высоких динамических свойств в широком диапазоне регулирования частоты вращения, включая значения, близкие к нулевым, и при реверсах.
Цель изобретения - улучшение динамических и энергетических характеристик.
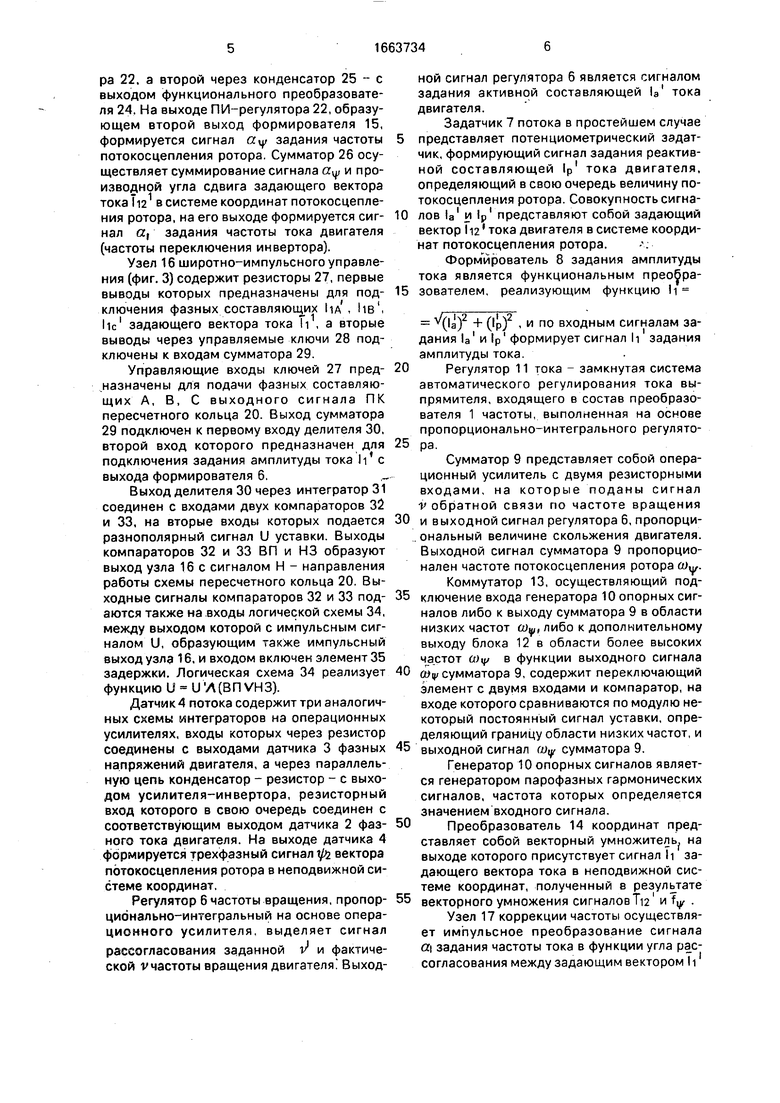
На фиг, 1 представлена функциональная схема устройства для управления асинхронным электродвигателем; на фиг, 2 - схема формирования сигналов задания частоты; на фиг. 3 - схема узла широтно-им- пульсного управления.
Устройство для управления асинхронным электродвигателем содержит преобразователь 1 частоты (фиг. 1) на основе автономного инвертора тока с управляющими входами тока и частоты и с соответствующими выводами, предназначенными для подключения к сети переменного тока и к обмоткам асинхронного электродвигателя, датчики 2 и 3 фазных токов и напряжений, подключенные выходами к соответствующим входам датчика 4 потока, блок 5 формирования задающих сигналов, выполненный с регулятором 6 частоты вращения, задатчиком 7 потока, формирователем 8 задания амплитуды тока, сумматором 9 и генератором 10 опорных сигналов, регулятор 11 тока и блок 12 управления частотой с пятью входами. При
этом задающий вход с сигнадом V1 и вход обратной связи с сигналом v регулятора 6 частоты вращения образуют соответствующие входы блока 6 формирования задающих сигналов. Выход регулятора 6 и выход задат- чика 7 потока подключены к входам формирователя 8 задания амплитуды тока. Входы сумматора 9 подключены соответственно к выходу и входу обратной связи регулятора 6 частоты вращения.
Выход формирователя 8, образующий выход блока 5 формирования задающих сигналов, подключен к входу регулятора 11 тока и к первому входу блока 12 управления частотой.
Выходы задатчика 7 потока и регулятора 6 образуют первую группу выходов, а выходы генератора 10 опорных сигналов вторую группу выходов блока 5, подключенные соответственно к второму и третьему входам блока 12 управления частотой, четвертый и пятый входы которого подключены соответственно к выходу датчика 4 потока и к выходу датчика 2 фазных токов. Выходы
блока 12 управления частотой и регулятора 11 тока подключены соответственно к управляющим входам частоты и тока преобразователя 1 частоты.
Блок 5 формирования задающих сигналов дополнительно снабжен двухвходовым управляемым коммутатором 13. Блок 12 управления частотой снабжен дополнительным выходом и выполнен с
преобразователем 14 координат, формирователем 15 сигналов задания частоты, узлом 16 широтно-импульсного управления и с последовательно соединенными узлом 17 коррекции частоты, задающим генератором
18, селектором 19 и пересчетным кольцом 20, выход которого образует основной выход блока 12.
Первые и вторые входы преобразователя 14 координат и формирователя 15 сигналов задания частоты соединены попарно между собой и образуют второй и третий входы блока 12, четвертый вход которого образован третьим входом формирователя 15. а пятый вход - первым входом узла 17
коррекции частоты, второй вход которого объединен с первым входом узла 16 и подключен к выходу преобразователя 14 координат.
Третий вход узла 17 коррекции частоты
объединен с вторым входом селектора 19 и подключен к первому выходу формирователя 15. Второй вход узла 16 широтно-импульсного управления образует первый вход блока 12, а третий вход узла 16 соединен с
выходом пересчетного кольца 20. Два выхода узла 16 подключены соответственно к третьему и четвертому входам селектора 19. Второй выход формирователя 15, образующий дополнительный выход блока 12,
подключен к одному из входов управляемого коммутатора 13, другой вход которого и управляющий вход соединены между собой и подключены к выходу сумматора 9. Выход управляемого коммутатора 13 соединен с
входом генератора 10 опорных сигналов.
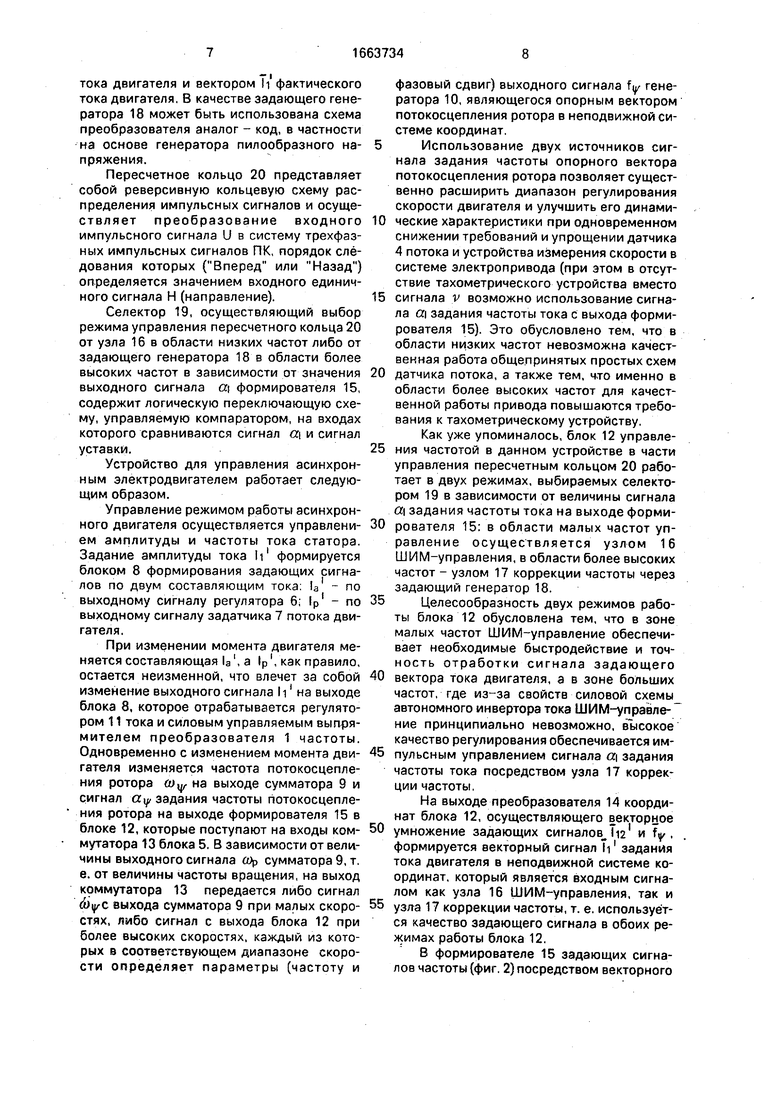
Формирователь 15 сигналов задания частоты содержит векторный умножитель 21 (фиг. 2) сигналов 1 и $,на выходе которого образуется сигнал, определяемый углом сдвига между входными векторами (мнимая часть векторного произведения), соединенный с его выходом пропорционально-интегральный (ПИ) регулятор 22, делитель 23 задающих сигналов а и Ip1,
выходом соединенный с входом функционального преобразователя 24, реализующего функцию arctg, дифференцирующий конденсатор 25 и сумматор 26, первый вход которого соединен с выходом ПИ-регулятоpa 22, а второй через конденсатор 25 - с выходом функционального преобразователя 24. На выходе ПИ-регулятора 22, образующем второй выход формирователя 15, формируется сигнал от у задания частоты потокосцепления ротора. Сумматор 26 осуществляет суммирование сигнала а и производной угла сдвига задающего вектора тока Ti2 в системе координат потокосцепления ротора, на его выходе формируется сигнал а, задания частоты тока двигателя (частоты переключения инвертора).
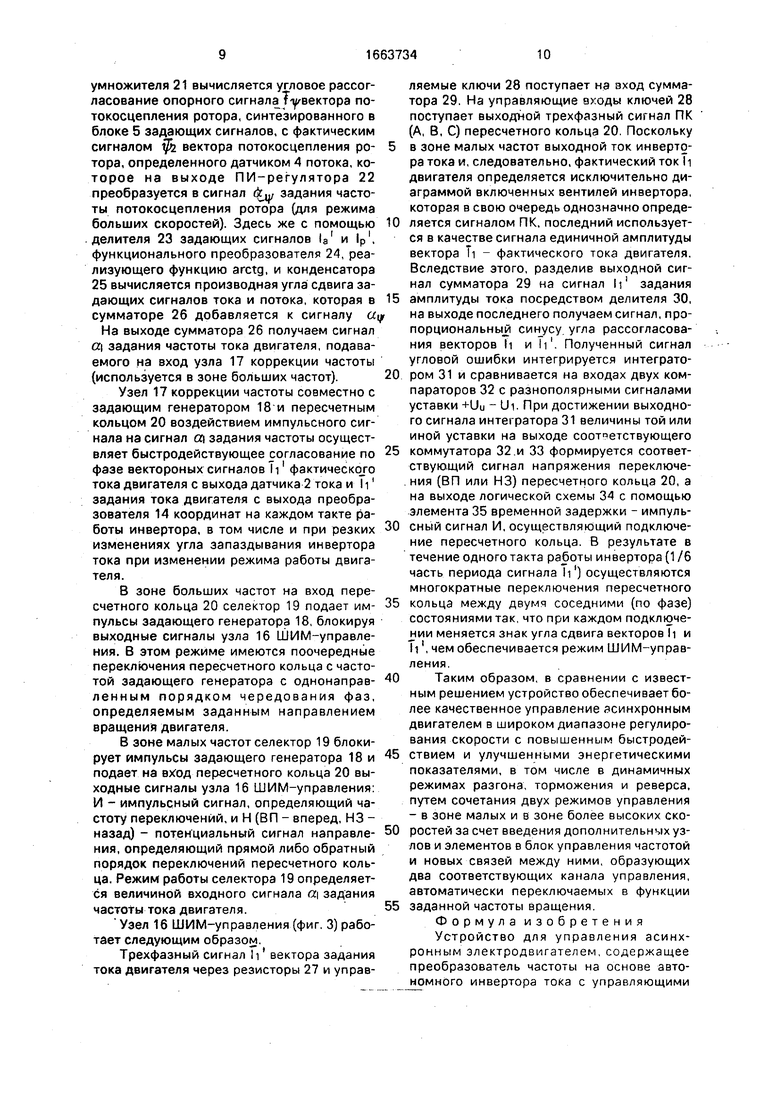
Узел 16 широтно-импульсного управления (фиг. 3) содержит резисторы 27, первые выводы которых предназначены для подключения фазных составляющих Ид , Ив1, Не задающего вектора тока И , а вторые выводы через управляемые ключи 28 подключены к входам сумматора 29.
Управляющие входы ключей 27 предназначены для подачи фазных составляющих А, В, С выходного сигнала ПК пересчетного кольца 20. Выход сумматора 29 подключен к первому входу делителя 30, второй вход которого предназначен для подключения задания амплитуды тока И с выхода формирователя 6.
Выход делителя 30 через интегратор 31 соединен с входами двух компараторов 32 и 33, на вторые входы которых подается разнополярный сигнал U уставки. Выходы компараторов 32 и 33 ВП и НЗ образуют выход узла 16 с сигналом Н - направления работы схемы пересчетного кольца 20. Выходные сигналы компараторов 32 и 33 подаются также на входы логической схемы 34, между выходом которой с импульсным сигналом U, образующим также импульсный выход узла 16, и входом включен элемент 35 задержки. Логическая схема 34 реализует функцию U UV(BnVH3).
Датчик 4 потока содержит три аналогичных схемы интеграторов на операционных усилителях, входы которых через резистор соединены с выходами датчика 3 фазных напряжений двигателя, а через параллельную цепь конденсатор - резистор - с выходом усилителя-инвертора, резисторный вход которого в свою очередь соединен с соответствующим выходом датчика 2 фазного тока двигателя. На выходе датчика 4 формируется трехфазный сигнал фг. вектора потокосцепления ротора в неподвижной системе координат.
Регулятор 6 частоты вращения, пропорционально-интегральный на основе операционного усилителя, выделяет сигнал
рассогласования заданной v1 и фактической V частоты вращения двигателя Выходной сигнал регулятора 6 является сигналом задания активной составляющей 1а тока двигателя.
Задатчик 7 потока в простейшем случае
представляет потенциометрический зэдат- чик, формирующий сигнал задания реактивной составляющей 1Р тока двигателя, определяющий в свою очередь величину потокосцепления ротора. Совокупностьсигналов 1а и 1р представляют собой задающий вектор 112 тока двигателя в системе координат потокосцепления ротора.
Формирователь 8 задания амплитуды тока является функциональным преобразователем, реализующим функцию Н
ч а)2 + (Ip)2 , и по входным сигналам задания 1а и р формирует сигнал И задания амплитуды тока.
Регулятор 11 тока - замкнутая система
автоматического регулирования тока выпрямителя, входящего в состав преобразователя 1 частоты, выполненная на основе пропорционально-интегрального регулятора.
Сумматор 9 представляет собой операционный усилитель с двумя резисторными входами, на которые поданы сигнал v обратной связи по частоте вращения
и выходной сигнал регулятора 6, пропорциональный величине скольжения двигателя. Выходной сигнал сумматора 9 пропорционален частоте потокосцепления ротора ш™. Коммутатор 13, осуществляющий подключение входа генератора 10 опорных сигналов либо к выходу сумматора 9 в области низких частот а)ц/, либо к дополнительному выходу блока 12 в области более высоких частот My в функции выходного сигнала
со ц/сумматора 9, содержит переключающий элемент с двумя входами и компаратор, на входе которого сравниваются по модулю некоторый постоянный сигнал уставки, определяющий границу области низких частот, и
выходной сигнал Шу сумматора 9.
Генератор 10 опорных сигналов является генератором парофазных гармонических сигналов, частота которых определяется значением входного сигнала.
Преобразователь 14 координат представляет собой векторный умножитель, на выходе которого присутствует сигнал И задающего вектора тока в неподвижной системе координат, полученный в результате
векторного умножения сигналов ТЪ .
Узел 17 коррекции частоты осуществляет импульсное преобразование сигнала а задания частоты тока в функции угла рассогласования между задающим вектором Н
тока двигателя и вектором И фактического тока двигателя. В качестве задающего генератора 18 может быть использована схема преобразователя аналог - код, в частности на основе генератора пилообразного напряжения.
Пересчетное кольцо 20 представляет собой реверсивную кольцевую схему распределения импульсных сигналов и осуществляет преобразование входного импульсного сигнала U в систему трехфазных импульсных сигналов ПК, порядок следования которых (Вперед или Назад) определяется значением входного единичного сигнала Н (направление).
Селектор 19, осуществляющий выбор режима управления пересчетного кольца 20 от узла 16 в области низких частот либо от задающего генератора 18 в области более высоких частот в зависимости от значения выходного сигнала а формирователя 15, содержит логическую переключающую схему, управляемую компаратором, на входах которого сравниваются сигнал а и сигнал уставки.
Устройство для управления асинхронным электродвигателем работает следующим образом.
Управление режимом работы асинхронного двигателя осуществляется управлением амплитуды и частоты тока статора. Задание амплитуды тока h формируется блоком 8 формирования задающих сигналов по двум составляющим тока. а - по выходному сигналу регулятора 6; Ip - по выходному сигналу задатчика 7 потока двигателя.
При изменении момента двигателя меняется составляющая а , а р , как правило, остается неизменной, что влечет за собой изменение выходного сигнала И на выходе блока 8, которое отрабатывается регулятором 11 тока и силовым управляемым выпрямителем преобразователя 1 частоты. Одновременно с изменением момента двигателя изменяется частота потокосцепле- ния ротора ш на выходе сумматора 9 и сигнал задания частоты потокосцепле- ния ротора на выходе формирователя 15 в блоке 12, которые поступают на входы коммутатора 13 блока 5. В зависимости от величины выходного сигнала 0)р сумматора 9, т. е. от величины частоты вращения, на выход крммутатора 13 передается либо сигнал 6)уС выхода сумматора 9 при малых скоростях, либо сигнал с выхода блока 12 при более высоких скоростях, каждый из которых в соответствующем диапазоне скорости определяет параметры (частоту и
фазовый сдвиг) выходного сигнала fy генератора 10, являющегося опорным вектором потокосцепления ротора в неподвижной системе координат.
Использование двух источников сигнала задания частоты опорного вектора потокосцепления ротора позволяет существенно расширить диапазон регулирования скорости двигателя и улучшить его динамические характеристики при одновременном снижении требований и упрощении датчика 4 потока и устройства измерения скорости в системе электропривода (при этом в отсутствие тахометрического устройства вместо
сигнала v возможно использование сигнала а задания частоты тока с выхода формирователя 15). Это обусловлено тем, что в области низких частот невозможна качественная работа общепринятых простых схем
датчика потока, а также тем, что именно в области более высоких частот для качественной работы привода повышаются требования к тахометрическому устройству,
Как уже упоминалось, блок 12 управления частотой в данном устройстве в части управления пересчетным кольцом 20 работает в двух режимах, выбираемых селектором 19 в зависимости от величины сигнала «| задания частоты тока на выходе формирователя 15: в области малых частот управление осуществляется узлом 16 ШИМ-управления, в области более высоких частот - узлом 17 коррекции частоты через задающий генератор 18.
Целесообразность двух режимов работы блока 12 обусловлена тем, что в зоне малых частот ШИМ-улравление обеспечивает необходимые быстродействие и точность отработки сигнала задающего
вектора тока двигателя, а в зоне больших частот, где из-за свойств силовой схемы автономного инвертора тока ШИМ-управле- ние принципиально невозможно, высокое качество регулирования обеспечивается импульсным управлением сигнала а задания частоты тока посредством узла 17 коррекции частоты,
На выходе преобразователя 14 координат блока 12, осуществляющего векторное
умножение задающих сигналов, Й21 и у , формируется векторный сигнал И1 задания тока двигателя в неподвижной системе координат, который является входным сигналом как узла 16 ШИМ-управления, так и
узла 17 коррекции частоты, т. е. используется качество задающего сигнала в обоих режимах работы блока 12.
В формирователе 15 задающих сигналов частоты (фиг. 2) посредством векторного
умножителя 21 вычисляется угловое рассогласование опорного сигнала Тувектора потокосцепления ротора, синтезированного в блоке 5 задающих сигналов, с фактическим сигналом jk вектора потокосцепления ро- тора, определенного датчиком 4 потока, которое на выходе ПИ-регулятора 22 преобразуется в сигнал &ы задания частоты потокосцепления ротора (для режима больших скоростей). Здесь же с помощью делителя 23 задающих сигналов а и lp , функционального преобразователя 24, реализующего функцию arctg, и конденсатора 25 вычисляется производная угла сдвига задающих сигналов тока и потока, которая в сумматоре 26 добавляется к сигналу а.
На выходе сумматора 26 получаем сигнал а задания частоты тока двигателя, подаваемого на вход узла 17 коррекции частоты (используется в зоне больших частот).
Узел 17 коррекции частоты совместно с задающим генератором 18 и пересчетным кольцом 20 воздействием импульсного сигнала на сигнал а задания частоты осуществляет быстродействующее согласование по фазе вектороных сигналов Ti фактическо/о тока двигателя с выхода датчика 2 тока и И задания тока двигателя с выхода преобразователя 14 координат на каждом такте работы инвертора, в том числе и при резких изменениях угла запаздывания инвертора тока при изменении режима работы двигателя.
В зоне больших частот на вход пересчетного кольца 20 селектор 19 подает им- пульсы задающего генератора 18, блокируя выходные сигналы узла 16 ШИМ-управле- ния. В этом режиме имеются поочередные переключения пересчетного кольца с частотой задающего генератора с однонаправ- ленным порядком чередования фаз, определяемым заданным направлением вращения двигателя.
В зоне малых частот селектор 19 блокирует импульсы задающего генератора 18 и подает на вход пересчетного кольца 20 выходные сигналы узла 16 ШИМ-управления: И - импульсный сигнал, определяющий частоту переключений, и Н (ВП - вперед, НЗ - назад) - потенциальный сигнал направле- ния, определяющий прямой либо обратный порядок переключений пересчетного кольца. Режим работы селектора 19 определяется величиной входного сигнала а задания частоты тока двигателя.
Узел 16 ШИМ-управления (фиг. 3) работает следующим образом.
Трехфазный сигнал И вектора задания тока двигателя через резисторы 27 и управляемые ключи 28 поступает на зход сумматора 29. На управляющие входы ключей 28 поступает выходной трехфазный сигнал ПК (А, В, С) пересчетного кольца 20. Поскольку в зоне малых частот выходной ток инвертора тока и, следовательно, фактический ток И двигателя определяется исключительно диаграммой включенных вентилей инвертора, которая в свою очередь однозначно определяется сигналом ПК, последний используется в качестве сигнала единичной амплитуды вектора Н - фактического тока двигателя. Вследствие этого, разделив выходной сигнал сумматора 29 на сигнал И1 задания амплитуды тока посредством делителя 30, на выходе последнего получаем сигнал, пропорциональный синусу угла рассогласования векторов И и И . Полученный сигнал угловой ошибки интегрируется интегратором 31 и сравнивается на входах двух компараторов 32 с разнополярными сигналами уставки +UU - UL При достижении выходного сигнала интегратора 31 величины той или иной уставки на выходе соответствующего коммутатора 32 и 33 формируется соответствующий сигнал напряжения переключения (ВП или НЗ) пересчетного кольца 20, а на выходе логической схемы 34 с помощью элемента 35 временной задержки - импульсный сигнал И, осуществляющий подключение пересчетного кольца. В результате в течение одного такта работы инвертора (1 /6 часть периода сигнала Ti ) осуществляются многократные переключения пересчетного кольца между двумя соседними (по фазе) состояниями так, что при каждом подключе- ии меняется знак угла сдвига векторов Н и И , чем обеспечивается режим ШИМ-управления.
Таким образом, в сравнении с известным решением устройство обеспечивает более качественное управление асинхронным двигателем в широком диапазоне регулирования скорости с повышенным быстродействием и улучшенными энергетическими показателями, в том числе в динамичных режимах разгона, торможения и реверса, путем сочетания двух режимов управления - в зоне малых и в зоне более высоких скоростей за счет введения дополнительных узлов и элементов в блок управления частотой и новых связей между ними, образующих два соответствующих канала управления, автоматически переключаемых в функции заданной частоты вращения.
Формула изобретения Устройство для управления асинхронным электродвигателем, содержащее преобразователь частоты на основе автономного инвертора тока с управляющими
входами тока и частоты и соответствующими выводами для подключения к сети переменного тока и к обмоткам асинхронного электродвигателя, датчики фазных токов и напряжений асинхронного электродвигателя, подключенные выходами к соответствующим входам датчика потока, блок формирования задающих сигналов, выполненный с регулятором частоты вращения, задатчиком потока, формирователем задания амплитуды тока, сумматором, и генератором опорных сигналов, регулятор тока и блок управления частотой с пятью входами, при этом задающий вход и вход обратной связи регулятора частоты вращения образуют соответствующие входы блока формиро- вания задающих сигналов, выход регулятора частоты вращения и выход за- датчика потока подключены к входам формирователя задания амплидуты тока, входы сумматора подключены соответственно к выходу и входу обратной связи регулятора частоты вращения, выход формирователя задания амплитуды тока, образующий выход блока формирования задающих сигналов, подключен к входу регулятора тока и к первому входу блока управления частотой, выходы эадатчика потока и регулятора частоты вращения образуют первую группу выходов, а выходы генератора опорных сигналов - вторую группу выходов блока формирования задающих сигналов, подключенные соответственно по второму и третьему входам блока управления частотой, четвертый и пятый входы которого подключены соответственно к выходу датчика потока и к выходу датчика фазных токов, выходы блока управления частотой и регулятора тока подключены к управляющим входам частоты и тока преобразователя частоты, отличающееся тем, что, с целью улучшения динамических и энергетических характеристик, блок формирования
задающих сигналов дополнительно снабжен двухвходовым управляемым коммутатором, а блок управления частотой снабжен дополнительным выходом и выполнен с
преобразователем координат, формирователем сигналов задания частоты, узлом ши- ротно-импульсного управления и с последовательно соединенными узлом коррекции частоты, задающим генератором, селектором и пересчетным кольцом, выход которого образует основной выход блока управления частотой, при этом первые и вто- рце входы преобразователя координат и формирователя сигналов задания частоты
соединены попарно между собой и образуют второй и третий входы блока управления частотой, четвертый вход которого образован третьим входом формирователя сигналов задания частоты, а пятый вход - первым
входом узла коррекции частоты, второй вход которого объединен с первым входом узла широтно-импульсного управления и подключен к выходу преобразователя координат, третий вход узла коррекции частоты
объединен с вторым входом селектора и подключен к первому выходу формирователя сигналов задания частоты, второй вход узла широтно-импульсного управления образует первый вход блока управления частотой, а третий вход указанного узла соединен с выходом пересчетного кольца, два выхода узла широтно-импульсного управления подключены соответственно к третьему и четвертому входам селектора, второй
выход формирователя сигналов задания частоты, образующий дополнительный выход блока управления частотой, подключен код- ному из входов управляемого коммутатора, другой вход которого и управляющий вход
соединены между собой и подключены к выходу сумматора, а выход управляемого коммутатора соединен с входом генератора опорных сигналов.
Фиг. I
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
| Устройство для регулирования скорости асинхронного двигателя | 1982 |
|
SU1064411A1 |
| Электропривод | 1978 |
|
SU797043A1 |
| Частотно-регулируемый асинхронный электропривод | 1982 |
|
SU1099373A1 |
| УСТРОЙСТВО ПРЯМОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ДВИГАТЕЛЯ НА ОСНОВЕ ТРЕХФАЗНОГО ТРЕХУРОВНЕВОГО АВТОНОМНОГО ИНВЕРТОРА NPC | 2023 |
|
RU2821420C1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| Задатчик активного тока дляАСиНХРОННОй МАшиНы | 1978 |
|
SU847479A1 |
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |
| Частотно-регулируемый асинхронный электропривод | 1985 |
|
SU1282302A1 |
| Частотно-регулируемый асинхронный электропривод для испытательного стенда двигателей | 1984 |
|
SU1203682A1 |
Изобретение относится к электротехнике, а именно к устройствам для управления частотно-регулируемыми асинхронными электроприводами на основе преобразователей частоты с автономными инверторами тока. Целью изобретения является улучшение динамических и энергетических характеристик. Указанная цель достигается тем, что блок 5 формирования задающих сигналов дополнительно снабжен двухвходовым коммутатором 13, а блок 12 управления частотой выполнен с преобразователем координат 14, формирователем 15 сигналов задания частоты, узлом 16 широтно-импульсного управления, узлом 17 коррекции частот, задающим генератором 18, селектором 19 и пересчетным кольцом 20. При этом обеспечивается сочетание двух режимов управления - в зоне малых и в зоне более высоких скоростей, переключаемых в функции заданной частоты вращения. 3 ил.
т Jf
fefcdr
П 28
| Частотно-регулируемый электропривод | 1986 |
|
SU1334347A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Kaimoto М | |||
| и др | |||
| Performance Improvement of Current Soure Suventer, .. | |||
| Induction Motor Drives | |||
| -IEEE Transaction of Industry Applications, 1982, IA-18, Ns 6, p | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ ОСТАНОВКИ ПОЕЗДОВ | 1915 |
|
SU703A1 |
