11 ;i
Изобретение относится к электротехнике и может быть использовано в различных областях промышленности и транспорта, в частности на контактном и автономном электрическом подвижном составе с асинхронными коротко замкнутыми двигателями и преобразователями частоты.
Цель изобретения - повьшение эффективности торможения и уменьшение массогабаритнь х показателей путем эффективного использования и уменьшения суммарной расчетной мощности оборудования.
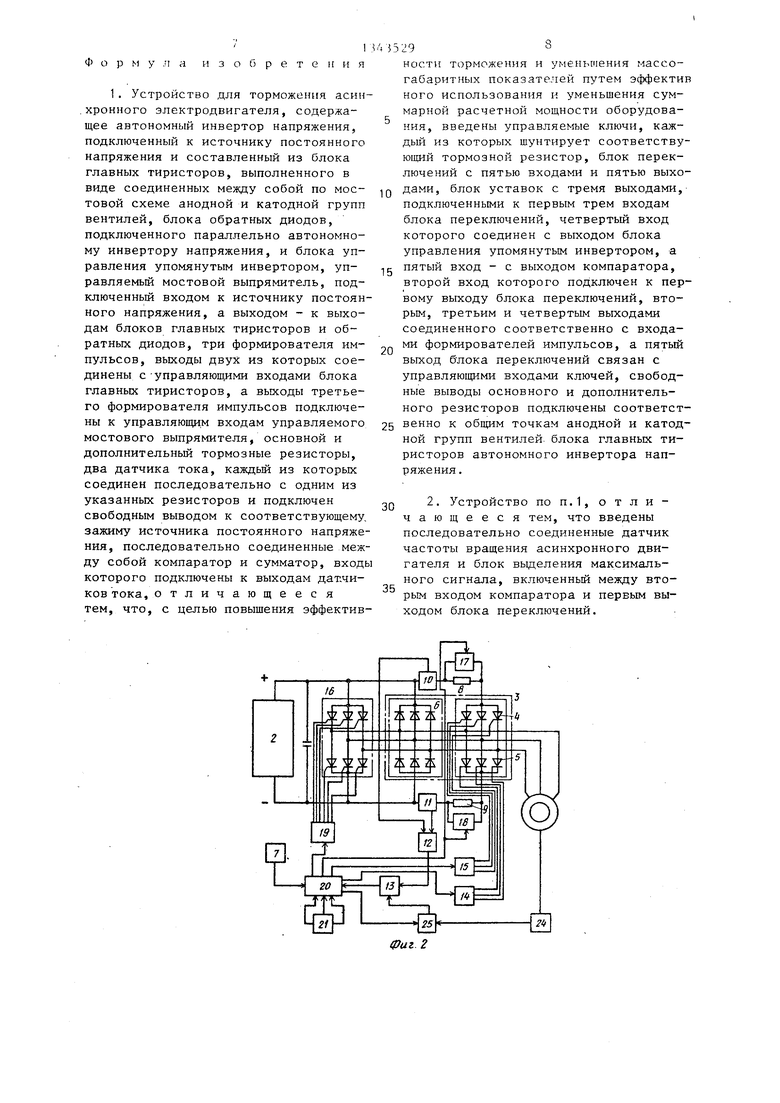
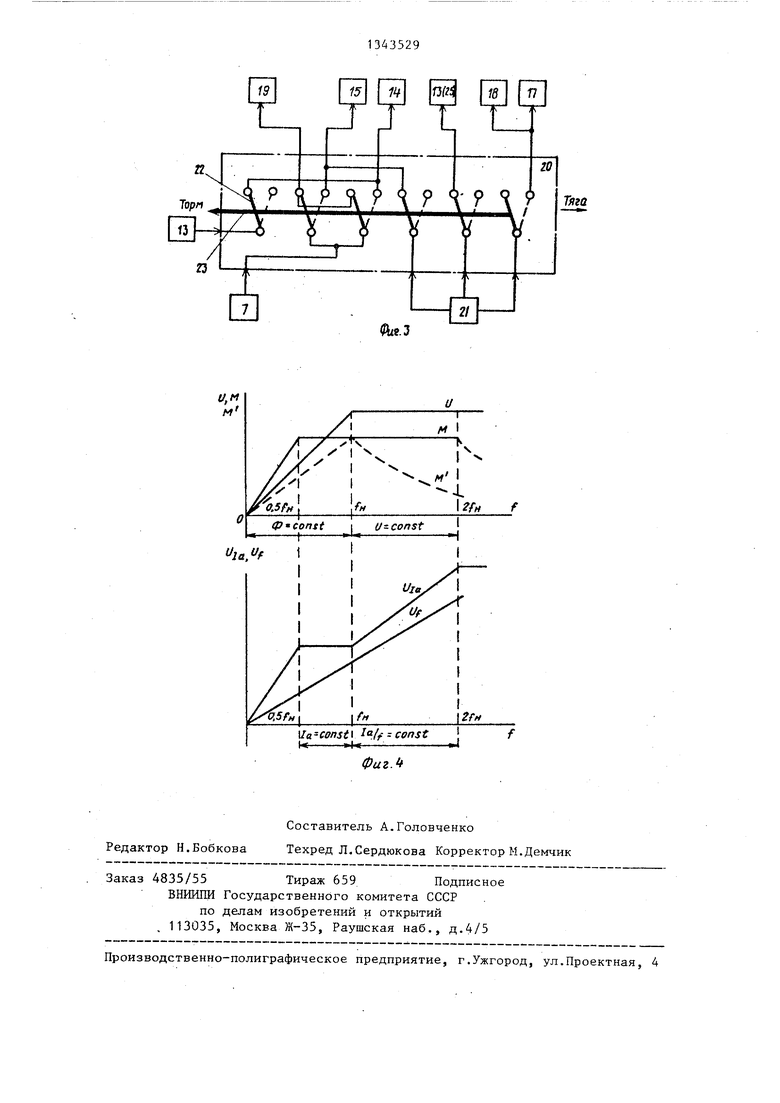
На фиг,1 представлена блок-схема устройства для торможения асинхронного электродвигателя; на фиг.2 - то же, вариант выполнения; на фиг.З- схема блока переключений; на фиг.4- диаграммы, поясняющие работу устройства.
Устройство содержит автономный инвертор 1 (фиГо1), подключенный к источнику 2 постоянного напряжения и составленный из соединенных между собой блока 3 главных тиристоров с анодной и катодной группами вентилей 4 и 5, блока 6 обратных диодов, блок
7управления инвертором, основной
8и дополнительный 9 тормозные резисторы, два датчика 10 и 11 тока, каждый из которых соединен последовательно с одним из указанных резисторов, с умматор 12, компаратор 13, два формирователя 14 и 15 импульсов, дополнительный управляемьв мостовой выпрямитель 16. В электропривод введены управляемые ключи 17 и 18, третий формирователь 19 импульсов, блок 20 переключений с пятью входами и пятью выходами, блок 21 уставок с тремя выходами, причем основной тормозной резистор 8 и первый датчик 10 тока включены между плюсом источника 2 постоянного напряжения и общей точкой анодной группы вентилей 4 блока 3 главных тиристоров, а дополнительный тормозной резистор 9 и второй датчик 11 тока - между минусом источника 2 постоянного напряжения и общей точкой катодной группы вентилей 5 блока 3 главных тиристоров, при этом каждый из резисторов 8 и 9 зашунтирован соответствующими управляемыми ключом 17 и 18, а вход блока
7 управления инвертором соединен с одним входом блока 20 переключений, второй вход последнего соединен с
выходом компара шрл Н, о.чним ( подключенного к iiepHOhjy пыхолу OJIOK.N 20 переключений, а друг им - к выходу сумматора 12, входы которого соединены с выходами соответствующих датчиков 10 и 11 тока, третий вход блока 20 переключений соединен с первым выходом, четвертый - с вторым, а
0 пятый - с третьим выходом блока 21 уставок, второй выход блока 20 переключений через третий формирователь 19 импульсов подключен к управляющим электродам вентилей дополнительного
5 управляемого мостового выпрямителя 16, третий выход блока 20 переключения соединен с управляющими входами управляющих ключей 17 и 18, четвертый выход через второй формирователь
0 14 импульсов подключен к управляющим электродам анодной группы вентилей 4, а пятый - через третий формирователь 15 импульсов - к управляющим электродам катодной группы 5 венти5 лей блока 3 главных тиристоров.
Устройство работает следующим образом.
В зависимости от режима работы электродвигателя блоком 20 переклю0 чений осуществляется перегруппировка и переключение связей между блоками системы управления. В тяговом режиме блок 20 подключает блок 7 управления инвертором через соответствующие
5 формировате ли 14 и 15 импульсов к управляющим электродам вентилей блока 3 главных тиристоров. Одновременно с блока 20 переключений посредством подачи в него сигнала от блока
0 21 уставок подается команда на включение управляемых ключей 17 и 18. Тем самым тормозные резисторы 8 и 9 шунтируются и не участвуют в работе. Предлагаемый электропривод предус5 матривает увеличение допустимой мощности режима тя ги за счет параллельной синфазной работы бока 3 главных тиристоров и дополнительного управляемого мостового выпрямителя 16. С
o этом целью блоком переключений вентилей моста к блоку 7 управления инвертором осуществляется подключение выхода последнего к управляющим электродам дополнительного управляеg могр мостового выпрямителя 16. Для перехода в режим резисторого торможения блок 20 переключений подключает блок 7 управления инвертором к управляющим электродам вентилей дополнительного управляемого мостового выпрямителя 16, В этом случае мостовой выпрямитель 16 берет на себя функции частотного регулирования асинхронной машины вместо блока главных тиристоров. Анодная группа вентилей 4 через формирователь 14 импульсов переводится в режим работы диодами посредство подачи из блока 21 уставок сигнала в блок 20 переключений, с выхода которого этот сигнал в режиме торможения поступает на вход формирователя 14 импульсов. Одновременно блок 20 переключений отключает выход блока 21 уставок от управляющих входов управляемых ключей 17 и 18, что вызывает их размыкание и включение в силовую схему резисторов 8 и 9. При этом в сумматоре 12 формируется сигнал, пропорциональный активному току асинхронной машины U . Общий активный ток машины определяется суммой токов, протекающих одновременно в цепи резистора 8 (сигнал датчика 10 тока ит ) и в цепи резистора 9
(сигнал Сдатчика 11 тока Q, ), т.е.
°г И и + и, .
а c(, °г На компараторе 13 происходит
сравнение сигнала обратн ой связи по
величине активного тока U, с сигна QЛОМ задания U, , приходящего с
блока 21 уставок и подключенного к входу компаратора 13 блоком 20 переключений. При этом, если выполняется неравенство Uj U. , то посредством подключения вьмода компаратора 13 блоком 20 переключений к входу формирователя 15 импульсов последний подает отпирающие импульсы на управляющие электроды тиристоров катодной группы вентилей 5, что приводит к отпиранию тиристоров. Длительность импульсов управления определяется временем, в течение которого активный ток двигателя достигает заданной величины. При равенстве величин сопротивлений основного Rg и дополнительного Rg тормозных резисторов эквивалентная величина сопротивления тормозного резистора R:J. изменяется от 0,5 Rg до Rg, что позволяет путем повторно-кратковременного подключения дополнительного резистора параллельно основному поддерживать заданный активный ток двигателя.
При двухзонном способе управления двигателя формируется зависимость
5
0
5
0
5
0
5
0
5
и(f) блоком 7 управления инвертором (фиг.4), где и - напряжение фазы асинхронной машины, f - частота вращения асинхронного двигателя. При этом от О до номинального значения частоты f, магнитный поток машины
п
ПОСТОЯННЫЙ -const, а при Ец U const.
При постоянно включенном резисторе 8 и отсутствии регулирования резистором 9 (он не работает) характеристика тормозного момента М в функции частоты f имеет вид зависимости м (f) (фиг.4).
Для расширения области торможения с максимально возможными значениями тормозного момента в области низких частот в электроприводе, в качестве уставки по активному току U, выioxoo
бирают значение, соответствующее активному току асинхронного двигателя при номинальной частоте f. При вслед за снижением напряжения J по сравнению с точкой номинального режима должен уменьшиться и активный ток IQ . Тогда LTj и. -, , что приводит к открыванию вентилей 5 катодной группы, а это приводит к уменьшению R- , и увеличению тока машины. При Uj Uiojqe катодная группа вентилей 5 закрывается, величина сопротивления в тормозной цепи становится равной R , ток 1дгначинает снижаться и т.д. Процесс подрегулирования активного тока IQ за счет подключения резистора 9 может продолжаться до значения ,5f, так как при этой частоте напряжение асинхронной машины уменьшилось в два раза и при R 05R.
1к6 R это соответствует режиму постоянно
включенных вентилей 5. Характеристика тормозного момента M(f), которая формируется системой управления электропривода (фиг.1), на участке от О до f будет иметь соответствующий вид (фиг.4).
В рассматриваемом режиме работы электропривода почти вся тормозная мощность замыкается между фазами асинхронной машины через блок 6 обратных диодов и блок 3 главных тиристоров и рассеивается в виде тепла в тормозных резисторах 8 и 9. Дополнительный мостовой выпрямитель 16 используется в этом режиме для замыкания необходимого для самовозбуждения асинхронной мапшны реактивного тока. Применяемый управляемый место6
гателя остается постоянным за счет регулирования катодной группы вентилей 5 в диапазоне от 0,5f до f . В этой же зоне остается постоянный момент М, так как поток асинхронного двигателя постоянный. В зоне от „ до 2f и. Uj, поэтому на компаратор 13 поступает в качестве заданной величины тормозного тока сигнал, пропорциональный частоте вращения U,, При и. и, компаратор 13 включает группу вентилей 5, уменьшая тем самым эквивалентное тормозное сопротивление схемы R . При этом увеличивается ток асинхронного двигате51343529
вой выпрямитель 16 рассчитывается по тормозному режиму, т.е. по величине реактивного тока, который существенно меньше полного тока асинхронной машины. Следовательно, расчетная мощность добавочного мостового выпрямителя 16 существенно меньше расчетной мощности блока 3 главных тиристоров, через который замыкается ак- Q тивный ток.
Блок 20 переключений выполнен на переключателях 22, связанных между собой общей тягой 23 (фиг.З), каждый из которых в зависимости от режима д работы занимает одно из двух положений.
В устройство для торможения асинхронным электродвигателем могут быть введены последовательно соединенные между собой датчик 24 частоты вращения асинхронного двигателя и блок 25 выделения максимального выходного сигнала (фиг.2), включенный между первым выходом блока 20 переключений и вторым входом компаратора 13.
Работа устройства в тяговом режиме по этому варианту исполнения ана- -К„ R логична работе устройства.но возможный активный тормозной ток
В генераторном режиме работы асин- Q по условиям регулирования, 1, - хронного двигателя блоком 20 переклю- номинальный ток асинхронного двига- чений собирается подобная структур- теля, соответствующий номинальному ная схема системы авторегулирования. Однако сигнал уставки по активному
ля. Когда Up
и
вентили 5 отклю20
чаются, а затем йроцесс повторяется. Таким образом, достигается рост тормозного активного тока асинхронного двигателя прямо пропорционально ее частоте вращения f. В зоне от f до
вращения .i.. ± о.1 . при постоянстве напряжения источ ника 12 постоянного напряжения торВ точке
25 мозной момент М постоянен,
чатотного диапазона 2f группа венн
тилей 5 постоянно включена,
9
т -2Т
а MQKCон
- максимальнапряжению и„ , номинальной частоте вращения f и номинальному тормозному моменту Мц. При этом расчетная
заданному току Uj , приходящий из блока 21 уставок (фиг.З) приходит на элемент выделения максимального сигнала, куда так же,приходит сигнал с датчика 24 частоты вращения U|. Поэтому в качестве уставки на компаратор 13 поступает больший из двух
сигналов: UT , ,
J-c,3o3
частоте вращения f
Uf (фиг.4). При
асинхронного дви- гателя меньшей РШИ равной номинальной и, , Uf, а при большей, чем
f
номинальная - и, U. :1«j ia -1
Следовательно, на компаратор 13 приходит сигнал Uj при частоте, меньшей номинальной, и U., - выше номинальной. Одновременно на компаратор 13 приходит сигнал U. , пропорциональный активному току асинхронного двигателя с датчиков 10 и 11 и сумматора 12. В диапазоне от О до f.,
на компараторе 13 сравниваются два сигнала U и U, а в диапазоне f - 2f сравниваются сигналы Q и и . При этом до номинальной частоты f, активный ток Т, асинхронного дви6
гателя остается постоянным за счет регулирования катодной группы вентилей 5 в диапазоне от 0,5f до f . В этой же зоне остается постоянный момент М, так как поток асинхронного двигателя постоянный. В зоне от „ до 2f и. Uj, поэтому на компаратор 13 поступает в качестве заданной величины тормозного тока сигнал, пропорциональный частоте вращения U,, При и. и, компаратор 13 включает группу вентилей 5, уменьшая тем самым эквивалентное тормозное сопротивление схемы R . При этом увеличивается ток асинхронного двигате9
-К„ R но возможный активный тормозной ток
ля. Когда Up
и
вентили 5 отклю0
чаются, а затем йроцесс повторяется. Таким образом, достигается рост тормозного активного тока асинхронного двигателя прямо пропорционально ее частоте вращения f. В зоне от f до
вращения .i.. ± о.1 . при постоянстве напряжения источника 12 постоянного напряжения торВ точке
5 мозной момент М постоянен,
чатотного диапазона 2f группа венн
тилей 5 постоянно включена,
9
т -2Т
а MQKCон
- максимальQ по условиям регулирования, 1, - номинальный ток асинхронного двига- теля, соответствующий номинальному
Резистор 8 в диапазоне f - 2f тает с предельной мощностью Р
напряжению и„ , номинальной частоте вращения f и номинальному тормозному моменту Мц. При этом расчетная
ЕЛ
мощность тормозных резисторов 8 и 9
Р- I К„ - I К„ и определяет- То он 8 о,н а i М
ся номинальным значением тока. 1а
рабо 4. :J. J. V- j.j.j.fji, 1 лхухцлv-rV- t. J-.-л 3.
резистор 9 работает с этим значением Р только при f 2f . Во всех остальных точках тормозной резистор 9 работает при пониженной мощности , а в точке/ / отключен совсем.
Изобретение позволяет уменьшить износ механических тормозов, повысить производительность транспортных средств за счет расширения диапазона торможения и увеличения мощности вигательного режима, уменьшить габариты за счет снижения суммарной установленной мощности, более эффективного использования оборудования, улучшения токораспределения при полной симметрии загрузки оборудования, уменьшения пульсаций тока.
Формула изобретения
1. Устройство для торможения аснн .кронного электродвигателя, содержащее автономный инвертор напряжения, подключенный к источнику постоянного напряжения и составленный из блока главных тиристоров, выполненного в виде соединенных между собой по мостовой схеме анодной и катодной групп вентилей, блока обратных диодов, подключенного параллельно автономному инвертору напряжения, и блока управления упомянутым инвертором, управляемый мостовой выпрямитель, подключенный входом к источнику постоянного напряжения, а выходом - к выходам блоков главных тиристоров и обратных диодов, три формирователя импульсов, выходы двух из которых соединены с -управляющими входами блока главных тиристоров, а выходы третьего формирователя импульсов подключены к управляющим входам управляемого мостового выпрямителя, основной и дополнительный тормозные резисторы, два датчика тока, каждьм из которьк соединен последовательно с одним из указанных резисторов и подключен свободным выводом к соответствующему зажиму источника постоянного напряжения, последовательно соединенные между собой компаратор и сумматор, вход которого подключены к выходам дат.чи- ков тока, отличающееся тем, что, с целью повышения эффектив
55298
ностн торможения и уменыпения массо- габаритных показателей путем эффектив ного использования и уменьшения суммарной расчетной мощности оборудования, введены управляемые ключи, каждый из которых шунтирует соответствующий тормозной резистор, блок переключений с пятью входами и пятью выходами, блок уставок с тремя выходами, подключенными к первым трем входам блока переключений, четвертый вход которого соединен с выходом блока управления упомянутым инвертором, а пятый вход - с выходом компаратора, второй вход которого подключен к первому выходу блока переключений, вторым, третьим и четвертым выходами соединенного соответственно с входами формирователей импульсов, а пятый выход блока переключений связан с управляющими входами ключей, свободные выводы основного и дополнительного резисторов подключены соответст5 венно к общим точкам анодной и катодной групп вентилей блока главных тиристоров автономного инвертора напряжения .
5
30
35
2. Устройство по П.1, отличающееся тем, что введены последовательно соединенные датчик частоты вращения асинхронного двигателя и блок выделения максимального сигнала, включенный между вторым входом компаратора и первым выходом блока переключений.
Редактор Н.Бобкова
Составитель А.Головченко
Техред Л.Сердюкова Корректор М.Демчик
Заказ 4835/55 Тираж 659 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий , 113035, Москва Ж-35, Раушская наб,, д.4/5
™ - -- -- - - ™ ----------.------. ««i-i..™,™.,,«,.„,,.„.,.,,„,.„, ,
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Фиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для торможения асинхронного электродвигателя | 1985 |
|
SU1343530A1 |
| Частотно-регулируемый электропривод с блоком торможения | 1984 |
|
SU1229937A1 |
| Частотно-регулируемый электропривод с блоком торможения | 1982 |
|
SU1056411A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1325653A1 |
| Устройство для управления асинхронным электродвигателем с фазным ротором | 1984 |
|
SU1279036A1 |
| Устройство для торможения частотно-регулируемого асинхронного электродвигателя | 1982 |
|
SU1241391A1 |
| Устройство для торможения частотно-регулируемого асинхронного электродвигателя | 1985 |
|
SU1339850A1 |
| Способ торможения асинхронного электродвигателя | 1980 |
|
SU955466A1 |
| Тяговый электропривод | 1985 |
|
SU1253852A1 |
| Устройство для торможения трехфазного асинхронного электродвигателя | 1981 |
|
SU974531A1 |
Изобретение относится к электротехнике и может быть использовано в различных областях промьппленности, х частности на контактном и автономном электрическом подвижном составе. Целью изобретения является повышение , эффективности торможения и уменьшение массогабаритньш показателей путем эффективного использования и уменьшения суммарной расчетной мощности оборудования. Указанная цель достигается введением в устройство торможения асинхронного двигателя управляемых ключей 17 и 18, блока 20 переключений, блока 21 уставок и включением датчика тока 10 и основного тормозного резистора 8 между общим выводом анодной группы вентилей 4 блока 3 главных тиристоров и плюсовым зажимом источника 2 постоянг- ного напряжения, а датчика тока 11 и дополнительного тормозного:резистора 9 - между отрицательным зажимом источника 2 и общим выводом катодной группы вентилей 5 блока 3. Устройство позволяет осуществлять реостатное торможение с предельным значением тормозного момента в широком диапазоне вплоть до двойной номинальной частоты вращения. 1 з.п. ф-лы, 4 ил. § (Л С ibut. L
| Датчик смещения | 1990 |
|
SU1763871A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Частотно-регулируемый электропривод с блоком торможения | 1982 |
|
SU1056411A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
