Изобретение относится к электротехнике и может быть использовано в различных областях промышленности и в транспорте, в частности, на контактном и автономном электрическом подвижном составе с асинхронным ко- роткозамкнутым двигателем.
Цель изобретения - повышение эффективности торможения н уменьшение массогабаритных показателей путем эффективного использования и уменьшения суммарной расчетной мощности имеющегося оборудования.
На фиг.1 приведена блок-схема устройства для торможения асинхронного электровигателя; на фиг,2 - схема блока переключений, , Устройство содержит автономный инвертор 1 напряжения, подключенный к источнику 2 постоянного напряжения и составленньй из блока 3 главных тиристоров, выполненного в виде соединенных между собой по мостовой схеме групп анодных и катодных вентилей 4 и 5, блока 6 обратных диодов, параллельно подключенногр к блоку 3 главных тиристоров. Автономный инвертор включает в себя блок 7
блок 21 уставок с двумя выходами подключенными к первым двум вход блока 20 переключений, третий д g чик 22 тока и датчик 23 напряже включенные в цепь питания асинхр ного двигателя, второй сумматор дифференциальный усилитель 25, измерения 26 фазового угла сдви
10 генератор 27 пилообразного напря ния. Третий вход блока 20 перекл ний соединен с выходом блока 7 у ления и через генератор 27 пило ного напряжения - с первым вход
15 компаратора 17. Четвертый вход б 20 переключений подключен к выхо второго сумматора 24, эдин вход рого соединен с выходом дифферен ального усилителя 25, .1 другой в
20 сумматора 24 подключен к выходу ка 26 измерения фазово: о сдвига вход блока- измерения фазового си ла соединен с выходом датчика 22 тока, а другой вход - г выходом
25 чика 23 напряжений. Первый выход ка 20 переключений через компара 17 соединен с входами формирова 9 и 10 импульсов, второй вход э блока - с входом формирователя
управления. К входу автономного инвер-30 импульсов. Третий выход блока
тора подключены входы управляемого выпрямителя 8, выходы которого соединены с выходами блока 3 главных тиристоров и блока 6 обратных диодов . Управляющие входы блоков 3 главных.тиристоров подключены к выходам формирователей 9 и 10 импульсов, а выходы формирователя 11 импульсов соединены с управляющими входами управляемого выпрямителя 8. Устройство содержит также основной тормозной резистор 12, последовательно с которым соединен датчик 13 тока, дополнительный резистор 14 с датчиком 15 тока. Датчик 13 тока и тормозной резистор 12 включены между плюсовым зажимом источника 2 постоянного напряжения и общим выводом анодной группы вентилей 4. Датчик 15 тока и резистор 14 включены между отрицательным зажимом источника 2 постоянного напряжения и общим выводом катодной группы вентилей 5. Выходы Датчиков 13 и 15 тока подключены к входам сумматора 16. Устройство содержит также компаратор 17 и в него введены управляемые ключи 18 и 19, блок 20 переключений с четырьмя входами и четырьмя выходами.
блок 21 уставок с двумя выходами, подключенными к первым двум входам блока 20 переключений, третий дат- чик 22 тока и датчик 23 напряжения, включенные в цепь питания асинхронного двигателя, второй сумматор 24, дифференциальный усилитель 25, блок измерения 26 фазового угла сдвига и
генератор 27 пилообразного напряжения. Третий вход блока 20 переключений соединен с выходом блока 7 управления и через генератор 27 пилообразного напряжения - с первым входом
компаратора 17. Четвертый вход блока 20 переключений подключен к выходу второго сумматора 24, эдин вход которого соединен с выходом дифференциального усилителя 25, .1 другой вход
сумматора 24 подключен к выходу блока 26 измерения фазово: о сдвига. Один вход блока- измерения фазового сигнала соединен с выходом датчика 22 тока, а другой вход - г выходом датчика 23 напряжений. Первый выход бло ка 20 переключений через компаратор 17 соединен с входами формирователей 9 и 10 импульсов, второй вход этого блока - с входом формирователя 11
20
переключении подключен к первому входу дифференциального усилителя 25, второй вход которого связан с выходом первого сумматора 16, а четвертый
выход блока переключений соединен с управляющими входами ключей 18 и 19. Ключ 18 шунтирует основной тормозной резистор 12, а ключ 19 - допол - нительный тормозной резистор 14.
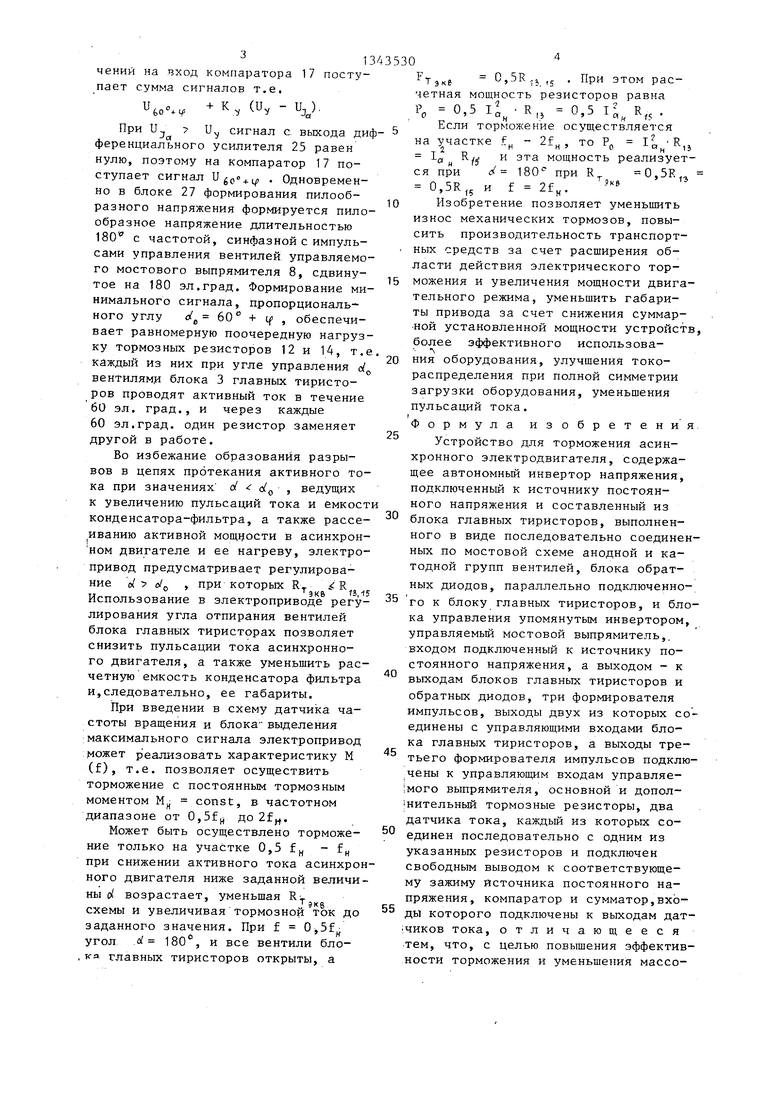
Блок 20 переключений выполнен на переключателях 28 (фиг,2), связанных между собой общей тягой 29,
Устройство работает следуюш 1м образом.
,На блок 26 измерения фазового угла сдвига приходят два сигнала с датчиков тока 22 и напряжения фазы 23. С выхода блока 26 на вход сумматора 24 поступает сигнал ,
пропорциональный 0/ где
1/ - угол сдвига между напряжением
и током фазы асинхронного двигателя.
Дифференциальный усилитель 25 работает с коэффициентом усиления К
разности сигналов: суммарного активного тока асинхронного двигателя Uy и сигнала задания тока U,. С выхода сумматора 24 через блок 20 переключений на вход компаратора 17 поступает сумма сигналов т.е.
и
40
При и т - а
f
7
К (и., - U-,).
- - а
и.
,v сигнал
с. выхода ди
ференциального усилителя 25 равен нулю, поэтому на компаратор 17 поступает сигнал . Одновременно в блоке 27 формирования пилообразного напряжения формируется пилообразное напряжение длительностью ISO с частотой, синфазной с импульсами управления вентилей управляемого мостового выпрямителя 8, сдвинутое на 180 эл.град. Формирование минимального сигнала, пропорционального углу of j, 60 + 1 , обеспечивает равномерную поочередную нагрузку тормозных резисторов 12 и 14, т. каждый из них при угле управления о1 вентилями блока 3 главных тиристоров проводят активный ток в течение 60 эл. град., и через каждые 60 эл.град. один резистор заменяет другой в работе.
Во избежание образования разрывов в цепях протекания активного тока при значениях с с(, , ведущих к увеличению пульсаций тока и емкос конденсатора-фильтра, а также рассеиванию активной мощности в асинхрон ном двигателе и ее нагреву, электропривод предусматривает регулирование о/ й/о , при которых . г R
Э К В
Использование в электроприводе регулирования угла отпирания вентилей блока главных тиристорах позволяет снизить пульсации тока асинхронного двигателя, а также уменьшить расчетную емкость конденсатора фильтра и,следовательно, ее габариты.
При введении в схему датчика частоты вращения и блока вьщеления максимального сигнала электропривод может реализовать характеристику М (f), т.е. позволяет осуществить торможение с постоянным тормозным моментом М const, в частотном диапазоне от 0,5f| до 2fj,
Может быть осуществлено торможение только на участке 0,5 f н при снижении активного тока асинхроного двигателя ниже заданной величины d возрастает, уменьшая R- схемы и увеличивая тормозной ток до заданного значения. При f угол о 180°, и все вентили блока главных тиристоров открыты, а
Тэкб П, 15
При
четная мощность резисторов Рр 0,5 1 R
этом рас- равна R.
0,3 1 R,, 0,5 1 ..,, Если тop южeниe осуществляется
5
0
5
0
5
0
5
0
5
на участке 1. R.
- 2f,
то Р„ I
R.
-Н --И 0 15
L, iv И эта мощность реализуется при й( ISO при R 0,5Р,,, 0,5R,, и f 2f,.
Изобретение позволяет уменьшить износ механических тормозов, повысить производительность транспортных средств за счет расширения области действия электрического торможения и увеличения мощности двигательного режима, уменьшить габариты привода за счет снижения суммарной установленной мощности устройств, более эффективного использования оборудования, улучшения токо- распределения при полной симметрии загрузки оборудования, уменьшения пульсаций тока. Формула изобретения
Устройство для торможения асинхронного электродвигателя, содержащее автономный инвертор напряжения, подключенный к источнику постоянного напряжения и составленный из блока главных тиристоров, выполненного в виде последовательно соединенных по мостовой схеме анодной и катодной групп вентилей, блока обратных диодов, параллельно подключенного к блоку главных тиристоров, и блока управления упомянутым инвертором, управляемый мостовой выпрямитель,, входом подключенный к источнику постоянного напряжения, а выходом - к выходам блоков главных тиристоров и обратных диодов, три формирователя импульсов, выходы двух из которых соединены с управляющими входами блока главных тиристоров, а выходы третьего формирователя импУльсов подключены к управляюшим входам управляе- JMoro выпрямителя, основной и допол- нительный тормозные резисторы, два датчика тока, каждьй из которых соединен последовательно с одним из указанных резисторов и подключен свободным выводом к соответствующему зажиму источника постоянного напряжения, компаратор и сумматор,входы которого подключены к выходам дат- 1чиков тока, отличающееся тем, что, с целью повышения эффективности торможения и уменьшения массогабаритных показателен путем эф(11ек- тивного использования и уменьшения суммарной расчетной )0 цности имеющегося обо1)удования, введены управляемые ключи, третий датчик тока и датчик напряжения, включенные в цепь питания асинхронного двигателя, второй сумматор, дифференциальный усилитель, блок измерения фазового угла сдвига, генератор пилообразного напряжения, блок переключений с четырьмя входами и четырьмя выходами, блок уставок с двумя входами, подключенными к первым двум входам блока переключений, третий вход которого соединен с выходом блока управления упомянутым инвертором и через генератор пилообразного напряжения с одним входом компаратора, а четвертый .вход блока переключений подключен к выходу второго сумматора, один вход которого соединен с выходо дифференциального усилителя, а дру
U)
1 ОЙ HKli.U - с lil.iy.njjtoi f :|l lC. l ИЧГ-УЧК.ЧШИ
фазогпич уг.п.ч с;,цнига, лиа нхпдл кспо- рого подключены (:о1Лчиетстнонм11 к иы- ходам третьего датчика тока л датчика напряже)ия, перр1,м выход блока переключений через компаратор соединен с входами первых двух формирователей импульсов, второй выход - с .входом третьего формирователя импульсов, третий выход блока переключений подключен к первому входу дифференциального усилителя, вторым входом соединенного с выходом первого сумматора, а четвертый выход блока переключений связан с управляющими входами ключей, из которых шунтирует один из резисторов, свободные выводы основного и дополнительного тормозного резисторов подключены соответственно к общим точкам анодной и ка- тодноу групп вентилей блока главных тиристоров автономного инвертора напряжения .
Тяго
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для торможения асинхронного электродвигателя | 1985 |
|
SU1343529A1 |
| Частотно-регулируемый электропривод с блоком торможения | 1984 |
|
SU1229937A1 |
| Частотно-регулируемый электропривод с блоком торможения | 1982 |
|
SU1056411A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2361356C1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1325653A1 |
| Устройство для регулирования скорости трехфазного асинхронного двигателя с фазным ротором | 1982 |
|
SU1116515A2 |
| Устройство для торможения трехфазного асинхронного электродвигателя | 1981 |
|
SU974531A1 |
| Регулятор частоты вращения асинхронного двигателя | 1974 |
|
SU532166A1 |
| Устройство для компенсации реактивной мощности в электрических сетях | 1986 |
|
SU1390702A1 |
| Устройство для торможения частотно-регулируемого асинхронного электродвигателя | 1985 |
|
SU1339850A1 |
Изобретение относится к электротехнике и может быть использовано в различных областях промьгашен- ности, в частности на контактном и автономном электрическом подвижном составе. Целью изобретения является повьшение эффективности торможения и уменьшение массогабаритных показателей путем эффективного использования и уменьшения суммарной расчетной мощности оборудования. Указанная цель достигается введением в устройство для торможения асинхронного двигателя управляемых ключей 18 и 19, блока 20 переключений, блока 21 уставок, датчика 22 тока, датчи а 23 напряжения,- блока 26 угла фазового сдвига, сумматора 24, дифференциального усилителя 25, генератора 27 пи-, лообразного напряжения. Устройство позволяет осуществить реостатное торможение с предельным значением тормозного момента в широком диапазоне вплоть до двойной номинальной частоты вращения. 2 ил. (Л со 4 00 СП 00
Редактор Н.Бобкова
Составитель А.Головченко
Техред Л.Сердюкова Корректор М.Шароши
Заказ 4835/55 Тираж 659Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва Ж-35, Раушская наб., д.4./5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
| Датчик смещения | 1990 |
|
SU1763871A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Частотно-регулируемый электропривод с блоком торможения | 1982 |
|
SU1056411A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
