Изобретение относится к автоматике и может быть использовано в системах автоматического управления и контроля подачи воздуха.
Цель изобретения - повышение достоверности контроля за счет идентификации отказавшего узла регулятора.
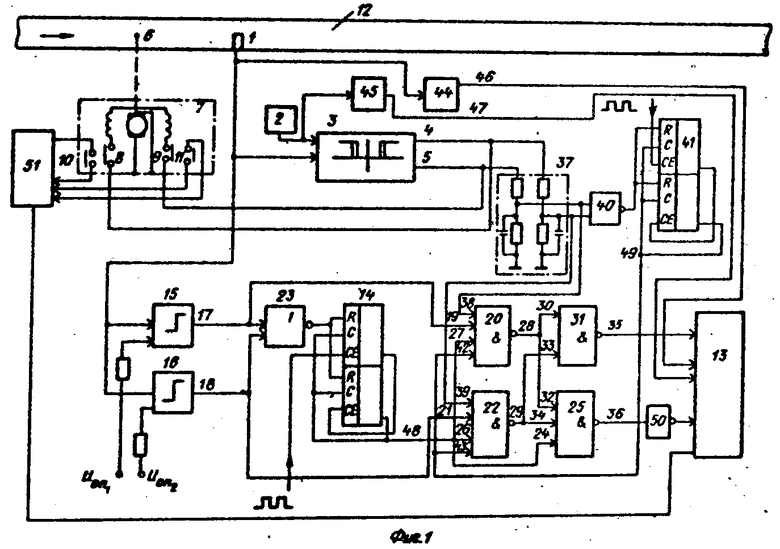
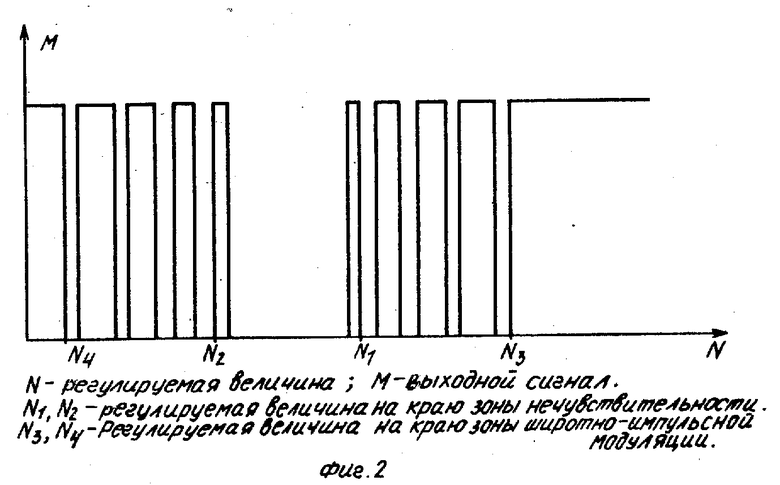
На фиг. 1 изображена схема предлагаемого устройства; на фиг. 2 - статическая характеристика блока управления приводом.
Регулятор содержит датчик 1 параметра, задатчик 2 параметра, блок 3 управления приводом с выходами 4 и 5, исполнительный механизм 6, привод 7, механически связанный с датчиками 8 - 11 конечных положений, трубопровод 12, подводящий воздух к гермокабине, блок 13 индикации, блок 14 контроля цикла работы регулятора, компараторы 15 и 16 с выходами 17 и 18, первый вход 19 второго элемента И 20, первый вход 21 четвертого элемента И 22, второй элемент ИЛИ 23, второй вход 24 третьего цемента И 25, второй вход 26 элемента И 22, второй вход 27 элемента И 20, выход 28 элемента И 20, выход 29 элемента И 22, первый вход 30 первого элемента И 31, первый вход 32 элемента И 25, второй вход 33 элемента И 31, третий вход 34 элемента И 25, выход 35 элемента И 31, выход 36 элемента И 25, блок 37 согласования уровней напряжения, третий вход 38 элемента И 20, третий вход 39 элемента И 22, первый элемент ИЛИ 40, блок 41 контроля длительности импульсов, четвертый вход 42 элемента И 20, четвертый вход 43 элемента И 22, первый 44 и второй 45 двухпороговые компараторы с выходами соответственно 46 и 47, выход 48 блока 14 контроля цикла работы регулятора, выход 49 блока 41 контроля длительности импульсов, элемент НЕ 50, блок 51 определения отказа.
Трехпозиционный регулятор работает следующим образом. Сигнал датчика 1 поступает на вход блока, где сигнал сравнивается с заданным значением регулируемой величины, установленной на задатчике 2 параметра, и вырабатывается закон регулирования. Статическая характеристика блока 3 с широтно-импульсной модуляцией выходного сигнала приведена на фиг. 2. Если регулируемая величина, измеряемая датчиком 1, больше заданного значения по задатчику 2 (точкам N1 на фиг. 2), импульсный сигнал с выхода 4 блока 3 поступает на привод 7, который закрывает исполнительный механизм 6, уменьшая подачу воздуха по трубопроводу 12. Если регулируемая величина меньше заданного значения (точка N2 на фиг. 2), с выхода 5 поступает импульсный сигнал на привод 7 на открытие исполнительного механизма 6. Одновременно с подачей сигналов на привод 7 с выхода 4 или 5 эти сигналы через блок 37 согласования уровней напряжения и элемент ИЛИ 40, поступают на запрещающий вход блока 41. При подаче "1" на вход элемента ИЛИ 40 на вход блока 41 поступает "0". Блок 41 начинает отсчет времени. Если отклонение регулируемой величины незначительно (от N2 до N4 на фиг. 2), импульсная работа блока 3 продолжается, и блок 41, настроенный на время t1 больше самого широкого импульса, сбрасывает вычисленное время на "0", когда на его вход поступает "1", т.е. во время паузы. Если отклонение регулируемой величины увеличилось, например, больше N4, с выхода 4 выдается постоянный сигнал "1". Блок 41 отсчитывает заданное время t1 и выдает на выходе 49 сигнал N1. Сигнал датчика 1 одновременно поступает на компараторы 15 и 16. При увеличении регулируемой величины больше N3 компаратор 15 через элемент ИЛИ 23 подает "0" на вход блока 14, который начинает отсчет времени t2. По окончании отсчета t2 на выходе 48 появляется сигнал "1". Время t2 выбрано большим времени отработки объектом регулируемой величины и большим времени зоны импульсной работы t1.
Если регулируемая величина за время, меньшее t2, успевает установиться в пределах от N1 до N2, на выходах 17 и 18 оказывается сигнал "0", на входе блока 14 - "1". Блок 14 сбрасывает вычисленное значение. На выходе 48 - сигнал "0".
Таким образом, когда регулируемая величина превышает N3 и устойчиво поддерживается в этом положении больше времени t2, на выходах элемента И 20 собираются сигналы: Вход 38 "1" Вход 19 "1" Вход 27 "1" Вход 42 "1"
Элемент И 20 срабатывает, на его выходе 28 появляется сигнал "0". При этом на входе 29 элемента И 22 имеется сигнал "1", а на его входах - сигналы: Вход 39 "0" Вход 21 "0" Вход 26 "1" Вход 43 "1"
На входах элемента И 31 сигналы: Вход 30 "0" Вход 32 "1" а на выходе - сигнал "1" - отказ трехпозиционного регулятора.
На входах элемента И 25 - сигналы: Вход 32 "0" Вход 34 "1" Вход 24 "1" на выходе 36 - сигнал "1", а на выходе элемента НЕ 50 - "0", который говорит о том, что блок 3 исправен.
При отклонении регулируемой величины меньше N4 устройство работает аналогично, но в этом случае на входах элемента И 22 собираются сигналы: Вход 39 "1" Вход 21 "1" Вход 26 "1" Вход 43 "1"
При этом на входах элемента И 20 сигналы: Вход 38 "0" Вход 19 "0" Вход 27 "1" Вход 42 "1"
На выходе 35 элемента И 31 так же, как было описано выше, появляется "1" - отказ регулятора.
На выходе элемента НЕ 50 - "0" - блок 3 исправен.
Отказ трехпозиционного регулятора означает, что в одном съемном блоке регулятора произошел отказ. Как было указано, блок 3 исправен. Это определилось из сравнения знака отклонения сигнала на входе блока 3 управления приводом с сигналом на выход 4 или 5. Одновременно была проверена импульсная работа блока 3. Получен ответ, что импульсная работа через время, большее t, прекратилась при заданных значениях больше N3 или меньше N4 регулируемого параметра. Таким образом подтвердилось, что основная часть регулятора - блок 3 - исправен. Значит, отказал какой-то другой элемент, а именно - датчик 1, задатчик 2, привод 7 или исполнительный механизм 6 или произошел разрыв в трубе 12 и т.д.
Предположим, что отказа в съемных узлах регулятора (датчике 1, задатчике 2 и приводе 7) не произошло, т.е. привод 7 с помощью датчиков 10, 11 конечных положений и блока 51 выдает на блок 13 индикации "Исправен" сигнал "0", датчик 1 и задатчик 2 с помощью компараторов 44 и 45 с выходов 46 и 47 выдают на блок 13 сигналы "Исправен" - "0".
Таким образом, делается вывод, что в составе регулятора произошел отказ исполнительного механизма 6 (разрыв трубопровода маловероятен, так как трубопровод не содержит движущихся частей). Если же "1" выдается с выхода блока 51 или блока 47, значит, отказал соответствующий съемный блок.
Когда с выхода 35 элемента И 31 выдается сигнал "0" - "Регулятор исправен", а с выхода 50 выдается "1" - "Отказ блока 3 управления приводом", сигналы имеют следующие значения:
Вход 32 - "1" (не собрались сигналы совпадения на входе элемента И 20)
Вход 34 - "1" (не собрались сигналы совпадения на входе элемента И 22)
Вход 24 - "1" (на время, большее t2, регулируемая величина не установилась)
Выход 36 - "0"
Выход элемента НЕ 50 - "1" (отказ блока управления приводом).
Поясним, что означает "не собрались сигналы совпадения на входе элементов И 20 и 22". Элемент 20: Вход 38 "0" Вход 19 "1" Вход 27 "1" Вход 42 "1" Элемент 22: Вход 39 "1" или "0" Вход 21 "0" Вход 26 "1" Вход 43 "1"
Предположим, что сработал компаратор 15 - регулируемый параметр выше заданного значения. Выходной сигнал должен появиться на выходе 5 блока 3 управления приводом, а он появился на выходе 4 или вообще не появился. В этой ситуации ясно, что отказал блок 3 управления приводом.
При отказе блока 3 управления приводом, который приводит к уменьшению регулируемого параметра, срабатывает компаратор 18. Анализ отказной ситуации происходит аналогично рассмотренному выше. При этом в обоих случаях с выхода элемента НЕ 50 на блок 13 индикации поступает сигнал "1" - "Отказ", а с выхода 35 - сигнал - "0" - "Исправно".
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного регулирования | 1982 |
|
SU1084766A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СИСТЕМЫ ТОРМОЖЕНИЯ КОЛЕСА ЛЕТАТЕЛЬНОГО АППАРАТА | 1987 |
|
SU1570200A1 |
| Система адаптивного управления шлифовальным станком | 1984 |
|
SU1276483A1 |
| Устройство для управления асинхронизированным синхронным генератором ветроэнергетической установки | 1985 |
|
SU1304167A1 |
| ДВУХПОЗИЦИОННЫЙ АДАПТИВНЫЙ ЭЛЕКТРОННЫЙ РЕГУЛЯТОР | 1997 |
|
RU2138071C1 |
| Устройство для управления асинхронизированным синхронным генератором ветроэнергетической установки | 1986 |
|
SU1399885A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТЕХНОЛОГИЧЕСКОГО ПАРАМЕТРА | 1990 |
|
RU1766190C |
| Устройство для регулирования температуры с самоконтролем | 1987 |
|
SU1432475A1 |
| Устройство для контроля линейного объекта управления | 1989 |
|
SU1753454A1 |
| Следящий электропривод редукторных механизмов с компенсацией люфта | 1986 |
|
SU1388825A1 |
Изобретение относится к автоматике и может быть использовано в системах автоматического управления и контроля подачи воздуха. Цель изобретения - повышение достоверности контроля путем идентификации отказавшего узла регулятора. Регулятор содержит датчик и задатчик параметра, блок управления приводом с двумя выходами, исполнительный механизм, привод, четыре датчика конечных положений, трубопровод, блок индикации, блок контроля цикла работы регулятора, два компаратора, блок контроля длительности импульсов, блок согласования уровней напряжения, блок определения отказа, два двухпороговых компаратора, четыре элемента И, два элемента ИЛИ, элемент НЕ. Сигналы с выходом блока управления приводом поступают на два элемента И, где сравниваются с сигналами с компараторов. Импульсная работа блока управления приводом контролируется блоком контроля длительности импульсов. Если за заданное блоком контроля цикла работы регулятора время регулировка параметра не произошла, вырабатывается аварийный сигнал. 2 з.п.ф-лы, 2 ил.
