оо сх 00
00
to ел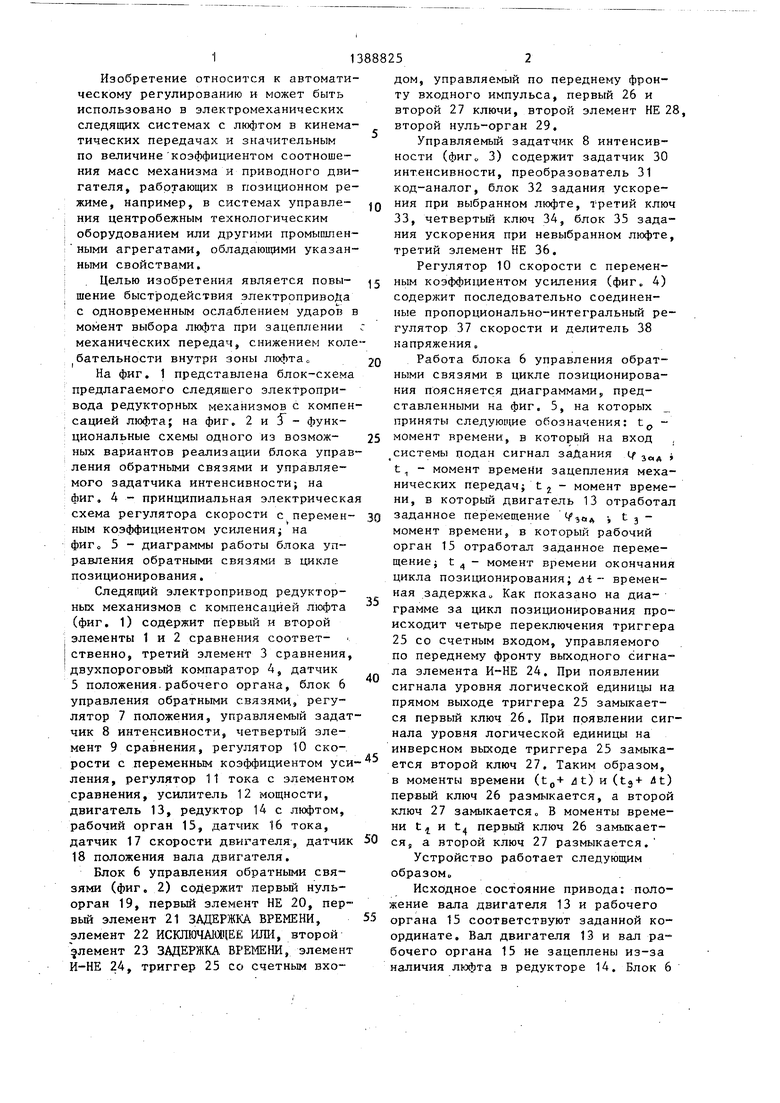
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь кода в скорость вращения вала | 1988 |
|
SU1599991A1 |
| Следящий электропривод с компенсацией люфта | 1981 |
|
SU981929A1 |
| Система компенсации люфта в силовой передаче | 1979 |
|
SU930227A1 |
| Следящий электропривод | 1981 |
|
SU1045219A1 |
| Способ управления электродвигателем скребкового конвейера и электропривод для его осуществления | 1988 |
|
SU1647839A1 |
| Устройство для управления частотно-регулируемым электроприводом | 1985 |
|
SU1309245A1 |
| Устройство для управления бесконтактной асинхронизированной синхронной машиной | 1989 |
|
SU1721787A1 |
| Устройство для управления частотно-регулируемым электроприводом | 1988 |
|
SU1601728A1 |
| СПОСОБ УПРАВЛЕНИЯ ВИНТОВЫМ МЕХАНИЗМОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2013798C1 |
| Электропривод постоянного тока | 1976 |
|
SU657554A1 |


Изобретение относится к автоматическому регулированию и может быть использовано в электромеханических следящих системах, имеющих люфты в кинематических передачах, работающих в позиционном режиме, например в системах управления центробежным технологический оборудованиемо Целью изобретения является повышение быстродействия электропривода с одновременным ослаблением ударов в момент выбора люфта при зацеплении механических передач и снижением колебательности внутри зоны люфта. Электропривод содержит первый 1, второй 2, третий 3, четвертый 9 элементы сравнения, двухпороговый компаратор 4, датчик 5 положения рабочего органа, блок 6 управления обратными связями, регулятор 7 положения, управляемый задатчик 8 интенсивности, регулятор 10 скорости с переменным коэффициентом усиления, регулятор 11 тока с элементом сравнения, усилитель 12 мощности, двигатель 13, редуктор 14 с люфтом, рабочий орган 15, датчик 16 тока двигателя, датчик 18 положения вала двигателя,5 ил. i (Л С
Фиг.Т
10
15
11388825
Изобретение относится к автоматическому регулированию и может быть использовано в электромеханических следящих системах с люфтом в кинематических передачах и значительным по величине коэффициентом соотношения масс механизма и приводного двигателя, работающих в позиционном режиме, например, в системах управле- ; ния центробежным технологическим I оборудованием или другими промышлен- I ными агрегатами, обладаюищми указан- : НЫМИ свойствами.
; . Целью изобретения является повы- I шение быст родействия электропривода : с одновременным ослаблением ударов в момент выбора люфта при зацеплении механических передач, снижением колебательности внутри зоны люфта 20
На фиг. 1 представлена блок-схема предлагаемого следящего электропривода редукторных механизмов с компенсацией люфта; на фиг, 2 и J - функциональные схемы одного из возмож- 25 ных вариантов реализации блока управления обратными связями и управляе- мого задатчика интенсивности; на фиг, 4 - принципиальная электрическая схема регулятора скорости с перемен- ЗО ным коэффициентом усиления; на фиг о 5 - диаграммы работы блока управления обратными связями в цикле позиционирования.
Следящий электропривод редукторных механизмов с компенсацией Л1сфта (фиг. 1) содержит первый и второй i элементы 1 и 2 сравнения соответ- I ственно, третий элемент 3 сравнения.
35
двухпороговьй компаратор 4, датчик 5 положения.рабочего органа, блок 6 управления обратными связями., регулятор 7 положения, управляемый задат- чик В интенсивности, четвертый элемент 9 сравнения, регулятор 10 ско40
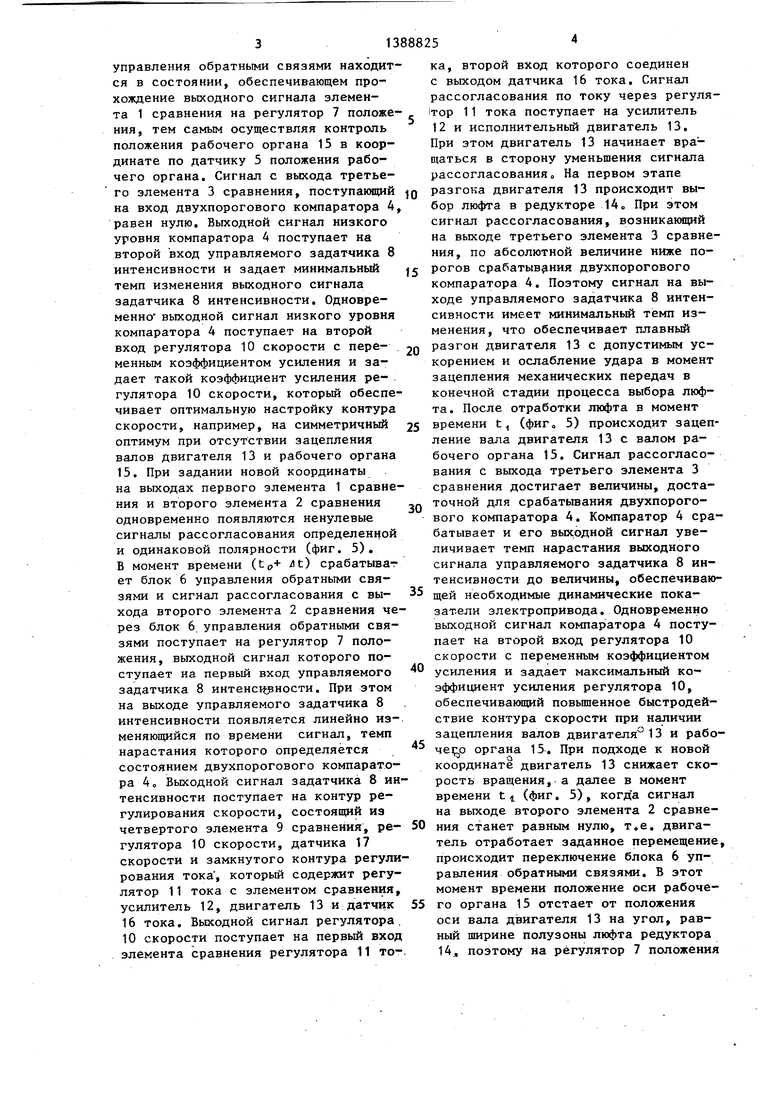
дом, управляемый по переднему фронту входного импульса, первый 26 и второй 27 ключи, второй элемент НЕ 2 второй нуль-орган 29.
Управляемый задатчик 8 интенсивности (фиго 3) содержит задатчик 30 интенсивности, преобразователь 31 код-аналог, блок 32 задания ускорения при выбранном люфте, третий клю 33, четвертый ключ 34, блок 35 зада ния ускорения при невыбранном люфте третий элемент НЕ 36.
Регулятор 10 скорости с переменным коэффидаентом усиления (фиг, 4) содержит последовательно соединенные пропорционально-интегральный ре гулятор 37 скорости и делитель 38 напряжения
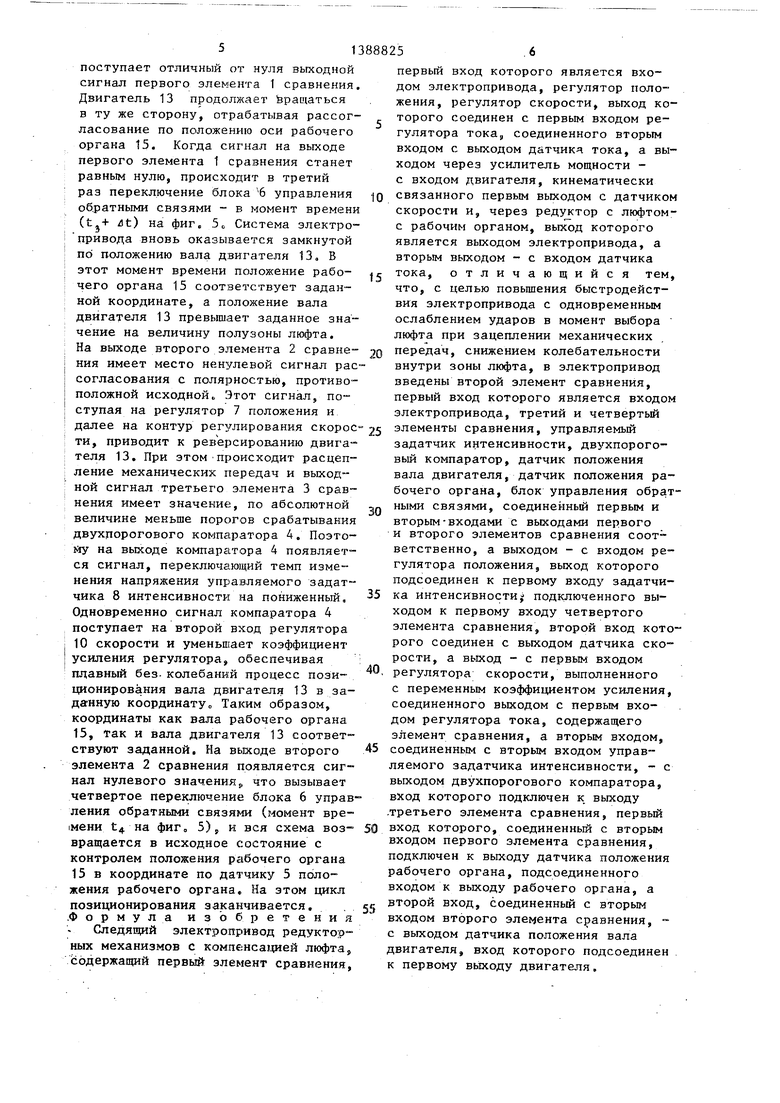
Работа блока 6 управления обратными связями в цикле позиционирования поясняется диаграммами, представленными на фиг, 5, на которых приняты следующие обозначения: t - момент времени, в который на вход системы подан сигнал задания л/ t, - момент времени зацепления меха нических передач; t2 - момент време ни, в который двигатель 13 отработа заданное перемещение 4,of, , t 3 - момент времени, в который рабочий
орган 15 отработал заданное перемещение; t - момент времени окончани цикла позиционирования; ai - временная задержка„ Как показано на диаграмме за цикл позиционирования про исходит четыре переключения триггер 25 со счетным входом, управляемого по переднему фронту выходного сигна ла элемента И-НЕ 24. При появлении сигнала уровня логической единицы н прямом выходе триггера 25 замыкается первый ключ 26. При появлении си нала уровня логической единицы на инверсном выходе триггера 25 замыка
рости с переменным коэффициентом ется второй ключ 27, Таким образом.
ления, регулятор 11 тока с элементом сравнения, усилитепь 12 мощности, двигатель 13, редуктор 14 с люфтом, рабочий орган 15, датчик 16 тока, датчик 17 скорости двигателя, датчик 18 положения вала двигателя.
Блок 6 управления обратными связями (фиг. 2) содержит первый нуль- орган 19, первый элемент НЕ 20, первый элемент 21 ЗАДЕРЖКА ВРЕМЕНИ, элемент 22 ИСКЛЮЧМШГЕЕ ИЛИ, второй элемент 23 ЗАДЕРЖКА ВРЕМЕНИ, элемент И-НЕ 24, триггер 25 со счетным БХО
в моменты времени (t(,+ iit) и (tg dt первый ключ 26 размыкается, а второ ключ 27 замыкается В моменты време ни t и t первый ключ 26 замыкает50 ся, а второй ключ 27 размыкается.
Устройство работает следующим образом
Исходное состояние привода: поло жение вала двигателя 13 и рабочего
55 органа 15 соответствуют заданной ко ординате. Вал двигателя 13 и вал ра бочего органа 15 не зацеплены из-за наличия люфта в редукторе 14. Блок
0
5
0
5 О
дом, управляемый по переднему фронту входного импульса, первый 26 и второй 27 ключи, второй элемент НЕ 28, второй нуль-орган 29.
Управляемый задатчик 8 интенсивности (фиго 3) содержит задатчик 30 интенсивности, преобразователь 31 код-аналог, блок 32 задания ускорения при выбранном люфте, третий ключ 33, четвертый ключ 34, блок 35 задания ускорения при невыбранном люфте, третий элемент НЕ 36.
Регулятор 10 скорости с переменным коэффидаентом усиления (фиг, 4) содержит последовательно соединенные пропорционально-интегральный регулятор 37 скорости и делитель 38 напряжения
Работа блока 6 управления обратными связями в цикле позиционирования поясняется диаграммами, представленными на фиг, 5, на которых приняты следующие обозначения: t - момент времени, в который на вход системы подан сигнал задания л/ j t, - момент времени зацепления механических передач; t2 - момент времени, в который двигатель 13 отработал заданное перемещение 4,of, , t 3 - момент времени, в который рабочий
орган 15 отработал заданное перемещение; t - момент времени окончания цикла позиционирования; ai - временная задержка„ Как показано на диаграмме за цикл позиционирования происходит четыре переключения триггера 25 со счетным входом, управляемого по переднему фронту выходного сигнала элемента И-НЕ 24. При появлении сигнала уровня логической единицы на прямом выходе триггера 25 замыкается первый ключ 26. При появлении сигнала уровня логической единицы на инверсном выходе триггера 25 замыкается второй ключ 27, Таким образом.
в моменты времени (t(,+ iit) и (tg dt) первый ключ 26 размыкается, а второй ключ 27 замыкается В моменты времени t и t первый ключ 26 замыкается, а второй ключ 27 размыкается.
Устройство работает следующим образом
Исходное состояние привода: положение вала двигателя 13 и рабочего
органа 15 соответствуют заданной координате. Вал двигателя 13 и вал рабочего органа 15 не зацеплены из-за наличия люфта в редукторе 14. Блок 6
управления обратными связями находится в состоянии, обеспечивающем прохождение выходного сигнала элемента 1 сравнения на регулятор 7 положения, тем самым осуществляя контроль положения рабочего органа 15 в координате по датчику 5 положения рабочего органа. Сигнал с выхода третьего элемента 3 сравнения, поступакщий на вход двухпорогового компаратора 4 равен нулю. Выходной сигнал низкого уровня компаратора 4 поступает на второй вход управляемого задатчика 8 интенсивности и задает минимальный темп изменения выходного сигнала задатчика 8 интенсивности. Одновременно выходной сигнал низкого уровня компаратора 4 поступает на второй вход регулятора 10 скорости с переменным коэффициентом усиления и задает такой коэффициент усиления ре- . гулятора 10 скорости, который обеспечивает оптимальную настройку контура скорости, например, на симметричный оптимум при отсутствии зацепления валов двигателя 13 и рабочего органа 15. При задании новой координаты на выходах первого элемента 1 сравнения и второго элемента 2 сравнения одновременно появляются ненулевые сигналы рассогласования определенной и одинаковой полярности (фиг. 5). В момент времени (tc,+ t) срабатыват ет блок 6 управления обратньми связями и сигнал рассогласования с выхода второго элемента 2 сравнения через блок 6 управления обратными связями поступает на регулятор 7 положения, выходной сигнал которого поступает на первый вход управляемого задатчика 8 интенс рности. При этом на выходе управляемого задатчика 8 интенсивности появляется линейно изменяющийся по времени сигнал, темп нарастания которого определяется состоянием двухпорогового компарат.о- ра 4., Выходной сигнал задатчика В интенсивности поступает на контур регулирования скорости, состоящий из четвертого элемента 9 сравнения, регулятора 10 скорости, датчика 17 скорости и замкнутого контура регулирования тока , который содержит регулятор 11 тока с элементом сравнения, усилитель 12, двигатель 13 и датчик 16 тока. Выходной сигнал регулятора. 10 скорости поступает на первый вход элемента сравнения регулятора 11 то0
ка, второй вход которого соединен с выходом датчика 16 тока. Сигнал рассогласования по току через регуля- iTop 11 тока поступает на усилитель 12 и исполнительный двигатель 13. При этом двигатель 13 начинает вра- П1аться в сторону уменьшения сигнала рассогласования о На первом этапе
разгона двигателя 13 происходит выбор люфта в редукторе 14. При этом сигнал рассогласования, возникающий на выходе третьего элемента 3 сравнения, по абсолютной величине ниже по5 рогов срабатывания двухпорогового компаратора 4. Поэтому сигнал на выходе управляемого задатчика 8 интенсивности имеет минимальный темп изменения, что обеспечивает плавный разгон двигателя 13 с допустимым ускорением и ослабление удара в момент зацепления механических передач в конечной стадии процесса выбора люфта. После отработки люфта в момент
5 времени t (фиг, 5) происходит зацепление вала двигателя 13 с валом рабочего органа 15. Сигнал рассогласования с выхода третьего элемента 3 сравнения достигает величины, достаточной для срабатьшания двухпорогового компаратора 4. Компаратор 4 срабатывает и его выходной сигнал увеличивает темп нарастания выходного сигнала управляемого задатчика 8 интенсивности до величины, обеспечивающей необходимые динамические показатели электропривода. Одновременно выходной сигнал компаратора 4 поступает на второй вход регулятора 10 скорости с переменным коэффициентом усиления и задает максимальный ко-- эффициент усиления регулятора 10, обеспечивающий повьшенное быстродействие контура скорости при наличии зацепления валов двигателя 13 и рабо- органа 15. При подходе к новой координате двигатель 13 снижает скорость вращения, а далее в момент времени ti (фиг. 5), когд а сигнал на выходе второго элемента 2 сравне0 ния станет равньш нулю, т.е. двигатель отработает заданное перемещение, происходит переключение блока 6 управления обратными связями. В этот момент времени положение оси рабоче5 го органа 15 отстает от положения оси вала двигателя 13 на угол, равный ширине полузоны люфта редуктора 14д поэтому на регулятор 7 положения
0
5
0
5
поступает отличный от нуля выходной сигнал первого элемента 1 сравнения. Двигатель 13 продолжает Ьращаться в ту же сторону, отрабатывая рассогласование по положению оси рабочего органа 15. Когда сигнал на выходе первого элемента 1 сравнения станет равным нулю, происходит в третий раз переключение блока 6 управления обратными связями - в момент времени (t + ut) на фиг. 5о Система электро- привода вновь оказывается замкнутой по положению вала двигателя 13. В этот момент времени положение рабочего органа 15 соответствует заданной координате, а положение вала двигателя 13 превышает заданное значение на величину полузоны люфта. На выходе второго элемента 2 сравне- кия имеет место ненулевой сигнал рас- согласования с полярностью, противо положной исходной,, Этот сигнал, по- ступая на регулятор 7 положения и далее на контур регулирования скорости, приводит к реверсированию двига- теля 13. При этомпроисходит расцеп- ление механических передач и выходной сигнал третьего элемента 3 сравнения имеет значение, по абсолютной величине меньше порогов срабатывания двухпорогового компаратора 4. Поэтому на выходе компаратора 4 появляется сигнал, переключающий темп изменения напряжения управляемого задат- чика 8 интенсивности на пониженный:, Одновременно сигнал компаратора 4 поступает на второй вход регулятора 10 скорости и уменьшает коэффициент усиления регулятора, обеспечивая ;
гщавный без- колебаний процесс позиционирования вала двигателя 13 в заданную координату,, Таким образом, координаты как вала рабочего органа 15, Так и вала двигателя 13 соответствуют заданной. На выходе второго элемента 2 сравнения появляется сигнал нулевого значения,, что вызывает четвертое переключение блока 6 управения обратными связями (момент вре- мени t4 на фиг, 5), и вся схема возвращается в исходное состояние с контролем положения рабочего органа 15 в координате по датчику 5 облоения рабочего органа На этом цикл
позиционирования заканчивается, ормула изобретения Следящий электропривод редуктор- ных механизмов с компенсацией люфта, содержащий первый элемент сравнения,
первый вход которого является входом электропривода, регулятор положения, регулятор скорости, выход которого соединен с первым входом регулятора тока, соединенного вторым входом с выходом датчика тока, а выходом через усилитель мощности - с входом двигателя, кинематически связанного первым выходом с датчиком скорости и, через редуктор с люфтом- с рабочим органом, выход которого является выходом электропривода, а вторым выходом - с входом датчика тока, отличающийся тем, что, с целью повышения быстродействия электропривода с одновременным ослаблением ударов в момент выбора люфта при зацеплении механических
10
15
передач, снижением колебательности внутри зоны люфта, в электропривод введены второй элемент сравнения, первый вход которого является входом электропривода, третий и четвертый
элементы сравнения, управляемый
задатчик интенсивности, двухпорого- вь1й компаратор, датчик положения вала двигателя, датчик положения рабочего органа, блок управления обратными связями, соединенный первым и вторым-входами с выходами первого и второго элементов сравнения соответственно, а выходом - с входом регулятора положения, выход которого подсоединен к первому входу задатчи
5
0
5
ходом к первому входу четвертого элемента сравнения, второй вход которого соединен с выходом датчика скорости, а выход - с первым входом регулятора скорости, выполненного с переменным коэффициентом усиления, соединенного выходом с первым входом регулятора тока, содержащего элемент сравнения, а вторым входом, соединенным с вторым входом управ ляемого задатчика интенсивности, - с выходом двухпорогового компаратора, вход которого подключен к выходу -Третьего элемента сравнения, первый вход которого, соединенный с вторым входом первого элемента сравнения, подключен к выходу датчика положения рабочего органа, подсоединенного входом к выходу рабочего органа, а второй вход, соединенный с вторым входом второго элемента сравнения, с выходом датчика положения вала двигателя, вход которого подсоединен к первому вькоду двигателя,
-( g
г-Ц
дхо52
/V
-./
32
33
х
.1
ж.
26
25
быхоЭ
zJ-
J
J/
вь1Ж.
8
35
36
фие.З
gft/.
| Чиликин М.Г., Ключев В.И., Сандлер А,С„ Теория автоматизированного электропривода М.: Энергия, 1979 | |||
| Следящая система | 1975 |
|
SU608118A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
