l±SziifLliJ W
Изобретение относится к контрольно- измерительной технике, а именно к устройствам для контроля систем, и может быть использовано при контроле технических объектов,
Известно устройство для функционального контроля систем управления, содержащее эталонную модель, подключенную параллельно системе управления, причем математическое описание модели соответ- ствует математическому описанию объекта ко нтроля, блок сравнения, ограничитель, интегратор и логический пороговый блок.
Недостатками устройства являются сложность эталонной модели, порядок кото- рой равен порядку проверяемой системы управления, а также невысокая достоверность контроля.
Известно устройство для функционального контроля линейного объекта управле- ния, содержащее блок индикации, Q каналов контроля, идентичных по структуре, состоящих из N звеньев каждый, причем число звеньев N в каждом из Q каналов равно максимальному порядку М линейных блоков объекта, каждое звено содержит первый сумматор и соединенный с его выходом интегратор и второй сумматор, под- ключенный вторым входом к выходу интегратора последнего звена, первые вхо- ды второго сумматора соединены с первыми входами первых сумматоров и с выходами контролируемого линейного объекта управления, входами соединенного с вторыми входами первых сумматоров, третьи входы первых сумматоров каждого звена, кроме перв ого, соединены с выходом интегратора предыдущего звена, Q пороговых элементов, элемент ИЛИ, выходом подключенный к входу блока индикации, а входами связанный с выходами Q пороговых элементов, вход каждого из которых соединен с выходом второго сумматора данного канала контроля, а также с одним из третьих входов первого сумматора пер- вого звена и с одним из четвертых входов первого сумматора остальных звеньев всех каналов контроля, а третьи входы второго сумматора каждого канала контроля, кроме последнего, соединены соответственно с выходами интеграторов последних звеньев всех последующих каналов контроля.
Недостатком этого устройства являются большие аппаратные затраты на обеспечение заданной достоверности, Достоверность обеспечивается увеличением числа каналов контроля (введением в расчетные выражения матрицы М размерностью Q x S, где Q - число каналов, выбираемое для достижения заданной
достоверности). Однако есть все основания полагать, что для любой компоненты вектора Z (Zi, 7.22з) (вектйр измерения обозначен Y) возможные приращения Z (в данном случае Y) любого знака таковы, что могут быть компенсированы равным приращением другого знака любой другой компоненты вектора Z.
Такая компенсация возможна и комбинацией приращений нескольких компонент вектора измерения (Z),
Таким образом, размерность матрицы М (Q S, где Q S), справедлива только для первого случая компенсаций, а с учетом второго случая размерность матрицы М следует выбирать из условия Q S, если гарантировать наперед заданную достоверность. Учитывая, что каждый канал контроля имеет число звеньев, определяемое максимальным порядком передаточной функции контролируемых блоков (равно N), которое само по себе может быть значительным, то увеличение числа каналов до Q при Q S может потребовать построения системы контроля более сложной, чем сам объект контроля.
Недостатком устройства является также невозможность оценки технического состояния самой системы контроля, что при ее сложности и, в какой-то мере, даже соразмерности с самим объектом контроля может существенно повлиять на достоверность контроля. Расстройка (уход коэффициентов усиления сумматоров при их количестве Q N и размерностях Q и N) при отсутствии системы самоконтроля дополнительно ведет к эффекту маскирования приращений вектора измерения Z, но уже по вине самой системы контроля. Таким образом, расширение системы контроля в интересах устранения маскирующего действия приращения вектора Z из-за отказов объекта контроля гарантированно приводит к этому же эффекту из-за отказов (разрегулировок) самой системы контроля, что и объясняет необходимость введения системы самоконтроля системы контроля.
Блок управления реализует настройку системы контроля посредством цифровой схемы, дискрет шага которой может выбираться достаточно мелким, что позволяет выполнять практически прецизионную настройку каждой компоненты векторов X и Z, система контроля тоже выполнена на цифровых элементах (цифровые схемы сравнения) и шаг настройки тоже может выбираться с любым дискретом, в целом это позволяет гарантировать достоверность соответствия каждой компоненты векторов входа и выхода с точностью до выбранного дискрета. Известные аналоговые схемы гарантировать достоверность подстройки до уровня заданного дискрета по каждой компоненте векторов не могут.
Невозможность выполнения функций самоконтроля и обеспечения контроля объ- екта с заданной достоверностью при ограниченных аппаратных средствах можно также объяснить отсутствием избыточности исходной информации. Последнее объясйя- ется тем, что устройство работает по гото- вому уравнению:
Y А х Y + В х X;(1)
Z Н х Y.(2)
где Y - вектор технического состояния объ- екта контроля:
V - первая производная вектора технического состояния;
X - вектор входных воздействий;
Z - вектор наблюдения;- ,
А - матрица, характеризующая внутрен- ние связи блоков (модулей, элементов) и связи между блоками (модулями, элементами):
В - матрица, характеризующая вектор входных воздействий;
Н - матрица, характеризующая связи между вектором наблюдения Z и техническим состоянием объекта контроля (вектор Y).
Наиболее близким по технической сущности к изобретению является устройство для идентификации объектов управления на линейных блоках с максимальным порядком М, содержащее интеграторы по числу линейных блоков, регулятор и сумматор, потен циометрические входы которого соеди- нены с потенциометрическими входами каждого интегратора и входами устройства, а выход последнего интегратора подключен через сумматор к входу регулятора, выход которого соединен с движками входных по- тенциометров сумматора и всех интеграторов.
Недостатками устройства являются невозможность наращивания достоверности контроля до заданных требований и отсут- ствие самоконтроля самого устройства контроля, что в конечном итоге приводит к снижению достоверности контроля.
Разработка системы контроля начинается со структурной схемы объекта контро- ля. Глубина контроля закладывается с избыточностью, которая в дальнейшем используется для повышения достоверности контроля. При невозможности реализации заданной достоверности контроля наращи- вается избыточность. В целом метод пред- полагает следующие этапы работы. Проводится формализация объекта контроля с глубиной до выбранного функционального элемента. Найденные передаточные
функции ставятся в соответствие структурной схеме. Составляется структурная схема обьекта контроля в соответствии с заданной глубиной, т.е. до элемента, с точностью до которого осуществляется диагностирование ОК. Структурная схема объекта контроля описывается системой уравнений в оперативной форме, связывающих между собой векторы Y, X. F:
Y- Ф(Р1, F2Fk.Xi.X2Хц):
Y2 Фг (Fi, F2Fk XL X2XiJ; (3)
Yi Oi(Fi.F2Fk,Xi.X2...,XL):
Yj frj(Fi,F2Fk. Xi, X2,...,XL),
где F (Fi, F2,...,Fk) - вектор характеристик функциональных элементов (ФЭ)/
k - количество ФЭ;
,X2XJ-вектор, компонентами
которого являются входные (стимулирующие) сигналы;
L - размерность вектора X;
Y Yi, Y2Yj - вектор, компонентами которого являются входные и выходные сигналы ФЭ , сигналы на сумматорах и узловых точках системы;
J - размерность вектора Y.
Дополнительно предположим, что компоненты вектора Y доступны к непосредственному измерению.
Составляется функциональная матрица
гдеЛ 1,2J;k 1,2К,
которая в развернутом виде имеет вид
(5)
Определяется ранг матрицы (5).
Однозначное определение вектора F возможно только в том случае, если его размерность совпадает с рангом функциональной матрицы (5), т.е. обеспечивается диагностирование с глубиной до ФЭ, количество которых К.
Проводится анализ матрицы (5). Возможны следующие варианты: матрица не содержит миноров ранга К; существует только один минор ранга К; существует несколько миноров ранга К.
В первых двух случаях необходимо повысить глубину описания ОК и повторить предыдущие операции до получения заданной избыточности. Избыточность определяется числом миноров ранга К. Каждый
минор ранга К определяет одну из комбинаций вектора Y, подлежащих измерению. Для каждой комбинации компонентов вектора Y составляется система линейных диф- ференциальных уравнений в матричной форме:
Y - А х Y + В х X,(6)
где Y и X - вектор-столбец технического состояния объекта контроля (ОК) и его первая производная соответственно;
X - вектор-столбец входных (стимулирующих) сигналов;
А - матрица, характеризующая связи внутри ФЭ и межу ними;
В - весовая матри( з.
Определяются собственные значения S матрицы А путем решения системы уравнений
A-1xS Ot(7) где 1 -диагональная единичная матрица. По найденным собственным значениям матрицы A (SiSj) определяются координаты
ее собственных векторов Tr, r 1, R:
A-1xSi xTi 0;(8)
А-1 0;
A-1xSR xTR 0,
Составляется матрица собственных векторов
Tx Ti|T2|...(9)
Определяется обратная матрица Тх . Анализируется матрица Т х. возможны следующие ситуации: существует хотя бы один столбец, не содержащий нулей, подача управляющего воздействия (соответствующей компоненты вектора X) обеспечивает полную управляемость ОК; существование нескольких столбцов, не содержащих нулей, обеспечивает избыточность с кратностью, соответствующей их числу; полная управляемость ОК может быть обеспечена комбина- цией нескольких компонент, не обеспечивающих полной управляемости по отдельности.
В случае, если заданная избыточность не обеспечивается, необходимо увеличить глубину разбиения структурной схемы, после чего повторяют предыдущие операции до достижения заданной избыточности.
На этом процедура поиска минимальных количеств компонент вектора X входных (стимулирующих) сигналов, обеспечивающих полную управляемость ОК для каждого набора компонент вектора Y, заканчивается.
Для каждого вектора Y определяется минимальный набор его компонент, обеспечивающий полную наблюдаемость ОК Для этого, составляется матрица вида
В
А°
Si
(Ю),
О
Sj
где матрица В составлена из компонент вектора X, соответствующих столбцам матрицы T X, которые выбирались из условия полной управляемости;
F - исходный линейный оператор;
SiSj - собственные значения матрицы А, соответствующие матрице В и векто- pyY.
Затем определяется транспонированная матрица А° от матрицы А° Определяются собственные значения матрицы А°т
SiSj и координаты векторов для каждого
собственного значения матрицы Si Sj.
Составляется матрица Т° из собственных векторов, затем определяется обратная
матрица от матрицы Т°.
Проводится анализ столбцов матрицы , Возможны следующие варианты: существует столбец, все элементы которого отличны от О (в этом случае полная
наблюдаемость обеспечивается измерением только одной компоненты вектора Y, соответствующей этому столбцу); существует несколько столбцов, не содержащих О (в этом случае обеспечивается избыточность;
полная наблюдаемость возможна при измерении любой из компонент вектора Y. соответствующей столбцу, не содержащему О); столбца все элементы которого отличны от нуля, не существует (в этом случае полная
наблюдаемость обеспечивается выбором таких столбцов, матрица из которых не имеет нулевых строк, а в каждой строке число отличных от нуля элементов минимально). Таким образом, после анализа обратной матрицы получают несколько наборов компонент вектора X - входных сигналов; после анализа столбцов матрицы - несколько наборов компонент вектора Y. подлежащих измерению, что и позволяет
построение системы контроля проводить с избыточностью для повышения достоверности контроля.
Выбор компенент векторов X, Y проводится из соображений минимума их размерности, поэтому в отдельных случаях повышение достоверности контроля можно получить при одновременном снижении размерности входных и выходных векторов, что эквивалентно снижению и аппаратных затрат одновременно. Однако в любом случае наличие избыточности позволяет проводить схемотехническое построение системы с более высокими показателями достоверности.
Рассмотрим на примере правило выбо- ра числа каналов контроля (N) для получения заданной достоверности контроля. Допу- стим, получают несколько наборов компонент векторов входа X и выхода Z:
Х {хп1. х 2xniхп|}( п 1.2N;
(11) Z - {zni, 2П2znjznj), n 1, 2N;
(12) где N - число каналов контроля;
I,J - соответственно максимальные раз- мерности векторов X, Z.
Пусть каждый из наборов векторов X, Z каждого канала контроля обеспечивает достоверность контроля Р, тогда, считая процесс диагностирования технического состояния объекта контроля каждым каналом независимыми событиями, а наборы векторов X, Z непересекающимися, запишем выражение для достоверности контроля D:,
0 Н1-Р)х(1-Р)х...х(1-Р), (13) при Р Р.,. Р... Р выражение (13) имеет вид
(1-P);n 1.2N.(14)
Пример. Пусть Р 0,7; n 1, 2N,
тогда при N 2 D 0,91; при N 3 D « 0.973; при N 5 0 0,997.
Таким образом, увеличивая число кана- лов контроля можно довести достоверность контроля до заданного значения.
Целью изобретения является повышение достоверности результатов контроля.
Поставленная цель достигается тем, что в устройство для идентификации объектов управления на линейных блоках с макси- мальным порядком М, содержащее канал контроля, состоящий из сумматора и М интеграторов, где М - число линейных блоков линейного объекта, причем выход М-го интегратора соединен с входом первого слага- емого первого сумматора, дополнительно введены блок анализа состояния линейного объекта, индикатор, N-1 канал контроля, где N выбирается исходя из требований достоверности по формуле,
D Hi-Pi) x (1-P2) x...x (1-Рм), где D - достоверность контроля линейного объекта;
Рч- достоверность контроля 1-го линейного блока линейного объекта, причем в каждый из каналов контроля введен с второго по(М + 1)-й сумматоры, пороговый блок и блок управления, выходы сумматоров с второго по (М + 1)-й соединены соответственно с входами интеграторов с первого по
М-й, а выходы интеграторов с первого по (М-1}-й соединены соответственно с входами первого слагаемого сумматоров с третьего по (М 1)-й, выход первого сумматора соединен с информационным входом порогового блока, входы вторых слагаемых сумматоров каждого из каналов образуют первую группу информационных входов каждого канала, которые в свою очередь образуют первую группу информационных входов устройства, предназначенную для подключения входных сигналов линейного объекта, входы третьих слагаемых сумматоров каждого из каналов образуют вторую группу информационных входов каждого канала, которые в свою очередь образуют вторую группу информационных входов устройства, предназначенную для подключения выходных сигналов линейного объекта, входы включения компонент входных сигналов объекта контроля, входы регулировки коэффициентов передачи входных сигналов объекта контроля, входы включения компонент выходных сигналов объекта контроля, входы регулировки коэффициентов передачи выходных сигналов объекта контроля сумматора соединены с одноименными выходами блока управления, вход признака рассогласования которого соединен с выходом порогового устройства и является выходом признака рассогласования канала контроля, вход начала настройки которого соединен с одноименным входом блока управления, выход признака исправности которого является одноименным выходом канала контроля, выходы признака рассогласования каналов контроля образуют первую группу информационных входов блока анализа состояния линейного объекта, выходы признака исправности каналов контроля образуют вторую группу информационных входов блока анализа состояния линейного объекта, входы начала настройки каналов контроля соединены с выходом начала настройки блока анализа состояния линейного объекта, информационный выход которого подсоединен к информационному входу индикатора.
Блок управления содержит счетчик цикла, первый и второй триггеры, счетчик такта, первый и второй одновибраторы, первый и второй за датчики сигналов, первую и вторую группы ключей, первую и вторую группы счетчиков, первую и вторую группы цифроаналоговых преобразователей, схему сравнения, элемент И и генератор тактовых импульсов, выход которого соединен со счетным входом счетчика цикла, первым входом элемента И и информационными входами ключей первой и второй групп, управляющие входы ключей первой группы соединены с первой группой выходов первого задатчика сигналов, а управляющие входы ключей второй группы соединены с первой группой выходов второго задатчика сигналов, адресные входы которого соединены с адресными входами первого задатчика сигналов и выходами счетчика такта, вход сброса которого соединен с входами сброса счетчика цикла, первого триггера, первой и второй групп счетчиков и выходом первого одновибратора, вход запуска которого соединен с выходом второго триггера и вторым входом элемента И, третий вход которого является входом признака рассог- ласования блока, а вых соединен со счетным входом счетчика такта, выход счетчика цикла соединен с входом устанбйШттервого триггера, выход которого соединен с входом запуска одновибратора, выход которого со- единен с входом сброса второго триггера, вход установки которого является входом признака начала настройки блока, счетные входы счетчиков первой и второй групп соединены с выходами ключей первой и вто- рой групп, а выходы соединены с входами цифроаналоговых преобразователей первой и второй групп, выходы которых образуют выходы регулировки коэффициентов передачи соответственно входных и выход- ных сигналов объекта контроля, вторая группа выходов первого и вторбго задатчи- ков сигналов являются выходами включения компонент соответственно входных и выходных сигналов объекта контроля, выход первого триггера и выход схемы сравнения образуют выход признака исправности блока, выходы счетчиков первой группы соединены с первой группой входов схемы сравнения, а выходы сметчиков второй труп- пы соединены с второй группой входов схемы сравнения.
Блок анализа состояния линейного объекта содержите первого по пятый элементы И, первый и второй узлы согласования и одновибратор, выход которого является выходом начйла настройки блока, входы первого элемента И являются первой группой информационных входов блока, а выход соединен с первым входом пятого элемента И, второй вход которого соединен с выходом четвертого элемента И, первый и второй входы которого соединены соответственно с выходами второго и третьего элементов И, входы второго и третьего элементов И явля- ются второй группой информационных входов блока, входы второго элемента И соединены с входами первого узла согласования, входы третьего элемента И соединены с входами второго узла согласования,
выходы первого и второго узлов согласования, четвертого и пятого элементов И образуют информационный выход блока
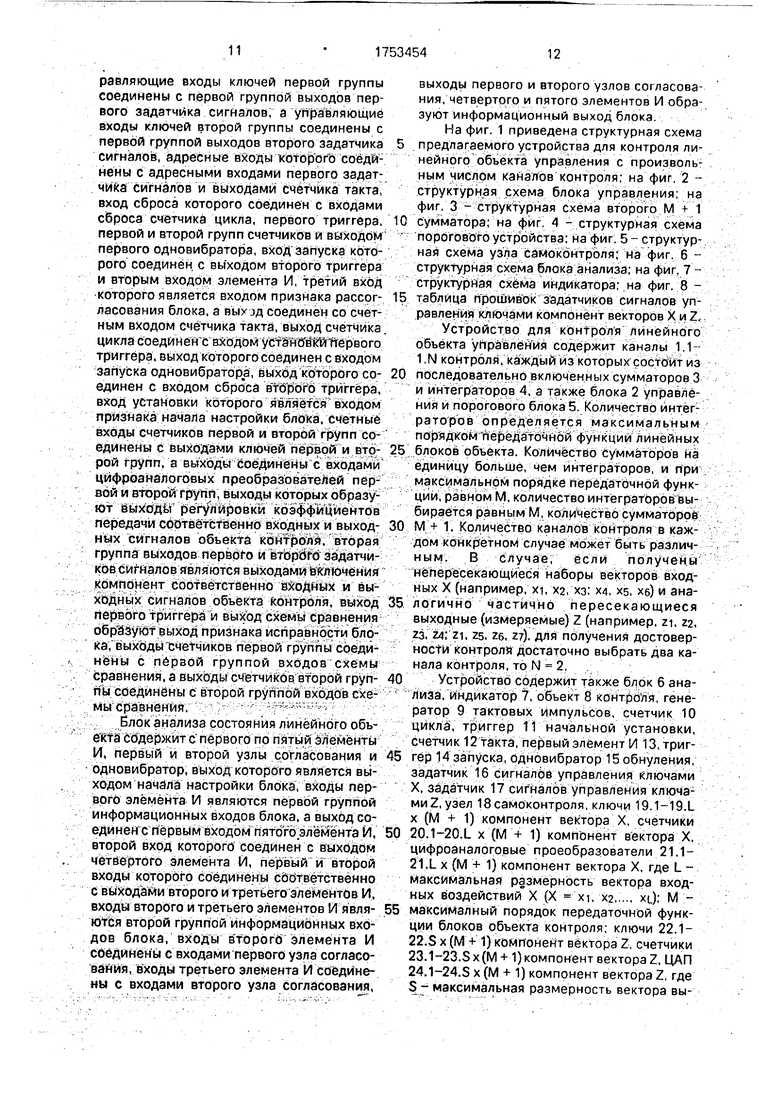
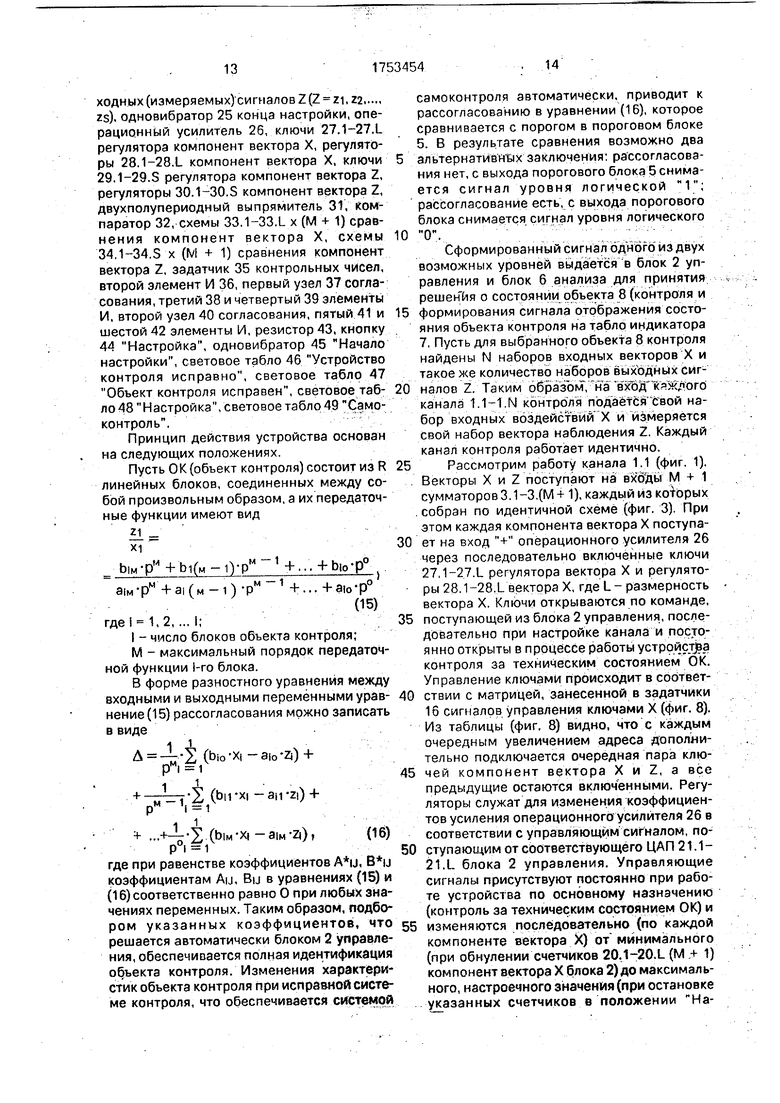
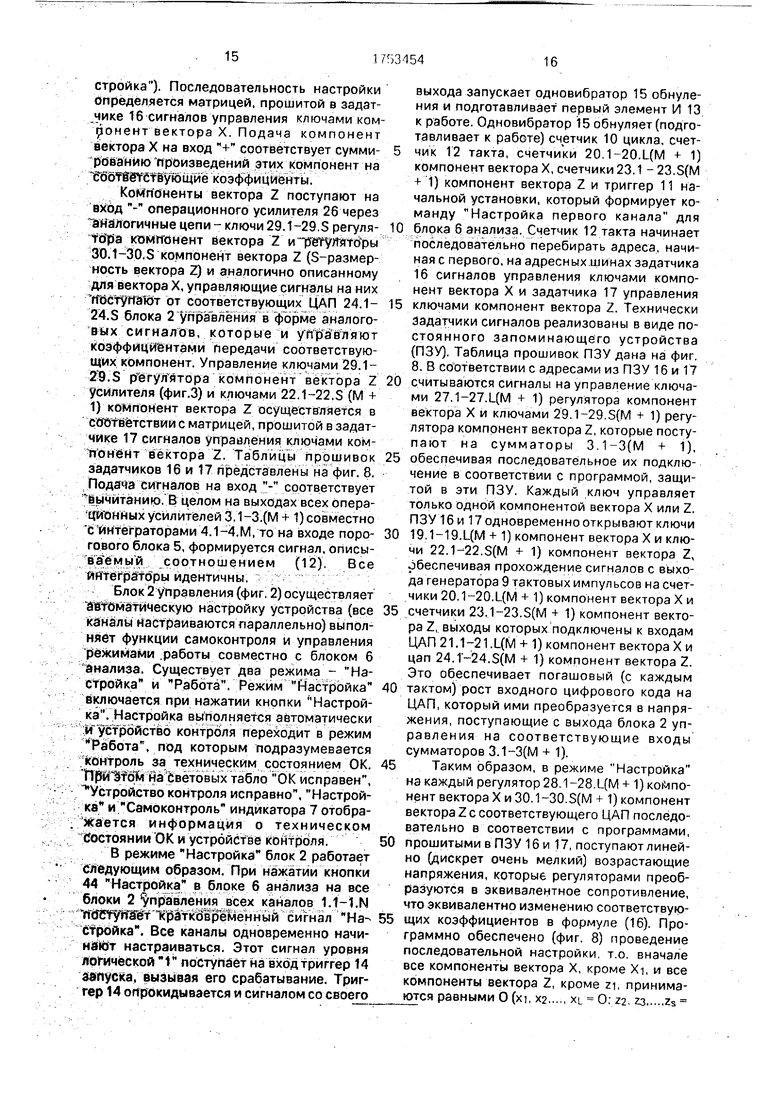
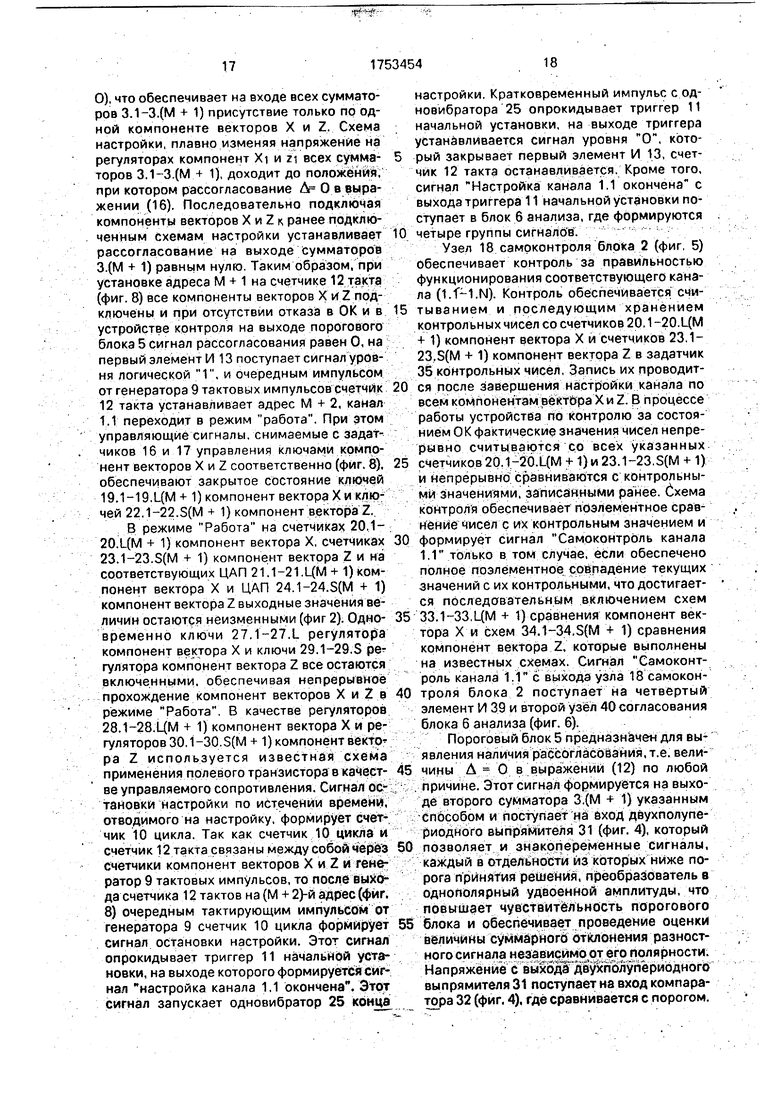
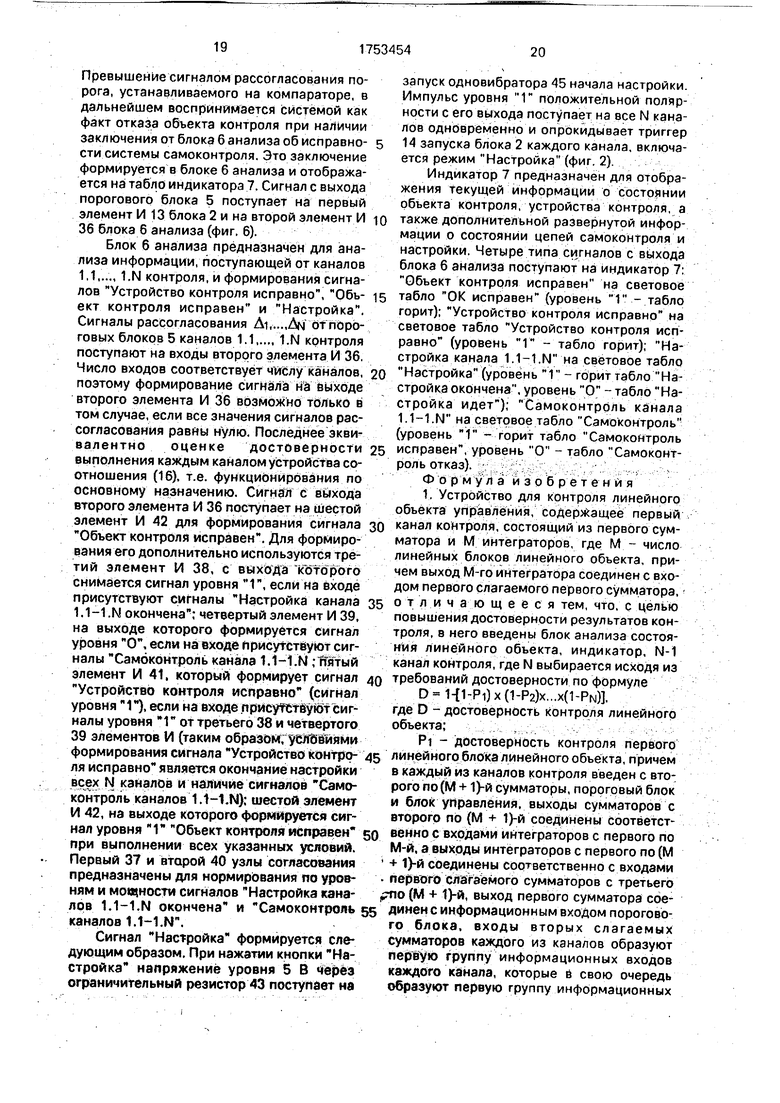
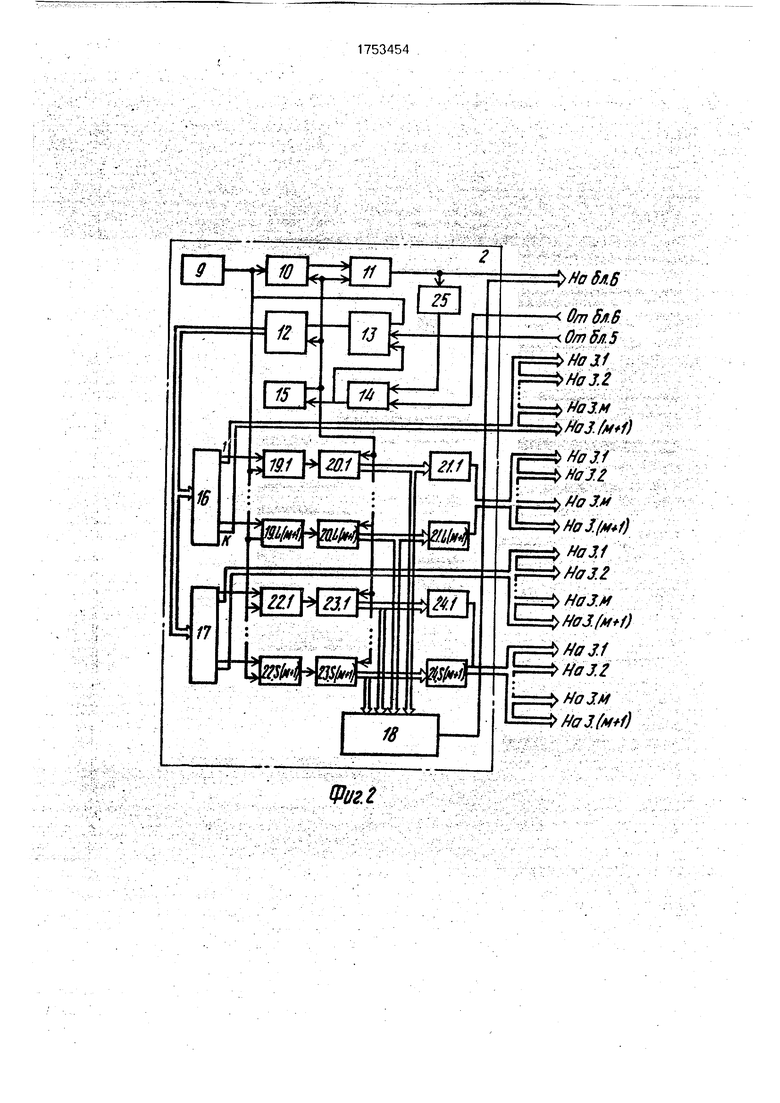
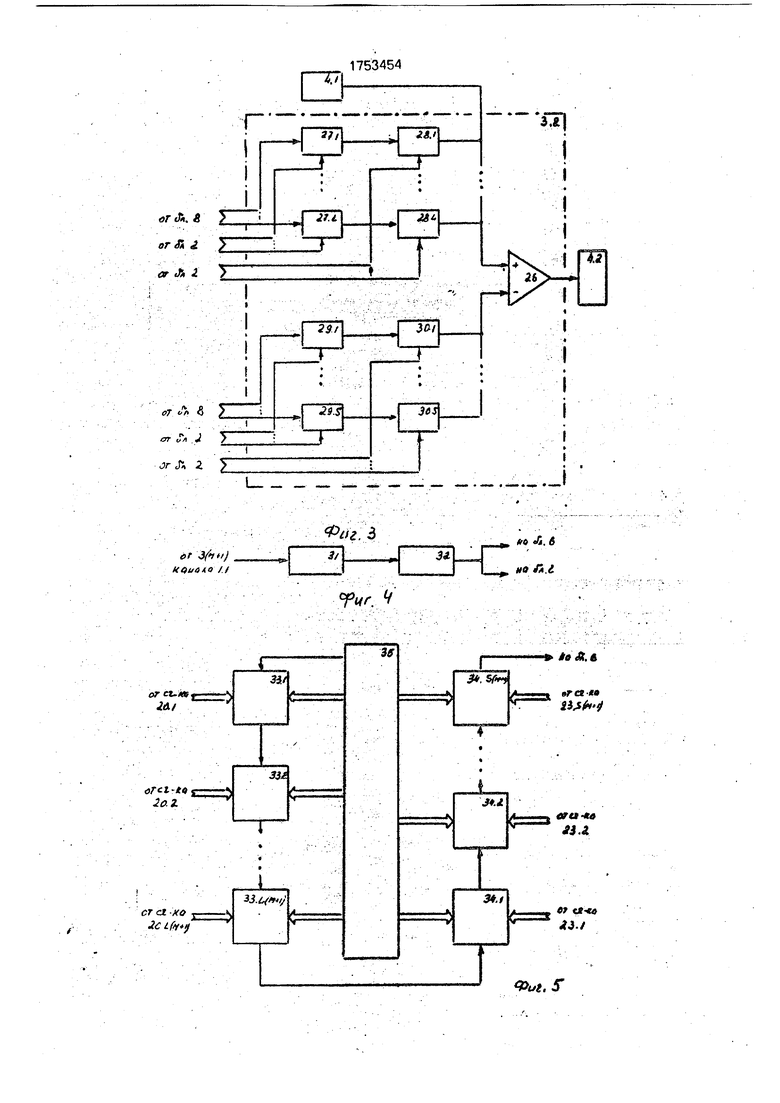
На фиг 1 приведена структурная схема предлагаемого устройства для контроля линейного объекта управления с произвольным числом каналов контроля; на фиг 2 - структурная схема блока управления, на фиг 3 - структурная схема второго М + 1 сумматора; на фиг 4 - структурная схема порогового устройства; на фиг 5 - структурная схема узла самоконтроля; на фиг 6 - структурная схема блока анализа; на фиг, 7 - структурная схема индикатора; на фиг. 8 - таблица прошивок задатчиков сигналов управления ключами компонент векторов X и Z,
Устройство для контроля линейного объекта управления содержит каналы 1 1 1 N контроля, каждый из которых состоит из последовательно включенных сумматоров 3 и интеграторов 4, а также блока 2 управления и порогового блока 5 Количество интеграторов определяется максимальным порядком передаточной функции линейных блоков объекта. Количество сумматоров на единицу больше, чем интеграторов, и при максимальном порядке передаточной функции, равном М, количество интеграторов выбирается равным М, количество сумматоров М + 1. Количество каналов контроля в каждом конкретном случае может быть различным. В случае, если получены непересекающиеся наборы векторов входных X (например, xi, Х2, хз: Х4, xs, xe) и аналогично частично пересекающиеся выходные (измеряемые) Z (например, zt. Z2, 23, 241 21, 25, 26, z), для получения достоверности контроля достаточно выбрать два канала контроля,то N 2
Устройство содержит также блок 6 анализа, индикатор 7, объект 8 контроля, генератор 9 тактовых импульсов, счетчик 10 цикла, триггер 11 начальной установки, счетчик 12 такта, первый элемент И 13, триггер 14 запуска, одновибратор 15 обнуления, задатчик 16 сигналов управления ключами X, задатчик 17 сигналов управления ключа- MHZ, узел 18самоконтроля, ключи 19 1-19.L х (М + 1) компонент вектора X, счетчики 20.1-20.L х (М + 1) компонент вектора X. цифроаналоговые проеобразователи 21.1- 21,L х (М + 1) компонент вектора X, где L - максимальная размерность вектора входных воздействий X (X xi, Х2, , XL); М - максималный порядок передаточной функции блоков объекта контроля, ключи 22.1- 22.S х (М + 1) компонент вектора Z счетчики 23.1-23.S х (М + 1) компонент вектора Z, ЦАП 24.1-24.S х (М + 1) компонент вектора Z где Sj максимальная размерность вектора выходных (измеряемых) сигналов Z (Z ZL гг
zs). одновибратор 25 конца настройки, операционный усилитель 26, ключи 27.1-27.L регулятора компонент вектора X, регуляторы 28.1-28.L компонент вектора X, ключи 29.1-29.S регулятора компонент вектора Z, регуляторы 30.1-30.S компонент вектора Z, двухполупериодный выпрямитель 31, компаратор 32, схемы 33.1-33.L х (М + 1) сравнения компонент вектора X, схемы 34.1-34.S х (М + 1) сравнения компонент вектора Z, задатчик 35 контрольных чисел, второй элемент И 36, первый узел 37 согласования, третий 38 и четвертый 39 элементы И, второй узел 40 согласования, пятый 41 и шестой 42 элементы И, резистор 43, кнопку 44 Настройка, одновибратор 45 Начало настройки, световое табло 46 Устройство контроля исправно, световое табло 47 Объект контроля исправен, световое таб- ло 48 Настройка, световое табло 49 Самоконтроль.
Принцип действия устройства основан на следующих положениях.
Пусть ОК (объект контроля) состоит из R линейных блоков, соединенных между собой произвольным образом, а их передаточные функции имеют вид
11
Х1
Ь|м-рм+Ь1(м-1)-рм T+...+bto-pP
)
aiM-pM -fai(M-i)-pM 1+...+aio-p°
(15) где i 1,2, ... I;
I - число блоков объекта контроля;
М - максимальный порядок передаточной функции 1-го блока.
В форме разностного уравнения между входными и выходными переменными уравнение (15) рассогласования можно записать в виде
Л 4гЈ (bi0-xi-aio-zi) + pi 1
ц-j S (birxi -airzi)-f
i 1
1 1
2 (biM-xi -aiM-Zi), P°i i
где при равенстве коэффициентов , коэффициентам Аи, Ви в уравнениях (15) и (16) соответствен но равно О при любых значениях переменных. Таким образом, подбором указанных коэффициентов, что решается автоматически блоком 2 управления, обеспечивается полная идентификация объекта контроля. Изменения характеристик объекта контроля при исправной системе контроля, что обеспечивается системой
51015 20
25
30
35
40
45
50
55
самоконтроля автоматически, приводит к рассогласованию в уравнении (16), которое сравнивается с порогом в пороговом блоке 5. В результате сравнения возможно два альтернативных заключения1 рассогласования нет, с выхода порогового блока 5 снимается сигнал уровня логической рассогласование есть, с выхода порогового блока снимается сигнал уровня логического О.
Сформированный сигнал одного из двух возможных уровней выдается в блок 2 управления и блок 6 анализа для принятия решения о состоянии объекта 8 (контроля и формирования сигнала отображения состояния объекта контроля на табло индикатора 7, Пусть для выбранного объекта 8 контроля найдены N наборов входных векторов X и такое же количество наборов выходных сигналов Z. Таким образом, на в хЪд кажлого канала 1.1-1 N контроля подается свой набор входных воздействий X и измеряется свой набор вектора наблюдения Z. Каждый канал контроля работает идентично.
Рассмотрим работу канала 1.1 (фиг. 1). Векторы X и Z поступают на входы М + 1 сумматоровЗ.1-3 (М+ 1), каждый из которых собран по идентичной схеме (фиг. 3) При этом каждая компонента вектора X поступает на вход + операционного усилителя 26 через последовательно включенные ключи 27.1-27.L регулятора вектора X и регуляторы 28.1-28.L вектора X, где L - размерность вектора X. Ключи открываются по команде, поступающей из блока 2 управления, последовательно при настройке канала и постоянно открыты в процессе работы устройства контроля за техническим состоянием ОК. Управление ключами происходит в соответствии с матрицей, занесенной в задатчики 16 сигналов управления ключами X (фиг. 8). Из таблицы (фиг. 8) видно, что с каждым очередным увеличением адреса дополнительно подключается очередная пара ключей компонент вектора X и Z, а все предыдущие остаются включенными. Регуляторы служат для изменения коэффициентов усиления операционного усилителя 26 в соответствии с управляющим сигналом, поступающим от соответствующего ЦАП 21.1- 21.L блока 2 управления. Управляющие сигналы присутствуют постоянно при работе устройства по основному назначению (контроль за техническим состоянием ОК) и изменяются последовательно (по каждой компоненте вектора X) от минимального (при обнулении счетчиков 20.1-20.L (М + 1) компонент вектора X блока 2) до максимального, настроечного значения (при остановке указанных счетчиков в положении Настройка). Последовательность настройки определяется матрицей, прошитой в задат- чике 16 сигналов управления ключами ком- ронент вектора X. Подача компонент вектора X на вход + соответствует суммированию произведений этих компонент на ТбЬТбёТбтвующие коэффициенты.
Компоненты вектора Z поступают на вход - операционного усилителя 26 через аналогичные цепи -ключи 29.1-29 S регулятора компонент вектора Z и ртету/Гяторы 30.1-30.S компонент вектора Z (S-размер- ность вектора Z) и аналогично описанному для вектора X, управляющие сигналы на них ШстугШТот от соответствующих ЦАП 24.1- 24.S блока 2 управления в форме аналоговых сигналов, которые и управляют коэффициентами передачи соответствующих компонент. Управление ключами 29.1- .5 регулятора компонент вектора Z усилителя (фиг.З) и ключами 22.1-22.S (M + 1) компонент вектора Z осуществляется в соответствии с матрицей, прошитой в задат- чике 17 сигналов управления ключами компонент вектора Z. Таблицы прошивок задатчиков 16 и 17 представлены на фиг. 8. Подача сигналов на вход - соответствует вычитанию. В целом на выходах всех операционных усилителей 3.1-3.(М + 1) совместно с интеграторами 4.1-4.М, то на входе порогового блока 5, формируется сигнал, описы- ва емый соотношением (12) Все интеграторы идентичны.
Блок 2 управления (фиг. 2) осуществляет автоматическую настройку устройства (все каналы настраиваются параллельно) выполняет функции самоконтроля и управления режимами работы совместно с блоком 6 анализа. Существует два режима - Настройка и Работа. Режим Настройка включается при нажатии кнопки Настройка. Настройка выполняется автоматически и устройство контроля переходит в режим Работа, под которым подразумевается контроль за техническим состоянием ОК. на световых табло ОК исправен, Устройство контроля исправно, Настройка и Самоконтроль индикатора 7 отобра- лжается информация о техническом Состоянии ОК и устройстве контроля.
В режиме Настройка блок 2 работает Следующим образом. При нажатии кнопки 44 Настройка в блоке 6 анализа на все блоки 2 правления всех каналов 1.1-1.N TrWCIfywiet Тфатковременный сигнал Настройка. Все каналы одновременно начинают настраиваться. Этот сигнал уровня логической Г поступает на вход триггер 14 запуска, вызывая его срабатывание. Триггер 14 опрокидывается и сигналом со своего
выхода запускает одновибратор 15 обнуления и подготавливает первый элемент И 13 к работе. Одновибратор 15 обнуляет (подготавливает к работе) счетчик 10 цикла, счетчик 12 такта, счетчики 20 1-20.ЦМ + 1) компонент вектора X, счетчики 23 1 - 23 S(M + 1) компонент вектора Z и триггер 11 начальной установки, который формирует команду Настройка первого канала для
0 блока б анализа. Счетчик 12 такта начинает последовательно перебирать адреса, начиная с первого, на адресных шинах задатчика 16 сигналов управления ключами компонент вектора X и задатчика 17 управления
5 ключами компонент вектора Z. Технически Задатчики сигналов реализованы в виде постоянного запоминающего устройства (ПЗУ), Таблица прошивок ПЗУ дана на фиг 8. В соответствии с адресами из ПЗУ 16 и 17
0 считываются сигналы на управление ключами 27.1-27.ЦМ + 1) регулятора компонент вектора X и ключами 29 1-29 S(M + 1) регулятора компонент вектора Z, которые посту- пают на сумматоры 3 1-3(М + 1),
5 обеспечивая последовательное их подключение в соответствии с программой, защитой в эти ПЗУ. Каждый ключ управляет только одной компонентой вектора X или Z. ПЗУ 16 и 17 одновременно открывают ключи
0 19 1-19.ЦМ + 1) компонент вектора X и ключи 22.1-22.S(M + 1) компонент вектора Z, обеспечивая прохождение сигналов с выхода генератора 9 тактовых импульсов на счетчики 20 1-20.ЦМ + 1) компонент вектора X и
5 счетчики 23.1-23.S(M + 1) компонент вектора Z, выходы которых подключены к входам ЦАП 21.1-21.ЦМ + 1) компонент вектора X и цап 24..S(M + 1) компонент вектора Z. Это обеспечивает погашовый (с каждым
0 тактом) рост входного цифрового кода на ЦАП, который ими преобразуется в напряжения, поступающие с выхода блока 2 управления на соответствующие входы сумматоров 3.1-3(М + 1).
5 Таким образом, в режиме Настройка на каждый регулятор 28 1-28 ЦМ + 1) койпо- нент вектора X и 30 1-30 S(M + 1) компонент вектора Z с соответствующего ЦАП последовательно в соответствии с программами,
0 прошитыми в ПЗУ 16 и 17, поступают линейно (дискрет очень мелкий) возрастающие напряжения, которые регуляторами преобразуются в эквивалентное сопротивление, что эквивалентно изменению соответствую5 щих коэффициентов в формуле (16). Программно обеспечено (фиг. 8) проведение последовательной настройки т о вначале все компоненты вектора X, кроме Xi, и все компоненты вектора Z, кроме zi, принимаются равными О (х, Х2 , XL О гг v, ,zs
О), что обеспечивает на входе всех сумматоров 3.1-3.(М + 1) присутствие только по одной компоненте векторов X и Z. Схема настройки, плавно изменяя напряжение на регуляторах компонент Xi и zi всех сумматоров 3.1-3.(М + 1), доходит до положения, при котором рассогласование Д О в выражении (16). Последовательно подключая компоненты векторов X и Z к ранее подключенным схемам настройки устанавливает рассогласование на выходе сумматоров 3.(М + 1) равным нулю. Таким образом, при установке адреса М + 1 на счетчике 12 такта (фиг. 8) все компоненты векторов X и Z подключены и при отсутствии отказа в ОК и в устройстве контроля на выходе порогового блока 5 сигнал рассогласования равен О, на первый элемент И 13 поступает сигнал уровня логической 1, и очередным импульсом от генератора 9 тактовых импульсов счетчик 12 такта устанавливает адрес М + 2, канал 1.1 переходит в режим работа. При этом управляющие сигналы, снимаемые с задат- чиков 16 и 17 управления ключами компонент векторов X и Z соответственно (фиг. 8), обеспечивают закрытое состояние ключей 19.1-19.ЦМ + 1) компонент вектора X и ключей 22,1-22.S(M + 1) компонент вектора Z.
В режиме Работа на счетчиках 20.1- 20.ЦМ + 1) компонент вектора X, счетчиках 23.1-23.S(M + 1) компонент вектора Z и на соответствующих ЦАП 21.1-21.ЦМ+ компонент вектора X и ЦАП 24.1-24.S(M + 1) компонент вектора Z выходные значения величин остаются неизменными (фиг 2). Одновременно ключи 27.1-27.L регулятора компонент вектора X и ключи 29.1-29.S регулятора компонент вектора Z все остаются включенными, обеспечивая непрерывное прохождение компонент векторов X и 2 в режиме Работа. В качестве регуляторов 28.1-28.ЦМ + 1) компонент вектора X и регуляторов 30.1-30.S(M + 1) компонент вектора Z используется известная схема применения полевого транзистора в качестве управляемого сопротивления. Сигнал остановки настройки по истечении времени, отводимого на настройку, формирует счетчик 10 цикла. Так как счетчик 10 цикла и счетчик 12 такта связаны между собой через счетчики компонент векторов X и 2 и генератор 9 тактовых импульсов, то после выхода счетчика 12 тактов на (М + 2}-й адрес (фиг. 8) очередным тактирующим импульсом от генератора 9 счетчик 10 цикла формирует сигнал остановки настройки. Этот сигнал опрокидывает триггер 11 начальной установки, на выходе которого формируется сигнал настройка канала 1,1 окончена. Этот сигнал запускает одновибратор 25 конца
настройки. Кратковременный импульс с од- новибратора 25 опрокидывает триггер 11 начальной установки, на выходе триггера устанавливается сигнал уровня О, который закрывает первый элемент И 13, счетчик 12 такта останавливается. Кроме того, сигнал Настройка канала 1.1 окончена с выхода триггера 11 начальной установки поступает в блок 6 анализа, где формируются
0 четыре группы сигналов.
Узел 18 самоконтроля блока 2 (фиг, 5) обеспечивает контроль за правильностью функционирования соответствующего канала (1.1M.N). Контроль обеспечивается счи5 тыванием и последующим хранением контрольных чисел со счетчиков 20,1 -20.ЦМ + 1) компонент вектора X и счетчиков 23,1- 23.S(M + 1) компонент вектора Z в задатчик 35 контрольных чисел, Запись их проводит0 ся после завершения настройки канала по всем компонентам вектора Хи Z. В процессе работы устройства по контролю за состоянием О К фактические значения чисел непрерывно считываются со всех указанных
5 счетчиков20.1-20.ЦМ + 1)и 23.1-23.S(M + 1) и непрерывно сравниваются с контрольными значениями, записанными ранее. Схема контроля обеспечивает поэлементное сравнение чисел с их контрольным значением и
0 формирует сигнал Самоконтроль канала 1.1 только в том случае, если обеспечено полное поэлементное совпадение текущих значений с их контрольными, что достигается последовательным включением схем
5 33.1-33,ЦМ + 1) сравнения компонент вектора X и схем 34.1-34.S(M + 1) сравнения компонент вектора Z, которые выполнены на известных схемах. Сигнал Самоконтроль канала 1.1 с выхода узла 18 самокон0 троля блока 2 поступает на четвертый элемент И 39 и второй узел 40 согласования блока 6 анализа (фиг. 6).
Пороговый блок 5 предназначен для выявления наличия рассогласования, т.е. вели5 чины Д О в выражении (12) по любой причине. Этот сигнал формируется на выходе второго сумматора 3,(М + 1) указанным способом и поступает на вход двухполупе- риодного выпрямителя 31 (фиг. 4), который
0 позволяет и знакопеременные сигналы, каждый в отдельности из которых ниже порога принятия решения, преобразователь в однополярный удвоенной амплитуды, что повышает чувствительность порогового
5 блока и обеспечивает проведение оценки величины суммарного отклонения разностного сигнала независимо от его полярности. Напряжение с выхода двухгТолупериодного выпрямителя 31 поступает на вход компаратора 32 (фиг, 4), где сравнивается с порогом.
Превышение сигналом рассогласования порога, устанавливаемого на компараторе, в дальнейшем воспринимается системой как факт отказа объекта контроля при наличии заключения от блока 6 анализа об исправности системы самоконтроля. Это заключение формируется в блоке 6 анализа и отображается на табло индикатора 7. Сигнал с выхода порогового блока 5 поступает на первый элемент И 13 блока 2 и на второй элемент И 36 блока 6 анализа (фиг. 6).
Блок б анализа предназначен для анализа информации, поступающей от каналов 1,1,..., 1.N контроля, и формирования сигналов Устройство контроля исправно, Объект контроля исправен и Настройка. Сигналы рассогласования Л1,...,Лм от пороговых блоков 5 каналов 1.11.N контроля
поступают на входы второго элемента И 36, Число входов соответствует числу каналов, поэтому формирование сигнала на выходе второго элемента И 36 возможно только в том случае, если все значения сигналов рассогласования равны нулю. Последнее эквивалентно оценке достоверности выполнения каждым каналом устройства соотношения (16), т.е. функционирования по основному назначению. Сигнал с выхода второго элемента И 36 поступает на шестой элемент И 41 для формирования сигнала Объект контроля исправен. Для формирования его дополнительно используются третий элемент И 38, с выхода которого снимается сигнал уровня 1, если на Ёходе присутствуют сигналы Настройка канала 1.1-1.N окончена : четвертый элемент И 39, на выходе которого формируется сигнал уровня О, если на входе Присутствуют сигналы Самоконтроль канала 1.1-1.N; пятый элемент И 41, который формирует сигнал Устройство контроля исправно (сигнал уровня 1), если на входе присутствуют сигналы уровня Г от третьего 38 и четвертого 39 элементов И (таким образом, условиями формирования сигнала Устройство контроля исправно является окончание настройки всех N каналов и наличие сигналов Самоконтроль каналов 1.1-1.N): шестой элемент И 42, на выходе которого формируется сигнал уровня Т Объект контроля исправен при выполнении всех указанных условий. Первый 37 и второй 40 узлы согласования предназначены для нормирования по уровням и мощности сигналов Настройка каналов 1.1-1.N окончена и Самоконтроль каналов 1.1-1.N.
Сигнал Настройка формируется следующим образом. При нажатии кнопки Настройка напряжение уровня 5 В через ограничительный резистор 43 поступает на
запуск одновибратора 45 начала настройки. Импульс уровня 1 положительной полярности с его выхода поступает на все N каналов одновременно и опрокидывает триггер
14 запуска блока 2 каждого канала, включается режим Настройка (фиг. 2)
Индикатор 7 предназначен для отображения текущей информации о состоянии объекта контроля, устройства контроля, а
также дополнительной развернутой информации о состоянии цепей самоконтроля и настройки. Четыре типа сигналов с выхода блока 6 анализа поступают на индикатор 7: Объект контроля исправен на световое
5 табло ОК исправен (уровень 1 - табло горит); Устройство контроля исправно на световое табло Устройство контроля исправно (уровень Г - табло горит); Настройка канала 1.1-1.N на световое табло
0 Настройка (уровень 1 - горит табло Настройка окончена, уровень О - табло Настройка идет); Самоконтроль канала 1.1-1.N на световое табло Самоконтроль (уровень 1 - горит табло Самоконтроль
5 исправен, уровень О - табло Самоконтроль отказ).
Формула изобретения 1. Устройство для контроля линейного объекта управления, содержащее первый
0 канал контроля, состоящий из первого сумматора и М интеграторов, где М - число линейных блоков линейного объекта, причем выход М-го интегратора соединен с входом первого слагаемого первого сумматора,
5 отличающееся тем, что, с целью повышения достоверности результатов контроля, в него введены блок анализа состояния линейного объекта, индикатор, N-1 канал контроля, где N выбирается исходя из
0 требований достоверности по формуле
D Hl-Pi)x(1-P2)x...x(1-PN), где D - достоверность контроля линейного объекта;
Pi - достоверность контроля первого
5 линейного блока линейного объекта, причем в каждый из каналов контроля введен с второго по (М + 1}-й сумматоры, пороговый блок и блок управления, выходы сумматоров с второго по (М + 1)-й соединены соответст0 венно с входами интеграторов с первого по
М-й, а выходы интеграторов с первого по (М
1 + 1)-й соединены соответственно с входами
первого слагаемого сумматоров с третьего
,по (М + 1)-й, выход первого сумматора сое5 динен с информационным входом порогового блока, входы вторых слагаемых сумматоров каждого из каналов образуют первую группу информационных входов каждого канала, которые в свою очередь образуют первую группу информационных
входов устройства, предназначенную дли подключения входных сигналов линейного объекта, входы третьих слагаемых сумматоров каждого из каналов образуют вторую группу информационных входов каждого канала, которые в свою очередь образуют вторую группу информационных входов устройства, предназначенную для подключения выходных сигналов линейного объекта, входы включения компонент входных сигналов объекта контроля, входы регулировки коэффициентов передачи входных сигналов объекта контроля, входы включения компонент выходных сигналов объекта контроля входы регулировки коэффициентов передачи выходных сигналов объекта контроля сумматора соединены с одноименными выходами блока управления, вход признака рассогласования которого соединен с выходом порогового устройства и является выходом признака рассогласования канала контроля, вход начала настройки которого соединен с одноименным входом блока управления, выход признака исправности которого является одноименным выходом канала контроля, выходы признака рассогласования каналов контроля образуют первую группу информационных входов, блока анализа состояния линейного объекта, выходы признака исправности каналов контроля образуют вторую группу информационных входов блока анализа состояний линейного объекта, входы начала настройки каналов контроля соединены с выходом начала настройки блока анализа состояния линейного объекта, информационный выход которого подсоединен к информационному входу индикатора.
2, Устройство по п. 1,отличающее- с я тем, что блок управления содержит счетчик цикла, первый и второй триггеры, счетчик такта, первый и второй одновибраторы, первый и второй задатчики сигналов, первую и вторую группы ключей, первую и вторую группы счетчиков, первую и вторую группы цифроаналоговых преобразователей, схему сравнения, элемент И и генератор тактовых импульсов, выход которого соединен со счетным входом счетчика цикла, первым входом элемента И и информационными входами ключей первой и второй групп, управляющие входы первой группы соединены с первой группой выходов первого задатчика сигналов, а управляющие входы ключей второй группы соединены с первой группой выходов второго задатчика сигналов, адресные входы которого соединены с адресными входами первого задатчика сигналов и выходами счетчика такта, вход сброса которого соединен с входами сброса счетчика цикла, первого триггера, первой и второй групп счетчиков и выходом первого одновибратора, вход запуска которого соединен с выходом второго триггера и вторым входом элемента И, третий вход которого является входом признака рассогласования блока, а выход соединен со счет0 входом счетчика такта выход счетчика цикла соединен с входом установки первого триггера, выход которого соединен с входом запуска одновибратора, выход которого соединен с входом сброса второго триггера,
5 вход установки которого является входом признака начала настройки блока, счетные входы счетчиков первой и второй групп соединены с выходами ключей первой и второй групп, а выходы соединены с входами циф0 роаналоговых преобразователей первой и второй групп, выходы которых образуют выходы регулировки коэффициентов передачи соответственно вход ных и выходных сигналов объекта контроля, вторая группа выхо5 дов первого и второго задатчиков сигналов являются выходами включения компонент соответственно входных и выходных сигналов объекта контроля, выход первого триггера и выход схемы сравнения образуют
0 выход признака исправности блока, выходы счетчиков первой группы соединены с первой группой входов схемы сравнения, а выходы счетчиков второй группы соединены с второй группой входов схемы сравнения.
5
3. Устройство по п. 1,отличающеес я тем, что блок анализа состояния линейного объекта содержит с первого по пятый элементы И, первый и второй узлы согласо0 вания и одновибратор, выход которого является выходом начала настройки блока, входы первого элемента И являются первой группой информационных входов блока, а выход соединен с первым входом пятого
5 элемента И, второй вход которого соединен с выходом четвертого элемента И, первый и второй входы которого соединены соответственно с выходами второго и третьего эле- . ментов И, входы второго и третьего
0 элементов И являются второй группой информационных входов блока, входы второго элемента И соединены с входами узла согласования, входы третьего элемента И соединены с входами второго узла
5 Согласования, выходы первого и второго узлов согласования, четвертого и пятого элементов И образуют информационный выход блока.
$На6л.6
0/л5л.6
0/п5л.5
НаМ
Ho3.Z
НаЗ.м $Ho3.)
Но 3.1 Halt
НоЗ.м HaJ.(H4t)
НаЗ.1 На3.2
HffJ.Af
Ho3fM+f)
$//ffj.f
-наз.г
HoJM НаЗ.(м+1)
| название | год | авторы | номер документа |
|---|---|---|---|
| Система идентификации параметров многомерного нелинейного динамического объекта | 1986 |
|
SU1385122A1 |
| Телевизионный имитатор | 1981 |
|
SU965020A1 |
| Устройство для функционального контроля линейного объекта управления | 1983 |
|
SU1112346A1 |
| Взаимно-базисный корректор | 1986 |
|
SU1403382A1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ЕГО РЕАЛИЗУЮЩАЯ | 2013 |
|
RU2549615C2 |
| Устройство для прогнозирования случайных процессов | 1982 |
|
SU1120288A1 |
| Система технической диагностики динамических объектов | 1985 |
|
SU1401441A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2010 |
|
RU2437137C2 |
| Устройство для решения систем линейных алгебраических уравнений | 1985 |
|
SU1265810A1 |
| Система последовательного финитного управления конечным состоянием линейных стационарных динамических объектов | 1987 |
|
SU1467534A1 |
Сущность изобретения: устройство содержит п каналов 1 контроля, каждый из которых состоит из М + 1 сумматоров 3, М интеграторов 4, порогового блока 5, блока 2 управления, а также блок 6 анализа состоя- 1 ния линейного объекта и индикатор 7. ,2 з.п. ф-лы, 8 ил. ел С -vl СЛ СО Јь ся 4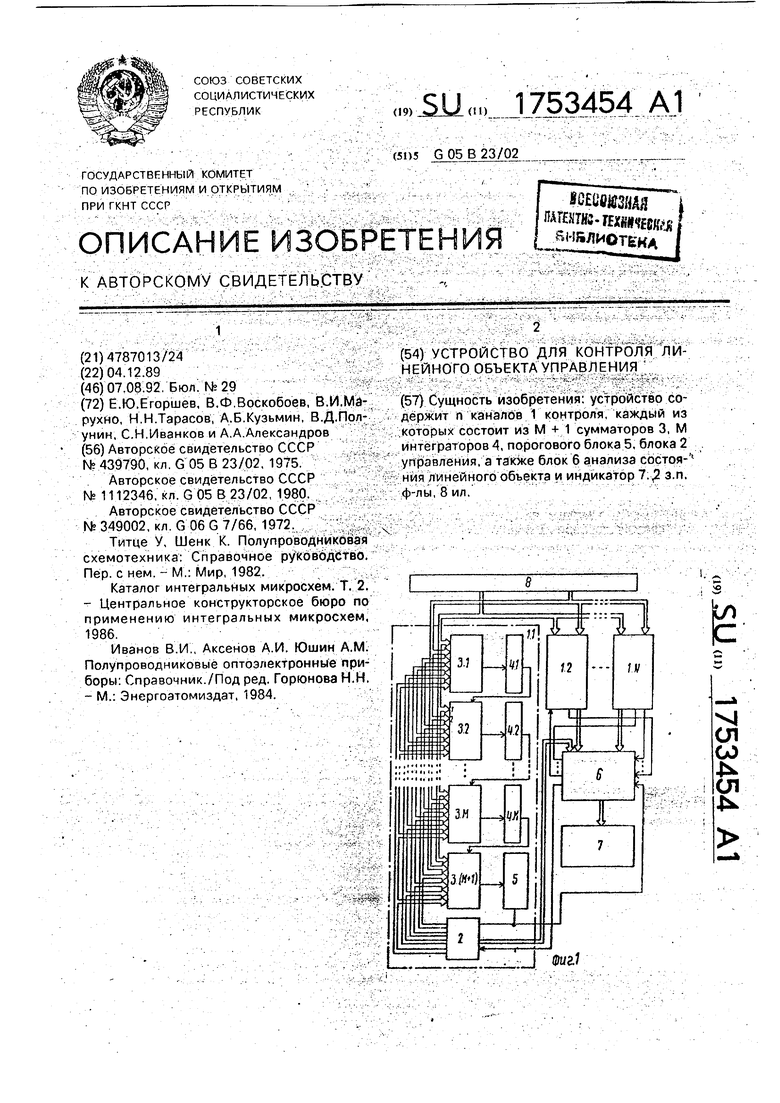
Фиг.г
e « ч «5 «5 5
fe %
о
°о
;
%
Ч
{«
« Г
«
л
U
«и
к Ч
to
На5л2 Канал ft 7 хамл (2
/ftw/r/yf
ОтблВ
Фиг В
| Устройство для функционального контроля систем управления | 1972 |
|
SU439790A1 |
| Устройство для функционального контроля линейного объекта управления | 1983 |
|
SU1112346A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| 0 |
|
SU349002A1 | |
| Титце У, Шенк К | |||
| Полупроводниковая схемотехника: Справочное руководство | |||
| Пер | |||
| с нем | |||
| - М.: Мир, 1982 | |||
| Каталог интегральных микросхем | |||
| Т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| -Центральное конструкторское бюро по применению интегральных микросхем, 1986 Иванов В.И , Аксенов А.И | |||
| Юшин A.M | |||
| Полупроводниковые оптоэлектронные приборы: Справочник /Под ред | |||
| Горюнова Н.Н | |||
| -М.: Энергоатомиздат, 1984. | |||
