Изобретение относится к горной технике и может быть использовано при создании систем регулирования производительности землечерпательных агрегатов и драг.
Целью изобретения является повышение точности определения крепости грунта.
На чертеже изображена блок-схема устройства.
К первому входу первого сумматора 1 подключен выход датчика 2 момента электропривода черпаковой цепи ЧЦ, к второму входу - выход дифференциатора 3, вход которого подсоединен к выходу датчика 4 скорости ЧЦ, к третьему входу - выход нуль- органа 5, вход которого подсоединен к выходу датчика 4 скорости, к четвертому входу- выход первого блока 6 умножения, к первому и второму входам которого подключены выходы датчика 7 положения черпаковой рамы и интегратора 8. Вход первого фильтра 9 подключен к выходу первого сумматора 1. Выход второго сумматора 10 через выпрямитель 11 подключен к второму фильтру 12. Первый вход второго сумматора 10 подсоединен к выходу первого сумматора 1, второй вход второго сумматора 10 подсоединен к выходу первого фильтра 9.
Выход первого блока 13 деления подключен к первому входу второго блока 14 деления, а его первый и второй входы подключены соответственно к выходам первого фильтра 9 и второго фильтра 12. К второму входу второго блока 14 деления подсоединен вы- ход первого фильтра 9. К первому и второму входам третьего сумматора 15 подсоединены соответственно выходы второго блока 14 деления и интегратора 8. К первому и второму входам второго блока 16 умножения подключены соответственно выход третьего сумматора 15 и датчика 4 скорости ЧЦ. Вход интегратора 8 соединен с выходом второго блока 16 умножения.
В качестве датчика 2 момента .может быть использован шунтовой датчик тока, в качестве датчика 7 положения черпаковой рамы - сельсин, сочлененный через редуктор с валом двигателя рамоподъемной лебедки.
Для достижения поставленной цели необ- ходимо вычислять момент подъема грунта, момент холостого хода ЧЦ, динамический момент привода ЧЦ. Вычисления производятся в соответствии с формулами:
М - icioo ./,ч
1доц-J - (I)
М„ ot- k«y,. Н;(2)
М« M,signco,(3)
где Мдц -динамический момент привода ЧЦ; J - момент инерции привода ЧЦ; си- скорость черпаковой цепи;
Мп-момент подъема грунта от нижнего до верхнего черпакового барабана; t.H средний коэффициент наполнения; Н - высота подъема грунта от нижнего до верхнего черпакового барабана; d- коэффициент пропорциональности; М,- момент холостого хода ЧЦ; . установка модуля момента холостого хода ЧЦ.
В устройстве Kj вычисляется по формулам:
0
5 5
0
50
-вМ.
5
ю at + op-li-,
(5)
где ду - коэффициенты пропорциональности;
М - постоянная составляющая момента.
Таким образом, k получают из k« усреднением по времени с помощью фильтра низкой частоты с постоянной времени, обратно пропорциональной скорости ЧЦ. Изменяемая постоянная времени позволяет производить усреднение за время, равное времени транспортирования породы по ЧЦ.
Устройство работает следующим образом.
В процессе драгирования одновременно регистрируют величину момента двигателя ЧЦ (сигнал М), скорость ЧЦ (сигнал со ) и высоту подъема черпаковой рамы (сигнал Н). Затем сигнал ш дифференцируют с
помощью дифференциатора 3 (сигнал -тт)
dbt
И с помощью нуль-органа 5 преобразуют в сигнал-установку момента холостого хода М . Одновременно перемножают сигналы высоты подъема черпаковой рамы Ц с сигналом К , характеризующим средний коэффициент наполнения черпаков. Затем сигнал с выхода блока 6 умножения (сигнал М„), сигнал М.д, сигнал -тг и сигнал
М алгебраически суммируют на сумматоре 1, в результате чего получают сигнал Мр, пропорциональный величине момента резания. Из этого сигнала выделяют усредненную во времени постоянную составляющую М и усредненную во времени переменную составляющую Мх , которые затем делят друг на друга с помощью блока 13 деления, и получают сигнал , пропорциональный крепости грунта.
Вычисление среднего коэффициента на- полне ния черпаков (k ) производится непрерывно автоматически согласно следующему алгоритму.
Сначала на блоке 14 деления осуществля W
ют операцию деления сигналов k р а затем с помощью сумматора 15, блока 16 умножения и интегратора 8 осуществляют
арифметическую операцию вычисления согласно формуле (5).
Таким образом, устройство позволяет уточнить крепость грунта, так как ведется обработка не сигнала нагрузки привода ЧЦ, включающего в себя составляющие от момента холостого хода ЧЦ, момента подъема грунта, динамического момента привода ЧЦ, а сигнала момента резания, величина которого зависит лищь от характера взаимоден- ствия породы и ЧЦ. Повыщение точности определения крепости грунта позволяет, в свою очередь, точнее оптимизировать режим резания черпающего аппарата драги, что в конечном итоге снижает энергозатраты реза ния и повыщает производительность черпа-
НИН.
Формула изобретения
Устройство определения крепости грунта при драгировании, содержащее датчик тока, два фильтра, выход первого из которых подключен к первому входу первого блока деления, нуль-орган, блок умножения и сумматор, отличающееся тем, что, с целью повы- щения точности определения крепости грун- та, оно снабжено дифференциатором, выпрямителем, датчиком положения черпаковой
рамы, интегратором, вторым блоком умножения, вторым и третьим сумматорами, вторым блоком деления и датчиком скорости, выход которого подключен к первому входу первого сумматора через нуль-орган, а к второму входу через дифференциатор, к третьему входу первого сумматора подключен датчик момента, к четвертому входу - первый блок умножения, а выход первого сумматора подключен к первому входу второго сумматора, выход которого через выпрямитель подключен к входу второго фильтра, а вход первого фильтра объединен с первым входом второго сумматора, выход первого фильтра подключен к вторым входам второго сумматора и первого блока деления, выход которого подключен к первому входу второго блока деления, второй вход которого объединен с вторым входом первого блока деления, а выход второго блока деления подключен к первому входу третьего сумматора, выход которого подключен к первому входу второго блока умножения, к второму входу которого подключен выход датчика скорости, а выход второго блока умножения через интегратор подключен к второму входу третьего сумматора и к первому входу первого блока умножения, к второму входу которого подключен датчик положения черпаковой рамы.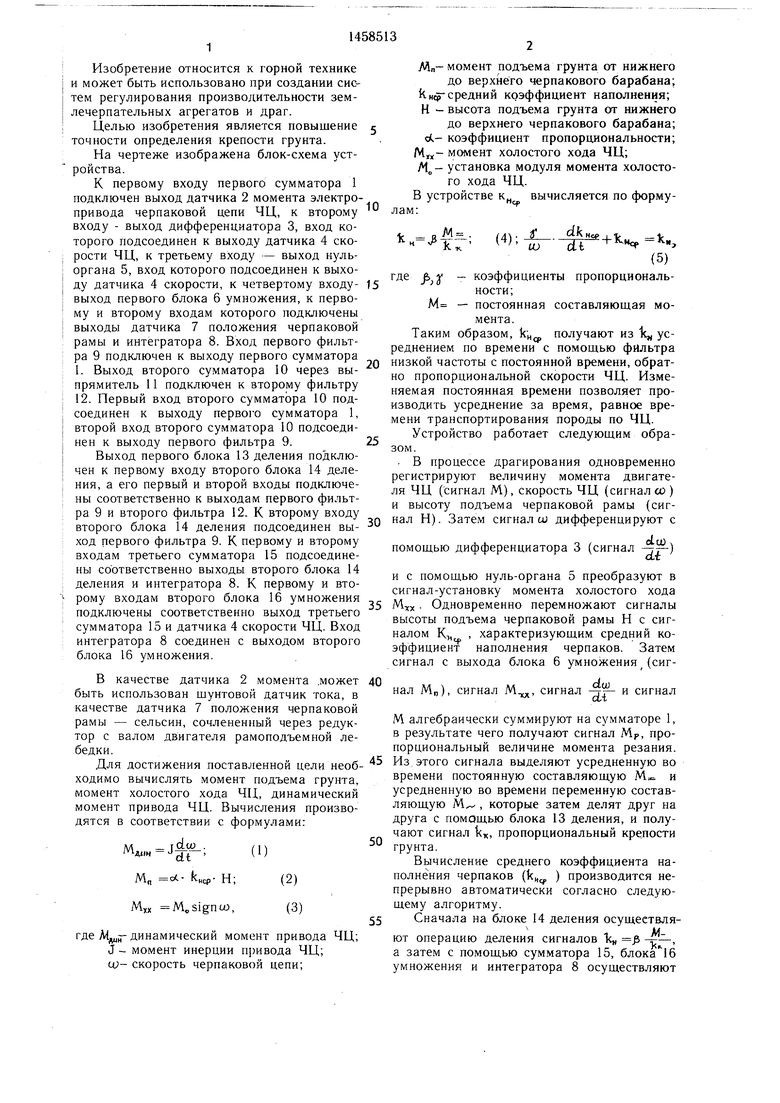

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения крепости грунта при драгировании | 1985 |
|
SU1268672A1 |
| Устройство регулирования производительности драги | 1986 |
|
SU1372018A1 |
| Устройство управления добычным комплексом драги | 1987 |
|
SU1481428A1 |
| Способ определения крепости грунта при драгировании | 1983 |
|
SU1129289A1 |
| Весовой дозатор непрерывного действия | 1986 |
|
SU1339410A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КРЕПОСТИ ГРУНТА ПРИ ДРАГИРОВАНИИ | 1971 |
|
SU307192A1 |
| Устройство контроля категории крепости грунта при драгировании | 1983 |
|
SU1106900A1 |
| Устройство управления добычным комплексом драги | 1980 |
|
SU972005A1 |
| Устройство управления добычным комплексом драги | 1982 |
|
SU1114745A1 |
| Адаптивный измеритель расхода сыпучих материалов | 1981 |
|
SU1044986A1 |
Изобретение относится к горной технике и м.б. использовано при создании систем регулирования производительности землечерпательных агрегатов. Цель изобретения - повышение точности определения крепости грунта. Устройство содержит датчик 2 момента, подключенный к сумматору (С) 1. Вы.ход С 1 через С 10, выпрямитель 11, фильтр (Ф) 12 подключен к блоку деления (БД) 13. К второму входу БД 13 подключен Ф9, а выход БД 13 подключен к входу БД 14. Выход БД 14 через С 15, блок умножения 16, интегратор 8 и блок 6 умножения подключен к С1. К другому входу С1 подключен нуль-орган 5. Устройство снабжено датчиком 4 скорости, подключенным к входу нуль-органа 5, дифференциатором 3. под- к,1юченным к С1, и датчиком 7 положения черпаковой рамы, подключенным к входу блока 6 умножения. С датчиков 2, 4, 7 сигналы, пропорциональные моменту холостого хода черпаковой цепи, динамическому моменту привода черпаковой цепи и моменту подъема груза, поступают на входы С1, где алгебраически суммируются и на выходе С1 получают сигнал, пропорциональный моменту резания. Затем с помощью Ф9 и 12 из этого сигнала выделяют усредненные постоянную и переменную составляющие, делят их друг на друга в БД 13 и на его выходе получают сигнал, пропорциональный крепости грунта. Затем в БД 14 осуществляют деление сигнала постоянной составляющей момента резания на сигнал, пропорциональный крепости грунта. С помощью С15, блока 16 умножения и интегратора 8 вычисляют средний коэф. наполнения черпаков. 1 ил. (О (Л 4;: СП 00 ел со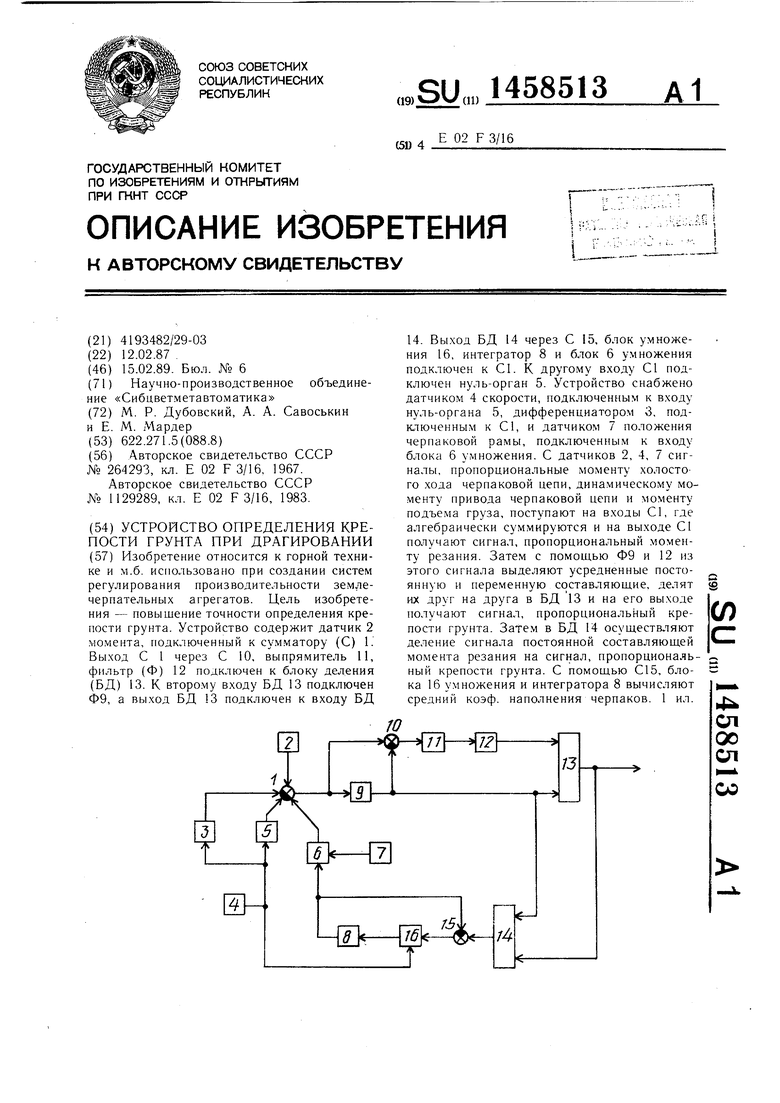
| СПОСОБ ОПРЕДЕЛЕНИЯ КРЕПОСТИ ГРУНТА ПРИ ДРАГИРОВАНИИ | 0 |
|
SU264293A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ определения крепости грунта при драгировании | 1983 |
|
SU1129289A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
