1
Изобретение относится к разделению твердых материалов, в частности руд, плодоовощных культур и различных изделий, и может быть использовано для автоматической сортировки сырья и продуктов, в горнодобывающей, плодоовощеперерабатываю- щей, металлообрабатывающей и других отраслях промыщленности.
Цель изобретения - повыщение производительности сортировки.
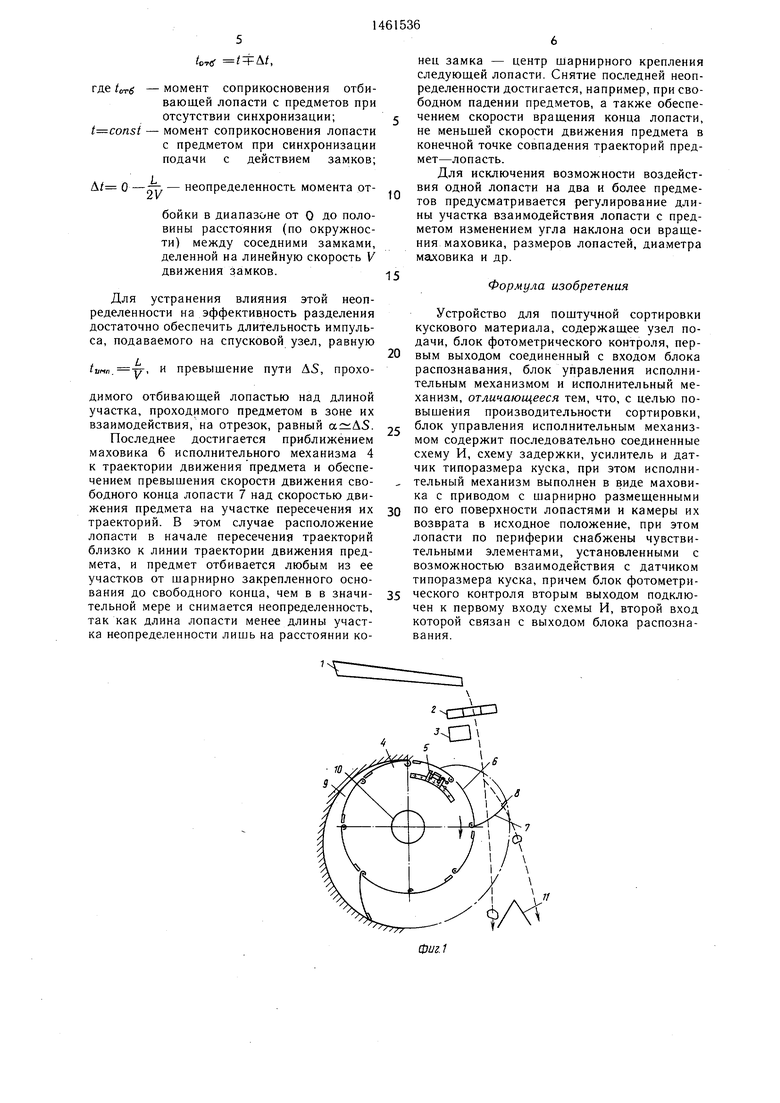
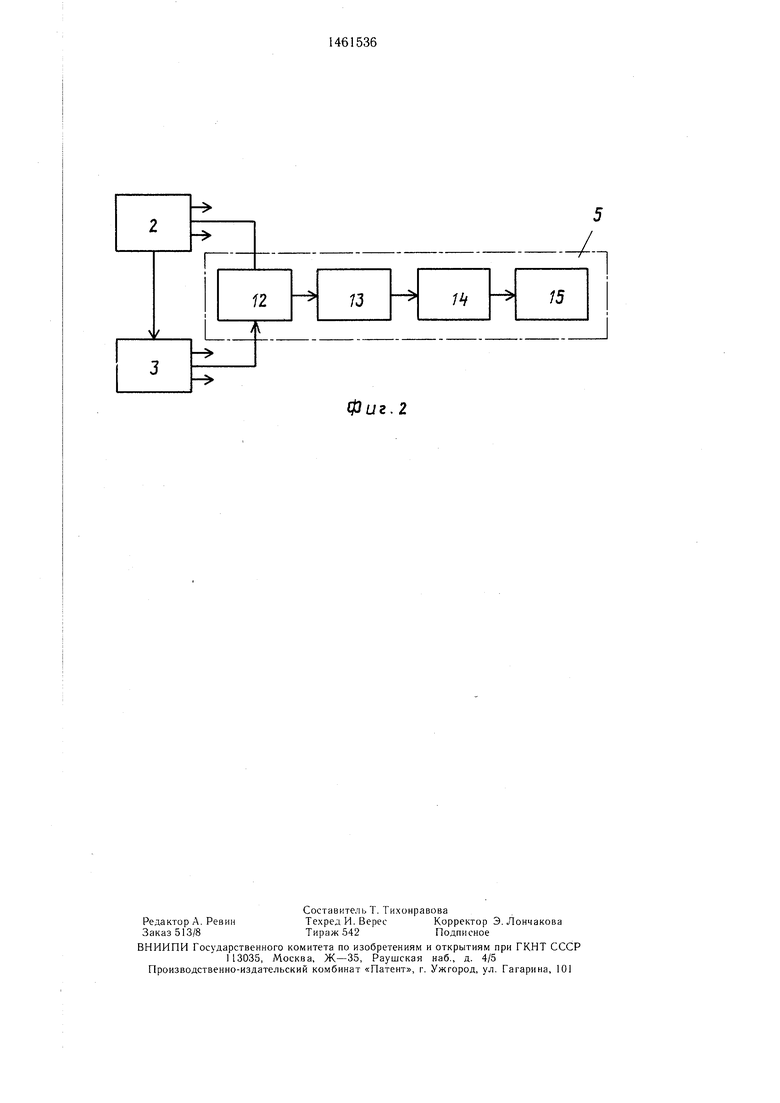
На фиг. 1 изображена схема предлагаемого устройства; на фиг. 2 - схема электрических соединений блоков.
Устройство содержит транспортный узел 1 подачи, блок 2 фотометрического контроля, блок 3 распознавания, исполнительный механизм 4, блок 5 управления исполнительным механизмом, маховик 6, лопасти 7, чувствительные элементы 8, камеру 9 возврата лопастей, привод 10 и приемники 11
для рассортированного материала. Блок 5 управления содержит схему И 12, схему 13 задержки, усилитель 14 и датчик 15 типоразмера куска.
Транспортный узел 1 включает ленточный или иной конвейер, вибропитатель и т. д. и служит для подачи предметов в зону регистрации фотометрического блока 2 и блока 3 распознавания.
Блок 2 служит для определения местоположения предмета и вырабатывает сигнал наличия предмета для блока 3 распознавания и блока 5 управления. Блок 2 включает, например, источник света и фотодиоды, которые и вырабатывают сигнал при перекрытии предметом источника света.
Блок 3 распознавания определяет сортность предметов и выполняется на базе электромагнитных, рентгеновских или других
4
СГд
СП
00 05
ядернофизических методов элементного или фазового бесконтактного контроля.
Сигнал, вырабатываемый блоком 3, служит для срабатывания блока 5 управления.
Блок 5 служит для освобождения лопастей 7 по сигналам блока 2 и блока 3.
Маховик 6 представляет собой цилиндр вращения.
Лопасти 7, закрепленные шарнирно на маховике 6, представляют собой лопатки металлические, резиновые или армированные износостойким материалом (полиуретан и др.) с закрепленными на их свободных концах чувствительными элементами 8. Лопасти 7 служат для отбойки предметов выделяемых сортов. Шарнирная часть лопасти 7 имеет ограничитель поворота лопасти относительно маховика на угол 90°.
Для улучшения срабатывания при малых скоростях вращения маховика лопасти подпружинены, например, пластинчатыми пружинами.
Чувствительные элементы 8 могут быть различной конструкции и представляют собой, например, постоянные магниты, вакуумные присоски или механические зацепы.
Возвратная камера 9 состоит из спиралеобразного пространства, ограниченного плавно сходящимися стенками - внещней поверхностью маховика 6 и внутренней поверхностью кожуха исполнительного механизма 4. С боковых сторон возвратная камера 9 может быть ограничена перегородками (например, ребрами жесткости кожуха).
Привод 10 состоит из электромотора с регулируемой скоростью вращения и редуктора. При использовании в качестве транспортного узла роликового транспортера может использоваться его привод (через цепную или другую передачу).
Приемники 11 для рассортированного материала содержат направляющие для корректировки движения предметов после их выведения из общего потока (сортировки) и емкости для складирования предметов, соответствующие по числу количеству выделяемых сортов.
Устройство работает следующим образом.
При поступлении последовательности предметов и сходе первого из них с транспортного узла 1, предмет попадает в зону видимости фотометрического блока 2, который вырабатывает сигнал, запускающий в работу и выключающий блок 3 распознавания и поступающий на спусковой узел с задержкой, соответствую1дей времени прохождения предмета до зоны действия исполнительного механизма 4. Блок 3 распознавания определяет сортность предмета и в зависимости от результата передает или не передает сигнал на блок 5 управления исполнительного механизма 4.
Блок 5 срабатывает, если на его вход одновременно поступают сигнал с блока 3 и сигнал с блока 2.
Сигнал с блока 3 указывает на сорт предмета, сигнал с блока 2 синхронизирует работу лопасти 7 с движением предмета, подлежащего выведению из последовательности потока предметов.
При поступлении сигнала с блока 2 и отQ сутствии сигнала с блока 3 результирующий сигнал со схемы И 12 на датчик 15 не проходит, в результате чего лопасть 7 остается в нерабочем (закрытом) положении. При срабатывании датчик 15 воздейст; вует на чувствительный элемент 8, освобож5 дающий лопасть 7, которая под действием центробежной силы и упругой силы пластинчатой пружины отходит незакрепленной частью от маховика 6, и вращаясь вокруг щарнирного крепления, производит выведе„ ние подлежащего отбору предмета из потока материала в соответствующий сорту материала приемник.
Находящаяся в открытом положении лопасть 7, двигаясь далее по ходу вращения маховика 6, достигает возвратной каме5 ры 9 и под действием воздуха, сжимаемого в сужающемся пространстве возвратной камеры, и механического воздействия при соприкосновении с внутренней поверхностью кожуха постепенно возвращается в закрытое положение, при этом чувствительный
элемент 8 срабатывает. При подходе к датчику 15 лопасть 7 вновь готова к операции сортировки.
В зависимости от изменений частоты подачи предметов работа элементов 8 может быть синхронизированной или независимой
от частоты подачи. При постоянной частоте подачи (калиброванные предметы при виброподаче или подаче ленточным конвейером, подача предметов разных по размерам рольгангами и т. д.) регулированием скорости
0 вращения маховика при настройке достигают одинаковой частоты подачи предметов и частоты прохождения элемента 8 мимо датчика 15. В этом случае отбойка предметов происходит в одной наперед заданной точке траектории движения предметов,
5 местоположение которой выбирается смеще- нием положения датчика 15 и элементов 8 или взаимного расположения транспортного узла 1 и исполнительного механизма 4. При переменной частоте поступления предметов (материал различной крупности,
0 подаваемый вибропитателем и т. д.) настройка скорости вращения маховика 6 производится для максимально возможной частоты подачи, а реальное поступление предметов может быть независимым от частоты
5 прохождения элемента 8 мимо датчика 15. В этом случае возникает неопределенность момента отбойки предмета в диапазоне, равном
W -i-A/,
где tore - момент соприкосновения отбивающей лопасти с предметов при отсутствии синхронизации;
t consi - момент соприкосновения лопасти с предметом при синхронизации подачи с действием замков;
А О-гг - неопределенность момента отбойки в диапазоне от Q до половины расстояния (по окружности) между соседними замками, деленной на линейную скорость V движения замков.
Для устранения влияния этой неопределенности на эффективность разделения достаточно обеспечить длительность импульса, подаваемого на спусковой узел, равную
1/«п.у, и превышение пути AS, проходимого отбивающей лопастью над длиной участка, проходимого предметом в зоне их взаимодействия, на отрезок, равный ac±AS. Последнее достигается приближением маховика 6 исполнительного механизма 4 к траектории движения предмета и обеспечением превышения скорости движения свободного конца лопасти 7 над скоростью движения предмета на участке пересечения их траекторий. В этом случае расположение лопасти в начале пересечения траекторий близко к линии траектории движения предмета, и предмет отбивается любым из ее участков от щарнирно закрепленного основания до свободного конца, чем в в значи- тельной мере и снимается неопределенность, так как длина лопасти менее длины участка неопределенности лишь на расстоянии ко
с
О 5
0
5
нец замка - центр шарнирного крепления следующей лопасти. Снятие последней неопределенности достигается, например, при свободном падении предметов, а также обеспечением скорости вращения конца лопасти, не меньшей скорости движения предмета в конечной точке совпадения траекторий предмет-лопасть.
Для исключения возможности воздействия одной лопасти на два и более предметов предусматривается регулирование длины участка взаимодействия лопасти с предметом изменением угла наклона оси вращения маховика, размеров лопастей, диаметра маловика и др.
Формула изобретения
Устройство для поштучной сортировки кускового материала, содержащее узел подачи, блок фотометрического контроля, первым выходом соединенный с входом блока распознавания, блок управления исполнительным механизмом и исполнительный механизм, отличающееся тем, что, с целью повышения производительности сортировки, блок управления исполнительным механизмом содержит последовательно соединенные схему И, схему задержки, усилитель и датчик типоразмера куска, при этом исполнительный механизм выполнен в виде маховика с приводом с шарнирно размещенными по его поверхности лопастями и камеры их возврата в исходное положение, при этом лопасти по периферии снабжены чувствительными элементами, установленными с возможностью взаимодействия с датчиком типоразмера куска, причем блок фотометрического контроля вторым выходом подключен к первому входу схемы И, второй вход которой связан с выходом блока распознавания.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СОРТИРОВКИ ОБЪЕКТОВ ПО ВИЗУАЛЬНЫМ ПРИЗНАКАМ | 2010 |
|
RU2424859C1 |
| СПОСОБ СОРТИРОВКИ МИНЕРАЛЬНОГО СЫРЬЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2471563C1 |
| СПОСОБ СЕПАРАЦИИ РУДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2046031C1 |
| Сортирующее устройство | 1987 |
|
SU1461537A1 |
| Устройство для сортировки объектов по типоразмеру | 1984 |
|
SU1212631A1 |
| Устройство для сортировки плодов | 1980 |
|
SU935138A1 |
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС ПО СОРТИРОВКЕ ИСПОЛЬЗОВАННОЙ ТАРЫ | 2021 |
|
RU2782408C1 |
| Способ измерения расхода жидкого носителя, использующий эффект Кориолиса | 2022 |
|
RU2804749C1 |
| СПОСОБ УПРАВЛЕНИЯ ГОРНЫМ КОМБАЙНОМ С ПЛАНЕТАРНО-ДИСКОВЫМ ИСПОЛНИТЕЛЬНЫМ ОРГАНОМ | 2016 |
|
RU2618630C1 |
| РУДОСЕПАРАЦИОННЫЙ МОДУЛЬ | 2010 |
|
RU2422210C1 |
Изобретение относится к разделению твердых материалов, в частности руд, плодоовощных культур и различных технических изделий, и может быть использовано для автоматической сортировки сырья и продук- тов в горнодобывающей, плодоовощеперера- батывающей и других отраслях промыщлен- ности, и позволяет повысить производительность сортировки. Устройство содержит транспортный узел, блок фотометрического контроля, блок распознавания, исполнитель-- ный механизм, выполненный в биде маховика с лопастями, снабженными чувствительными элементами, установленными с возможностью взаимодействия с датчиком сигнала спуска блока управления, содержащего схему И, схему задержки и усилитель. 2 ил. Ш (Л
Фиг.2
| Устройство для сортировки штучных предметов | 1982 |
|
SU1171125A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
