Известны механизмы для осуществления возвратно-поступательного движения с поршневым двигателем, цилиндр которого связан с исполнительным органом (см., например, книгу Ф. Джонсона и X. Хортона «Механизмы автоматического действия, Машгиз, 1961 г.).
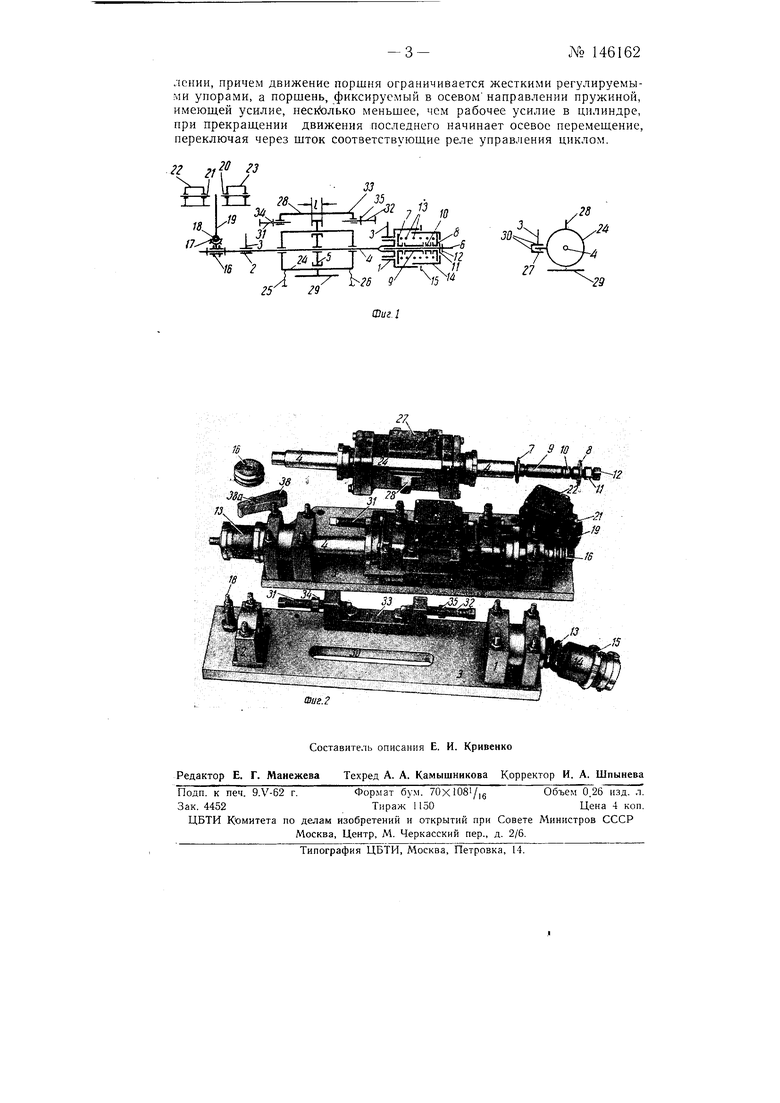
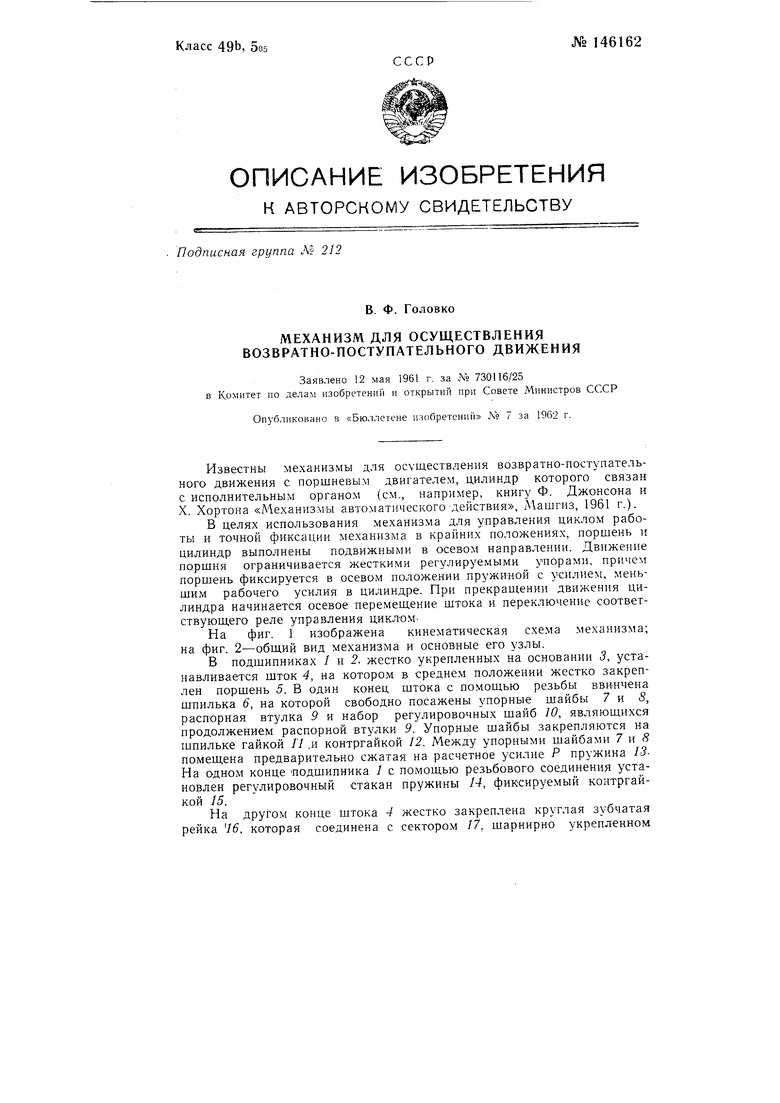
В целях использования механизма для управления циклом работы и точной фиксации механизма в крайних положениях, поршень и цилиндр выполнены подвижными в осевом направлении. Движение поршня ограничивается жесткими регулируемыми упорами, причем поршень фиксируется в осевом положении пружиной с усилием, меньшим рабочего усилия в цилиндре. При прекращении движения цилиндра начинается осевое перемещение штока и переключение соответствующего реле управления цикломНа фиг. 1 изображена кинематическая схема механизма; на фиг. 2-общий вид механизма и основные его узлы.
В подшипниках / и 2, жестко укрепленных на основании 3, устанавливается шток 4, на котором в среднем положении жестко закреплен поршень 5. В один конец штока с помощью резьбы ввинчена шпилька 6, на которой свободно посажены упорные шайбы 7 и S, распорная втулка 9 и набор регулировочных шайб /О, являющихся продолжением распорной втулки 9. Упорные шайбы закрепляются на шпильке гайкой 11 .и контргайкой 12. Между упорными шайбами 7 м 8 помещена предварительно сжатая на расчетное усилие Р пружина 13На одном конце подшипника 1 с помощью резьбового соединения установлен регулировочный стакан пружины /4, фиксируемый контргайкой 15.
На другом конце штока 4 жестко закреплена круглая зубчатая рейка 75, которая соединена с сектором /7, шарнирно укрепленном
№ 146162-2на пальце 18. Палец закреплен на основании 3. Вместе с сектором 17 на пальце 18 вращается рычаг 19, который взаимодействует со штоками 20 и 21 командо-аппаратов 22 и 23.
На штоке 4, свободно для осевого перемещения, посажен цилиндр 24, который посредством гибких шлангов 25 и 26 соединен с системой питания (гидравлической или пневматической).
На наружной поверхности цилиндра в виде приливов имеются противоповоротный упор 27, калиброванный шаговый упор 28, и площадка для крепления рабочих органов 29. Противоповоротный упор 27 перемещается в осевом направлении по пазу 30 в основании 3 и препятствует радиальному перемещению цилиндра 24. Калиброванный щаговый упор 28 имеет калиброванный размер / и взаимодействует с регулировочными болтами 31 и 32, которые крепятся на кронштейне 33. Регулировочные болты фиксируются контргайками 34 и 35.
Шток 4 имеет возможность перемещаться в подшипнике / в ту и другую сторону, для чего ему необходимо преодолеть сопротивление пружины 13, сжатой иа расчетное усилие Р.
Для определения нагрузки штока и приведение его в исходное положение необходимо:
установить усилие сжатия пружины Р и ее рабочую длину;
выяснить необходимый ход штока, обеспечивающий нормальную работу командо-аппаратов;
определить длину распорной втулки, исходя из рабочей (предварительно сжатой) длины пружины;
завернуть регулировочный стакан пружины в корпус подшипника 1 до полного уплотнения деталей на шпильке и навернуть на шпильку регулировочную гайку.
В результате этих операций шток окажется жестко связанным с подшипником /, а пружина сжатой по заданным параметрам работы механизма.
Для установки штока в рабочее положение необходимо регулировочный стакан пружины и регулировочную гайку отвернуть на заданную величину хода штока и законтрить соответственно контргайками. При этом пружина разожмется и переместит вправо упорную шайбу 8, образующую необходимый зазор с распорной втулкой.
В цилиндр 24 через шланги 25 и 26 попеременно подается воздух или жидкость с определенным давлением, развивающим максимальное усилие до 600 кг. Так как щток 4 через пружину 13 и подшипник / связан с основанием механизма 3, цилиндр 24 придет в движение и преодолеет сопротивление до 550 кг. Пройдя расстояние 100 мм, заданное регулировочными болтами 31 и 32, цилиндр совершит требуемую работу и остановится упором 28. В цилиндре повысятся давление и усилие на поршень 5 до 600 /сг; после этого поршень начнет движение вместе со щтоком 4, преодолевая сопротивление пружины в 550 кг. Шток 4, двигаясь через зубчатую рейку 16, сектор 17, рычаг 19 и штоки 20 и 21, выключит соответствующий командо-аппарат 22 или 23.
Предмет изобретения
Механизм для осуществления возвратно-поступательного движения с поршневым двигателем, цилиндр которого связан с исполнительным органом, отличающийся тем, что, с целью использования его для управления циклом своей работы и точной фиксации в крайних положениях, поршень и цилиндр выполнены подвижными в осевом направлснии, причем движение поршня ограничивается жесткими регу.тируемыми упорами, а поршень, фиксируемый в осевом направлении пружиной, имеюш,ей усилие, иесколько меньшее, чем рабочее усилие в цилиндре, при прекраш,ении движения последнего начинает осевое перемеихение, переключая через шток соответствуюшие реле управления циклом.
17.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ УДАРНЫХ И ВИБРАЦИОННЫХ ВОЗДЕЙСТВИЙ | 2016 |
|
RU2629514C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПРИЖАТИЯ ДЕТАЛЕЙ ПРИ ИХ ПРИКЛЕИВАНИИ | 2004 |
|
RU2272185C2 |
| АВТОМАТИЧЕСКИЙ СТОЯНОЧНЫЙ ТОРМОЗ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА И УЗЕЛ ЕГО ОТКЛЮЧЕНИЯ | 2020 |
|
RU2733839C1 |
| Стационарное страховочное устройство | 2017 |
|
RU2653048C1 |
| НАДДОЛОТНЫЙ ЛУБРИКАТОР | 1990 |
|
RU2013515C1 |
| УСТРОЙСТВО для УДАРНОГО ДЕФОРМИРОВАНИЯ | 1973 |
|
SU388808A1 |
| Веломобиль с пневмоаккумуляторным приводом | 1988 |
|
SU1717471A1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |
| Импульсный податчик бурового инструмента | 2015 |
|
RU2620657C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2023 |
|
RU2808302C1 |